Привід пристрою регулювання напруги силового трансформатора під навантаженням
Номер патенту: 94521
Опубліковано: 10.05.2011
Автори: Кацалап Сергій Михайлович, Рассальський Олександр Миколайович, Гребеніков Віктор Володимирович
Формула / Реферат
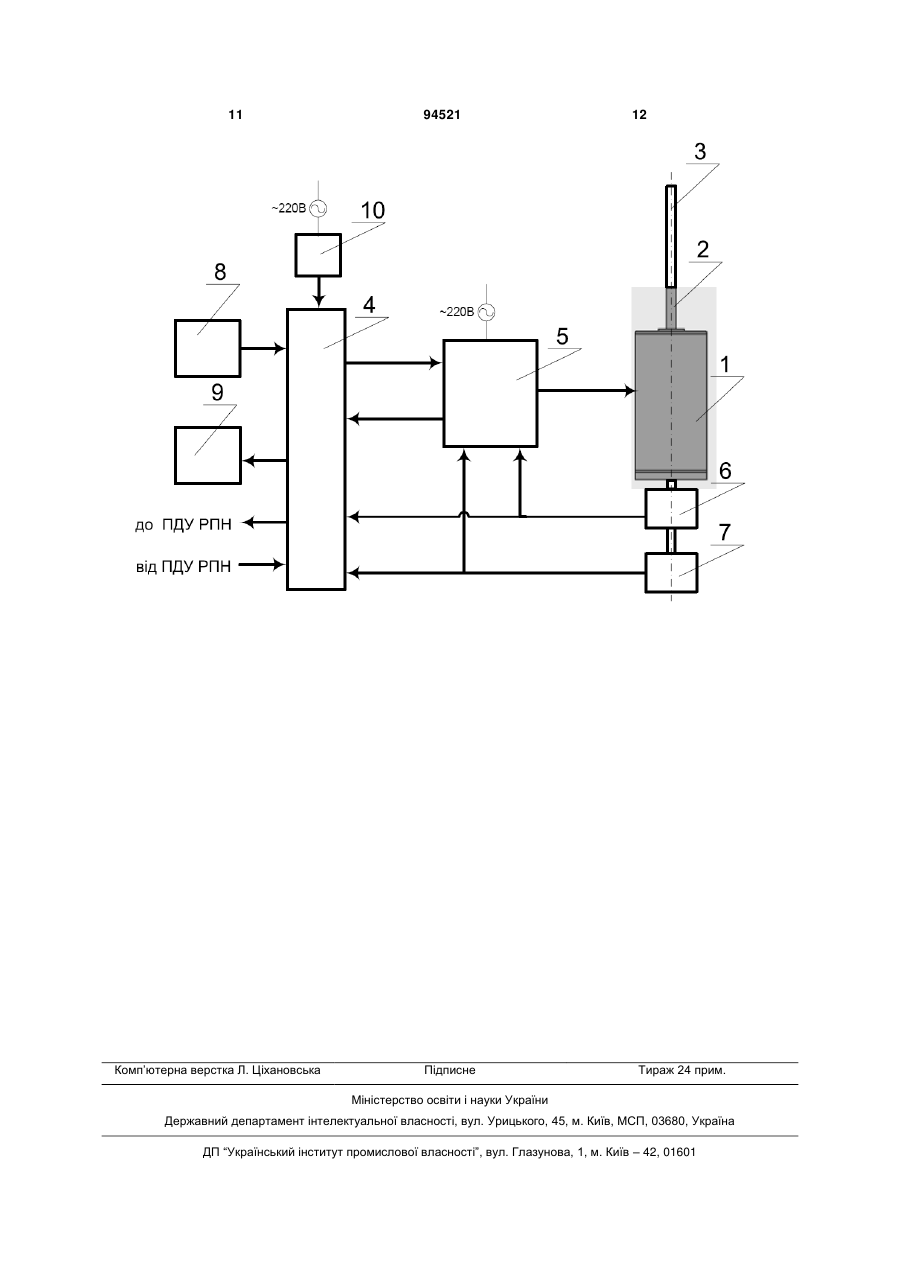
Привід пристрою регулювання напруги силового трансформатора під навантаженням, що включає електродвигун з вихідним валом, привідний вал пристрою регулювання, датчик положення, систему управління привода пристрою регулювання під навантаженням, який відрізняється тим, що як електродвигун привід містить вентильний електродвигун з постійними магнітами, вихідний вал якого безпосередньо з'єднаний із привідним валом пристрою регулювання під навантаженням (РПН), система управління привода пристрою регулювання під навантаженням зв'язана з пристроєм дистанційного управління, виконана цифровою і містить програмований логічний контролер, блок силової комутації обмоток вентильного двигуна з постійними магнітами, датчик кута комутації обмоток двигуна, як датчик положення використовують датчик положення і швидкості вала двигуна, панель управління, панель індикації положення пристрою регулювання під навантаженням і джерело безперебійного живлення, причому вихід джерела безперебійного живлення з'єднаний з першим входом програмованого логічного контролера, другий вхід програмованого логічного контролера з'єднаний з виходом панелі управління, третій його вхід з'єднаний з виходом пристрою дистанційного управління приводом пристрою регулювання під навантаженням, четвертий його вхід з'єднаний з першим виходом блока силової комутації обмоток вентильного двигуна з постійними магнітами, перший вихід програмованого логічного контролера з'єднаний з першим входом блока силової комутації, другий його вихід з'єднаний з входом панелі індикації положення пристрою регулювання під навантаженням, третій його вихід з'єднаний з входом пристрою дистанційного управління приводом пристрою регулювання під навантаженням, другий вхід блока силової комутації з'єднаний з джерелом напруги, другий його вихід з'єднаний з обмотками вентильного двигуна з постійними магнітами, вихід датчика кута комутації з'єднаний з п'ятим входом програмованого логічного контролера і третім входом блока силової комутації, вихід датчика положення і швидкості з'єднаний з шостим входом програмованого логічного контролера і четвертим входом блока силової комутації, при цьому датчик кута комутації і датчик положення і швидкості розміщені на загальній осі з вентильним двигуном з постійними магнітами.
Текст
Привід пристрою регулювання напруги силового трансформатора під навантаженням, що включає електродвигун з вихідним валом, привідний вал пристрою регулювання, датчик положення, систему управління привода пристрою регулювання під навантаженням, який відрізняється тим, що як електродвигун привід містить вентильний електродвигун з постійними магнітами, вихідний вал якого безпосередньо з'єднаний із привідним валом пристрою регулювання під навантаженням (РПН), система управління привода пристрою регулювання під навантаженням зв'язана з пристроєм дистанційного управління, виконана цифровою і містить програмований логічний контролер, блок силової комутації обмоток вентильного двигуна з постійними магнітами, датчик кута комутації обмоток двигуна, як датчик поло C2 2 UA 1 3 електродвигун з вихідним валом, привідний вал пристрою регулювання, датчик положення, систему управління привода пристрою регулювання під навантаженням. У приводі пристрою регулювання напруги силових трансформаторів під навантаженням датчик положення виконаний з упором. Привідний вал споряджений ведучим колесом. Вихідний вал споряджений веденим колесом. Блок передачі моменту руху на вихідний вал містить механізм розчіплювання і механізм блокування, що включає вісь із прапорцем, а датчик положення встановлений з можливістю взаємодії в кінцевих положеннях його упора з прапорцем. Механізм блокування оснащений стаканом з пазом, кулачком із зубом і виступами, а механізм розчіплювання