Система стабілізованого підвісу магнітолевітуючого транспортного засобу
Номер патенту: 69977
Опубліковано: 15.09.2004
Автори: Зевін Олександр Аронович, Радченко Микола Олексійович, Дзензерський Віктор Олександрович
Формула / Реферат
Система стабілізованого електродинамічного підвісу магнітолевітуючого транспортного засобу, яка містить екіпаж з надпровідним силовим комплексом та шляхову структуру з закріпленими на ній в областях дії потоків магнітної індукції від вагонних магнітів контурами стабілізації та левітації, яка відрізняється тим, що всі надпровідні магніти встановлені на донних площинах ходових візків і орієнтовані полюсними гранями горизонтально, шляхова структура має плоский обрис, а контури шляхової структури виконані плоскими і прямокутними та встановлені на ній у вигляді двох рознесених смуг, які складаються з подвійних рядів, розділених постійним зазором, причому кожна смуга розміщена під своїм надпровідним магнітом таким чином, що проекція його центра ваги на площину дорожнього полотна проходить по середній лінії зазору між рядами.
Текст
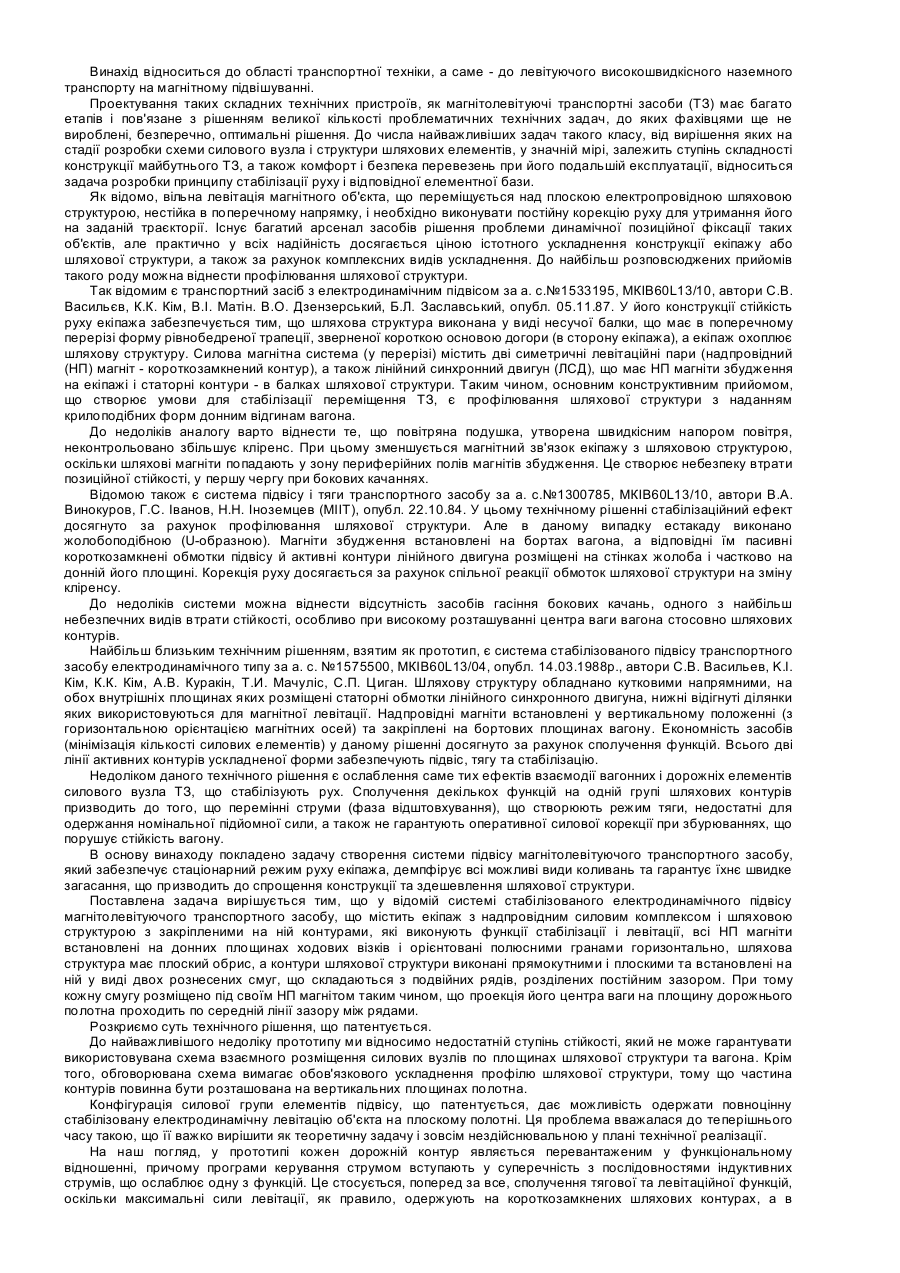
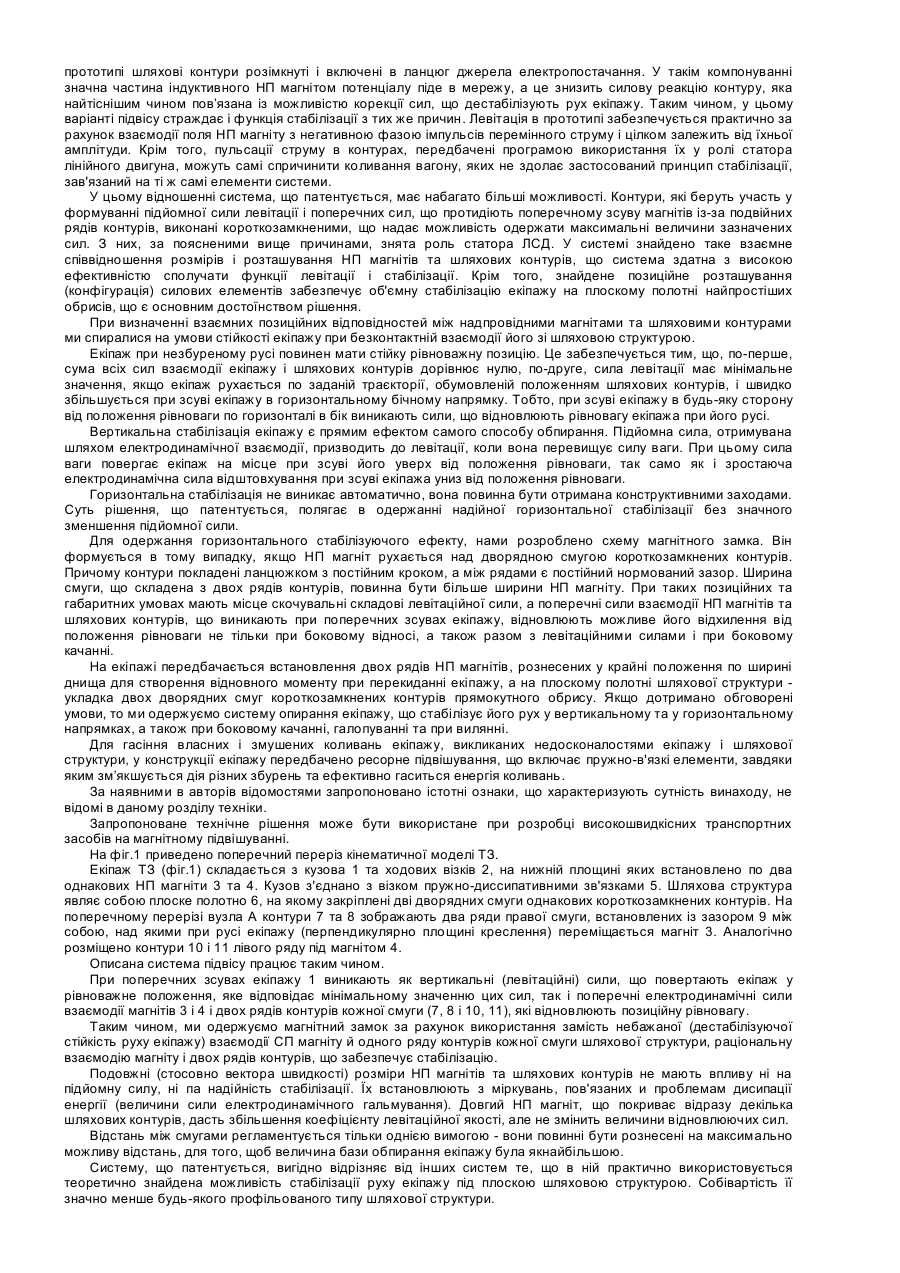
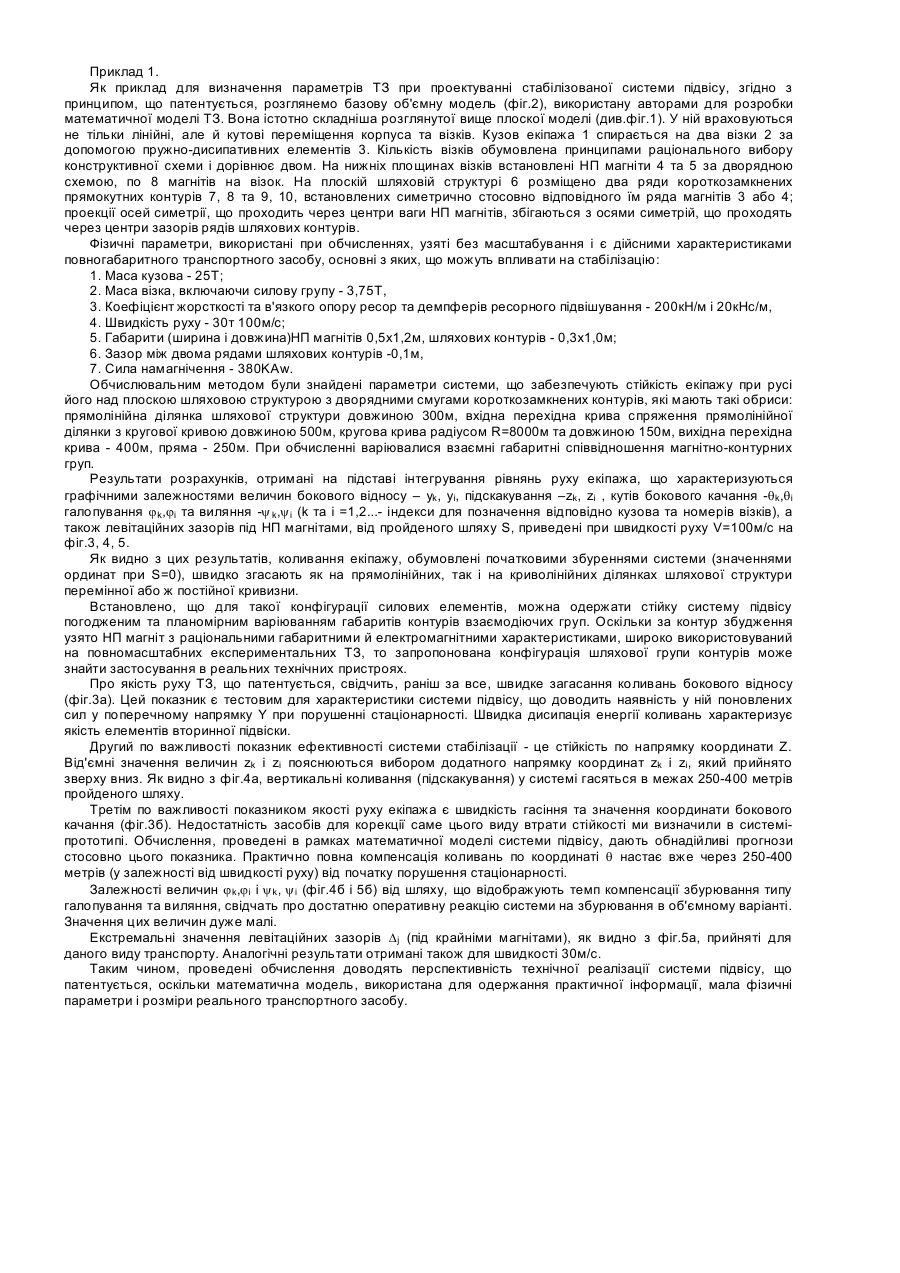
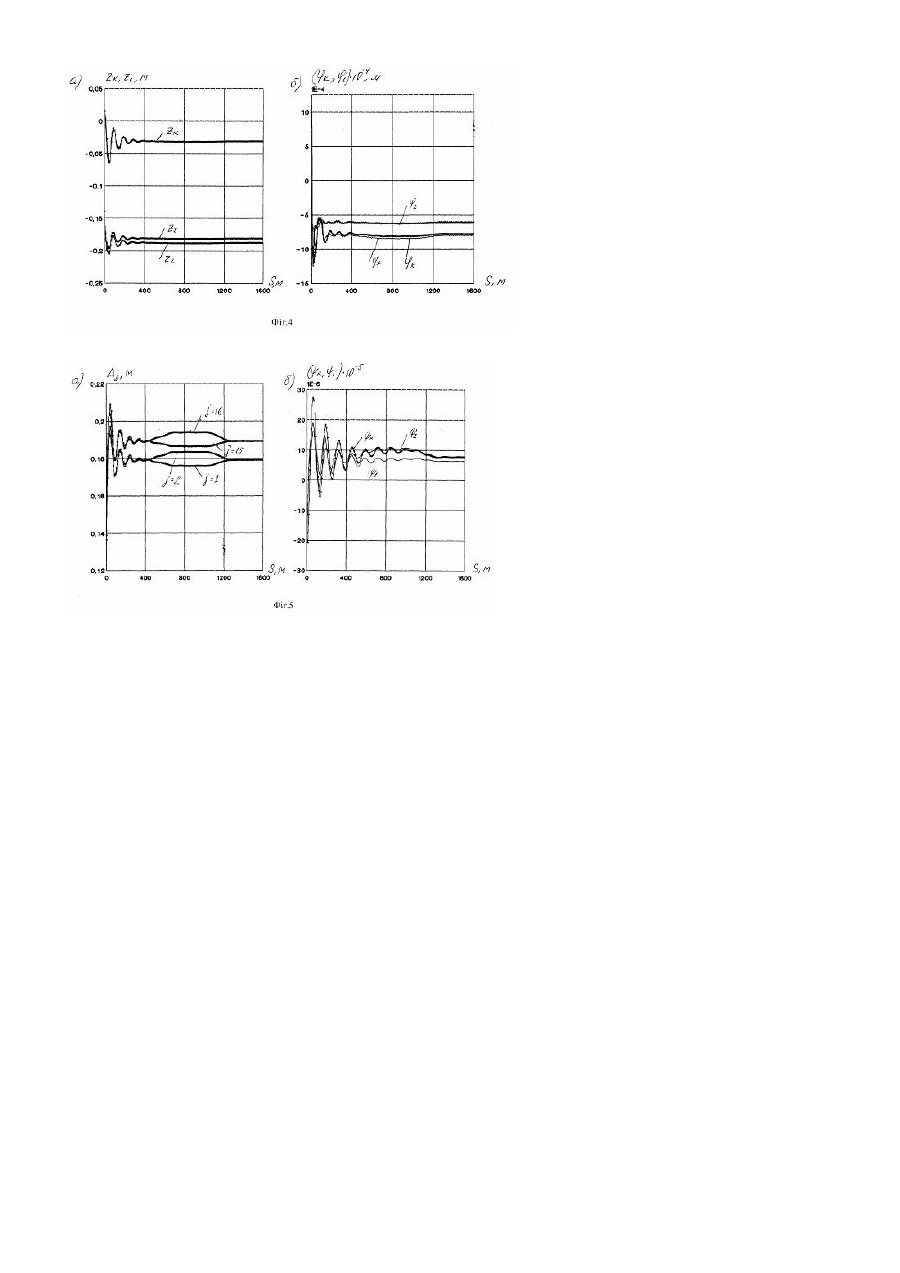
Винахід відноситься до області транспортної техніки, а саме - до левітуючого високошвидкісного наземного транспорту на магнітному підвішуванні. Проектування таких складних технічних пристроїв, як магнітолевітуючі транспортні засоби (ТЗ) має багато етапів і пов'язане з рішенням великої кількості проблематичних технічних задач, до яких фахівцями ще не вироблені, безперечно, оптимальні рішення. До числа найважливіших задач такого класу, від вирішення яких на стадії розробки схеми силового вузла і структури шляхових елементів, у значній мірі, залежить ступінь складності конструкції майбутнього ТЗ, а також комфорт і безпека перевезень при його подальшій експлуатації, відноситься задача розробки принципу стабілізації руху і відповідної елементної бази. Як відомо, вільна левітація магнітного об'єкта, що переміщується над плоскою електропровідною шляховою структурою, нестійка в поперечному напрямку, і необхідно виконувати постійну корекцію руху для утримання його на заданій траєкторії. Існує багатий арсенал засобів рішення проблеми динамічної позиційної фіксації таких об'єктів, але практично у всіх надійність досягається ціною істотного ускладнення конструкції екіпажу або шляхової структури, а також за рахунок комплексних видів ускладнення. До найбільш розповсюджених прийомів такого роду можна віднести профілювання шляхової структури. Так відомим є транспортний засіб з електродинамічним підвісом за а. с.№1533195, МКІВ60L13/10, автори С.В. Васильєв, К.К. Кім, B.I. Матін. В.О. Дзензерський, Б.Л. Заславський, опубл. 