Регулятор з використанням теплової енергії
Номер патенту: 9223
Опубліковано: 30.09.1996
Автори: Бовділова Алла Віталіївна, Єрошенко Валентін Андрійович
Формула / Реферат
Регулятор с использованием тепловой энергии, содержащий исполнительный механизм интегрального действия, измеритель регулируемой величины, блок сравнения и регулирующий орган, отличающийся тем, что, с целью повышения надежности и точности регулятора, в нем блок сравнения выполнен из двух одинаковых заполненных газом полостей, прилегающих одна к другой и выполненных в виде параллелепипедов, боковые поверхности которых покрыты теплоизоляцией, и кондуктора, выполненного из теплопроводного материала, установленного между тепловой шиной и торцами параллелепипедов, установленных с возможностью вертикального перемещения относительно тепловой шины, теплоизолированной от окружающей среды, кондуктор с помощью тепло-изолированного стержня связан с выходом измерителя регулируемой величины, а исполнительный механизм интегрального действия выполнен в виде сильфонного осциллятора и состоит из цилиндра, наружная боковая поверхность которого снабжена ребрами, а полость, образованная внутренней боковой поверхностью цилиндра и закрепленного на цилиндре сильфона, частично заполнена жидкостью, в которой частично размещен с возможностью перемещения стержень, соединенный с тепловой шиной, причем боковая поверхность. стержня теплоизолирована, на подвижном торце сильфона со стороны внутренней полости закреплена теплопроводная вставка, а с внешней стороны - гибкий шток, причем сильфон подпружинен относительно цилиндра, гибкий шток снабжен собачкой, установленной с возможностью поочередного контакта с одним из храповых колес, связанных через шестерни с выходным валом, связанным с регулирующим органом, причем гибкий шток размещен между двумя оппозитно расположенными сильфонами, полости которых капиллярами связаны с полостями параллелепипедов.
Текст
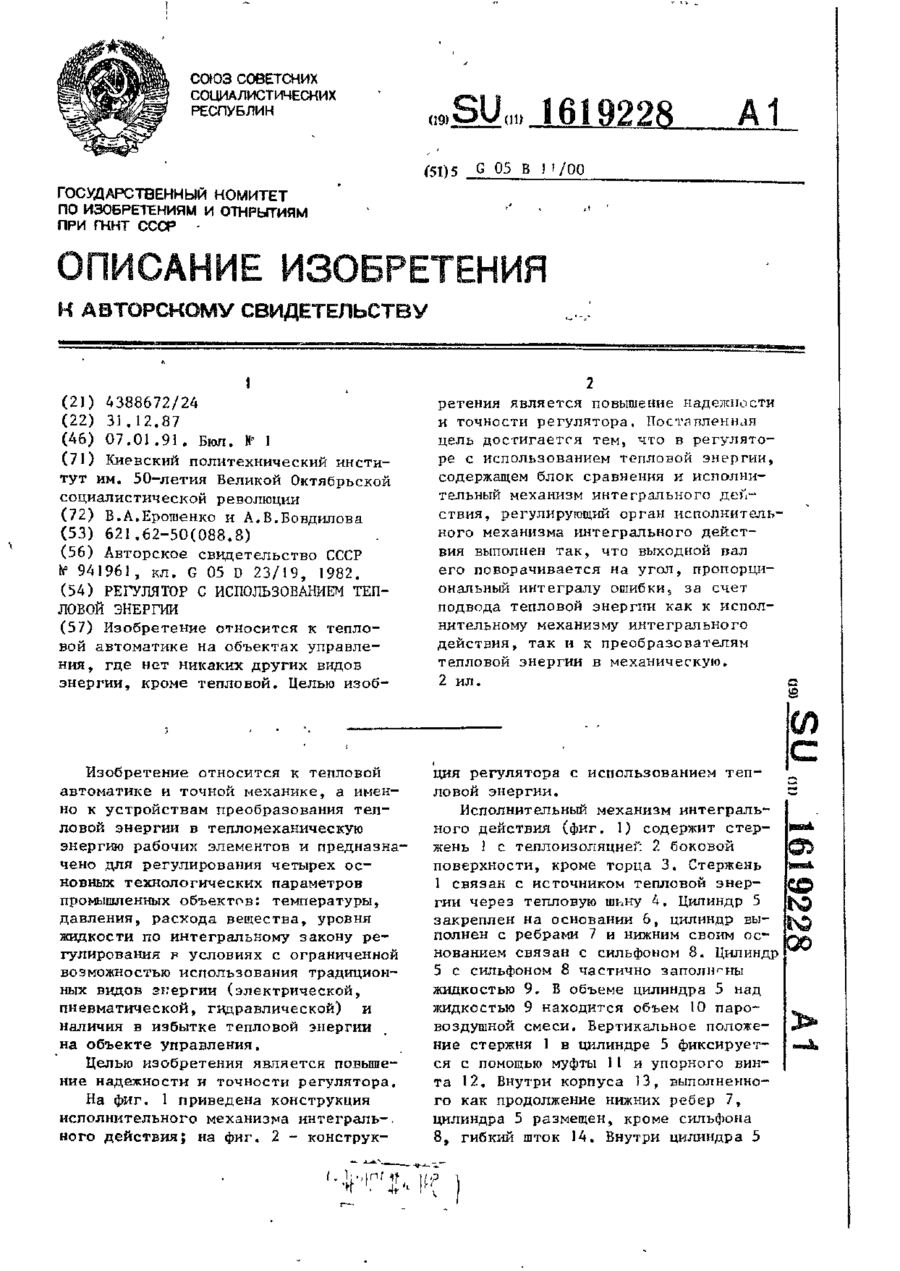
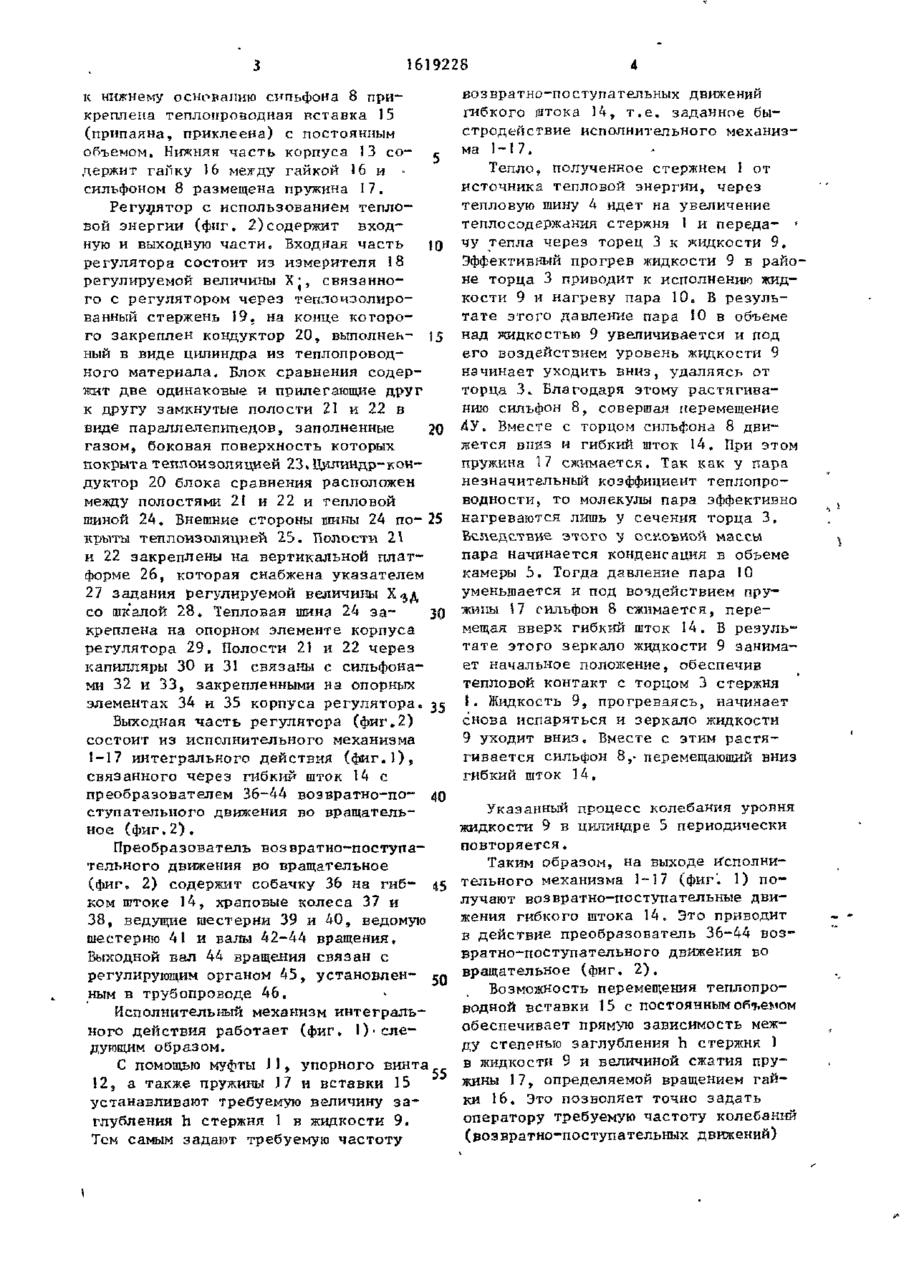
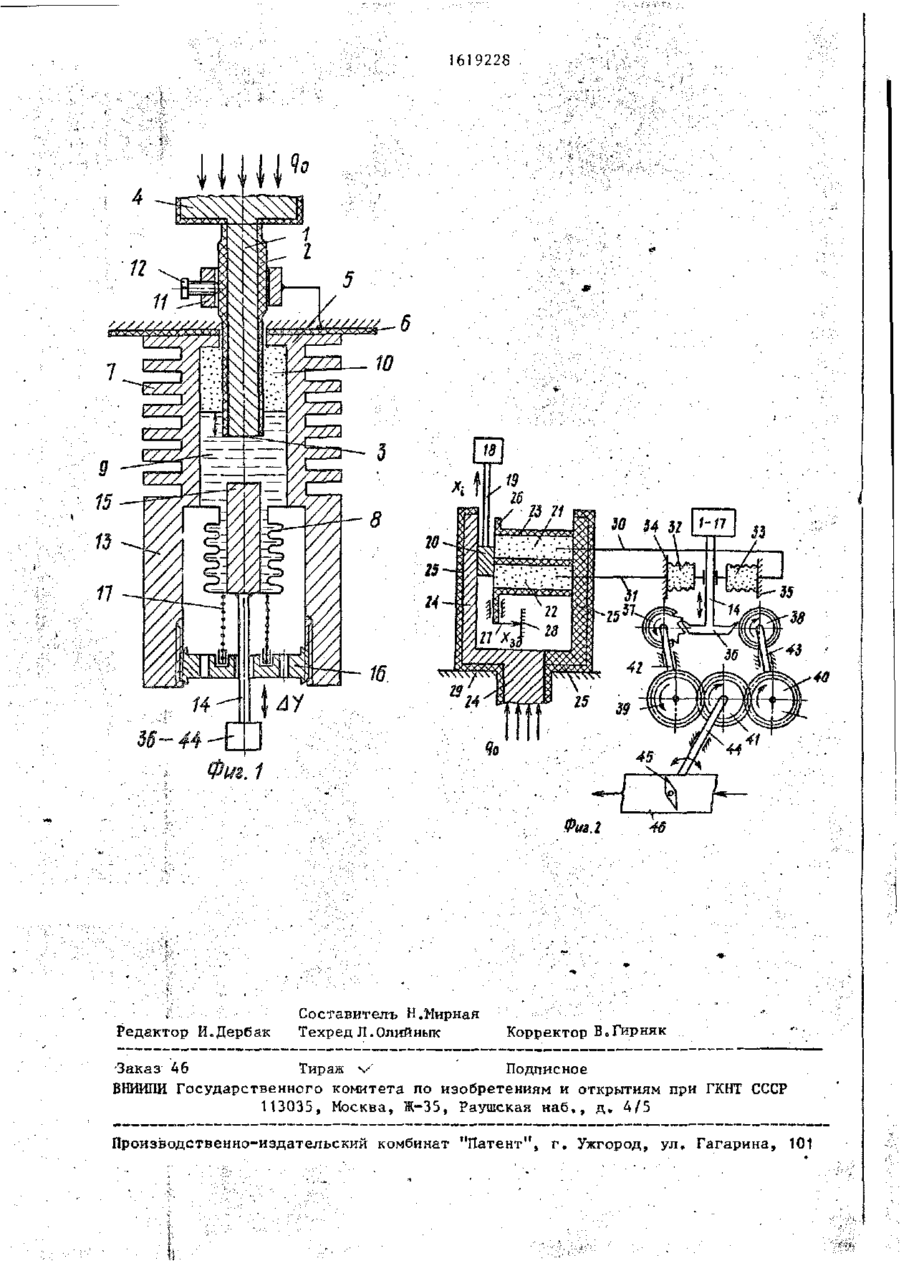
СОЮЗ СОВЕТСНИХ СОЦИАЛИСТИЧЕСКИХ РЕСПУБЛИК (51)5 G 0 5 В ) I/0Q ГОСУДАРСТВЕННЫЙ НОМИТЕТ ПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯМ ПРИ ГННТ СССР 1 (21) 4388672/24 (22) 31.12.87 (46) 07.01.91. Бюл. К 1 (71) Киевский политехнический институт им. 50-летия Великой Октябрьской социалистической революции (72) В.А.Ерошенко и А.В.