Поперечно здвоєний модульний військовий наземний робот
Номер патенту: 93255
Опубліковано: 25.01.2011
Автори: Поповіченко Олександр Вікторович, Толстой Олексій Володимирович, Бєліков Віктор Трифонович, Васильєв Валерій Валентинович
Формула / Реферат
1. Поперечно здвоєний модульний військовий наземний робот, забезпечений електрохімічними, конденсаторними або комбінованими джерелами електричної енергії, її перетворювачами, електромеханічними колісними, гусеничними або комбінованими колісно-гусеничними рушіями, комплексами датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, прицільними пристосуваннями і озброєнням, а так само виконавчими механізмами, зокрема маніпуляторами, системою самоліквідації і іншим спеціальним устаткуванням, який відрізняється тим, що він складається з двох ідентичних по габаритах корпусних агрегатів-конструктивів, в яких в один шар закріплені комплекти функціональних блоків-модулів простої геометричної форми, причому обидва агрегати-конструктиви розміщені один біля одного в напрямі, перпендикулярному напряму руху робота, і механічно пов'язані один з одним з можливістю кутового зсуву один щодо одного.
2. Поперечно здвоєний модульний військовий наземний робот за п. 1, який відрізняється тим, що для механічного зв'язку двох агрегатів-конструктивів, з яких складається вказаний робот, використаний подовжній жорсткий стержень, розміщений на подовжній осі симетрії робота.
3. Поперечно здвоєний модульний військовий наземний робот за п. 1, який відрізняється тим, що для механічного зв'язку двох агрегатів-конструктивів, з яких складається вказаний робот, використаний кульовий шарнір, розміщений в центрі симетрії робота.
Текст
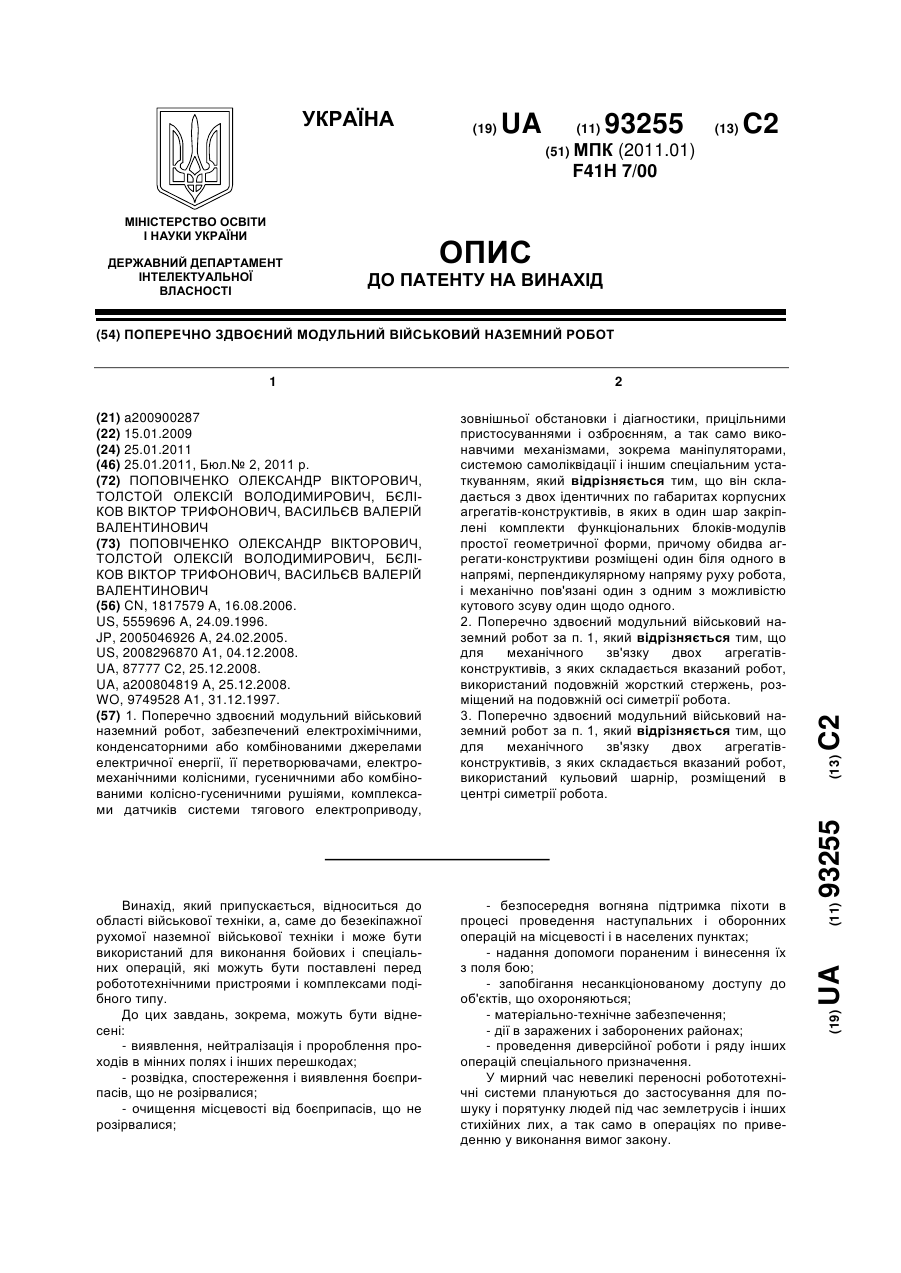
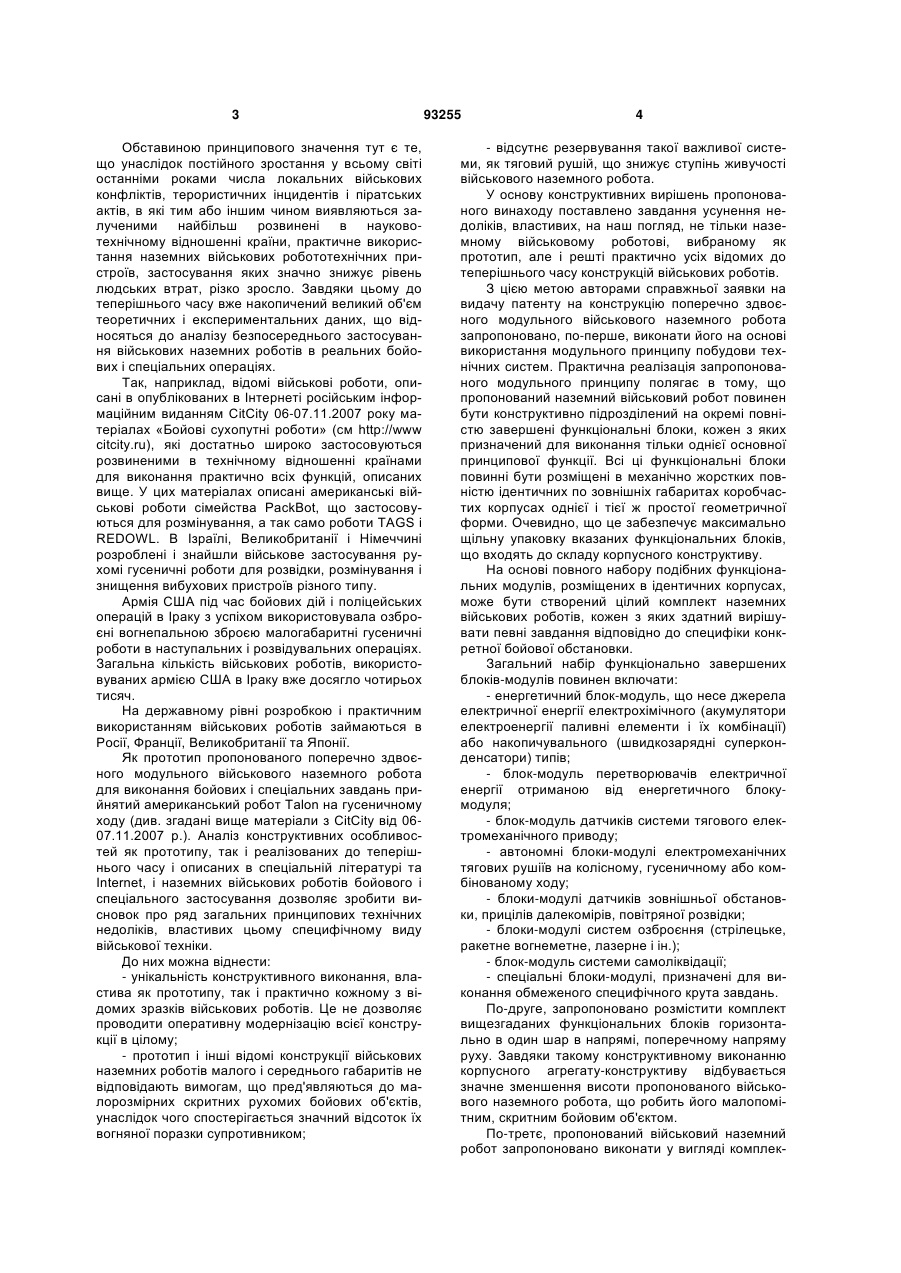
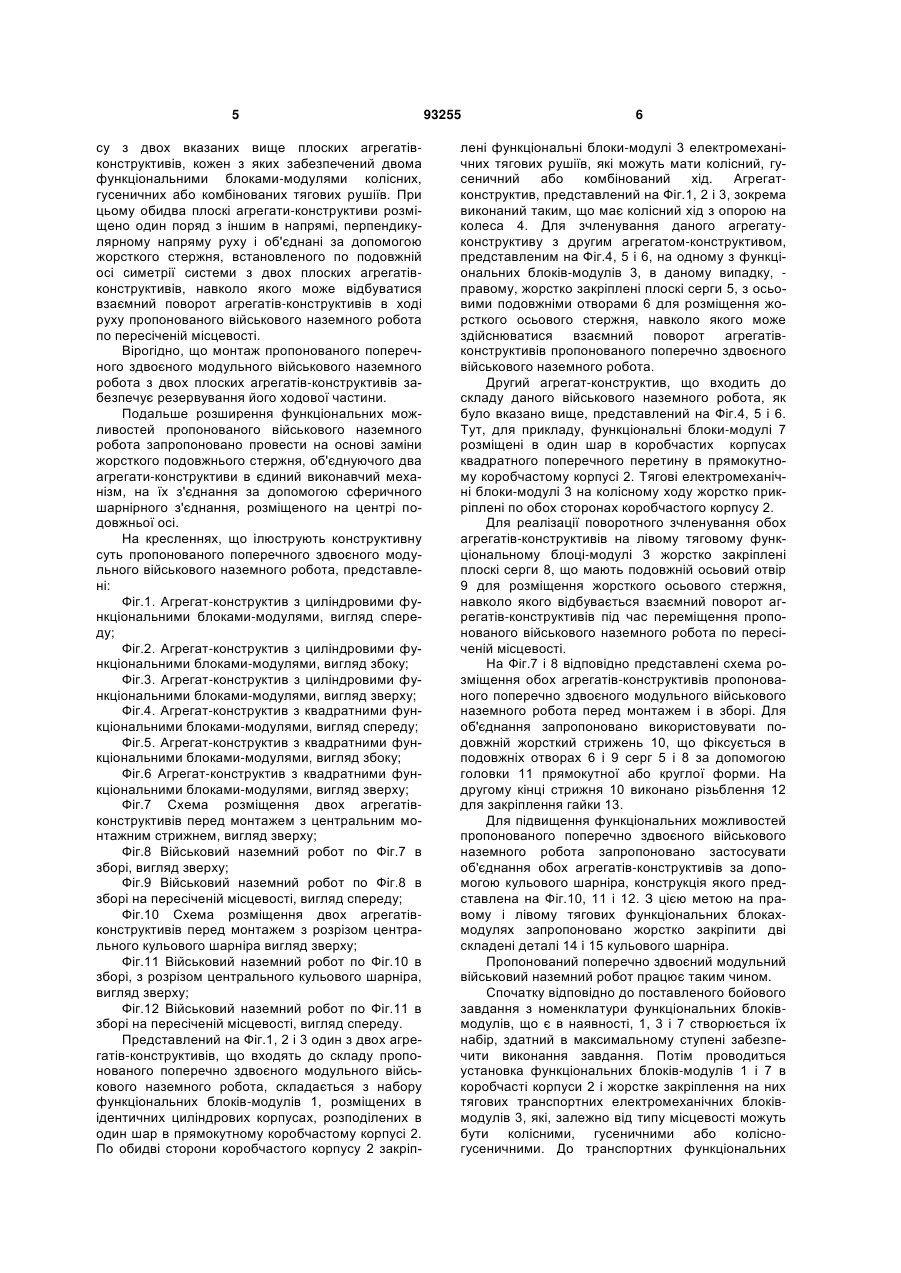
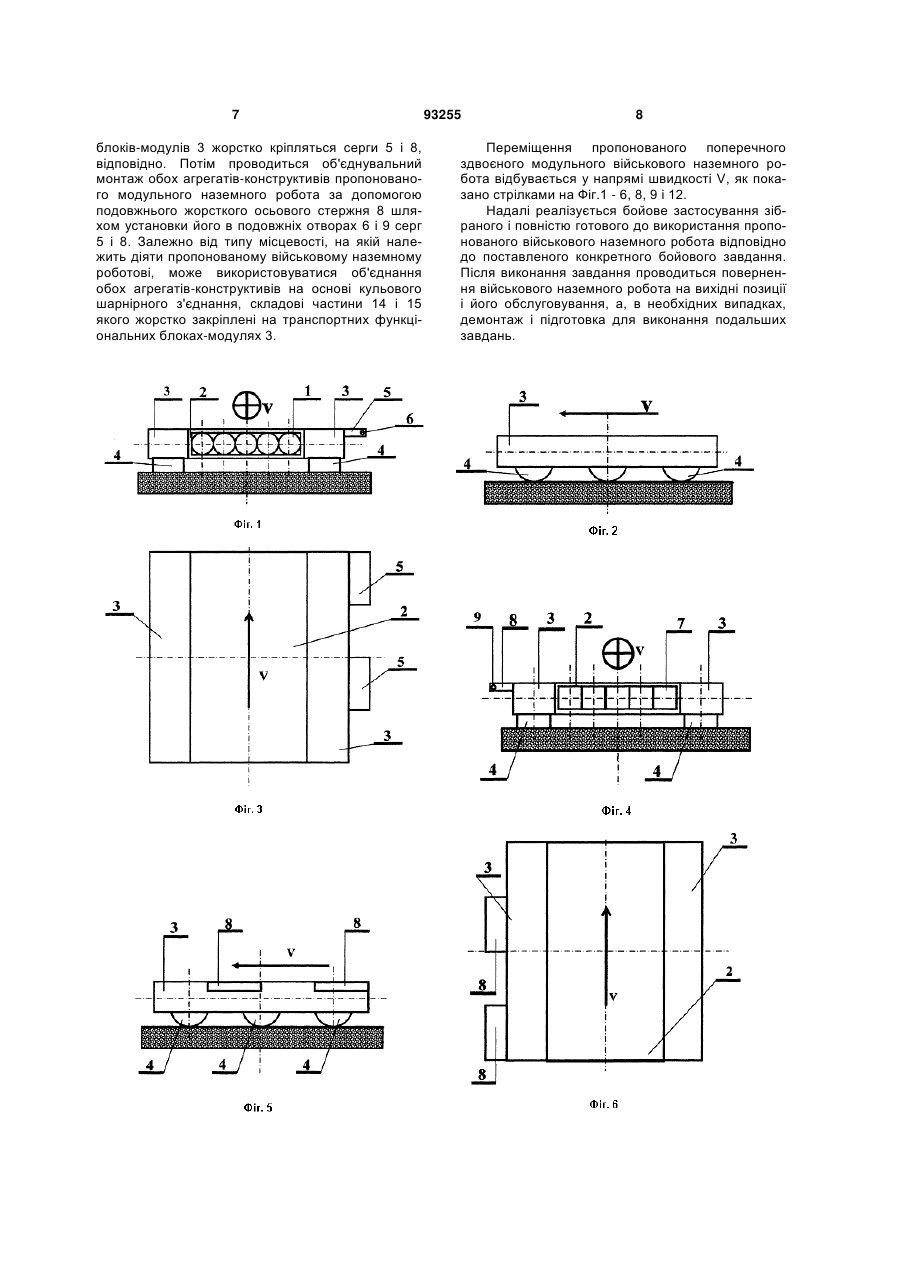
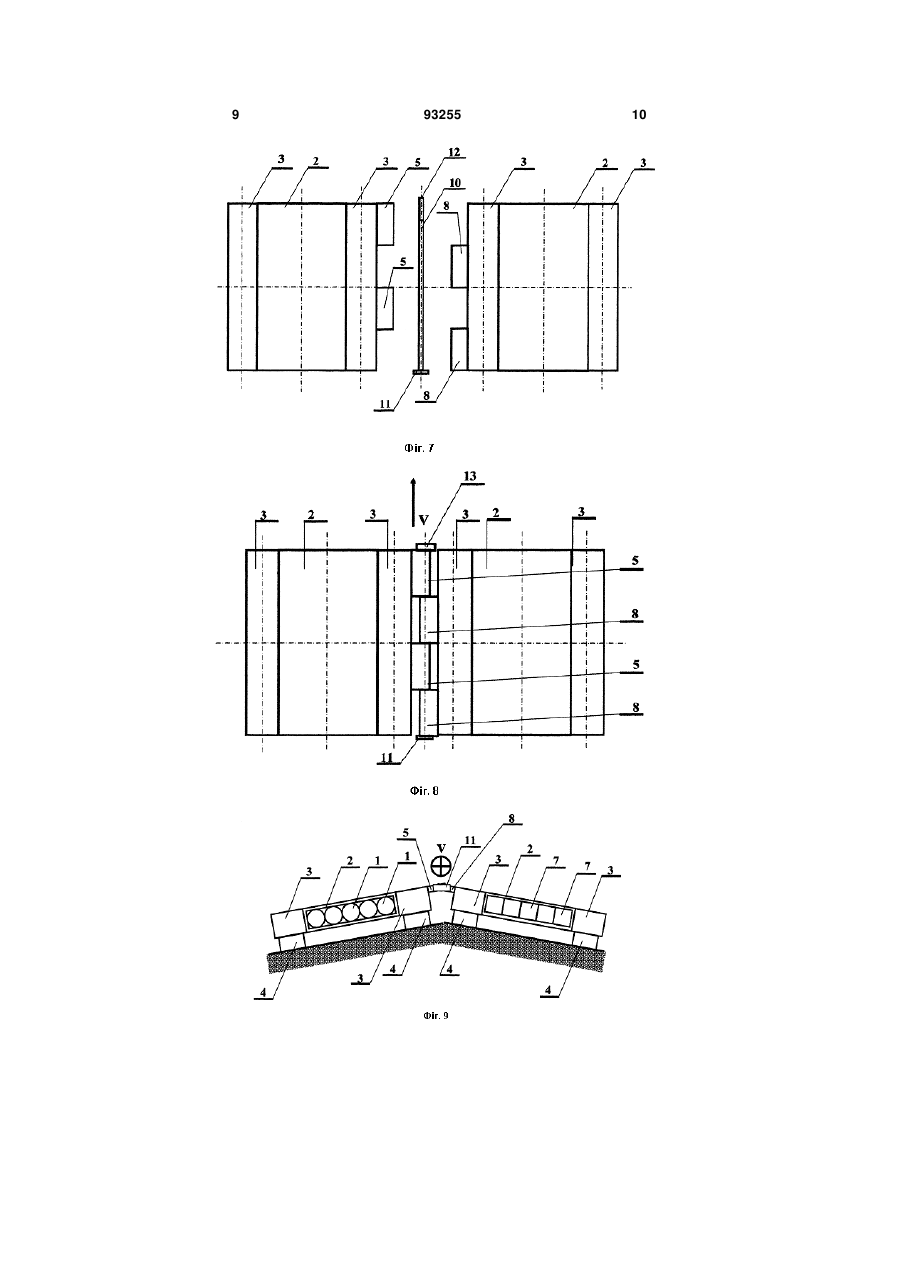
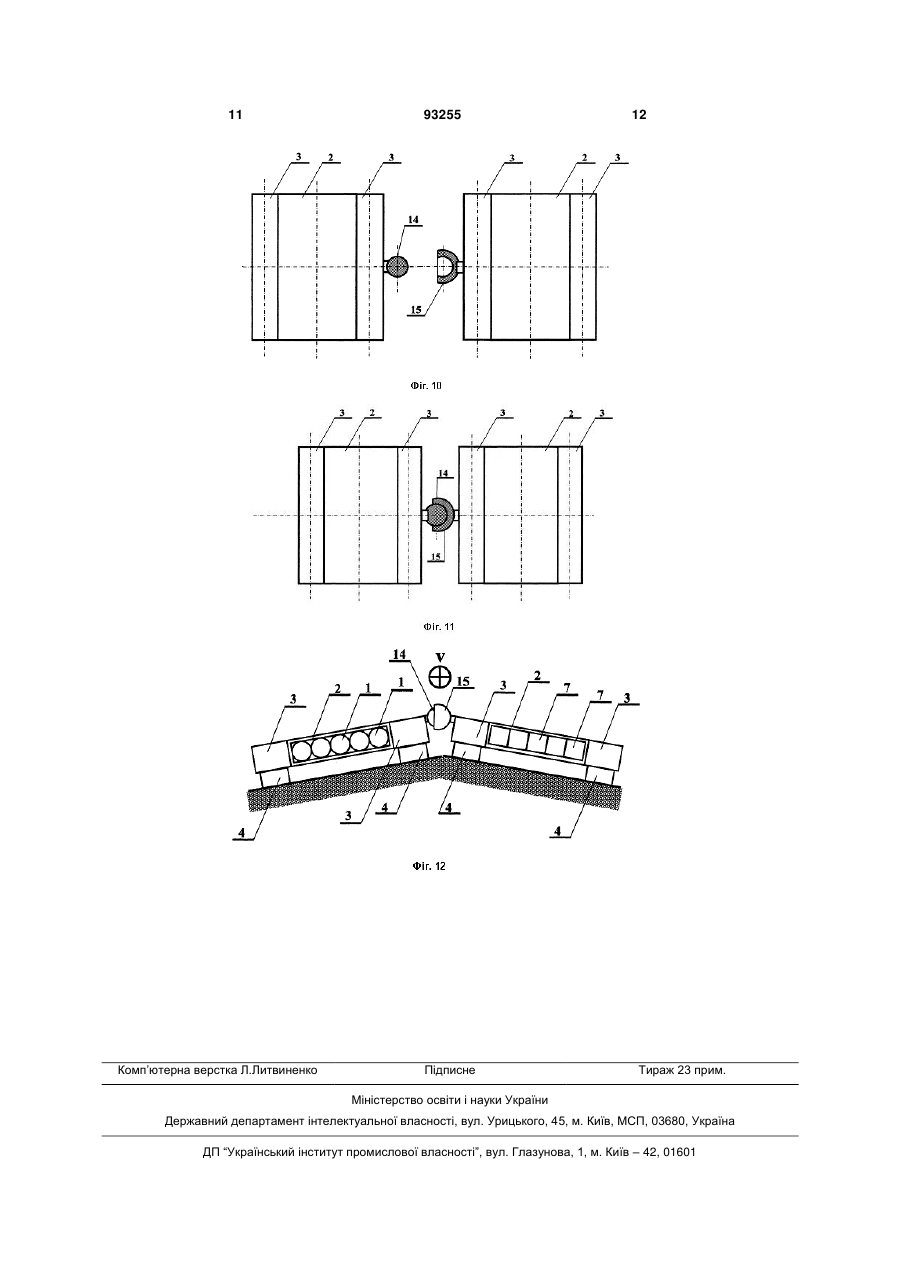
1. Поперечно здвоєний модульний військовий наземний робот, забезпечений електрохімічними, конденсаторними або комбінованими джерелами електричної енергії, її перетворювачами, електромеханічними колісними, гусеничними або комбінованими колісно-гусеничними рушіями, комплексами датчиків системи тягового електроприводу, C2 2 (19) 1 3 Обставиною принципового значення тут є те, що унаслідок постійного зростання у всьому світі останніми роками числа локальних військових конфліктів, терористичних