Система електродинамічного підвісу магнітолевітуючого транспортного засобу
Номер патенту: 91569
Опубліковано: 10.08.2010
Автори: Радченко Микола Олексійович, Кузнєцова Тетяна Іванівна, Дзензерський Віктор Олександрович, Хачапурідзе Микола Михайлович, Філоненко Лідія Олександрівна
Формула / Реферат
Система електродинамічного підвісу магнітолевітуючого транспортного засобу, що містить виконану плоскою шляхову структуру з закріпленими на ній прямокутними короткозамкненими контурами, з якими взаємодіють розташовані на донних поверхнях візків транспортного засобу надпровідні магніти соленоїдного типу, яка відрізняється тим, що містить два ряди згаданих короткозамкнених контурів, які максимально рознесені в поперечному напрямі на ширину візків, та два ряди відповідних надпровідних магнітів, ширина соленоїдів яких менша, ніж ширина контурів, причому певні розміри соленоїдів та контурів та їх взаєморозташування вибрані в залежності від параметрів конкретної транспортної системи з умов стійкості левітаційного руху транспортного засобу в прямолінійних і криволінійних ділянках шляху таким чином, щоб проекції повздовжніх осей соленоїдів на площину відповідних ним контурів збігалися з повздовжніми осями останніх у стані рівноваги, а окреслення шляхової структури визначало напрямок руху транспортного засобу.
Текст
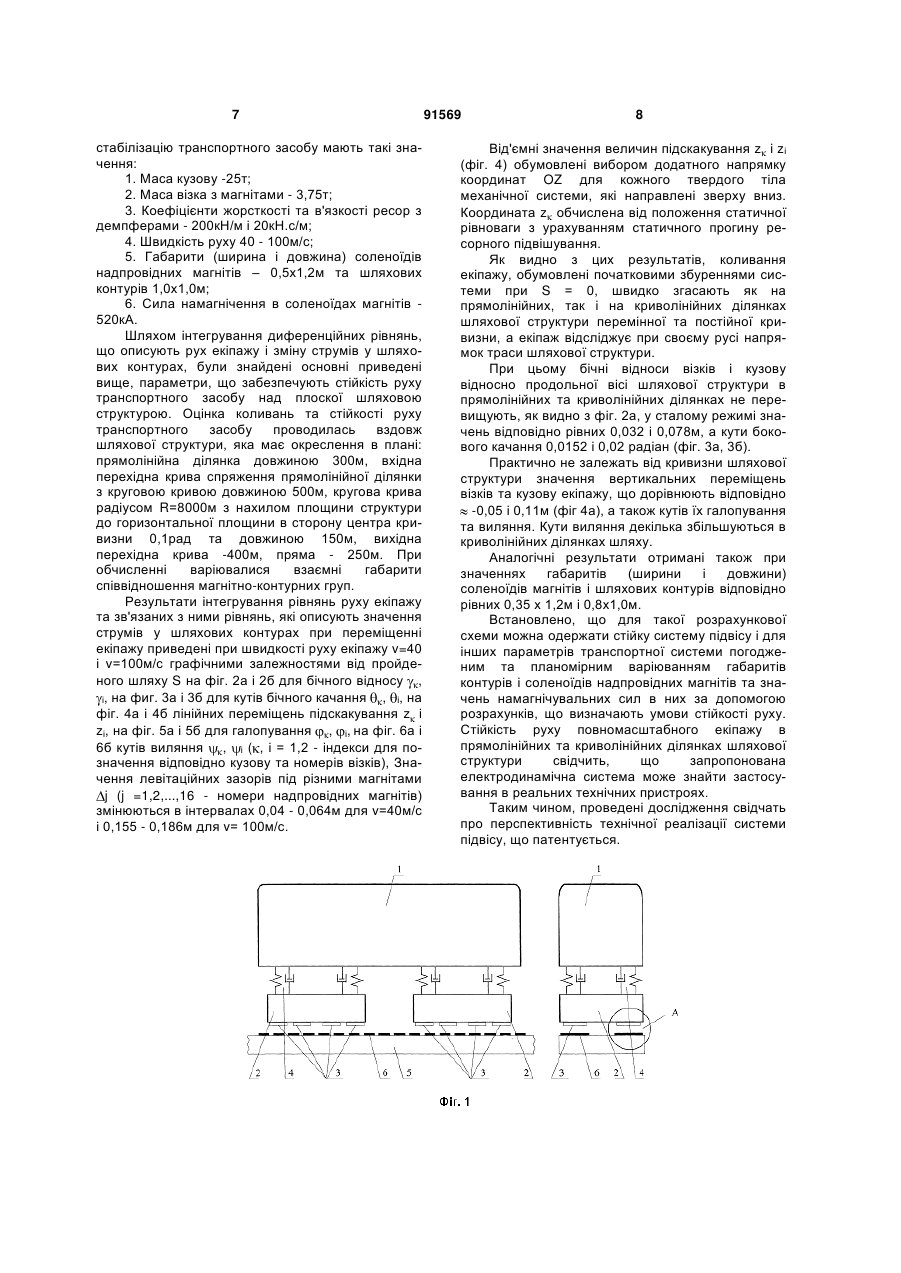
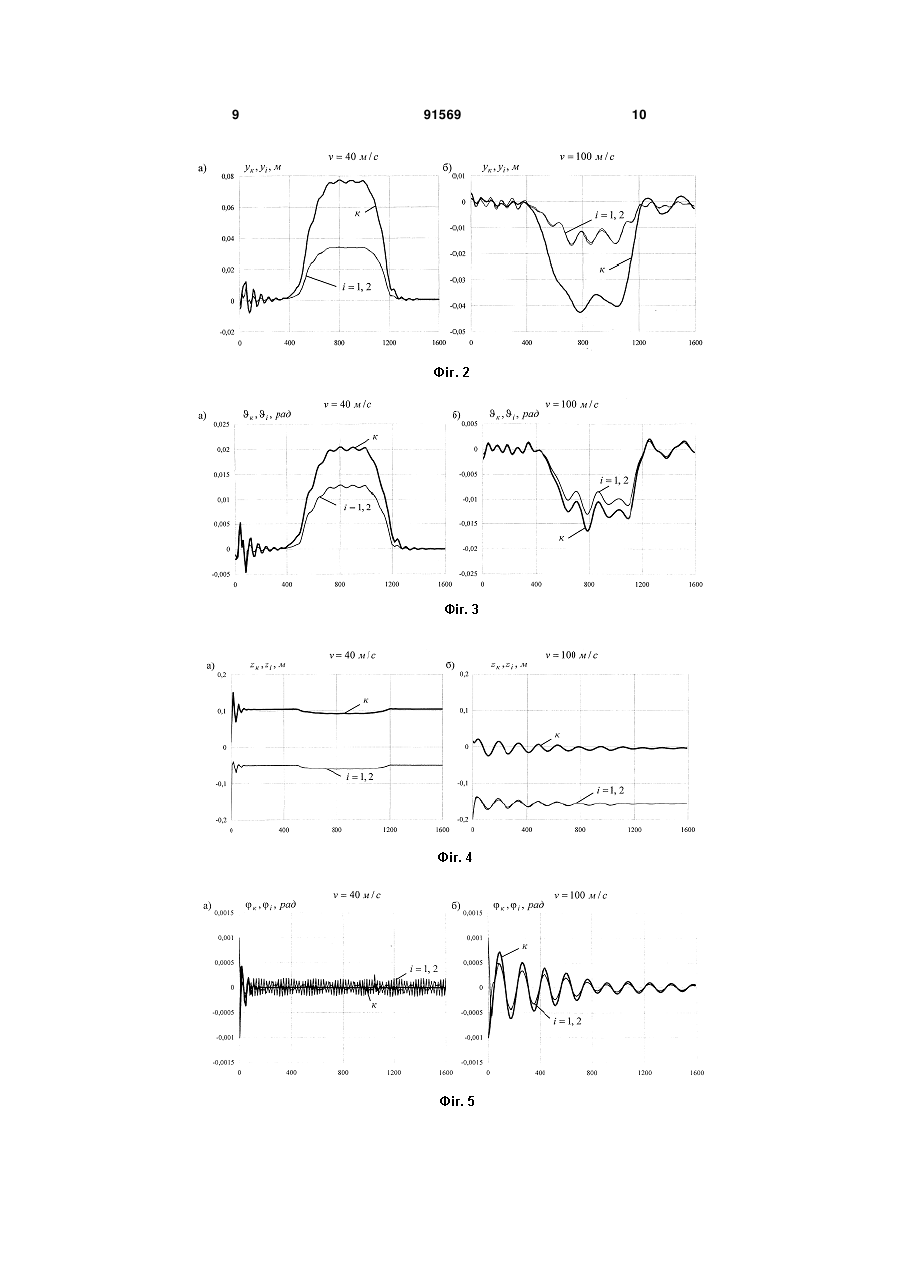
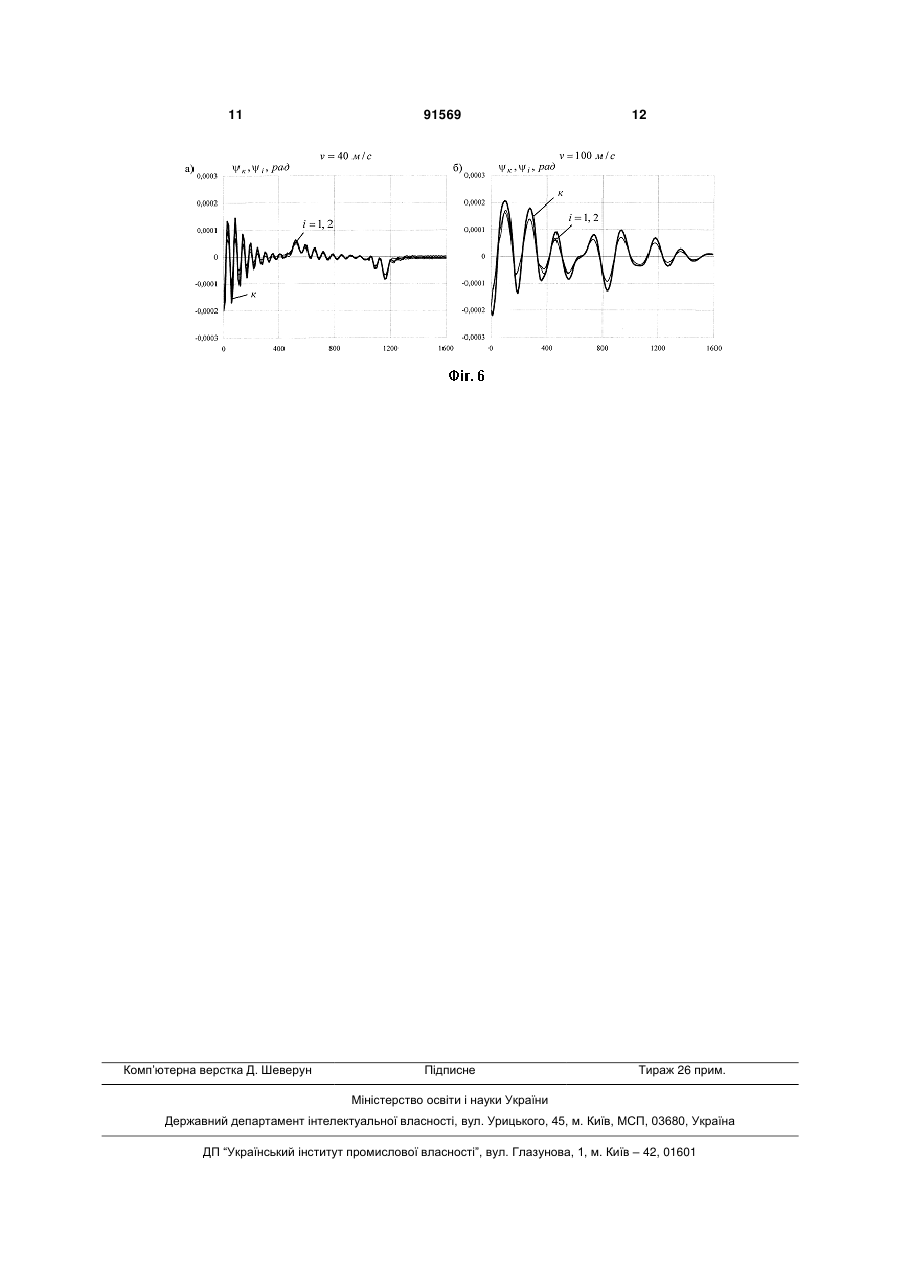
Система електродинамічного підвісу магнітолевітуючого транспортного засобу, що містить виконану плоскою шляхову структуру з закріпленими на ній прямокутними короткозамкненими контурами, з якими взаємодіють розташовані на донних поверхнях візків транспортного засобу надпровідні магніти соленоїдного типу, яка відрізняється тим, що містить два ряди згаданих короткозамкнених контурів, які максимально рознесені в поперечному напрямі на ширину візків, та два ряди відповідних надпровідних магнітів, ширина соленоїдів яких менша, ніж ширина контурів, причому певні розміри соленоїдів та контурів та їх взаєморозташування вибрані в залежності від параметрів конкретної транспортної системи з умов стійкості левітаційного руху транспортного засобу в прямолінійних і криволінійних ділянках шляху таким чином, щоб проекції повздовжніх осей соленоїдів на площину відповідних ним контурів збігалися з повздовжніми осями останніх у стані рівноваги, а окреслення шляхової структури визначало напрямок руху транспортного засобу. UA (21) a200807227 (22) 26.05.2008 (24) 10.08.2010 (46) 10.08.2010, Бюл.