Бовдилова (53) 621.62-50(088.8) (56) Авторское свидетельство СССР Ь 941961, кл. G 05 D 23/19, 1982. ° (54) РЕГУЛЯТОР С ИСПОЛЬЗОВАНИЕМ ТЕПЛОВОЙ ЭНЕРГИИ (5 7) Изобретение относится к тепловой автоматике на объектах управления, где нет никаких других видов энергии, кроме тепловой. Целью изоб йзобретение относится к тепловой автоматике и точной механике, а именно к устройствам преобразования тепловой энергии в тепломеханическую энергию рабочих элементов и предназначено для регулирования четырех основных технологических параметров промышленных объектов: температуры, давления, расхода вещества, уровня жидкости по интегральному закону регулирования р условиях с ограниченной возможностью использования традиционных видов энергии (электрической, пневматической, гидравлической) и наличия в избытке тепловой энергии на объекте управления. Целью изобретения является повышение надежности и точности регулятора. На фиг. 1 приведена конструкция исполнительного механизма интеграль-. ного действия; на фиг. 2 - конструк ретения является повышение надежности и точности регулятора. Поставленная цель достигается тем, что в регуляторе с использованием тепловой энергии, содержащем блок сравнения и исполнительный механизм интегрального действия, регулирующий орган исполнительного механизма интегрального действия выполнен так, что выходной пал его поворачивается на угол, пропорциональный интегралу ошибкиs за счет подвода тепловой энергии как к исполнительному механизму интегрального действия, так и к преобразователям тепловой энергии в механическую, 2 ил. ция регулятора с использованием тепловой энергии. Исполнительный механизм интегрального действия (фиг. 1) содержит стержень 1 с теплоизоляцией 2 боковой поверхности, кроме торца 3. Стержень 1 связан с источником тепловой энергии через тепловую шьну 4. Цилиндр 5 закреплен на основании 6, цилиндр выполнен с ребрами 7 и нижним своим основанием связан с сильфоном 8. Цилиндр 5 с сильфоном 8 частично заполнены жидкостью 9, В объеме цилиндра 5 над жидкостью 9 находится объем 10 паровоздушной смеси. Вертикальное положение стержня 1 в цилиндре 5 фиксируется с помощью муфты 11 и упорного винта 12. Внутри корпуса 13, выполненного как продолжение нижних ребер 7, цилиндра 5 размещен, кроме сильфона 8, гибкий шток 14, Внутри цилиндра 5 1619228 к нижнему основанию сипьфона 8 прикреплена теплоирозодная вставка 15 (припаяна, приклеена) с постоянным объемом. Нижняя часть корпуса 13 со- с держит ганку 16 между гайкой 16 и силъфоиом 8 размещена пружина 17. Регулятор с использованием тепловой энергии (фиг. 2)содержит входную и выходную части. Входная часть \Q регулятора состоит из измерителя 18 регулируемой величины Х', связанного с регулятором через теплоизолированный стержень 19, на конце которого закреплен кондуктор 20, выполнен.