Пристрій компенсації реактивного моменту несучого гвинта одногвинтового вертольота
Номер патенту: 94820
Опубліковано: 10.12.2014
Автори: Кузнецов Владлен Олександрович, Расстригін Олександр Олексійович, Шлапацький Вячеслав Олександрович, Комаров Володимир Олександрович, Башинський Володимир Георгійович

Формула / Реферат
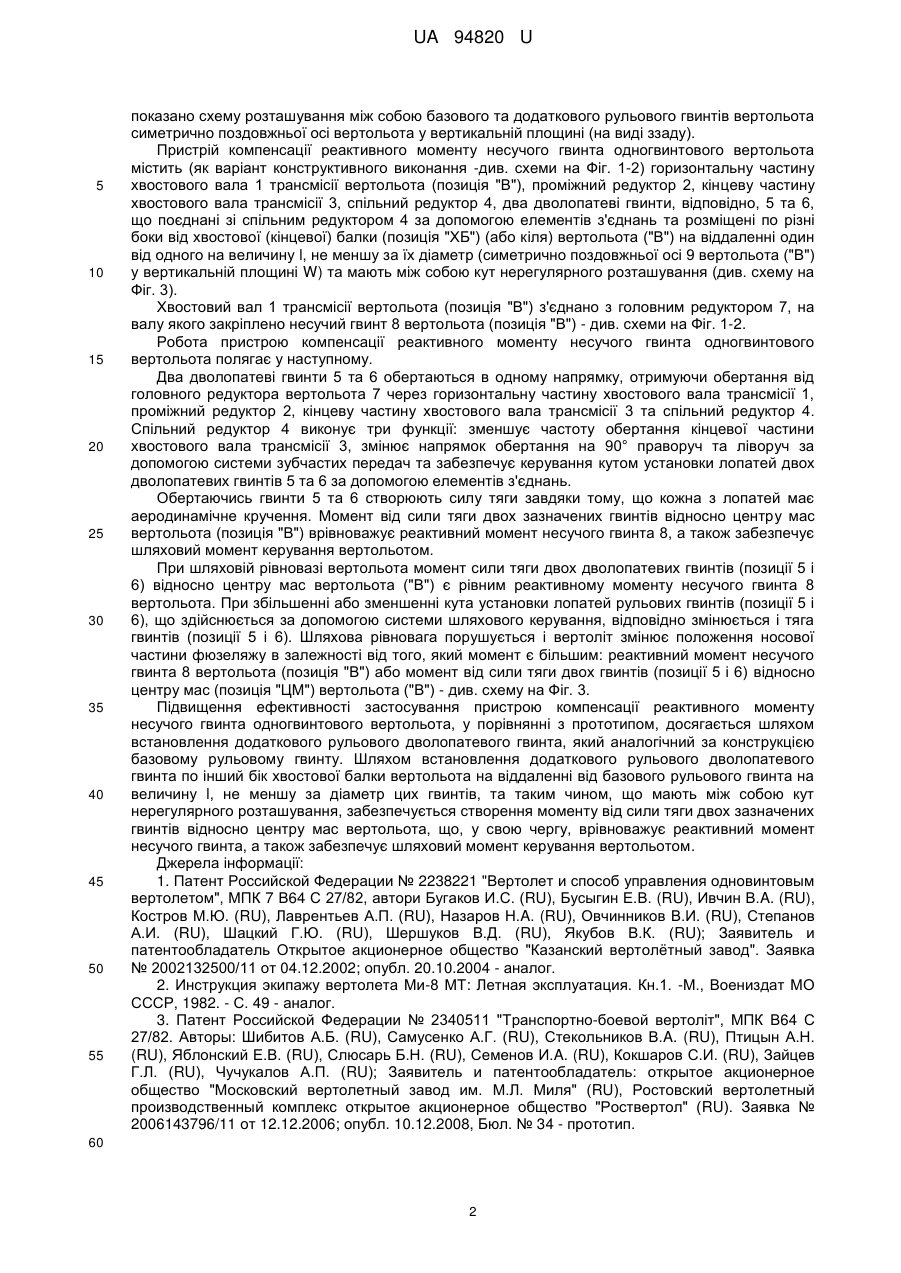
Пристрій компенсації реактивного моменту несучого гвинта одногвинтового вертольота, що містить горизонтальну частину хвостового вала трансмісії вертольота, проміжний редуктор, кінцеву частину хвостового вала трансмісії, хвостовий редуктор, а також рульовий гвинт, що виконано дволопатевим, розміщений по один бік від хвостової балки вертольота, який відрізняється тим, що до складу пристрою додатково введено другий рульовий гвинт, що виконано дволопатевим, при цьому додатковий рульовий гвинт розміщено по інший бік хвостової балки вертольота на віддаленні від базового рульового гвинта на величину, не меншу за їх діаметр та симетрично поздовжній осі вертольота у вертикальній площині, базовий та додатковий рульові гвинти поєднано зі спільним хвостовим редуктором за допомогою елементів з'єднань, причому базовий та додатковий рульові гвинти мають між собою кут нерегулярного розташування.