№ 15, 2010 р. (72) ДЗЕНЗЕРСЬКИЙ ВІКТОР ОЛЕКСАНДРОВИЧ, КУЗНЄЦОВА ТЕТЯНА ІВАНІВНА, РАДЧЕНКО МИКОЛА ОЛЕКСІЙОВИЧ, ФІЛОНЕНКО ЛІДІЯ ОЛЕКСАНДРІВНА, ХАЧАПУРІДЗЕ МИКОЛА МИХАЙЛОВИЧ (73) ІНСТИТУТ ТРАНСПОРТНИХ СИСТЕМ І ТЕХНОЛОГІЙ НАЦІОНАЛЬНОЇ АКАДЕМІЇ НАУК УКРАЇНИ "ТРАНСМАГ" (56) US 5669310; 23.09.1997 US 3858521; 07.01.1975 WO 9933961 A1; 08.07.1999 SU 684839; 05.03.1980 US 3855939; 24.12.1974 US 5631617; 20.05.1997 US 5517924; 21.05.1996 US 20080029368 A1; 07.02.2008 UA 69977 A; 15.09.2004 C2 2 (19) 1 3 найбільш небезпечних причин втрати стійкості руху, особливо при високому розташуванні центру ваги транспортного засобу над шляховими контурами. Основною вадою цього технічного рішення є складна конструкція ходових частин транспортного засобу і шляхової структури внаслідок їх профільованого окреслення в поперечному перерізі. Найбільш близьким технічним рішенням, взятим як прототип даного винаходу, є система стабілізованого підвісу магнітолевітуючого транспортного засобу за а. с. № 69977А 7 В 60 L 13/04, опублікованим 15.09.04p., автора В.О. Дзензерський, О.А. Зевін, М.О. Радченко. В цьому технічному рішенні, на відміну від описаних вище рішень, шляхова структура і донні поверхні візків виконані плоскими, до яких прикріплені відповідно короткозамкнені шляхові контури і надпровідні магніти. Стабілізація руху транспортного засобу цієї системи при його просторових коливаннях досягається шляхом застосування як пружнодисипативних елементів між візками та корпусом, так і шляхом застосування чотирьох смуг шляхових короткозамкнених контурів (по дві смуги під кожним рядом надпровідних магнітів). Кожна смуга контурів у сталому режимі руху знаходиться під своїм рядом надпровідних магнітів таким чином, що проекція центрів ваги магнітів на площину шляхового полотна проходить по середній лінії між рядами контурів. Завдяки цьому при раціональному виборі розмірів контурів, магнітів та зазорів між рядами шляхових контурів досягається стійкість руху транспортного засобу у двох вертикальних та горизонтальній площинах, тобто при просторових його коливаннях. При цьому положення проекцій повздовжніх вісей надпровідних магнітів на площину шляхових контурів не виходять в процесі руху транспортного засобу за межі зазору між двома рядами шляхових контурів в прямолінійних і криволінійних ділянках шляху завдяки протилежному напрямку магнітних сил, діючих від повздовжніх сторін контурів на надпровідні магніти. В результаті такого характеру взаємодії сумарні бічні сили, діючі на екіпаж, є відновлюючими. Недоліком такої транспортної системи є багаторядна (чотирьохрядна) струмопровідна шляхова структура, що може негативно позначитися на її вартості. У винаході, що описується, пропонується установити вздовж шляхової структури два ряди струмопровідних короткозамкнених прямокутних контурів, рознесених у поперечному напрямі по ширині транспортного засобу, а на донних поверхнях візків-два ряди надпровідних магнітів (по одному ряду над кожним рядом контурів шляхової структури). При цьому ширина контурів повинна бути більшою, ніж ширина соленоїдів надпровідних магнітів. Ціль даного винаходу, є створення