- 15 ный в виде цилиндра из теплопроводного материала. Блок сравнения содержит две одинаковые и прилегающие друг к другу замкнутые полости 21 и 22 в виде параллелепипедов, заполненные 20 газом, боковая поверхность которых покрыта теплоизоляцией 23. Цклиндр-кондуктор 20 блока сравнения расположен между полостями 21 и 22 и тепловой шиной 24. Внешние стороны шины 24 по-25 крыты теплоизоляцией 25. Полости 21 и 22 закреплены на вертикальной платформе 26, которая снабжена указателем 27 задания регулируемой величины Х^д со шкалой 28» Тепловая шина 24 за30 креплена на опорном элементе корпуса регулятора 29. Полости 21 и 22 через капилляры 30 и 31 связаны с сильфонами 32 и 33, закрепленными на опорных элементах 34 и 35 корпуса регулятора. 35 Выходная часть регулятора (фиг.2) состоит из исполнительного механизма 1-17 интегрального действия (фиг.1), связанного через гибкий шток 14 с преобразователем 36-44 возвратно-по- 40 ступательного движения во вращательное ( ф и г . 2 ) . Преобразователь возвратно-поступательного движения во вращательное (фиг, 2) содержит собачку 36 на гиб- 45 ком штоке 14, храповые колеса 37 и 38, ведущие шестерни 39 и ДО, ведомую шестерню 41 и валы 42-44 вращения. Выходной вал 44 вращения связан с регулирующим органом 45, установлен- JQ ным в трубопроводе 46. Исполнительный механизм интегрального действия работает (фиг* О 1 с л е дующим образом. С помощью муфты J 1 , упорного винта 55 12, а также пружины 17 и вставки 15 устанавливают требуемую величину заглубления h стержня 1 в жидкости 9. Тем самым задают требуемую частоту возвратно-поступательных движении гибкого штока 14, т.е. заданное быстродействие исполнительного механизма 1-17. Тепло, полученное стержнем I от источника тепловой энергии, через тепловую шину 4 идет на увеличение теплосодержания стержня 1 и переда- * чу тепла через торец 3 к жидкости 9. Эффективный прогрев жидкости 9 в районе торца 3 приводит к исполнению жидкости 9 и нагреву пара 10. В результате этого давление пара 10 в объеме над жидкостью 9 увеличивается и под его воздействием уровень