виконаний у вигляді осі, пружини, втулки і засувок, кожна з яких виконана з хвостовиком і зубом. Вихідний вал виконаний з пазами, зміщеними уздовж його осі. Вісь механізму розчіплювання жорстко закріплена на втулці і веденому колесі. Засувки вільно розміщені на осі механізму розчіплювання і зв'язані його пружиною. Зуби засувок введені в пази вихідного вала, а кулачок механізму блокування жорстко закріплений на його осі, вільно встановленій в нерухомому стакані. Кулачок установлений так, що його зуб розміщений у пазу стакана, а кожен його виступ має можливість взаємодії в кінцевих положеннях із хвостовиком відповідної засувки в залежності від напрямку обертання. Відомий привід характеризується низькою експлуатаційною надійністю, високою трудомісткістю при виготовленні і низькою точністю позиціювання при регулюванні під навантаженням. Це пояснюється тим, що привід являє собою складний електромеханічний пристрій з безліччю взаємодіючих між собою деталей, оснащених прапорцями, втулками, пружинами, засувками, хвостовиками, зубами. У процесі роботи всі ці елементи швидко зношуються і знижується точність позиціювання при регулюванні напруги силового трансформатора під навантаженням. Наявність великої кількості взаємодіючих між собою деталей вимагає дуже високої точності при виготовленні, що пов'язане з великими трудовитратами і високою трудомісткістю при виготовленні такого привода. Найменше відхилення в розмірах прапорців, втулок, пружин, засувок, хвостовика, зубів приведе до зниження надійності привода, нестабільної його роботи, що, у свою чергу, приведе до порушення роботи силового трансформатора. В основу винаходу поставлена задача удосконалити привід пристрою РПН шляхом уведення нових конструктивних елементів, нових зв'язків між конструктивними елементами, нового виконання конструктивних елементів, що забезпечить підвищення його експлуатаційної надійності, зниження трудомісткості при виготовленні, підвищення точності позиціювання при регулюванні. Поставлена задача вирішується тим, що в приводі пристрою регулювання напруги силового трансформатора під навантаженням, що включає електродвигун з вихідним валом, привідний вал пристрою регулювання, датчик положення, систе 94521 4 му управління привода пристрою регулювання під навантаженням, відповідно до технічного рішення, новим є те, що як електродвигун привід містить вентильний електродвигун з постійними магнітами, вихідний вал якого безпосередньо з'єднаний із привідним валом пристрою регулювання під навантаженням (РПН), система управління привода пристрою регулювання під навантаженням зв'язана з пристроєм дистанційного управління (ПДУ), виконана цифровою і містить програмований логічний контролер, блок силової комутації обмоток вентильного двигуна з постійними магнітами, датчик кута комутації обмоток двигуна, датчик положення і швидкості вала двигуна, панель управління, панель індикації положення пристрою регулювання під навантаженням і джерело безперебійного живлення, причому вихід джерела безперебійного живлення з'єднаний з першим входом програмованого логічного контролера, другий вхід програмованого логічного контролера з'єднаний з виходом панелі управління, третій його вхід з'єднаний з виходом пристрою дистанційного управління приводом пристрою регулювання під навантаженням, четвертий його вхід з'єднаний з першим виходом блока силової комутації обмоток вентильного двигуна з постійними магнітами, перший вихід програмованого логічного контролера з'єднаний з першим входом блока силової комутації, другий його вихід з'єднаний з входом панелі індикації положення пристрою регулювання під навантаженням, третій його вихід з'єднаний з входом пристрою дистанційного управління приводом пристрою регулювання під навантаженням, другий вхід блока силової комутації з'єднаний з джерелом напруги, другий його вихід з'єднаний з обмотками вентильного двигуна з постійними магнітами, вихід датчика кута комутації з'єднаний з п'ятим входом програмованого логічного контролера і третім входом блока силової комутації, вихід