05.11.87. У його конструкції стійкість руху екіпажа забезпечується тим, що шляхова структура виконана у виді несучої балки, що має в поперечному перерізі форму рівнобедреної трапеції, зверненої короткою основою догори (в сторону екіпажа), а екіпаж охоплює шляхову структуру. Силова магнітна система (у перерізі) містить дві симетричні левітаційні пари (надпровідний (НП) магніт - короткозамкнений контур), а також лінійний синхронний двигун (ЛСД), що має НП магніти збудження на екіпажі і статорні контури - в балках шляхової структури. Таким чином, основним конструктивним прийомом, що створює умови для стабілізації переміщення ТЗ, є профілювання шляхової структури з наданням крилоподібних форм донним відгинам вагона. До недоліків аналогу варто віднести те, що повітряна подушка, утворена швидкісним напором повітря, неконтрольовано збільшує кліренс. При цьому зменшується магнітний зв'язок екіпажу з шляховою структурою, оскільки шляхові магніти попадають у зону периферійних полів магнітів збудження. Це створює небезпеку втрати позиційної стійкості, у першу чергу при бокових качаннях. Відомою також є система підвісу і тяги транспортного засобу за а. с.№1300785, МКІВ60L13/10, автори В.А. Винокуров, Г.С. Іванов, Н.Н. Іноземцев (МІІТ), опубл. 22.10.84. У цьому технічному рішенні стабілізаційний ефект досягнуто за рахунок профілювання шляхової структури. Але в даному випадку естакаду виконано жолобоподібною (U-образною). Магніти збудження встановлені на бортах вагона, а відповідні їм пасивні короткозамкнені обмотки підвісу й активні контури лінійного двигуна розміщені на стінках жолоба і частково на донній його площині. Корекція руху досягається за рахунок спільної реакції обмоток шляхової структури на зміну кліренсу. До недоліків системи можна віднести відсутність засобів гасіння бокових качань, одного з найбільш небезпечних видів втрати стійкості, особливо при високому розташуванні центра ваги вагона стосовно шляхових контурів. Найбільш близьким технічним рішенням, взятим як прототип, є система стабілізованого підвісу транспортного засобу електродинамічного типу за а. с. №1575500, МКІВ60L13/04, опубл. 14.03.1988р., автори С.В. Васильев, K.I. Кім, К.К. Кім, А.В. Куракін, Т.И. Мачуліс, С.П. Циган. Шляхову структуру обладнано кутковими напрямними, на обох внутрішніх площинах яких розміщені статорні обмотки лінійного синхронного двигуна, нижні відігнуті ділянки яких використовуються для магнітної левітації. Надпровідні магніти встановлені у вертикальному положенні (з горизонтальною орієнтацією магнітних осей) та закріплені на бортових площинах вагону. Економність засобів (мінімізація кількості силових елементів) у даному рішенні досягнуто за рахунок сполучення функцій. Всього дві лінії активних контурів ускладненої форми забезпечують підвіс, тягу та стабілізацію. Недоліком даного технічного рішення є ослаблення саме тих ефектів взаємодії вагонних і дорожніх елементів силового вузла ТЗ, що стабілізують рух. Сполучення декількох функцій на одній групі шляхових контурів призводить до того, що