жидкости 9 начинает уходить вниз, удаляясь от торца 3, Благодаря этому растягиванию сильфон 8, совершая перемещение ЙУ, Вместе с торцом снльфона 8 движется вниз и гибкий шток 14. При этом пружина 17 сжимается. Так как у пара незначительный коэффициент теплопроводности то молекулы пара эффективно нагреваются лишь у сечения торца 3. Вследствие этого у основной массы пара начинается конденсация в объеме камеры 5. Тогда давление пара 10 уменьшается и под воздействием пружины \7 силъфон 8 сжимается, перемещая вверх гибкий шток 14. В результате этого зеркало жидкости 9 занимает начальное положение, обеспечив тепловой контакт с торцом 3 стержня 1. Жидкость 9, прогреваясь, начинает снова испаряться и зеркало жидкости 9 уходит вниз. Вместе с этим растягивается сильфон 8,- перемещающий вниз гибкий шток 14. Указанный процесс колебания уровня жидкости 9 в цилиндре 5 периодически повторяется. Таким образом, на выходе исполнительного механизма 1-17 (фиг'. 1) получают возвратно-поступательные движения гибкого штока 14, Это приводит в действие преобразователь 36-44 возвратно-поступательного движения во вращательное (фиг. 2 ) . Возможность перемещения теплопроводной вставки 15 с постоянным объемом обеспечивает прямую зависимость между степенью заглубления h стержня 1 в жидкости 9 и величиной сжатия пружины 17, определяемой вращением гайки 16. Это позволяет точно задать оператору требуемую частоту колебаний (возвратно-поступательных движений) 5 1619228 гибкого штока 14, т.е. быстродействие 14. В зависимоеги от знака сигнала исполнительного механизма 1-17. небаланса врдомая шестерня 41 вращаВходная часть 18-33 регулятора ется в ту или иную сторону (в данном работает следующим образом (фиг. 2 ) , случае по часовой стрелке). Это приВ состоянии равновесия цилиндр водит к открытию проходного сечения кондуктор 20 блока сравнения находиттрубопроводе 46 per улиру.ощнм органом ся в среднем положении между замкну45, т.е. формированию регулирующего тыми полостями 21 и 22, что означает воздействия равную температуру газа в этих полос10 тях 21 и 22 и отсутствие регулирующего воздействия, т.е. гибкий шток I4 исполнительного механизма 1-17 нагде Т - постоянная времени интегриходится в среднем нейтральном полорования. жении и не входит во взаимодействие ]с Перемещение регулирующего органа с преобразователем 36-44 возвратно45 в трубопроводе 46, т.