інцидентів і піратських актів, в які тим або іншим чином виявляються залученими найбільш розвинені в науковотехнічному відношенні країни, практичне використання наземних військових робототехнічних пристроїв, застосування яких значно знижує рівень людських втрат, різко зросло. Завдяки цьому до теперішнього часу вже накопичений великий об'єм теоретичних і експериментальних даних, що відносяться до аналізу безпосереднього застосування військових наземних роботів в реальних бойових і спеціальних операціях. Так, наприклад, відомі військові роботи, описані в опублікованих в Інтернеті російським інформаційним виданням CitCity 06-07.11.2007 року матеріалах «Бойові сухопутні роботи» (см http://www citcity.ru), які достатньо широко застосовуються розвиненими в технічному відношенні країнами для виконання практично всіх функцій, описаних вище. У цих матеріалах описані американські військові роботи сімейства PackBot, що застосовуються для розмінування, а так само роботи TAGS і REDOWL. В Ізраїлі, Великобританії і Німеччині розроблені і знайшли військове застосування рухомі гусеничні роботи для розвідки, розмінування і знищення вибухових пристроїв різного типу. Армія США під час бойових дій і поліцейських операцій в Іраку з успіхом використовувала озброєні вогнепальною зброєю малогабаритні гусеничні роботи в наступальних і розвідувальних операціях. Загальна кількість військових роботів, використовуваних армією США в Іраку вже досягло чотирьох тисяч. На державному рівні розробкою і практичним використанням військових роботів займаються в Росії, Франції, Великобританії та Японії. Як прототип пропонованого поперечно здвоєного модульного військового наземного робота для виконання бойових і спеціальних завдань прийнятий американський робот Talon на гусеничному ходу (див. згадані вище матеріали з CitCity від 0607.11.2007 p.). Аналіз конструктивних особливостей як прототипу, так і реалізованих до теперішнього часу і описаних в спеціальній літературі та Internet, і наземних військових роботів бойового і спеціального застосування дозволяє зробити висновок про ряд загальних принципових технічних недоліків, властивих цьому специфічному виду військової техніки. До них можна віднести: - унікальність конструктивного виконання, властива як прототипу, так і практично кожному з відомих зразків військових роботів. Це не дозволяє проводити оперативну модернізацію всієї конструкції в цілому; - прототип