перемінні струми (фаза відштовхування), що створюють режим тяги, недостатні для одержання номінальної підйомної сили, а також не гарантують оперативної силової корекції при збурюваннях, що порушує стійкість вагону. В основу винаходу покладено задачу створення системи підвісу магнітолевітуючого транспортного засобу, який забезпечує стаціонарний режим руху екіпажа, демпфірує всі можливі види коливань та гарантує їхнє швидке загасання, що призводить до спрощення конструкції та здешевлення шляхової структури. Поставлена задача вирішується тим, що у відомій системі стабілізованого електродинамічного підвісу магнітолевітуючого транспортного засобу, що містить екіпаж з надпровідним силовим комплексом і шляховою структурою з закріпленими на ній контурами, які виконують функції стабілізації і левітації, всі НП магніти встановлені на донних площинах ходових візків і орієнтовані полюсними гранами горизонтально, шляхова структура має плоский обрис, а контури шляхової структури виконані прямокутними і плоскими та встановлені на ній у виді двох рознесених смуг, що складаються з подвійних рядів, розділених постійним зазором. При тому кожну смугу розміщено під своїм НП магнітом таким чином, що проекція його центра ваги на площину дорожнього полотна проходить по середній лінії зазору між рядами. Розкриємо суть технічного рішення, що патентується. До найважливішого недоліку прототипу ми відносимо недостатній ступінь стійкості, який не може гарантувати використовувана схема взаємного розміщення силових вузлів по площинах шляхової структури та вагона. Крім того, обговорювана схема вимагає обов'язкового ускладнення профілю шляхової структури, тому що частина контурів повинна бути розташована на вертикальних площинах полотна. Конфігурація силової групи елементів підвісу, що патентується, дає можливість одержати повноцінну стабілізовану електродинамічну левітацію об'єкта на плоскому полотні. Ця проблема вважалася до теперішнього часу такою, що її важко вирішити як теоретичну задачу і зовсім нездійснювальною у плані технічної реалізації. На наш погляд, у прототипі кожен дорожній контур являється перевантаженим у функціональному відношенні, причому програми керування струмом вступають у суперечність з послідовностями індуктивних струмів, що ослаблює одну з функцій. Це стосується, поперед за все, сполучення тягової та левітаційної функцій, оскільки максимальні сили левітації, як правило, одержують на короткозамкнених шляхових контурах, а в прототипі шляхові контури розімкнуті і включені в ланцюг джерела електропостачання. У такім компонуванні значна частина індуктивного НП магнітом потенціалу піде в мережу, а це знизить силову реакцію контуру, яка найтіснішим чином пов’язана із можливістю корекції сил, що дестабілізують рух екіпажу. Таким чином, у цьому варіанті підвісу страждає і функція стабілізації з тих же причин. Левітація в прототипі забезпечується практично за рахунок