Текст
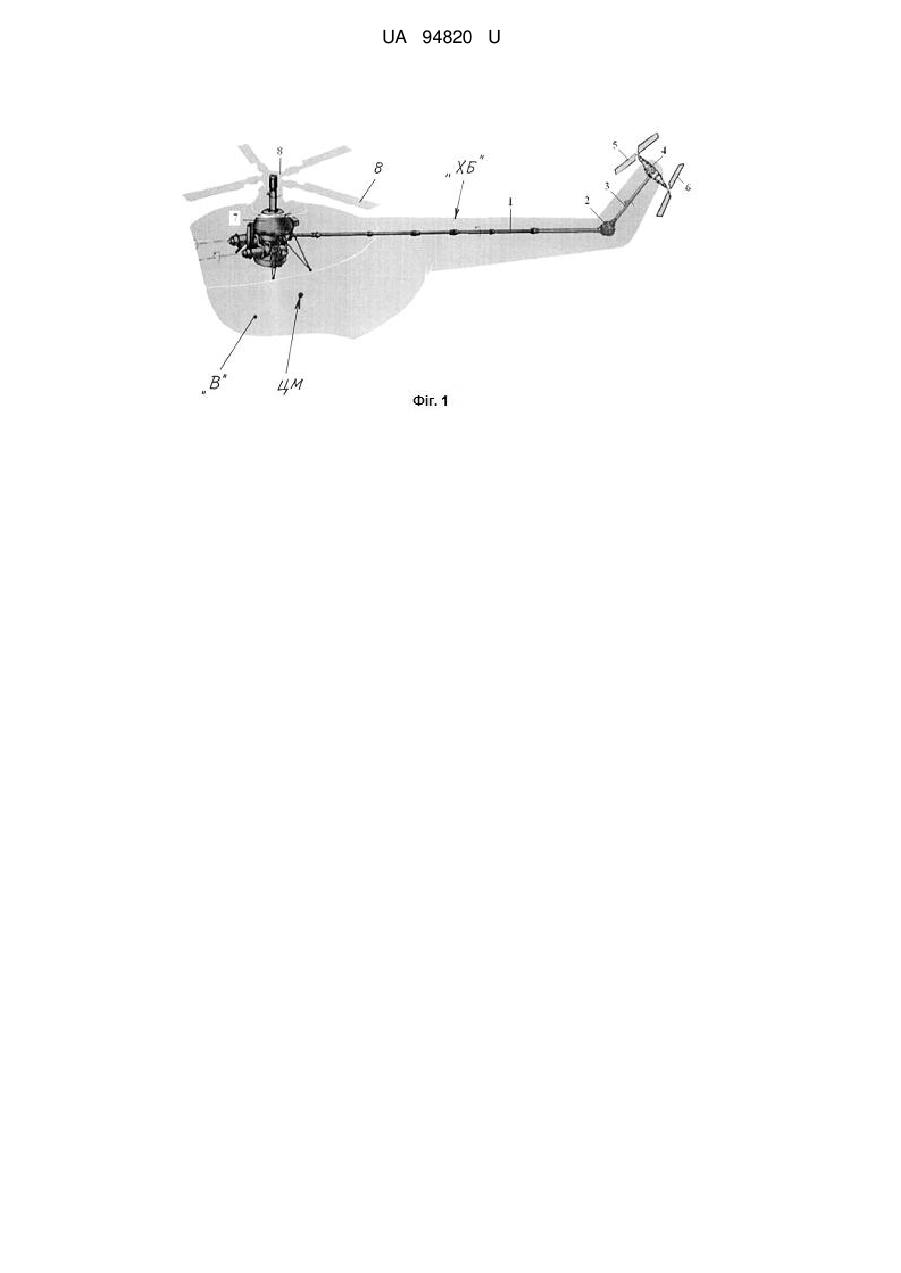
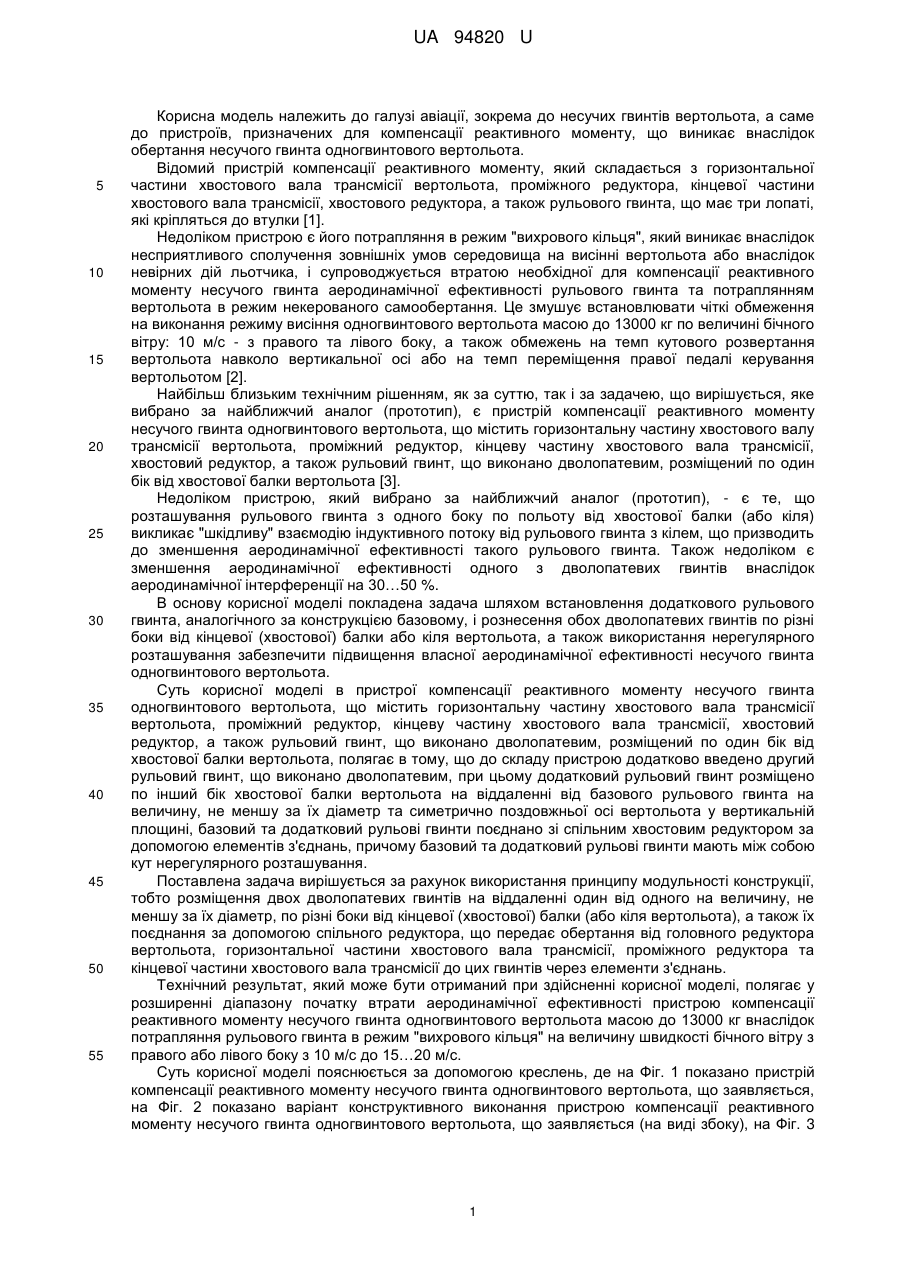
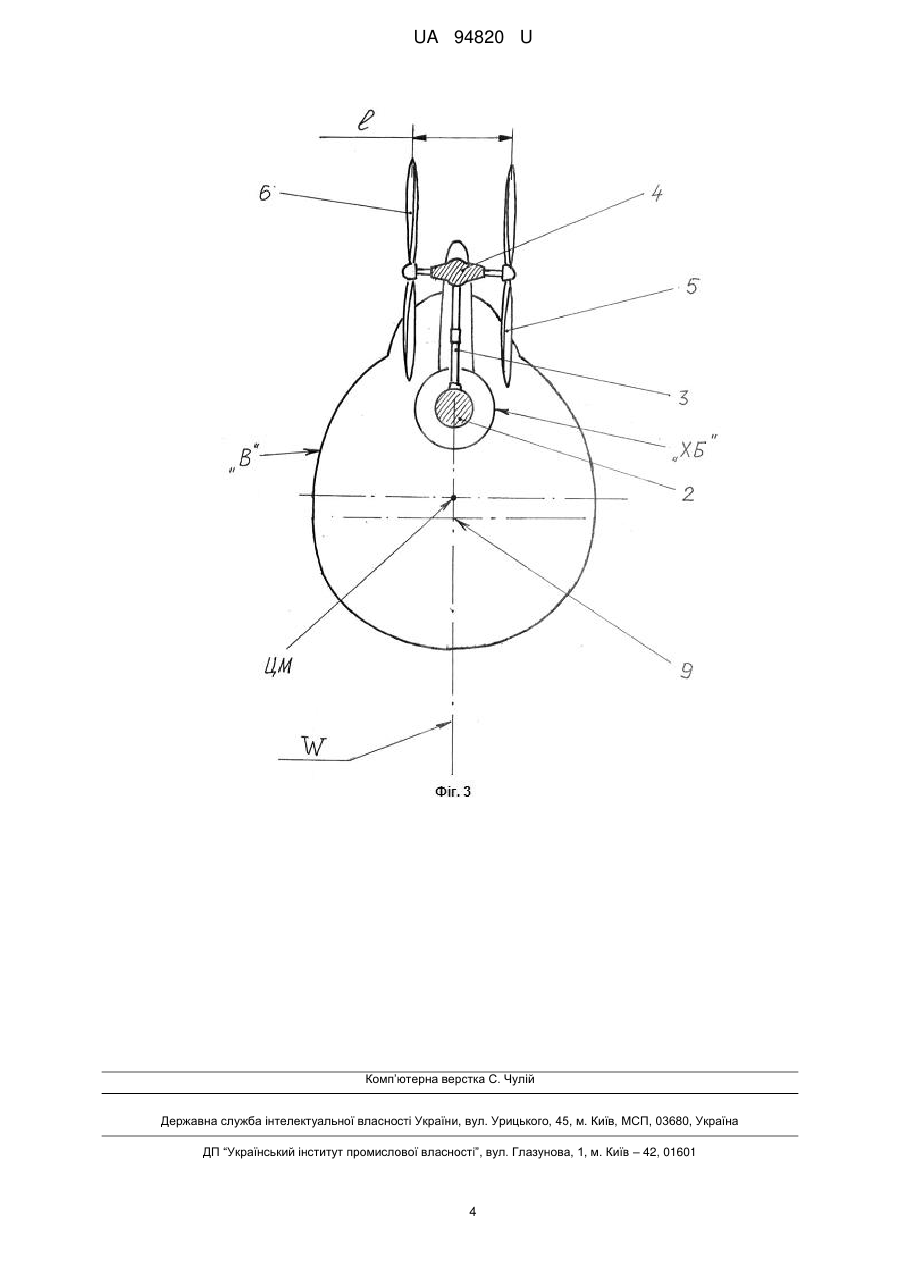
Реферат: Пристрій компенсації реактивного моменту несучого гвинта одногвинтового вертольота, що містить горизонтальну частину хвостового вала трансмісії вертольота, проміжний редуктор, кінцеву частину хвостового вала трансмісії, хвостовий редуктор, а також рульовий гвинт, що виконано дволопатевим, розміщений по один бік від хвостової балки вертольота. До складу пристрою додатково введено другий рульовий гвинт, що виконано дволопатевим, при цьому додатковий рульовий гвинт розміщено по інший бік хвостової балки вертольота на віддаленні від базового рульового гвинта на величину, не меншу за їх діаметр та симетрично поздовжній осі вертольота у вертикальній площині, базовий та додатковий рульові гвинти поєднано зі спільним хвостовим редуктором за допомогою елементів з'єднань, причому базовий та додатковий рульові гвинти мають між собою кут нерегулярного розташування. UA 94820 U (12) UA 94820 U UA 94820 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі авіації, зокрема до несучих гвинтів вертольота, а саме до пристроїв, призначених для компенсації реактивного моменту, що виникає внаслідок обертання несучого гвинта одногвинтового вертольота. Відомий пристрій компенсації реактивного моменту, який складається з горизонтальної частини хвостового вала трансмісії вертольота, проміжного редуктора, кінцевої частини хвостового вала трансмісії, хвостового редуктора, а також рульового гвинта, що має три лопаті, які кріпляться до втулки [1]. Недоліком пристрою є його потрапляння в режим "вихрового кільця", який виникає внаслідок несприятливого сполучення зовнішніх умов середовища на висінні вертольота або внаслідок невірних дій льотчика, і супроводжується втратою необхідної для компенсації реактивного моменту несучого гвинта аеродинамічної ефективності рульового гвинта та потраплянням вертольота в режим некерованого самообертання. Це змушує встановлювати чіткі обмеження на виконання режиму висіння одногвинтового вертольота масою до 13000 кг по величині бічного вітру: 10 м/с - з правого та лівого боку, а також обмежень на темп кутового розвертання вертольота навколо вертикальної осі або на темп переміщення правої педалі керування вертольотом [2]. Найбільш близьким технічним рішенням, як за суттю, так і за задачею, що вирішується, яке вибрано за найближчий аналог (прототип), є пристрій компенсації реактивного моменту несучого гвинта одногвинтового вертольота, що містить горизонтальну частину хвостового валу трансмісії вертольота, проміжний редуктор, кінцеву частину хвостового вала трансмісії, хвостовий редуктор, а також рульовий гвинт, що виконано дволопатевим, розміщений по один бік від хвостової балки вертольота [3]. Недоліком пристрою, який вибрано за найближчий аналог (прототип), - є те, що розташування рульового гвинта з одного боку по польоту від хвостової балки (або кіля) викликає "шкідливу" взаємодію індуктивного потоку від рульового гвинта з кілем, що призводить до зменшення аеродинамічної ефективності такого рульового гвинта. Також недоліком є зменшення аеродинамічної ефективності одного з дволопатевих гвинтів внаслідок аеродинамічної інтерференції на 30…50 %. В основу корисної моделі покладена задача шляхом встановлення додаткового рульового гвинта, аналогічного за конструкцією базовому, і рознесення обох дволопатевих гвинтів по різні боки від кінцевої (хвостової) балки або кіля вертольота, а також використання нерегулярного розташування забезпечити підвищення власної аеродинамічної ефективності несучого гвинта одногвинтового вертольота. Суть корисної моделі в пристрої компенсації реактивного моменту несучого гвинта одногвинтового вертольота, що містить горизонтальну частину хвостового вала трансмісії вертольота, проміжний редуктор, кінцеву частину хвостового вала трансмісії, хвостовий редуктор, а також рульовий гвинт, що виконано дволопатевим, розміщений по один бік від хвостової балки вертольота, полягає в тому, що до складу пристрою додатково введено другий рульовий гвинт, що виконано дволопатевим, при цьому додатковий рульовий гвинт розміщено по інший бік хвостової балки вертольота на віддаленні від базового рульового гвинта на величину, не меншу за їх діаметр та симетрично поздовжньої осі вертольота у вертикальній площині, базовий та додатковий рульові гвинти поєднано зі спільним хвостовим редуктором за допомогою елементів з'єднань, причому базовий та додатковий рульові гвинти мають між собою кут нерегулярного розташування. Поставлена задача вирішується за рахунок використання