і інші відомі конструкції військових наземних роботів малого і середнього габаритів не відповідають вимогам, що пред'являються до малорозмірних скритних рухомих бойових об'єктів, унаслідок чого спостерігається значний відсоток їх вогняної поразки супротивником; 93255 4 - відсутнє резервування такої важливої системи, як тяговий рушій, що знижує ступінь живучості військового наземного робота. У основу конструктивних вирішень пропонованого винаходу поставлено завдання усунення недоліків, властивих, на наш погляд, не тільки наземному військовому роботові, вибраному як прототип, але і решті практично усіх відомих до теперішнього часу конструкцій військових роботів. З цією метою авторами справжньої заявки на видачу патенту на конструкцію поперечно здвоєного модульного військового наземного робота запропоновано, по-перше, виконати його на основі використання модульного принципу побудови технічних систем. Практична реалізація запропонованого модульного принципу полягає в тому, що пропонований наземний військовий робот повинен бути конструктивно підрозділений на окремі повністю завершені функціональні блоки, кожен з яких призначений для виконання тільки однієї основної принципової функції. Всі ці функціональні блоки повинні бути розміщені в механічно жорстких повністю ідентичних по зовнішніх габаритах коробчастих корпусах однієї і тієї ж простої геометричної форми. Очевидно, що це забезпечує максимально щільну упаковку вказаних функціональних блоків, що входять до складу корпусного конструктиву. На основі повного набору подібних функціональних модулів, розміщених в ідентичних корпусах, може бути створений цілий комплект наземних військових роботів, кожен з яких здатний вирішувати певні завдання відповідно до специфіки конкретної бойової обстановки. Загальний набір функціонально завершених блоків-модулів повинен включати: - енергетичний блок-модуль, що несе джерела електричної енергії електрохімічного (акумулятори електроенергії паливні елементи і їх комбінації) або накопичувального (швидкозарядні суперконденсатори) типів; - блок-модуль перетворювачів електричної енергії отриманою від енергетичного блокумодуля; - блок-модуль датчиків системи тягового електромеханічного приводу; - автономні блоки-модулі електромеханічних тягових рушіїв на колісному, гусеничному або комбінованому ходу; - блоки-модулі датчиків зовнішньої обстановки, прицілів далекомірів, повітряної розвідки; - блоки-модулі