взаємодії поля НП магніту з негативною фазою імпульсів перемінного струму і цілком залежить від їхньої амплітуди. Крім того, пульсації струму в контурах, передбачені програмою використання їх у ролі статора лінійного двигуна, можуть самі спричинити коливання вагону, яких не здолає застосований принцип стабілізації, зав'язаний на ті ж самі елементи системи. У цьому відношенні система, що патентується, має набагато більші можливості. Контури, які беруть участь у формуванні підйомної сили левітації і поперечних сил, що протидіють поперечному зсуву магнітів із-за подвійних рядів контурів, виконані короткозамкненими, що надає можливість одержати максимальні величини зазначених сил. З них, за поясненими вище причинами, знята роль статора ЛСД. У системі знайдено таке взаємне співвідношення розмірів і розташування НП магнітів та шляхових контурів, що система здатна з високою ефективністю сполучати функції левітації і стабілізації. Крім того, знайдене позиційне розташування (конфігурація) силових елементів забезпечує об'ємну стабілізацію екіпажу на плоскому полотні найпростіших обрисів, що є основним достоїнством рішення. При визначенні взаємних позиційних відповідностей між надпровідними магнітами та шляховими контурами ми спиралися на умови стійкості екіпажу при безконтактній взаємодії його зі шляховою структурою. Екіпаж при незбуреному русі повинен мати стійку рівноважну позицію. Це забезпечується тим, що, по-перше, сума всіх сил взаємодії екіпажу і шляхових контурів дорівнює нулю, по-друге, сила левітації має мінімальне значення, якщо екіпаж рухається по заданій траєкторії, обумовленій положенням шляхових контурів, і швидко збільшується при зсуві екіпажу в горизонтальному бічному напрямку. Тобто, при зсуві екіпажу в будь-яку сторону від положення рівноваги по горизонталі в бік виникають сили, що відновлюють рівновагу екіпажа при його русі. Вертикальна стабілізація екіпажу є прямим ефектом самого способу обпирання. Підйомна сила, отримувана шляхом електродинамічної взаємодії, призводить до левітації, коли вона перевищує силу ваги. При цьому сила ваги повергає екіпаж на місце при зсуві його уверх від положення рівноваги, так само як і зростаюча електродинамічна сила відштовхування при зсуві екіпажа униз від положення рівноваги. Горизонтальна стабілізація не виникає автоматично, вона повинна бути отримана конструктивними заходами. Суть рішення, що патентується, полягає в одержанні надійної горизонтальної стабілізації без значного зменшення підйомної сили. Для одержання горизонтального стабілізуючого ефекту, нами розроблено схему магнітного замка. Він формується в тому випадку, якщо НП магніт рухається над дворядною смугою короткозамкнених контурів. Причому контури покладені ланцюжком з постійним кроком, а між рядами є постійний нормований зазор. Ширина смуги, що складена з двох рядів контурів, повинна бути більше ширини НП магніту. При таких позиційних