принципу модульності конструкції, тобто розміщення двох дволопатевих гвинтів на віддаленні один від одного на величину, не меншу за їх діаметр, по різні боки від кінцевої (хвостової) балки (або кіля вертольота), а також їх поєднання за допомогою спільного редуктора, що передає обертання від головного редуктора вертольота, горизонтальної частини хвостового вала трансмісії, проміжного редуктора та кінцевої частини хвостового вала трансмісії до цих гвинтів через елементи з'єднань. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у розширенні діапазону початку втрати аеродинамічної ефективності пристрою компенсації реактивного моменту несучого гвинта одногвинтового вертольота масою до 13000 кг внаслідок потрапляння рульового гвинта в режим "вихрового кільця" на величину швидкості бічного вітру з правого або лівого боку з 10 м/с до 15…20 м/с. Суть корисної моделі пояснюється за допомогою креслень, де на Фіг. 1 показано пристрій компенсації реактивного моменту несучого гвинта одногвинтового вертольота, що заявляється, на Фіг. 2 показано варіант конструктивного виконання пристрою компенсації реактивного моменту несучого гвинта одногвинтового вертольота, що заявляється (на виді збоку), на Фіг. 3 1 UA 94820 U 5 10 15 20 25 30 35 40 45 50 55 показано схему розташування між собою базового та додаткового рульового гвинтів вертольота симетрично поздовжньої осі вертольота у вертикальній площині (на виді ззаду). Пристрій компенсації реактивного моменту несучого гвинта одногвинтового вертольота містить (як варіант конструктивного виконання -див. схеми на Фіг. 1-2) горизонтальну частину хвостового вала 1 трансмісії вертольота (позиція "В"), проміжний редуктор 2, кінцеву частину хвостового вала трансмісії 3, спільний редуктор 4, два дволопатеві гвинти, відповідно, 5 та 6, що поєднані зі спільним редуктором 4 за допомогою елементів з'єднань та розміщені по різні боки від хвостової (кінцевої) балки (позиція "ХБ") (або кіля) вертольота ("В") на віддаленні один від одного на величину l, не меншу за їх діаметр (симетрично поздовжньої осі 9 вертольота ("В") у вертикальній площині W) та мають між собою кут нерегулярного розташування (див. схему на Фіг. 3). Хвостовий вал 1 трансмісії вертольота (позиція "В") з'єднано з головним редуктором 7, на валу якого закріплено несучий гвинт 