систем озброєння (стрілецьке, ракетне вогнеметне, лазерне і ін.); - блок-модуль системи самоліквідації; - спеціальні блоки-модулі, призначені для виконання обмеженого специфічного крута завдань. По-друге, запропоновано розмістити комплект вищезгаданих функціональних блоків горизонтально в один шар в напрямі, поперечному напряму руху. Завдяки такому конструктивному виконанню корпусного агрегату-конструктиву відбувається значне зменшення висоти пропонованого військового наземного робота, що робить його малопомітним, скритним бойовим об'єктом. По-третє, пропонований військовий наземний робот запропоновано виконати у вигляді комплек 5 су з двох вказаних вище плоских агрегатівконструктивів, кожен з яких забезпечений двома функціональними блоками-модулями колісних, гусеничних або комбінованих тягових рушіїв. При цьому обидва плоскі агрегати-конструктиви розміщено один поряд з іншим в напрямі, перпендикулярному напряму руху і об'єднані за допомогою жорсткого стержня, встановленого по подовжній осі симетрії системи з двох плоских агрегатівконструктивів, навколо якого може відбуватися взаємний поворот агрегатів-конструктивів в ході руху пропонованого військового наземного робота по пересіченій місцевості. Вірогідно, що монтаж пропонованого поперечного здвоєного модульного військового наземного робота з двох плоских агрегатів-конструктивів забезпечує резервування його ходової частини. Подальше розширення функціональних можливостей пропонованого військового наземного робота запропоновано провести на основі заміни жорсткого подовжнього стержня, об'єднуючого два агрегати-конструктиви в єдиний виконавчий механізм, на їх з'єднання за допомогою сферичного шарнірного з'єднання, розміщеного на центрі подовжньої осі. На кресленнях, що ілюструють конструктивну суть пропонованого поперечного здвоєного модульного військового наземного робота, представлені: Фіг.1. Агрегат-конструктив з циліндровими функціональними блоками-модулями, вигляд спереду; Фіг.2. Агрегат-конструктив з циліндровими функціональними блоками-модулями, вигляд збоку; Фіг.3. Агрегат-конструктив з циліндровими функціональними блоками-модулями, вигляд зверху; Фіг.4. Агрегат-конструктив з квадратними функціональними блоками-модулями, вигляд спереду; Фіг.5. Агрегат-конструктив з квадратними функціональними блоками-модулями, вигляд збоку; Фіг.6 Агрегат-конструктив з квадратними функціональними блоками-модулями, вигляд