та габаритних умовах мають місце скочувальні складові левітаційної сили, а поперечні сили взаємодії НП магнітів та шляхових контурів, що виникають при поперечних зсувах екіпажу, відновлюють можливе його відхилення від положення рівноваги не тільки при боковому відносі, а також разом з левітаційними силами і при боковому качанні. На екіпажі передбачається встановлення двох рядів НП магнітів, рознесених у крайні положення по ширині днища для створення відновного моменту при перекиданні екіпажу, а на плоскому полотні шляхової структури укладка двох дворядних смуг короткозамкнених контурів прямокутного обрису. Якщо дотримано обговорені умови, то ми одержуємо систему опирання екіпажу, що стабілізує його рух у вертикальному та у горизонтальному напрямках, а також при боковому качанні, галопуванні та при вилянні. Для гасіння власних і змушених коливань екіпажу, викликаних недосконалостями екіпажу і шляхової структури, у конструкції екіпажу передбачено ресорне підвішування, що включає пружно-в'язкі елементи, завдяки яким зм’якшується дія різних збурень та ефективно гаситься енергія коливань. За наявними в авторів відомостями запропоновано істотні ознаки, що характеризують сутність винаходу, не відомі в даному розділу техніки. Запропоноване технічне рішення може бути використане при розробці високошвидкісних транспортних засобів на магнітному підвішуванні. На фіг.1 приведено поперечний переріз кінематичної моделі ТЗ. Екіпаж ТЗ (фіг.1) складається з кузова 1 та ходових візків 2, на нижній площині яких встановлено по два однакових НП магніти 3 та 4. Кузов з'єднано з візком пружно-диссипативними зв'язками 5. Шляхова структура являє собою плоске полотно 6, на якому закріплені дві дворядних смуги однакових короткозамкнених контурів. На поперечному перерізі вузла А контури 7 та 8 зображають два ряди правої смуги, встановлених із зазором 9 між собою, над якими при русі екіпажу (перпендикулярно площині креслення) переміщається магніт 3. Аналогічно розміщено контури 10 і 11 лівого ряду під магнітом 4. Описана система підвісу працює таким чином. При поперечних зсувах екіпажу 1 виникають як вертикальні (левітаційні) сили, що повертають екіпаж у рівноважне положення, яке відповідає мінімальному значенню цих сил, так і поперечні електродинамічні сили взаємодії магнітів 3 і 4 і двох рядів контурів кожної смуги (7, 8 і 10, 11), які відновлюють позиційну рівновагу. Таким чином, ми одержуємо магнітний замок за рахунок використання замість небажаної (дестабілізуючої стійкість руху екіпажу) взаємодії СП магніту й одного ряду контурів кожної смуги шляхової структури, раціональну взаємодію магніту і двох рядів контурів, що забезпечує стабілізацію. Подовжні (стосовно вектора швидкості) розміри НП магнітів та шляхових контурів не мають впливу ні на підйомну силу, ні па надійність стабілізації. Їх встановлюють з міркувань, пов'язаних и проблемам дисипації енергії (величини сили