датчика положення і швидкості з'єднаний з шостим входом програмованого логічного контролера і четвертим входом блока силової комутації, при цьому датчик кута комутації і датчик положення і швидкості розміщені на загальній осі з вентильним двигуном з постійними магнітами. Причинно-наслідковий зв'язок між сукупністю суттєвих ознак винаходу і технічним результатом, що досягається, полягає в наступному. Вентильний електродвигун з постійними магнітами забезпечує підвищення експлуатаційної надійності привода пристрою РПН і підвищення точності позиціювання при регулюванні, тому що в ньому відсутні взаємодіючі між собою деталі, споряджені прапорцями, втулками, пружинами, засувками, хвостовиками, зубами. Вентильний електродвигун з постійними магнітами дозволяє визначати момент навантаження на валу пристрою РПН, тому що величина електромагнітного моменту, що розвивається, має лінійну залежність від струму навантаження. Це дає можливість здійснювати моніторинг роботи пристрою РПН, що сприяє підвищенню точності позиціювання при регулюванні. Мінімальне значення струмів холостого ходу і робочих струмів вентильного електродвигуна з постійними магнітами дозволяє досить точно вимірю 5 вати навантаження на привід і оптимізувати режим роботи. У вентильному електродвигуні з постійними магнітами відсутні обмотки на роторі, тому немає тепловиділення від ротора. Це обумовлює збільшення терміну служби привода, тому що збільшується ресурс ізоляційних матеріалів. Привід, що містить вентильний електродвигун з постійними магнітами, здатний працювати в нестандартних режимах з можливими перевантаженнями. Програмований логічний контролер призначений для контролю поточного положення пристрою РПН. Блок силової комутації відпрацьовує заданий режим переключення пристрою РПН по положенню, швидкості переміщення і струму. Датчик кута комутації призначений для виміру положення ротора вентильного двигуна щодо статора і визначає кут комутації фазних обмоток вентильного двигуна. Датчик положення і швидкості призначений для виміру кутової швидкості обертання вала вентильного двигуна, визначення його положення і підрахунку кількості оборотів вала двигуна і забезпечує високу точність позиціювання при переключенні. Джерело безперебійного живлення забезпечує безперебійну роботу привода. Панель індикації положення відображає дані про поточне положення пристрою РПН. Панель управління призначена для подачі команд у режимі автономного управління. Після підключення першого входу програмованого логічного контролера і другого входу блока силової комутації до джерел живлення від пристрою дистанційного управління приводом пристрою РПН на третій вхід програмованого логічного контролера надходить команда виконати переключення n+1 або n-1, де n - поточне положення пристрою РПН, тобто перейти в наступне його положення або повернутися в попереднє. Програмований логічний контролер контролює поточне положення пристрою РПН і порівнює його з отриманою командою. Якщо пристрій РПН не знаходиться в крайньому положенні, то з першого виходу програмованого логічного контролера на перший вхід блока силової комутації надходить команда виконати переключення. Блок силової комутації відпрацьовує заданий режим переключення пристрою РПН і на його другому виході збуджуються фазні струми для управління обертанням вала вентильного двигуна. З виходу датчика кута комутації на третій вхід блока силової комутації надходить сигнал зворотного зв'язку для синхронізації моменту переключення фазних струмів вентильного двигуна. Одночасно з виходу датчика положення і швидкості на четвертий вхід блока силової комутації надходить сигнал про положення і швидкість вала вентильного двигуна. У блоці силової комутації, що містить контур положення, контур швидкості і контур струму, здійснюється пропорційно-інтегральне регулювання, забезпечуючи задане переміщення за часом і положенням, що, при необхідності, у процесі експлуатації може бути змінене в широкому діапазоні. Одночасно з виходу датчика кута комутації надходить сигнал на п'ятий вхід програмованого логічного контролера, а з виходу датчика положення і швидкості на шостий вхід програмованого логічного контролера. 