системи електродинамічного підвісу магнітолевітуючого транспортного засобу, який забезпечує стійкість його руху, демпфірує всі можливі види коливань та 91569 4 гарантує їх швидке загасання в прямолінійних та криволінійних ділянках плоскої шляхової структури з двома рядами короткозамкнених струмопровідних контурів (на відміну від основного прототипу), що приводить до спрощення та здешевлення конструкції шляхової структури порівняно з технічним рішенням прототипу. Взаємне розміщення двох рядів магнітів та відповідних їм рядів шляхових контурів, рознесених на максимально можливу відстань по обидві сторони від продольної вісі в поперечному напрямку, повинно бути таким, щоб проекції на площину контурів повздовжніх вісей магнітів проходили в стані рівноваги транспортного засобу по повздовжнім вісям відповідних їм контурів. Таке взаємне розташування магнітів та шляхових струмопровідних контурів при раціональному виборі основних їх параметрів, до яких відносяться поперечні розміри шляхових контурів, соленоїдів надпровідних магнітів, а також значення намагнічувальних сил в соленоїдах, забезпечує стійкий левітаційний рух транспортного засобу вздовж шляхової структури у прямолінійних і криволінійних ділянках шляху. Поставлена задача вирішується тим, що обидва ряди надпровідних магнітів, віднесених до відповідних рядів шляхових струмопровідних контурів, формують таку їх взаємодію, при якій електродинамічні поперечні сили, які діють на кожний з магнітів від зовнішньої і внутрішньої сторони відповідного їм контура, направлені в протилежні сторони і поперечний зсув транспортного засобу визиває при раціональному виборі параметрів магнітів та контурів відновлюючі електродинамічні сили в поперечному напрямі, які стабілізують положення транспортного засобу в горизонтальній площині, бо вони направлені в протилежну сторону зсуву. Вертикальна стабілізація екіпажу в повздовжній площині досягається за, рахунок рівноваги електродинамічних сил, сил ваги та інерційних сил. Стабілізація екіпажу у вертикальній поперечній площині досягається за рахунок мінімальних значень вертикальних електродинамічних сил в стані рівноваги екіпажу а також за рахунок значення коефіцієнту стійкості від перевертання (відношення всіх утримуючих від перевертання моментів до перевертаючих моментів), більшого ніж одиниця. Необхідне значення цього коефіцієнту досягається внаслідок як рознесення в поперечному напрямку по краям транспортного засобу надпровідних магнітів і смуг струмопровідних шляхових контурів, так і внаслідок протилежно направлених моментів при поперечному зсуві транспортного засобу від відновлюючих поперечних електродинамічних сил і від вертикальних електродинамічних сил взаємодії транспортного засобу та шляхової структури. При додержанні описаних умов стабілізації транспортного засобу при вертикальних, поперечних переміщеннях та при боковому його качанні, кутові переміщення у вертикальній повздовжній та в горизонтальній площинах не визначають стійкості левітаційного руху транспортного засобу. 