8 вертольота (позиція "В") - див. схеми на Фіг. 1-2. Робота пристрою компенсації реактивного моменту несучого гвинта одногвинтового вертольота полягає у наступному. Два дволопатеві гвинти 5 та 6 обертаються в одному напрямку, отримуючи обертання від головного редуктора вертольота 7 через горизонтальну частину хвостового вала трансмісії 1, проміжний редуктор 2, кінцеву частину хвостового вала трансмісії 3 та спільний редуктор 4. Спільний редуктор 4 виконує три функції: зменшує частоту обертання кінцевої частини хвостового вала трансмісії 3, змінює напрямок обертання на 90° праворуч та ліворуч за допомогою системи зубчастих передач та забезпечує керування кутом установки лопатей двох дволопатевих гвинтів 5 та 6 за допомогою елементів з'єднань. Обертаючись гвинти 5 та 6 створюють силу тяги завдяки тому, що кожна з лопатей має аеродинамічне кручення. Момент від сили тяги двох зазначених гвинтів відносно центру мас вертольота (позиція "В") врівноважує реактивний момент несучого гвинта 8, а також забезпечує шляховий момент керування вертольотом. При шляховій рівновазі вертольота момент сили тяги двох дволопатевих гвинтів (позиції 5 і 6) відносно центру мас вертольота ("В") є рівним реактивному моменту несучого гвинта 8 вертольота. При збільшенні або зменшенні кута установки лопатей рульових гвинтів (позиції 5 і 6), що здійснюється за допомогою системи шляхового керування, відповідно змінюється і тяга гвинтів (позиції 5 і 6). Шляхова рівновага порушується і вертоліт змінює положення носової частини фюзеляжу в залежності від того, який момент є більшим: реактивний момент несучого гвинта 8 вертольота (позиція "В") або момент від сили тяги двох гвинтів (позиції 5 і 6) відносно центру мас (позиція "ЦМ") вертольота ("В") - див. схему на Фіг. 3. Підвищення ефективності застосування пристрою компенсації реактивного моменту несучого гвинта одногвинтового вертольота, у порівнянні з прототипом, досягається шляхом встановлення додаткового рульового дволопатевого гвинта, який аналогічний за конструкцією базовому рульовому гвинту. Шляхом встановлення додаткового рульового дволопатевого гвинта по інший бік хвостової балки вертольота на віддаленні від базового рульового гвинта на величину l, не меншу за діаметр цих гвинтів, та таким чином, що мають між собою кут нерегулярного