94521 6 Програмований логічний контролер здійснює по цих сигналах арифметично-логічний контроль позиціювання (переміщення) пристрою РПН і за результатами контролю, при необхідності, виробляє зі свого першого виходу на перший вхід блока силової комутації коригувальні команди. З першого виходу блока силової комутації на четвертий вхід програмованого логічного контролера надходять сигнали про стан режиму переключення пристрою РПН, зокрема про величину струму, про поточне положення пристрою РПН, про те, чи йде переключення в даний момент. З третього виходу програмованого логічного контролера на вхід пристрою дистанційного управління приводом пристрою РПН надходять усі необхідні для управління сигнали, що можуть бути розширені до будьякого цифрового стандарту, у тому числі і для систем моніторингу. З другого виходу програмованого логічного контролера надходить сигнал про поточне положення пристрою РПН на вхід панелі індикації положення. Програмований логічний контролер зберігає відомості про поточне положення пристрою РПН у флеш-пам'яті при зникненні живлення. З виходу панелі управління на другий вхід програмованого логічного контролера в ручному режимі подаються команди, аналогічні командам від пристрою дистанційного управління приводом пристрою РПН. Приводом, що заявляється, і який містить як електродвигун вентильний двигун з постійними магнітами, вихідний вал якого безпосередньо з'єднаний із привідним валом пристрою РПН, у якому система управління привода пристрою РПН виконана цифровою і містить програмований логічний контролер, блок силової комутації обмоток вентильного двигуна з постійними магнітами, датчик кута комутації обмоток двигуна, датчик положення і швидкості вала двигуна, панель управління, панель індикації положення пристрою РПН і джерело безперебійного живлення, забезпечується підвищення його експлуатаційної надійності, зниження трудомісткості при виготовленні, підвищення точності позиціювання при регулюванні, тому що відсутні механічні деталі. При виготовленні такого привода істотно зменшуються витрати часу і знижується складність технологічних операцій. Знос складових його блоків і датчиків значно нижче, а точність виконання команд суттєво вище. Привід пристрою регулювання напруги силового трансформатора під навантаженням пояснюється кресленням, на якому наведена блок-схема привода, що заявляється. Привід пристрою регулювання напруги силового трансформатора під навантаженням містить вентильний електродвигун 1 з постійними магнітами, вихідний вал 2 якого безпосередньо з'єднаний із привідним валом 3 пристрої РПН (на кресленні не показаний). Привід містить також програмований логічний контролер 4, блок 5 силової комутації обмоток вентильного двигуна 1 з постійними магнітами, датчик 6 кута комутації обмоток вентильного двигуна 1, датчик 7 положення і швидкості вала вентильного двигуна 1, панель 8 управління, панель 9 індикації положення пристрою РПН, джерело 10 безперебійного живлення. Управління при 7 водом здійснюється в автономному режимі за допомогою панелі управління 8. Вихід джерела 10 безперебійного живлення з'єднаний з першим входом програмованого логічного контролера 4, другий вхід програмованого логічного контролера 4 з'єднаний з виходом панелі 8 управління, третій його вхід з'єднаний з виходом пристрою дистанційного управління приводом пристрою РПН, четвертий його вхід з'єднаний з першим виходом блока 5 силової комутації обмоток вентильного двигуна 1 з постійними магнітами, п'ятий його вхід з'єднаний з виходом датчика 6 кута комутації, шостий його вхід з'єднаний з виходом датчика 7 положення і швидкості, перший вихід програмованого логічного контролера 4 з'єднаний з першим входом блока 5 силової комутації, другий його вихід з'єднаний із входом панелі 9 індикації положення пристрою РПН, третій його вихід з'єднаний з входом пристрою дистанційного управління приводом пристрою РПН, другий вхід блока 5 силової