5 Таким чином, умовою забезпечення стабільності левітаційного руху транспортного засобу є раціональний вибір поперечних розмірів шляхових контурів та соленоїдів надпровідних магнітів, які знаходяться над відповідними їм смугами шляхових контурів, досягнення за цей рахунок мінімальних значень вертикальних електродинамічних сил в стані рівноваги та раціональний вибір значень намагнічувальних сил в соленоїдах магнітів. Ці умови реалізуються шляхом проведення розрахунків стійкості руху для різних варіантів. Для гасіння власних та вимушених коливань транспортного засобу, викликаних його недосконалостями та шляхової структури, в конструкції транспортного засобу передбачено ресорне підвішування, що включає пружно-в'язкі елементи, завдяки яким зменшується дія різних збурень та ефективно ганиться енергія коливань. Запропоноване технічне рішення досконаліше від рішення, описаного в прототипі, тому, що вартість шляхової структури системи, яка відноситься до прототипу, буде значно більшою, ніж в описаному технічному рішенні, внаслідок використання в транспортній системі прототипу чотирьох рядів струмопровідних шляхових контурів, а в запропонованій системі двох рядів контурів. За наявними в авторів відомостями, запропоновані Істотні ознаки, що характеризують сутність винаходу, не відомі в даному розділі техніки. Запропоноване технічне рішення може бути використано при розробці швидкісних транспортних засобів. На фіг. 1 приведено загальний вигляд запропонованої транспортної системи (фасад та вигляд із боку), на якій позначено: 1 - кузов, 2 ходові візки, 3 - надпровідні магніти, 4 - пружнодисипативні зв'язки, 5 - шляхова структура, 6 шляхові короткозамкнуті, чотирикутні контури. Описана система працює таким чином. При поперечних зсувах транспортного засобу в процесі його руху виникають як вертикальні (левітаційні) сили, що повертають екіпаж в рівноважне положення, яке відповідає мінімальному значенню цих сил, так і поперечні електродинамічні сили взаємодії кожного з магнітів силового вузлу А (див. фіг. 1) з відповідним їм рядом шляхових контурів 6. Ці поперечні сили кожного вузлу протилежно направлені і при раціональному виборі поперечних розмірів шляхових контурів, соленоїдів надпровідних магнітів відновлюють позиційну рівновагу. Таким чином, ми одержуємо магнітний замок за рахунок взаємодії двох рядів надпровідних магнітів кожного вузлу А з відповідним їм рядом шляхових контурів. Необхідно підкреслити, що умови стійкого руху можуть бути визначені тільки на основі результатів розрахунків для різних варіантів ширини соленоїдів магнітів та шляхових контурів. Основні ознаки, необхідні для здійснення