розташування, забезпечується створення моменту від сили тяги двох зазначених гвинтів відносно центру мас вертольота, що, у свою чергу, врівноважує реактивний момент несучого гвинта, а також забезпечує шляховий момент керування вертольотом. Джерела інформації: 1. Патент Российской Федерации № 2238221 "Вертолет и способ управления одновинтовым вертолетом", МПК 7 В64 С 27/82, автори Бугаков И.С. (RU), Бусыгин Е.В. (RU), Ивчин В.A. (RU), Костров М.Ю. (RU), Лаврентьев А.П. (RU), Назаров Н.A. (RU), Овчинников В.И. (RU), Степанов А.И. (RU), Шацкий Г.Ю. (RU), Шершуков В.Д. (RU), Якубов В.К. (RU); Заявитель и патентообладатель Открытое акционерное общество "Казанский вертолётный завод". Заявка № 2002132500/11 от 04.12.2002; опубл. 20.10.2004 - аналог. 2. Инструкция экипажу вертолета Ми-8 МТ: Летная эксплуатация. Кн.1. -М., Воениздат МО СССР, 1982. - С. 49 - аналог. 3. Патент Российской Федерации № 2340511 "Транспортно-боевой вертоліт", МПК В64 С 27/82. Авторы: Шибитов А.Б. (RU), Самусенко А.Г. (RU), Стекольников В.A. (RU), Птицын А.Н. (RU), Яблонский Е.В. (RU), Слюсарь Б.Н. (RU), Семенов И.A. (RU), Кокшаров С.И. (RU), Зайцев Г.Л. (RU), Чучукалов А.П. (RU); Заявитель и патентообладатель: открытое акционерное общество "Московский вертолетный завод им. М.Л. Миля" (RU), Ростовский вертолетный производственный комплекс открытое акционерное общество "Роствертол" (RU). Заявка № 2006143796/11 от 12.12.2006; опубл. 10.12.2008, Бюл. № 34 - прототип. 60 2 UA 94820 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Пристрій компенсації реактивного моменту несучого гвинта одногвинтового вертольота, що містить горизонтальну частину хвостового вала трансмісії вертольота, проміжний редуктор, кінцеву частину хвостового вала трансмісії, хвостовий редуктор, а також рульовий гвинт, що виконано дволопатевим, розміщений по один бік від хвостової балки вертольота, який відрізняється тим, що до складу пристрою додатково введено другий рульовий гвинт, що виконано дволопатевим, при цьому додатковий рульовий гвинт розміщено по інший бік хвостової балки вертольота на віддаленні від базового рульового гвинта на величину, не меншу за їх діаметр та симетрично поздовжній осі вертольота у вертикальній площині, базовий та додатковий рульові гвинти поєднано зі спільним хвостовим редуктором за допомогою елементів з'єднань, причому базовий та додатковий рульові гвинти мають між собою кут нерегулярного розташування. 3 UA 94820 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюRasstryhin Oleksandr Oleksiiovych, Komarov Volodymyr Oleksandrovych, Bashynskyi Volodymyr Heorhiiovych, Kuznetsov Vladlen Oleksandrovych