зверху; Фіг.7 Схема розміщення двох агрегатівконструктивів перед монтажем з центральним монтажним стрижнем, вигляд зверху; Фіг.8 Військовий наземний робот по Фіг.7 в зборі, вигляд зверху; Фіг.9 Військовий наземний робот по Фіг.8 в зборі на пересіченій місцевості, вигляд спереду; Фіг.10 Схема розміщення двох агрегатівконструктивів перед монтажем з розрізом центрального кульового шарніра вигляд зверху; Фіг.11 Військовий наземний робот по Фіг.10 в зборі, з розрізом центрального кульового шарніра, вигляд зверху; Фіг.12 Військовий наземний робот по Фіг.11 в зборі на пересіченій місцевості, вигляд спереду. Представлений на Фіг.1, 2 і 3 один з двох агрегатів-конструктивів, що входять до складу пропонованого поперечно здвоєного модульного військового наземного робота, складається з набору функціональних блоків-модулів 1, розміщених в ідентичних циліндрових корпусах, розподілених в один шар в прямокутному коробчастому корпусі 2. По обидві сторони коробчастого корпусу 2 закріп 93255 6 лені функціональні блоки-модулі 3 електромеханічних тягових рушіїв, які можуть мати колісний, гусеничний або комбінований хід. Агрегатконструктив, представлений на Фіг.1, 2 і 3, зокрема виконаний таким, що має колісний хід з опорою на колеса 4. Для зчленування даного агрегатуконструктиву з другим агрегатом-конструктивом, представленим на Фіг.4, 5 і 6, на одному з функціональних блоків-модулів 3, в даному випадку, правому, жорстко закріплені плоскі серги 5, з осьовими подовжніми отворами 6 для розміщення жорсткого осьового стержня, навколо якого може здійснюватися взаємний поворот агрегатівконструктивів пропонованого поперечно здвоєного військового наземного робота. Другий агрегат-конструктив, що входить до складу даного військового наземного робота, як було вказано вище, представлений на Фіг.4, 5 і 6. Тут, для прикладу, функціональні блоки-модулі 7 розміщені в один шар в коробчастих корпусах квадратного поперечного перетину в прямокутному коробчастому корпусі 2. Тягові електромеханічні блоки-модулі 3 на колісному ходу жорстко прикріплені по обох сторонах коробчастого корпусу 2. Для реалізації поворотного зчленування обох агрегатів-конструктивів на лівому тяговому функціональному блоці-модулі 3 жорстко закріплені плоскі серги 8, що мають подовжній осьовий отвір 9 для розміщення жорсткого осьового стержня, навколо якого відбувається взаємний поворот агрегатів-конструктивів під час переміщення пропонованого