винаходу: кузов екіпажу опирається на візки за допомогою восьми пружно-дисипативних елементів; 91569 6 на донних поверхнях візків кріпляться два ряди надпровідних магнітів, з яких кожний ряд рознесений на максимально можливу відстань у поперечному напрямку (див. фіг. 1); уздовж кожного візка магніти також розташовують попарно з максимально можливою відстанню між ними (див. фіг. 1); пружно-дисипативні елементи розташовуються вздовж візків так, щоб їх вертикальні осі проходили через середину повздовжнього зазору між двома магнітами кожної пари; повздовжні вісі кожного із двох рядів шляхових контурів повинні збігатися з проекціями на площину контурів повздовжніх вісей відповідних їм рядів магнітів, при близькому розташуванні двох магнітів однієї їх пари у повздовжньому напрямку краще з умов досягнення максимальних значень левітаційних сил череду вати напрямки струму ь соленоїдах надпровідних магнітів; повинні бути визначені раціональні з умов стабілізації руху екіпажу; поперечні розміри шляхових контурів, соленоїдів надпровідних магнітів, віднесених до відповідних рядів контурів шляхової структури. Повздовжні розміри надпровідних магнітів та шляхових контурів не мають впливу ні на підйомну силу, ні на надійність стабілізації; їх встановлюють з міркувань, пов'язаних з проблемами дисипації енергії (яка залежить від значення сили електродинамічного гальмування). Відстань між двома рядами шляхових контурів регламентується тільки однією вимогою - вони повинні бути рознесені на максимально можливу відстань з умов стійкості транспортного засобу від перекидання. Систему, що патентується, вигідно відрізняє від інших систем те, що в ній теоретично знайдені умови і можливість стабілізації руху екіпажу над плоскою шляховою структурою з двома рядами шляхових контурів. Собівартість її буде значно меншою ніж систем з шляховою структурою профільованого типу і з плоскою шляховою структурою з чотирма рядами шляхових контурів. Приклад 1. Як приклад для визначення параметрів запропонованої транспортної системи розглянемо розрахункову схему (фіг. 1), використану авторами для розробки математичної моделі левітаційного руху екіпажу вздовж прямолінійних та криволінійних ділянок шляху та для одержання результатів розрахунків, що характеризують просторові коливання та стійкість руху транспортного засобу. В математичній моделі враховані як лінійні, так і кутові (просторові) переміщення кузову й візків. Кузов екіпажу 1 опирається на два візки через пружно-дисипативні зв'язки 4. Кількість візків обумовлено принципами раціонального вибору конструктивної схеми. На нижніх площинах візків встановлені надпровідні магніти - 3, симетрично розміщені над кожною смугою шляхових контурів 6 по 8 магнітів на візок. Фізичні параметри, використані при обчисленнях, узяті без масштабування і є дійсними характеристиками повно габаритного транспортного засобу. Основні з них, що можуть впливати на 7 стабілізацію транспортного засобу мають такі значення: 1. Маса кузову -25т; 2. Маса візка з магнітами - 3,75т; 3. Коефіцієнти жорсткості та в'язкості ресор з демпферами - 200кН/м і 20кН.