комутації з'єднаний з джерелом напруги, третій його вхід з'єднаний з виходом датчика 6 кута комутації, четвертий його вхід з'єднаний з виходом датчика 7 положення і швидкості, другий його вихід з'єднаний з обмотками вентильного двигуна 1 з постійними магнітами, при цьому датчик 6 кута комутації і датчик 7 положення і швидкості розміщені на загальній осі з вентильним двигуном 1 з постійними магнітами. Привід пристрою регулювання напруги силового трансформатора під навантаженням працює таким чином. Після підключення першого входу програмованого логічного контролера 4 до джерела 10 безперебійного живлення і другого входу блока 5 силової комутації до джерела напруги від пристрою дистанційного управління приводом пристрою РПН на третій вхід програмованого логічного контролера 4 надходить команда виконати переключення n+1 або n-1, де n - поточне положення пристрою РПН, тобто перейти в наступне його положення або повернутися в попереднє. Програмований логічний контролер 4 контролює поточне положення пристрою РПН і порівнює його з отриманою командою. Якщо пристрій РПН не знаходиться в крайньому положенні, то з першого виходу програмованого логічного контролера 4 на перший вхід блока 5 силової комутації надходить команда виконати переключення. Блок 5 силової комутації відпрацьовує заданий режим переключення пристрою РПН і на його другому виході збуджуються фазні струми для управління обертанням вала вентильного двигуна 1. З виходу датчика 6 кута комутації на третій вхід блока 5 силової комутації надходить сигнал зворотного зв'язку для синхронізації моменту переключення фазних струмів вентильного двигуна. Одночасно з виходу датчика 7 положення і швидкості на четвертий вхід блока 5 силової комутації надходить сигнал про положення і швидкість вала вентильного двигуна 1. У блоці 5 силової комутації, що містить контур положення, контур швидкості і контур струму, здійснюється пропорційно-інтегральне регулювання, забезпечуючи задане переміщення за часом і положенням. Одночасно з виходу датчика 6 кута 94521 8 комутації надходить сигнал на п'ятий вхід програмованого логічного контролера 4, а з виходу датчика 7 положення і швидкості на шостий вхід програмованого логічного контролера 4. Програмований логічний контролер 4 здійснює по цих сигналах арифметично-логічний контроль позиціювання (переміщення) пристрою РПН і за результатами контролю, при необхідності, виробляє зі свого першого виходу на перший вхід блока 5 силової комутації коригувальні команди. З першого виходу блока 5 силової комутації на четвертий вхід програмованого логічного контролера 4 надходять сигнали про стан режиму переключення пристрою РПН, зокрема про величину струму, про поточне положенні пристрою РПН, про те, чи йде переключення в даний момент. З третього виходу програмованого логічного контролера 4 на вхід пристрою дистанційного управління приводом пристрою РПН надходять усі необхідні для контролю переключення сигнали, які можуть бути розширені до будь-якого цифрового стандарту, у тому числі і для систем моніторингу. З другого виходу програмованого логічного контролера 4 надходить сигнал про поточне положенні пристрою РПН на вхід панелі 9 індикації положення. Програмований логічний контролер 4 зберігає відомості про поточне положення пристрою РПН у флеш-пам'яті при зникненні живлення. З виходу панелі 8 управління на другий вхід програмованого логічного контролера 4 у ручному режимі подаються команди, аналогічні командам від пристрою дистанційного управління приводом пристрою РПН. Як видно з вищевикладеного, у приводі пристрою регулювання напруги силового трансформатора під навантаженням, що заявляється, забезпечується підвищення експлуатаційної надійності, зниження трудомісткості при виготовленні, підвищення точності позиціювання при регулюванні, тому що замість механічних деталей використовуються програмований логічний контролер 4, призначений для прийому керуючих сигналів від пристрою дистанційного управління приводом пристрою РПН, контролю поточного положення пристрою РПН, обробки і