військового наземного робота по пересіченій місцевості. На Фіг.7 і 8 відповідно представлені схема розміщення обох агрегатів-конструктивів пропонованого поперечно здвоєного модульного військового наземного робота перед монтажем і в зборі. Для об'єднання запропоновано використовувати подовжній жорсткий стрижень 10, що фіксується в подовжніх отворах 6 і 9 серг 5 і 8 за допомогою головки 11 прямокутної або круглої форми. На другому кінці стрижня 10 виконано різьблення 12 для закріплення гайки 13. Для підвищення функціональних можливостей пропонованого поперечно здвоєного військового наземного робота запропоновано застосувати об'єднання обох агрегатів-конструктивів за допомогою кульового шарніра, конструкція якого представлена на Фіг.10, 11 і 12. З цією метою на правому і лівому тягових функціональних блокахмодулях запропоновано жорстко закріпити дві складені деталі 14 і 15 кульового шарніра. Пропонований поперечно здвоєний модульний військовий наземний робот працює таким чином. Спочатку відповідно до поставленого бойового завдання з номенклатури функціональних блоківмодулів, що є в наявності, 1, 3 і 7 створюється їх набір, здатний в максимальному ступені забезпечити виконання завдання. Потім проводиться установка функціональних блоків-модулів 1 і 7 в коробчасті корпуси 2 і жорстке закріплення на них тягових транспортних електромеханічних блоківмодулів 3, які, залежно від типу місцевості можуть бути колісними, гусеничними або колісногусеничними. До транспортних функціональних 7 блоків-модулів 3 жорстко кріпляться серги 5 і 8, відповідно. Потім проводиться об'єднувальний монтаж обох агрегатів-конструктивів пропонованого модульного наземного робота за допомогою подовжнього жорсткого осьового стержня 8 шляхом установки його в подовжніх отворах 6 і 9 серг 5 і 8. Залежно від типу місцевості, на якій належить діяти пропонованому військовому наземному роботові, може використовуватися об'єднання обох агрегатів-конструктивів на основі кульового шарнірного з'єднання, складові частини 14 і 15 якого жорстко закріплені на транспортних функціональних блоках-модулях 3. 93255 8 Переміщення пропонованого поперечного здвоєного модульного військового наземного робота відбувається у напрямі швидкості V, як показано стрілками на Фіг.1 - 6, 8, 9 і 12. Надалі реалізується бойове застосування зібраного і повністю готового до використання пропонованого військового наземного робота відповідно до поставленого конкретного бойового завдання. Після виконання завдання проводиться повернення військового наземного робота на вихідні позиції і його обслуговування, а, в необхідних випадках, демонтаж і підготовка для виконання подальших завдань. 