е. отработка поступательного движения вр вращарегулирующего воздействия X ^ продолтельное . жается до гех пор, пока ошибка ДХ= При отклонении регулируемой вели=}>"-Х^А не становится равной нулю. чины X; от задания X, . т.е. при по, ?0 При этом цилиндр - кондуктор 20 заявлении сигнала небаланса ДХ=Х--X э д нимает нейтральное среднее положение в зависимости от знака этого небаланотносительно полостей 21 и 22, что са стержень 19 перемещается вверх или обуславливает одинаковую температуру вниз. Здесь регулируемая величина X, в этих плоскостях. Гибкий шток 14 не (например, температура) преобразует- 25 входит в зацепление ни с одним из ся в линейное перемещение стержня храповых колес 37 и 38, т.е. отсут19. Например, стержень Iе* перемешаствуе г регулирующее воздействие. ется вверх, вместе с ним перемещается Орган настройки - постоянная вреи кондуктор 20. При этом увеличивамени интегрирования Т , позволяет ется плошадь контакта кондуктора 20 30 изменять время Т ц , меняя степень сжас полостью 21 и уменьшается площадь тия пружины 17 вращением гайки 16 контакта кондуктора 20 с полостью 22. (фиг. 1 ) . Поскольку полости 21 и 22 нагреваютУвеличивая степень сжатия пружины ся через кондуктор 20, температура 17, уменьшают частоту пульсаций исгаза в полости 21 увеличивается по сравнению с температурой газ? в поло- 35 полнительного механизма и, следовательно, уменьшают быстродействие иссти 22. Это вызывает увеличение объема полнительного механизма, т.е. увелисильфона 33 по сравнению с объемом чивают время интегрирования. Уменьсильфона 32. Свободный торец сильфошение частоты пульсации испольительна 33 перемещается влево. Это приво40 ного механизма при увеличении степедит к тому, что непрерывно совершаюни сжатия пружины 17 связано с тем, щий возвратно-поступательные движения что существует однозначная зависигибкий шток 14 перемещается влево и мость между степенью заглубления стержвходит в зацепление с храповым коленя в жидкости 9 и величино?' сжатия сом 37, что приводит в действие пре- 45 пружины 17, определяемой вращением образователь 36-44 движения. гайки 16. Чем больше степень сжатия Преобразователь 36-44 возвратнопружины 17, тем больше величина запоступательного движения во вращательглубления h стержня 1 в жидкости 9 и ное работает следующим образом (фиг.2], тем большему количеству лпдкости 9 В зависимости от знака сигнала не- 50 стержень 1 отдает тепло. La прогрев баланса Д Х возвратно-поступательное и испарение жидкости 9 в этом