коректування стану переключення і передачі сигналів про положення, стан і режим привода у пристрій дистанційного управління приводом пристрою РПН, блок 5 силової комутації, що відпрацьовує заданий режим переключення пристрою РПН по положенню, швидкості переміщення і струму і контролюється програмованим логічним контролером 4, а також датчик 6 кута комутації, призначений для виміру положення ротора вентильного двигуна 1 щодо статора і визначення кута комутації фазних обмоток вентильного двигуна 1, датчик 7 положення і швидкості вала двигуна, призначений для виміру кутової швидкості обертання вала вентильного двигуна 1, визначення його положення і підрахунку кількості оборотів, що забезпечує високу точність позиціювання при переключенні. Використовуються також джерело 10 безперебійного живлення, що забезпечує безперебійну роботу привода, панель 9 індикації положення, що відображає дані про поточне положення пристрою РПН, панель 8 управління, призначена для подачі команд у ре 9 жимі ручного управління. При виготовленні такого привода суттєво зменшуються витрати часу і знижується складність технологічних операцій. Знос складових його блоків і датчиків значно нижче, а точність виконання команд суттєво вище. У приводі пристрою регулювання напруги силового трансформатора під навантаженням, що заявляється, використовується вентильний двигун 1 зі збудженням від постійних магнітів. В даний час цей тип електродвигунів є найбільш перспективним із застосовуваних у регульованих приводах малої і середньої потужності. До конструктивних і техніко-експлуатаційних переваг таких двигунів можна віднести те, що в них відсутні ковзні електричні контакти і вузли, які вимагають обслуговування, за рахунок чого підвищується їхній ресурс і надійність у порівнянні з двигунами постійного струму або асинхронними двигунами з явно вираженою обмоткою на роторі. Вентильні двигуни характеризуються великою перевантажувальною здатністю по моменту (короткочасно кратність максимального моменту дорівнює 5 і більше), а величина електромагнітного моменту, що при цьому розвивається, має лінійну залежність від струму навантаження, а отже, по величині струму можна визначати момент навантаження на валу пристрою РПН і в таким чином здійснювати моніторинг роботи пристрою РПН. Мінімальне значення струмів холостого ходу і робочих струмів у вентильному двигуні дозволяє досить точно вимірювати навантаження на привід і оптимізувати режим роботи. ККД вентильних двигунів перевищує 90% і мало змінюється при зміні навантаження по потужності і при коливаннях напруги живильної мережі (у асинхронних двигунів максимальний ККД складає не більш 86% і залежить від змін навантаження). Вентильні двигуни мають низький перегрів, за рахунок чого підвищується термін служби привода, тому що завдяки більш низьким температурам збільшується ресурс ізоляційних матеріалів. Відсутність у вентильному двигуні обмоток на роторі обумовлює відсутність тепловиділення ротором. Це дозволяє приводу працювати в нестандартних режимах з можливими перевантаженнями. Вентильні двигуни мають значний термін служби і високу надійність. Термін служби вентильного двигуна 94521 10 збільшується також за рахунок можливості оптимізації режимів роботи по швидкості і навантаженню. Вентильні двигуни мають мінімальні масогабаритні показники за інших рівних умов, більш просту схему перетворювача в порівнянні з асинхронними, а отже, вартість перетворювача при порівнянній потужності буде менше. Магнітна система вентильних двигунів складається з постійних магнітів і феромагнітних концентраторів, тому величина магнітної індукції в робочому зазорі таких двигунів може бути високою і навіть перевищувати величину залишкової магнітної індукції використовуваних постійних магнітів. Програмований логічний контролер 4 може бути виконаний на базі будь-якого РС-сумісного промислового контролера, наприклад ХР-8341 фірми ICPDAS, ARK-1370 фірми Advantech або індивідуальної розробки на мікроконтролерах фірм Atmel, РІС та ін. Блок 5 силової комутації може бути виконаний на