9 93255 10 11 Комп’ютерна верстка Л.Литвиненко 93255 Підписне 12 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCross-paired module military surface robot
Автори англійськоюPopovichenko Oleksandr Viktorovych, Tolstoi Oleksii Volodymyrovych, Berlikov Viktor Tryfonovych, Vasyliev Valerii Valentynovych
Назва патенту російськоюПоперечно сдвоенный модульный военный наземный робот
Автори російськоюПоповиченко Александр Викторович, Толстой Алексей Владимирович, Беликов Виктор Трифонович, Васильев Валерий Валентинович
МПК / Мітки
МПК: F41H 7/00
Мітки: військовий, поперечної, здвоєний, робот, наземний, модульний
Код посилання
<a href="https://ua.patents.su/6-93255-poperechno-zdvoehnijj-modulnijj-vijjskovijj-nazemnijj-robot.html" target="_blank" rel="follow" title="База патентів України">Поперечно здвоєний модульний військовий наземний робот</a>
Здвоєний модульно структурований військовий наземний робот
Номер патенту: 88833
Опубліковано: 25.11.2009
Автори: Лещенко Олег Іванович, Поповіченко Олександр Вікторович, Беліков Віктор Тріфонович, Толстой Олексій Володимирович
МПК: F41H 7/00
Мітки: здвоєний, військовий, модульної, структурований, робот, наземний
Формула / Реферат:
1. Здвоєний модульно структурований наземний військовий робот для ведення бойових і спеціальних операцій, що має необхідний комплект виконавчої апаратури і пристроїв у вигляді електрохімічних або накопичувальних джерел електричної енергії, її перетворювачів, електромеханічних рушіїв колісного, гусеничного або комбінованого типів, набору датчиків, аналізаторів зовнішньої обстановки, маніпуляторів, озброєння з прицілами, який відрізняється тим,...
Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем
Номер патенту: 90969
Опубліковано: 10.06.2010
Автори: Толстой Олексій Володимирович, Грачьов Микола Миколайович, Поповіченко Олександр Вікторович, Васильєв Валерій Валентинович, Беліков Віктор Тріфонович
МПК: F41H 7/00
Мітки: модульної, військовий, гвинтовим, структурований, підіймачем, вертикальним, наземний, робот
Формула / Реферат:
1. Модульно структурований військовий наземний робот з вертикальним гвинтовим підіймачем, що включає електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект виконавчих механізмів, зокрема маніпулятори, системи озброєння і...