Автори російськоюРасстригин Александр Алексеевич, Комаров Владимир Александрович, Башинский Владимир Георгиевич, Кузнецов Владлен Александрович
МПК / Мітки
МПК: B64C 27/82
Мітки: вертольота, одногвинтового, компенсації, несучого, пристрій, гвинта, реактивного, моменту
Код посилання
<a href="https://ua.patents.su/6-94820-pristrijj-kompensaci-reaktivnogo-momentu-nesuchogo-gvinta-odnogvintovogo-vertolota.html" target="_blank" rel="follow" title="База патентів України">Пристрій компенсації реактивного моменту несучого гвинта одногвинтового вертольота</a>
Лопатева система несучого гвинта вертольота
Номер патенту: 17310
Опубліковано: 15.09.2006
Автори: Гончарук Володимир Степанович, Казакевіч Андрєй Вячеслав, Чорний Анатолій Петрович, Казакевіч Аліна Вячеслав
МПК: B64C 27/32
Мітки: гвинта, лопатева, система, несучого, вертольота
Формула / Реферат:
1. Лопатева система несучого гвинта вертольота, що містить лопаті з пристроєм зниження напружень в них та прогину при роботі і величини звисання їх кінців при стоянні, яка відрізняється тим, що цей пристрій виконують у вигляді плоского кругового ободу, до якого закріплюють зовнішні кінці лопатей і який площиною розташовують у площині розташування лопатей.2. Лопатева система за п. 1, яка відрізняється тим, що зовнішні кінці лопатей...
Лопать несучого гвинта вертольота кт-112 “кадет”
Номер патенту: 34829
Опубліковано: 26.08.2008
Автор: Барінов Олексій Борисович
МПК: B64C 27/00, B64C 11/00
Мітки: кт-112, кадет, несучого, лопать, гвинта, вертольота
Формула / Реферат:
1. Лопать несучого гвинта вертольота, яка містить лонжерон, вузол кріплення лопаті до втулки несучого гвинта, окоренковий обтічник, кінцевий обтічник, протифлатерний вантаж, балансувальний вантаж, розміщений у кінцевому обтічнику, хвостовий відсік, обшивку, гумову і металеву антиабразивні накладки та гримерну пластину, розміщену на хвостовому відсіку, при цьому вузол кріплення лопаті до втулки несучого гвинта виконаний жорстко з'єднаним з...