базі цифрового привода, що призначений стежити, наприклад Xenus XTL фірми Сорlеу Control Corp., або інших виробників даного типу устаткування. Датчик 6 кута комутації може бути виконаний на оптичних елементах, на датчиках Холла або може бути використаний датчик, убудований у конструкцію вентильного двигуна 1. Як датчик 7 положення і швидкості вала двигуна може бути використаний енкодер, наприклад, ERN 120 фірми HEIDENHAIN або іншої. Як джерело 10 безперебійного живлення використовується промислове джерело безперебійного живлення, наприклад, фірми American-PowerConversion. Панель 8 управління і панель 9 індикації положення можуть бути виконані виносними, розміщеними на дверях шафи привода пристрою РПН, або інтегровані в програмований логічний контролер 4 і можуть бути вибрані від будь-якого виробника даного типу пристроїв. Привід пристрою РПН, що заявляється, може бути виготовлений на відомому устаткуванні і з використанням відомих матеріалів і засобів, що підтверджує його промислову придатність. 11 Комп’ютерна верстка Л. Ціхановська 94521 Підписне 12 Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive for a tap-changing under-load-device of a power transformer
Автори англійськоюHrebenikov Viktor Volodymyrovych, Katsalap Serhii Mykhailovych, Rassalskyi Oleksandr Mykolaiovych
Назва патенту російськоюПривод устройства регулирования напряжения силового трансформатора под нагрузкой
Автори російськоюГребеников Виктор Владимирович, Кацалап Сергей Михайлович, Рассальский Александр Николаевич
МПК / Мітки
МПК: H01H 21/00, H02P 13/00, H02P 3/00
Мітки: пристрою, силового, навантаженням, регулювання, трансформатора, напруги, привід
Код посилання
<a href="https://ua.patents.su/6-94521-privid-pristroyu-regulyuvannya-naprugi-silovogo-transformatora-pid-navantazhennyam.html" target="_blank" rel="follow" title="База патентів України">Привід пристрою регулювання напруги силового трансформатора під навантаженням</a>
Привід пристрою регулювання напруги силового трансформатора під навантаженням

Номер патенту: 51696
Опубліковано: 26.07.2010
Автори: Рассальський Олександр Миколайович, Кацалап Сергій Михайлович, Гребеніков Віктор Володимирович
МПК: H01H 21/00
Мітки: навантаженням, напруги, трансформатора, привід, силового, регулювання, пристрою
Формула / Реферат:
Привід пристрою регулювання напруги силового трансформатора під навантаженням, що містить електродвигун з вихідним валом, привідний вал пристрою регулювання, датчик положення, систему керування приводу пристрою регулювання під навантаженням, який відрізняється тим, що як електродвигун привід містить вентильний електродвигун з постійними магнітами, вихідний вал якого безпосередньо з'єднаний із привідним валом пристрою регулювання під...
Моторний привід пристрою регулювання під навантаженням силового трансформатора
Номер патенту: 45761
Опубліковано: 25.11.2009
Автори: Наній Віталій Вікторович, Хоменко Ігор Васильович
МПК: H02P 13/00, H01F 19/00
Мітки: силового, навантаженням, пристрою, привід, регулювання, трансформатора, моторний
Формула / Реферат:
Моторний привід пристрою регулювання під навантаженням силового трансформатора, що містить силовий перетворювач, пристрої електричного керування та індикації, а також корпус, який відрізняється тим, що як силовий перетворювач використовують високомоментний низькообертовий електродвигун.
Спосіб регулювання напруги силового трансформатора
Номер патенту: 27394
Опубліковано: 15.09.2000
Автори: Шафір Юрій Натанович, Цієр Гаррі Ізраїлович, Бікі Меньгерт Акошович
МПК: H02J 3/12
Мітки: регулювання, напруги, спосіб, трансформатора, силового
Текст:
...обмера) модели прототипа. Фиг. 6. Упрощенная схема испытаний (импульсного обмера) модели по изобретению. Фиг. 5, 6 служат для подтверждения достигаемого технического результата с помощью опытных данных. Обмотка трансформатора состоит из ветвей грубого регулирования: первая ветвь грубого регулирования 1 и вторая ветвь грубого регулирования 2 и ветви тонкого регулирования 3. Последняя подключена к устройству переключения 4,При...