с/м; 4. Швидкість руху 40 - 100м/с; 5. Габарити (ширина і довжина) соленоїдів надпровідних магнітів – 0,5х1,2м та шляхових контурів 1,0х1,0м; 6. Сила намагнічення в соленоїдах магнітів 520кА. Шляхом інтегрування диференційних рівнянь, що описують рух екіпажу і зміну струмів у шляхових контурах, були знайдені основні приведені вище, параметри, що забезпечують стійкість руху транспортного засобу над плоскої шляховою структурою. Оцінка коливань та стійкості руху транспортного засобу проводилась вздовж шляхової структури, яка має окреслення в плані: прямолінійна ділянка довжиною 300м, вхідна перехідна крива спряження прямолінійної ділянки з круговою кривою довжиною 500м, кругова крива радіусом R=8000м з нахилом площини структури до горизонтальної площини в сторону центра кривизни 0,1рад та довжиною 150м, вихідна перехідна крива -400м, пряма - 250м. При обчисленні варіювалися взаємні габарити співвідношення магнітно-контурних груп. Результати інтегрування рівнянь руху екіпажу та зв'язаних з ними рівнянь, які описують значення струмів у шляхових контурах при переміщенні екіпажу приведені при швидкості руху екіпажу v=40 і v=100м/с графічними залежностями від пройденого шляху S на фіг. 2а і 2б для бічного відносу , , і, на і, на фиг. 3а і 3б для кутів бічного качання фіг. 4а і 4б лінійних переміщень підскакування z і zі, на фіг. 5а і 5б для галопування , і, на фіг. 6а і 6б кутів виляння , і ( , і = 1,2 - індекси для позначення відповідно кузову та номерів візків), Значення левітаційних зазорів під різними магнітами j (j =1,2,...,16 - номери надпровідних магнітів) змінюються в інтервалах 0,04 - 0,064м для v=40м/с і 0,155 - 0,186м для v= 100м/с. 91569 8 Від'ємні значення величин підскакування z і zі (фіг. 4) обумовлені вибором додатного напрямку координат OZ для кожного твердого тіла механічної системи, які направлені зверху вниз. Координата z обчислена від положення статичної рівноваги з урахуванням статичного прогину ресорного підвішування. Як видно з цих результатів, коливання екіпажу, обумовлені початковими збуреннями системи при S = 0, швидко згасають як на прямолінійних, так і на криволінійних ділянках шляхової структури перемінної та постійної кривизни, а екіпаж відсліджує при своєму русі напрямок траси шляхової структури. При цьому бічні відноси візків і кузову відносно продольної вісі шляхової структури в прямолінійних та криволінійних ділянках не перевищують, як видно з фіг. 2а, у сталому режимі значень відповідно рівних 0,032 і 0,078м, а кути бокового качання 0,0152 і 0,02 радіан (фіг. 3а, 3б). Практично не