случае движение гьбкого штока 34 с собачкой тратится больше времени, что снижает 36 сообщает вращательное движение одчастоту пульсаций гибкою штока 14. ному из храповых колес J7 и 38 (доПри малых заглублениях h стержня 1 пустим храповому колесу 37). Собачка ее в жидкость 9, достигаемых чн счет пе36 поворачивает храповое колесо 37 ремещения гайки 16 вниз, с кпрость навместе с валом 42 и шестерней 39 на грева и испарения жидкости увеличичисло зубьев, соответствующих числу вается и частота пульсациг стержня импульсов перемещений гибкого штока 1619228 14 также увеличивается, обуславливая меньшее время интегрирования Т и и боЛЬПіее регулирующее ВОЭДеЙСТВИе У-аич за время существования ошибки ДХ. < . Ф о р м у л а и з о б р е т е н и я 8 мой величины, а исполнительный механизм интегрального действия выполнен в виде сильфонного осциллятора и состоит из цилиндра, наружная боковая поверхность которого снабжена ребрами, а полость, образованная внутренРегулятор с использованием теплоне:4 боковой поверхностью цилиндра и вой энергии, содержащий исполнительзакрепленного на цилиндре сильфона, ный механизм интегрального действия, ю частично заполнена жидкостью, в коизмеритель регулируемой величины, торой частично размещен с возможноблок сравнения и регулирующий орган, стью перемещения стержень, соединено т л и ч а ю щ и й с я тем, ч т о , с ный с тепловой шиной, причем боковая целью повышения надежности и точности поверхность стержня теплоизолирована, регулятора, в нем блок сравнения вы- 15 на подвижном торце сильфона со сторополнен из двух одинаковых заполненных ны внутренней полости закреплена тепгазом полостей, прилегающих одна к лопроводная вставка, а с внешней стодругой и выполнен' їх в виде параллероны - гибкий шток, причем силъ&он лепипедов, боковые поверхности котоподпружинен относительно цилиндра, рых покрыты теплоизоляцией, и кондук- 20 гибкий шток снабжен собачкой, устатора, выполненного из теплопроводного новленной с возможностью поочередноматериала, установленного между тепго контакта с одним из храповых колес, ловой шиной и торцами параллелепипесвязанных через шестерни с выходным д о в , установленных с возможностью валом, связанным с регулирующим орвертикального перемещения относитель- ^5 ганом, причем гибкий шток размещен но тепловой шины, теплоизолированной между двумя оппозитно расположенными от окружающей среды, кондуктор с посильфонами, полости которых капиллямощью теплоизолированного стержня . • рами связаны с полостями параллелесвязан с выходом измерителя регулируепипедов. 