Модульно структурований військовий наземний робот
Номер патенту: 87777
Опубліковано: 10.08.2009
Автори: Поповіченко Олександр Вікторович, Беліков Віктор Тріфонович, Толстой Олексій Володимирович, Лещенко Олег Іванович
МПК: F41H 7/00
Мітки: військовий, наземний, модульної, робот, структурований
Формула / Реферат:
1. Модульно структурований військовий наземний робот бойового або спеціального застосування, що включає електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект виконавчих механізмів, зокрема маніпулятори, системи озброєння і...
Модульно структурований військовий наземний робот для бойових і спеціальних операцій
Номер патенту: 88585
Опубліковано: 26.10.2009
Автори: Беліков Віктор Тріфонович, Поповіченко Олександр Вікторович, Васильєв Валерій Валентинович, Толстой Олексій Володимирович, Лещенко Олег Іванович
МПК: F41H 13/00
Мітки: наземний, бойових, модульної, структурований, військовий, спеціальних, операцій, робот
Формула / Реферат:
1. Модульно структурований військовий наземний робот для бойових і спеціальних операцій, що включає розміщені в корпусному конструктиві електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а також комплект виконавчих механізмів, зокрема маніпулятори,...
Модульно структурований військовий наземний робот з функціональними блоками-модулями повороту
Номер патенту: 90979
Опубліковано: 10.06.2010
Автори: Васильєв Валерій Валентинович, Толстой Олексій Володимирович, Беліков Віктор Тріфонович, Поповіченко Олександр Вікторович
МПК: F41H 7/00
Мітки: робот, військовий, функціональними, модульної, наземний, повороту, структурований, блоками-модулями
Формула / Реферат:
1. Модульно структурований військовий наземний робот з функціональними блоками-модулями повороту, що включає електрохімічні, конденсаторні або комбіновані джерела електричної енергії, її перетворювачі, електромеханічні колісні, гусеничні або колісно-гусеничні рушії, комплекси датчиків системи тягового електроприводу, зовнішньої обстановки і діагностики, а так само комплект головного виконавчого устаткування, що включає системи стрілецького і...
Попередній патент: Спосіб отримання препарату інсуліну для перорального застосування
Наступний патент: Багатоярусний сепаратор для мокрого гравітаційного збагачення руд
Випадковий патент: Композиція чорнильної пасти для кулькових ручок