електродинамічного гальмування). Довгий НП магніт, що покриває відразу декілька шляхових контурів, дасть збільшення коефіцієнту левітаційної якості, але не змінить величини відновлюючих сил. Відстань між смугами регламентується тільки однією вимогою - вони повинні бути рознесені на максимально можливу відстань, для того, щоб величина бази обпирання екіпажу була якнайбільшою. Систему, що патентується, вигідно відрізняє від інших систем те, що в ній практично використовується теоретично знайдена можливість стабілізації руху екіпажу під плоскою шляховою структурою. Собівартість її значно менше будь-якого профільованого типу шляхової структури. Приклад 1. Як приклад для визначення параметрів ТЗ при проектуванні стабілізованої системи підвісу, згідно з принципом, що патентується, розглянемо базову об'ємну модель (фіг.2), використану авторами для розробки математичної моделі ТЗ. Вона істотно складніша розглянутої вище плоскої моделі (див.фіг.1). У ній враховуються не тільки лінійні, але й кутові переміщення корпуса та візків. Кузов екіпажа 1 спирається на два візки 2 за допомогою пружно-дисипативних елементів 3. Кількість візків обумовлена принципами раціонального вибору конструктивної схеми і дорівнює двом. На нижніх площинах візків встановлені НП магніти 4 та 5 за дворядною схемою, по 8 магнітів на візок. На плоскій шляховій структурі 6 розміщено два ряди короткозамкнених прямокутних контурів 7, 8 та 9, 10, встановлених симетрично стосовно відповідного їм ряда магнітів 3 або 4; проекції осей симетрії, що проходить через центри ваги НП магнітів, збігаються з осями симетрій, що проходять через центри зазорів рядів шляхових контурів. Фізичні параметри, використані при обчисленнях, узяті без масштабування і є дійсними характеристиками повногабаритного транспортного засобу, основні з яких, що можуть впливати на стабілізацію: 1. Маса кузова - 25Т; 2. Маса візка, включаючи силову групу - 3,75Т, 3. Коефіцієнт жорсткості та в'язкого опору ресор та демпферів ресорного підвішування - 200кН/м і 20кНс/м, 4. Швидкість руху - 30т 100м/с; 5. Габарити (ширина і довжина)НП магнітів 0,5х1,2м, шляхових контурів - 0,3х1,0м; 6. Зазор між двома рядами шляхових контурів -0,1м, 7. Сила намагнічення - 380KAw. Обчислювальним методом були знайдені параметри системи, що забезпечують стійкість екіпажу при русі його над плоскою шляховою структурою з дворядними смугами короткозамкнених контурів, які мають такі обриси: прямолінійна ділянка шляхової структури довжиною 300м, вхідна перехідна крива спряження прямолінійної ділянки з кругової кривою довжиною 500м, кругова крива радіусом R=8000м та довжиною 150м, вихідна перехідна крива - 400м, пряма - 250м. При обчисленні варіювалися взаємні габаритні співвідношення магнітно-контурних груп. Результати розрахунків, отримані на підставі інтегрування рівнянь руху екіпажа, що характеризуються графічними залежностями величин бокового відносу – уk, уі, підскакування –zk, zі , кутів бокового качання -qk,qі галопування jk,jі та виляння -y k,y і (k та і =1,2...