30 1619228 46 1 і . Редактор И.Дербак Составитель К.Мирная Техред Л.Олийнык Корректор БоГирняк •Заказ 46 Тираж ч/ Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113Q35, Москва, Ж-35, Раушская наб,, д. А/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул. Гагарина, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюController with use of heat energy
Автори англійськоюYeroshenko Valentyn Andriiovych, Bovdilova Alla Vitaliivna
Назва патенту російськоюРегулятор с использованием тепловой энергии
Автори російськоюЕрошенко Валентин Андреевич, Бовдилова Алла Витальевна
МПК / Мітки
МПК: G05B 11/00
Мітки: енергії, регулятор, використанням, теплової
Код посилання
<a href="https://ua.patents.su/6-9223-regulyator-z-vikoristannyam-teplovo-energi.html" target="_blank" rel="follow" title="База патентів України">Регулятор з використанням теплової енергії</a>
Гетерогенна термодинамічна система, спосіб перетворювання теплової енергії в механічну та пристрій перетворювання теплової енергії в механічну
Номер патенту: 9217
Опубліковано: 30.09.1996
Автор: Єрошенко Валентін Андрійович
МПК: F03G 7/00
Мітки: гетерогенна, спосіб, перетворювання, механічну, термодинамічна, енергії, пристрій, теплової, система
Формула / Реферат:
1.Гетерогенная термодинамическая система, содержащая жидкость и капиллярно-пористое тело с лиофобной поверхностью, отличающаяся тем, что, с целью повышения КПД и удельной работоспособности единицы объема системы и ускорения процессов преобразования энергии, система выполнена в виде взвеси в немагнитной жидкости частиц капиллярно-пористого тела из ферромагнитного материала.2.Способ преобразования тепловой энергии в механическую...
Регулятор тиску прямої дії “до себе”
Номер патенту: 7779
Опубліковано: 26.12.1995
Автор: Фрейдін Боріс Нісановіч
МПК: G05D 16/06
Мітки: до, регулятор, дії, тиску, себе, прямої
Формула / Реферат:
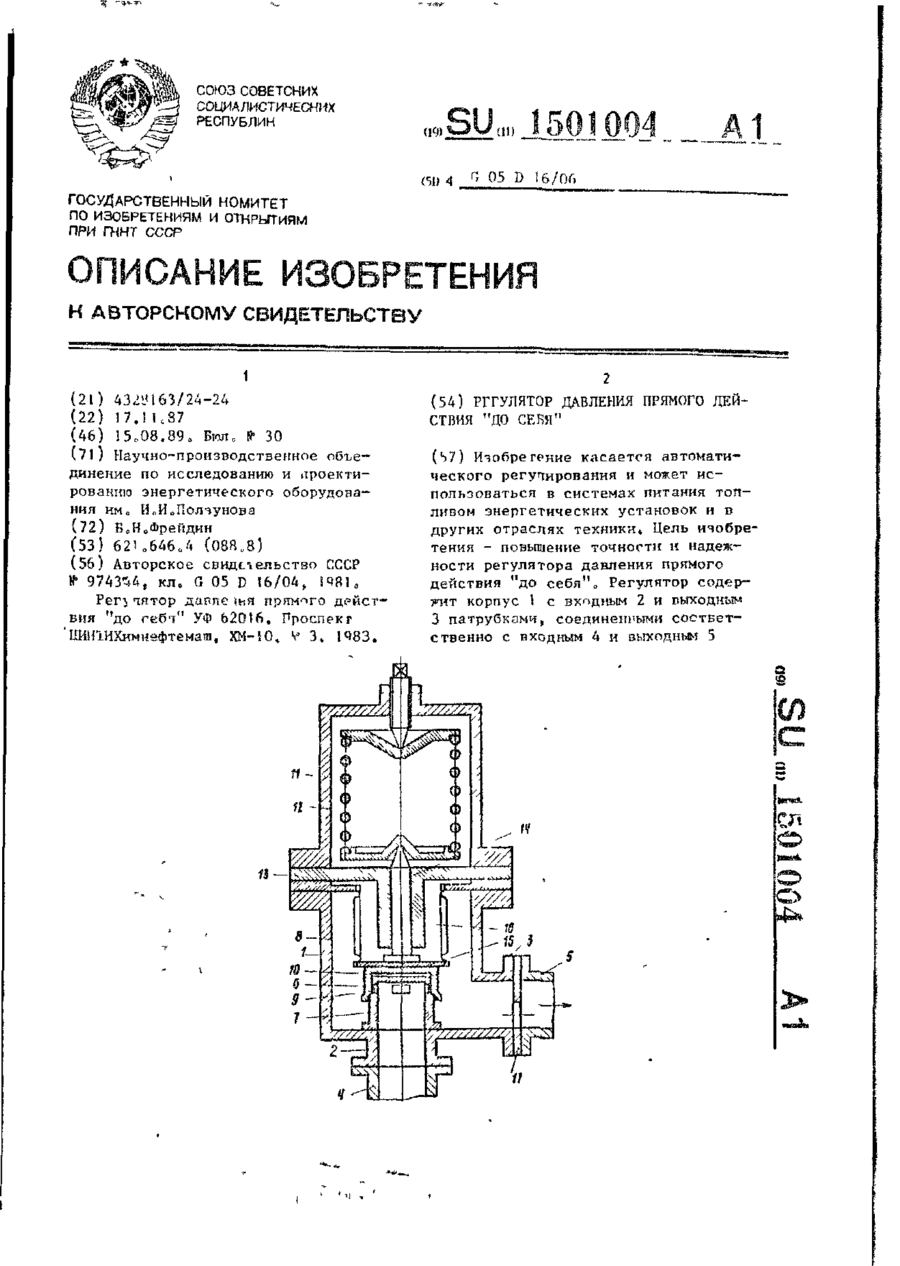
1. Регулятор давления прямого действия "до себя", содержащий корпус с входным и выходным патрубками, соединенными соответственно с входным и выходным трубопроводами, клапан, расположенный в промежуточной полости корпуса, которая соединена с входным патрубком через седло клапана, а также с выходным патрубком, пружину задания, расположенную в полости корпуса, которая отделена от промежуточной полости перегородкой, причем пружина...