залежать від кривизни шляхової структури значення вертикальних переміщень візків та кузову екіпажу, що дорівнюють відповідно -0,05 і 0,11м (фіг 4а), а також кутів їх галопування та виляння. Кути виляння декілька збільшуються в криволінійних ділянках шляху. Аналогічні результати отримані також при значеннях габаритів (ширини і довжини) соленоїдів магнітів і шляхових контурів відповідно рівних 0,35 х 1,2м і 0,8х1,0м. Встановлено, що для такої розрахункової схеми можна одержати стійку систему підвісу і для інших параметрів транспортної системи погодженим та планомірним варіюванням габаритів контурів і соленоїдів надпровідних магнітів та значень намагнічувальних сил в них за допомогою розрахунків, що визначають умови стійкості руху. Стійкість руху повномасштабного екіпажу в прямолінійних та криволінійних ділянках шляхової структури свідчить, що запропонована електродинамічна система може знайти застосування в реальних технічних пристроях. Таким чином, проведені дослідження свідчать про перспективність технічної реалізації системи підвісу, що патентується. 9 91569 10 11 Комп’ютерна верстка Д. Шеверун 91569 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of electrodynamic suspension of magnetic levitating vehicle
Автори англійськоюDzenzerskyi Viktor Oleksandrovych, Kuznietsova Tetiana Ivanivna, Radchenko Mykola Oleksiiovych, Filonenko Lidia Oleksandrivna, Khachapuridze Mykola Mykhailovych
Назва патенту російськоюСистема электродинамического подвеса магнитолевитирующего транспортного средства
Автори російськоюДзензерский Виктор Александрович, Кузнецова Татьяна Ивановна, Радченко Николай Алексеевич, Филоненко Лидия Александровна, Хачапуридзе Николай Михайлович
МПК / Мітки
МПК: E01B 25/00, B60L 13/04
Мітки: система, електродинамічного, підвісу, транспортного, засобу, магнітолевітуючого
Код посилання
<a href="https://ua.patents.su/6-91569-sistema-elektrodinamichnogo-pidvisu-magnitolevituyuchogo-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Система електродинамічного підвісу магнітолевітуючого транспортного засобу</a>
Система електродинамічного підвісу левітуючого транспортного засобу
Номер патенту: 91540
Опубліковано: 10.08.2010
Автори: Радченко Микола Олексійович, Зєвін Олександр Аронович, Дзензерський Віктор Олександрович
МПК: B60L 13/04
Мітки: транспортного, левітуючого, підвісу, засобу, електродинамічного, система
Формула / Реферат:
Система електродинамічного підвісу левітуючого транспортного засобу, що містить на плоскій шляховій структурі ряди контурів та ряди надпровідних магнітів на візках транспортного засобу, яка відрізняється тим, що на плоскій шляховій структурі встановлено два згаданих ряди прямокутних короткозамкнутих контурів, максимально рознесених в поперечному напрямі, а на донних площинах візків транспортного засобу встановлені чотири ряди згаданих...