Контактор пристрою регулювання напруги під навантаженням
Номер патенту: 16217
Опубліковано: 29.08.1997
Автори: Богданов Леонід Дмитриєвич, Вайнштейн Анатолій Львович, Моргунова Світлана Серафимовна, Сініцина Тамара Миколаєвна
МПК: H01F 21/12
Мітки: контактор, напруги, регулювання, навантаженням, пристрою
Формула / Реферат:
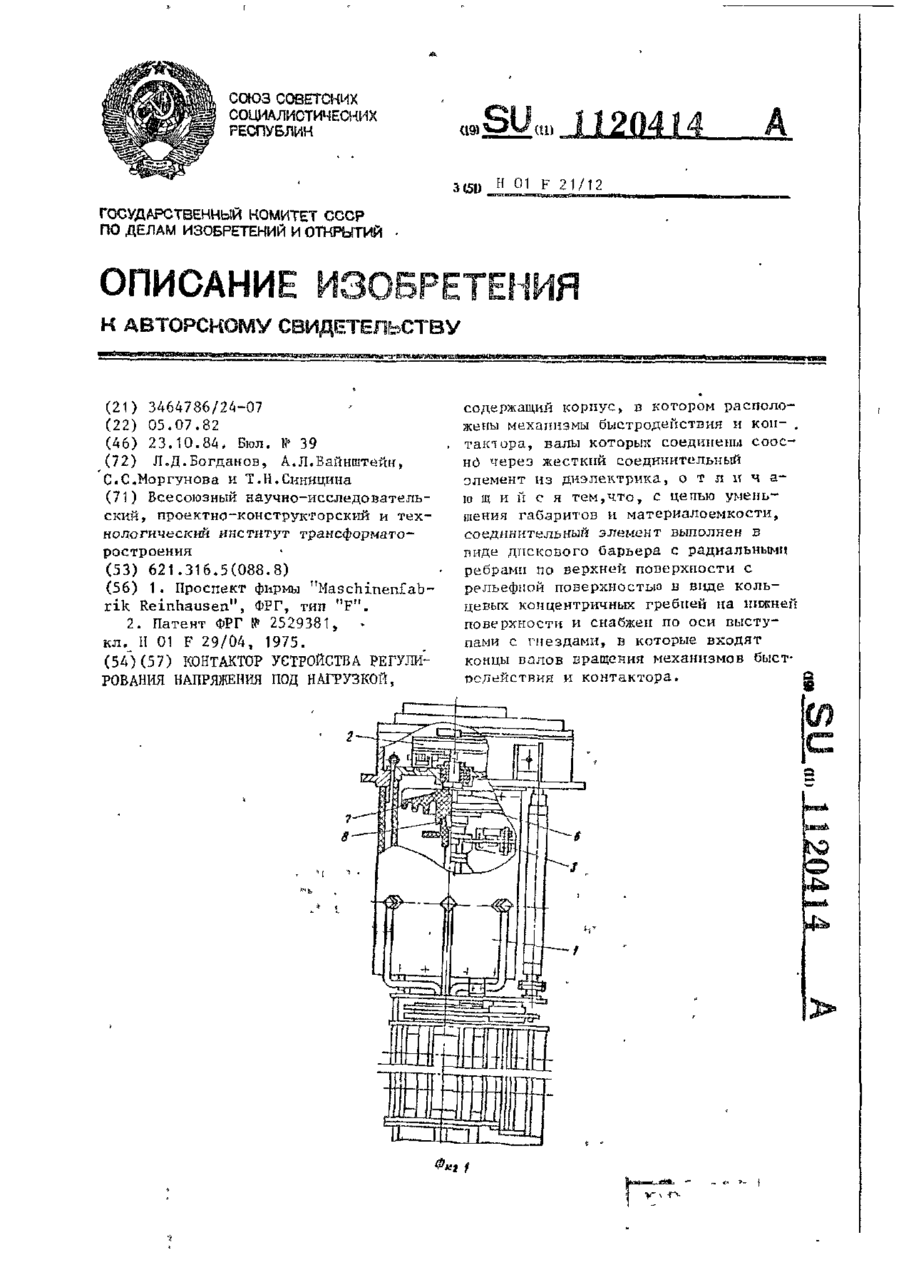
Контактор устройства регулирования напряжения под нагрузкой, содержащий корпус, в котором расположены механизмы быстродействия и контактора, валы которых соединены соосно через жесткий соединительный элемент из диэлектрика, отличающийся тем, что, с целью уменьшения габаритов и материалоемкости, соединительный элемент выполнен в виде дискового барьера с радиальными ребрами по верхней поверхности с рельефной поверхностью в виде кольцевых...
Пристрій захисту силового трансформатора з ізольованою нейтраллю і трансформатора напруги контролю ізоляції
Номер патенту: 15736
Опубліковано: 17.07.2006
Автори: Кошеленко Ніна Борисівна, Назаров Адольф Іванович, Андрієнко Олександр Миколайович, Журавльов Дмитро Володимирович
МПК: H02H 7/04
Мітки: ізольованою, напруги, захисту, ізоляції, контролю, пристрій, трансформатора, нейтраллю, силового
Формула / Реферат:
Пристрій захисту силового трансформатора з ізольованою нейтраллю і трансформатора напруги контролю ізоляції, що містить розрядник, що розташований в нейтралі, та комутаційний апарат, який відрізняється тим, що він додатково містить трансформатор струму в заземленій нейтралі високовольтної обмотки трансформатора напруги, до вторинної обмотки якого послідовно підключені блок захисту, блок керування та блок вмикання з виходом до ланцюга...
Попередній патент: Індикаторна пломба для метрологічних приладів
Наступний патент: Спосіб виготовлення безшовних чавунних або сталевих труб
Випадковий патент: Пристрій для складних інтубацій трахеї