- індекси для позначення відповідно кузова та номерів візків), а також левітаційних зазорів під НП магнітами, від пройденого шляху S, приведені при швидкості руху V=100м/с на фіг.3, 4, 5. Як видно з цих результатів, коливання екіпажу, обумовлені початковими збуреннями системи (значеннями ординат при S=0), швидко згасають як на прямолінійних, так і на криволінійних ділянках шляхової структури перемінної або ж постійної кривизни. Встановлено, що для такої конфігурації силових елементів, можна одержати стійку систему підвісу погодженим та планомірним варіюванням габаритів контурів взаємодіючих груп. Оскільки за контур збудження узято НП магніт з раціональними габаритними й електромагнітними характеристиками, широко використовуваний на повномасштабних експериментальних ТЗ, то запропонована конфігурація шляхової групи контурів може знайти застосування в реальних технічних пристроях. Про якість руху ТЗ, що патентується, свідчить, раніш за все, швидке загасання коливань бокового відносу (фіг.3а). Цей показник є тестовим для характеристики системи підвісу, що доводить наявність у ній поновлених сил у поперечному напрямку Y при порушенні стаціонарності. Швидка дисипація енергії коливань характеризує якість елементів вторинної підвіски. Другий по важливості показник ефективності системи стабілізації - це стійкість по напрямку координати Z. Від'ємні значення величин zk і zі пояснюються вибором додатного напрямку координат zk і zі, який прийнято зверху вниз. Як видно з фіг.4а, вертикальні коливання (підскакування) у системі гасяться в межах 250-400 метрів пройденого шляху. Третім по важливості показником якості руху екіпажа є швидкість гасіння та значення координати бокового качання (фіг.3б). Недостатність засобів для корекції саме цього виду втрати стійкості ми визначили в системіпрототипі. Обчислення, проведені в рамках математичної моделі системи підвісу, дають обнадійливі прогнози стосовно цього показника. Практично повна компенсація коливань по координаті q настає вже через 250-400 метрів (у залежності від швидкості руху) від початку порушення стаціонарності. Залежності величин jk,jі і y k, y і (фіг.4б і 5б) від шляху, що відображують темп компенсації збурювання типу галопування та виляння, свідчать про достатню оперативну реакцію системи на збурювання в об'ємному варіанті. Значення цих величин дуже малі. Екстремальні значення левітаційних зазорів Dj (під крайніми магнітами), як видно з фіг.5а, прийняті для даного виду транспорту. Аналогічні результати отримані також для швидкості 30м/с. Таким чином, проведені обчислення доводять перспективність технічної реалізації системи підвісу, що патентується, оскільки математична модель, використана для одержання практичної інформації, мала фізичні параметри і розміри реального транспортного засобу.