Система стабілізованого підвісу магнітолевітуючого транспортного засобу
Номер патенту: 69977
Опубліковано: 15.09.2004
Автори: Зевін Олександр Аронович, Радченко Микола Олексійович, Дзензерський Віктор Олександрович
МПК: B60L 13/04
Мітки: засобу, система, транспортного, стабілізованого, підвісу, магнітолевітуючого
Формула / Реферат:
Система стабілізованого електродинамічного підвісу магнітолевітуючого транспортного засобу, яка містить екіпаж з надпровідним силовим комплексом та шляхову структуру з закріпленими на ній в областях дії потоків магнітної індукції від вагонних магнітів контурами стабілізації та левітації, яка відрізняється тим, що всі надпровідні магніти встановлені на донних площинах ходових візків і орієнтовані полюсними гранями горизонтально, шляхова...
Пристрій для вимірювання прогинів шляхової структури магнітолевітуючого транспортного засобу
Номер патенту: 59711
Опубліковано: 15.09.2003
Автори: Плаксін Сергей Вікторович, Дзензерський Віктор Олександрович, Житник Микола Явтухович, Соколовський Іван Івановіч
МПК: G01B 7/14, B61B 13/08
Мітки: засобу, шляхової, структури, магнітолевітуючого, прогинів, вимірювання, транспортного, пристрій
Формула / Реферат:
Пристрій для вимірювання прогинів шляхової структури магнітолевітуючого транспортного засобу, що містить установлені на екіпажі постійний магніт і магніточутливий елемент, підключений до джерела живлення і розташований між постійним магнітом і шляховою структурою, який відрізняється тим, що магніточутливий елемент виконаний у вигляді магнітодіодів, з'єднаних за мостовою схемою, причому магнітодіоди орієнтовані таким чином, що напрямок...
Гальмова система транспортного засобу
Номер патенту: 64857
Опубліковано: 15.03.2004
Автори: Могила Валентин Іванович, Стецько Сергій Михайлович, Морозов Олександр Михайлович
МПК: B60T 15/60
Мітки: засобу, гальмова, транспортного, система
Формула / Реферат:
Гальмова система транспортного засобу з різними осьовими навантаженнями, що містить гальмову магістраль, повітророзподільник з запасним резервуаром, багатоканальний редуктор тиску, гальмовий циліндр, важільну гальмову передачу з гальмовими колодками, яка відрізняється тим, що вона забезпечена пристроєм контролю змін вертикальних геометричних характеристик ресорної підвіски, під'єднаним одним дротом до електричної системи транспортного засобу,...
Гальмова система транспортного засобу
Номер патенту: 52920
Опубліковано: 15.01.2003
Автори: Могила Валентин Іванович, Морозов Олександр Михайлович, Стецько Сергій Михайлович
МПК: B60T 15/60
Мітки: система, засобу, транспортного, гальмова
Формула / Реферат:
Гальмова система транспортного засобу, що містить гальмову магістраль, повітророзподільник з запасним резервуаром, гальмові циліндри, важільні гальмові передачі з гальмовими колодками, яка відрізняється тим, що вона забезпечена пристроєм контролю обертання колеса, приєднаним одним дротом до пристрою керування сигналами, а другим - до пристрою аналізу сигналів.
Попередній патент: Спосіб теплопостачання
Наступний патент: Антена зі змінною шириною променя
Випадковий патент: Пристрій для збирання метеликів