Пропорційно-диференційований регулятор музичука
Номер патенту: 271
Опубліковано: 30.04.1993
Автор: Музичук Федір Максимович
МПК: G05B 11/00
Мітки: пропорційно-диференційований, музичука, регулятор
Формула / Реферат:
Пропорционально - дифференцирующий регулятор, содержащий измеритель отклонения регулируемого параметра, муфта которого механически связана с осью качания суммирующего рычага с возможностью ее вертикального перемещения, причем один конец этого рычага соединен со штоком поршня катаракта и с пружиной, которая соединена со штоком поршня сервомотора, кинематически связанного с регулирующим органом, а второй конец суммирующего рычага соединен...
Спосіб єрошенко перетворювання теплової енергії в механічну
Номер патенту: 9220
Опубліковано: 30.09.1996
Автор: Єрошенко Валентін Андрійович
МПК: F03G 7/00
Мітки: теплової, спосіб, енергії, механічну, єрошенко, перетворювання
Формула / Реферат:
Способ преобразования тепловой энергии в механическую по авт.св. №1254811, отличающийся тем, что, с целью повышения КПД без использования регенерации тепла, упрощения конструкции и уменьшения габаритов, реализующих способ тепловых двигателей путем организации квазиадиабатического охлаждения, в гетерогенной термодинамической системе жидкость имеет вторую производную от коэффициента поверхностного натяжения по температуре больше нуля.
Спосіб утилізації низькопотенційної теплової енергії та пристрій для його реалізації
Номер патенту: 5
Опубліковано: 30.04.1993
Автори: Зімін Леонід Борисович, Золотаренко Юрій Павлович, Черняк Вілен Павлович, Малашенко Едуард Миколайович
МПК: F03G 7/06
Мітки: енергії, реалізації, низькопотенційної, теплової, спосіб, утилізації, пристрій
Формула / Реферат:
1. Способ утилизации низкопотенциальной тепловой энергии, включающий создание вращающего момента путем перемещения промежуточного теплоносителя при его обратимых фазовых превращениях, отличающийся тем, что процессы теплообмена проводят при равных температурных напорах между температурой фазового перехода промежуточного теплоносителя и греющей и охлаждающей средами в одинаковых условиях теплообмена.2. Способ по п. 1, отличающийся тем,...
Попередній патент: Роторний тепловий двигун єрошенко
Наступний патент: Спосіб з’єднання плакованих матеріалів
Випадковий патент: Комбінована ротаційна ролева друкарська машина, зокрема, для друкування цінних грошевих знаків