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of stabilized suspension of magnetic levitation vehicle
Автори англійськоюDzenzerskyi Viktor Oleksandrovych, Radchenko Mykola Oleksiiovych
Назва патенту російськоюСистема стабилизированного подвеса магнитолевитирующего транспортного средства
Автори російськоюДзензерський Виктор Александрович, Дзензерский Виктор Александрович, Радченко Николай Алексеевич
МПК / Мітки
МПК: B60L 13/04
Мітки: система, підвісу, транспортного, засобу, магнітолевітуючого, стабілізованого
Код посилання
<a href="https://ua.patents.su/5-69977-sistema-stabilizovanogo-pidvisu-magnitolevituyuchogo-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Система стабілізованого підвісу магнітолевітуючого транспортного засобу</a>
Пристрій для вимірювання прогинів шляхової структури магнітолевітуючого транспортного засобу
Номер патенту: 59711
Опубліковано: 15.09.2003
Автори: Дзензерський Віктор Олександрович, Соколовський Іван Івановіч, Житник Микола Явтухович, Плаксін Сергей Вікторович
МПК: G01B 7/14, B61B 13/08
Мітки: шляхової, транспортного, структури, магнітолевітуючого, прогинів, вимірювання, засобу, пристрій
Формула / Реферат:
Пристрій для вимірювання прогинів шляхової структури магнітолевітуючого транспортного засобу, що містить установлені на екіпажі постійний магніт і магніточутливий елемент, підключений до джерела живлення і розташований між постійним магнітом і шляховою структурою, який відрізняється тим, що магніточутливий елемент виконаний у вигляді магнітодіодів, з'єднаних за мостовою схемою, причому магнітодіоди орієнтовані таким чином, що напрямок...
Гідравлічна система транспортного засобу
Номер патенту: 10664
Опубліковано: 25.12.1996
Автори: Восковец Сергій Валентинович, Войчак Григорій Васильович, Подригало Михайло Абович, Чайковський Валерій Станіславович, Заграновський Ілля Васильович
МПК: B60T 13/10
Мітки: система, транспортного, засобу, гідравлічна
Формула / Реферат:
Гідравлічна система транспортного засобу складається із гальмівного крану, в корпусі якого встановлений керований гальмівною педаллю золотник, на кінці якого виконані осьовий і радіальні канали, а з зовні два кільцевих бурта, які утворили кільцевий простір, між якими встановлено підпружинене ущільнююче кільце, і який через робочу гальмівну порожнину, з зворотньою пружиною в корпусі крану, і гідролінію з'єднаний з робочими гальмівними...
Гальмова система транспортного засобу

Номер патенту: 53013
Опубліковано: 15.01.2003
Автори: Могила Валентин Іванович, Морозов Олександр Михайлович, Стецько Сергій Михайлович
МПК: B60T 15/60
Мітки: гальмова, засобу, транспортного, система
Формула / Реферат:
Гальмова система транспортного засобу, що містить гальмову магістраль, повітророзподільник із запасним резервуаром, гальмовий циліндр, гальмові колодки, яка відрізняється тим, що система забезпечена кутовим редуктором, розміщеним між гальмовим циліндром та гальмовою колодкою.
Гальмова система транспортного засобу
Номер патенту: 52920
Опубліковано: 15.01.2003
Автори: Морозов Олександр Михайлович, Стецько Сергій Михайлович, Могила Валентин Іванович
МПК: B60T 15/60
Мітки: засобу, система, транспортного, гальмова
Формула / Реферат:
Гальмова система транспортного засобу, що містить гальмову магістраль, повітророзподільник з запасним резервуаром, гальмові циліндри, важільні гальмові передачі з гальмовими колодками, яка відрізняється тим, що вона забезпечена пристроєм контролю обертання колеса, приєднаним одним дротом до пристрою керування сигналами, а другим - до пристрою аналізу сигналів.
Гальмова система транспортного засобу
Номер патенту: 53018
Опубліковано: 15.01.2003
Автори: Могила Валентин Іванович, Стецько Сергій Михайлович, Морозов Олександр Михайлович
МПК: B60T 15/00
Мітки: засобу, гальмова, транспортного, система
Формула / Реферат:
Гальмова система транспортного засобу, що містить гальмову магістраль, повітророзподільник із запасним резервуаром, гальмові циліндри, важільні гальмові передачі з гальмовими колодками, яка відрізняється тим, що вона забезпечена пристроєм перерозподілу тиску повітря між різнонавантаженими колісними парами, під’єднаним механічно до букси транспортного засобу, а пневматично – вхідними магістралями до повітророзподільника, а вихідними – до...
Попередній патент: Сатуратор для цукрового виробництва
Наступний патент: Спосіб одержання гідроксиду міді (іі)
Випадковий патент: Полімерна основа з нанесеним на неї клейким матеріалом з низькою липкістю