Пристрій для визначення поля індуктивних швидкостей несучого гвинта в аеродинамічній трубі
Номер патенту: 52913
Опубліковано: 10.09.2010
Автори: Бондар Олександр Валентинович, Давидов Олександр Рубенович, Іщенко Сергій Олександрович
МПК: G01M 9/00
Мітки: швидкостей, гвинта, поля, аеродинамічний, пристрій, трубі, несучого, індуктивних, визначення
Формула / Реферат:
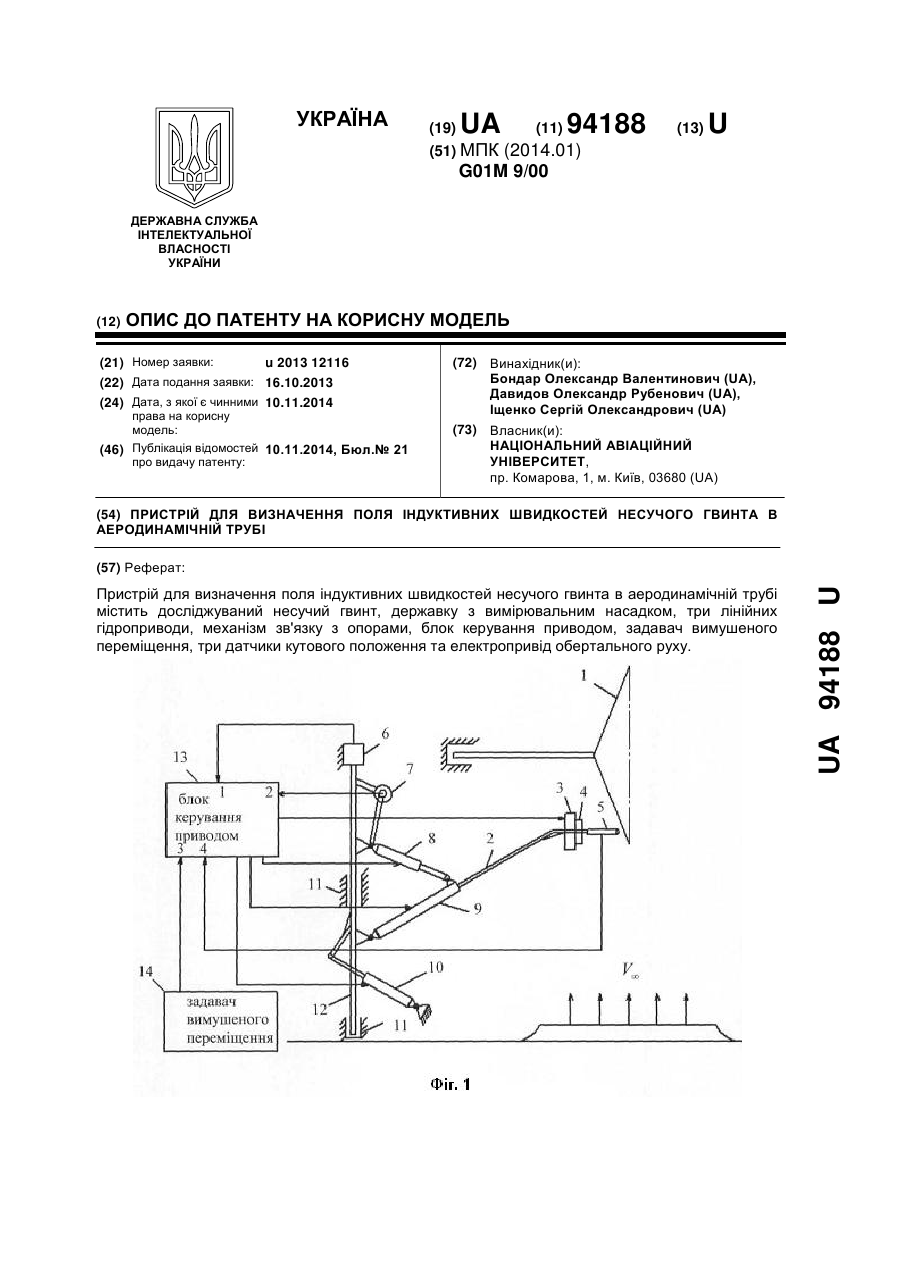
Пристрій для визначення поля індуктивних швидкостей несучого гвинта в аеродинамічній трубі, який містить в собі досліджуваний несучий гвинт, державку з вимірювальним насадком, два лінійних гідроприводи, механізм зв'язку з опорами, блок керування, задавач вимушеного переміщення, причому перший лінійний гідропривід забезпечує вертикальне переміщення державки, а другий лінійний гідропривід через механізм зв'язку забезпечує обертальний рух...
Пристрій для визначення поля індуктивних швидкостей несучого гвинта в аеродинамічній трубі
Номер патенту: 94188
Опубліковано: 10.11.2014
Автори: Давидов Олександр Рубенович, Іщенко Сергій Олександрович, Бондар Олександр Валентинович
МПК: G01M 9/00
Мітки: гвинта, поля, швидкостей, несучого, індуктивних, трубі, пристрій, визначення, аеродинамічний
Формула / Реферат:
Пристрій для визначення поля індуктивних швидкостей несучого гвинта в аеродинамічній трубі, який містить досліджуваний несучий гвинт, державку з вимірювальним насадком, три лінійних гідроприводи, механізм зв'язку з опорами, блок керування приводом, задавач вимушеного переміщення, два датчики кутового положення, причому перший лінійний гідропривід забезпечує вертикальне переміщення державки, другий лінійний гідропривід через механізм зв'язку...
Лопать деласа вітро-гідроенергетичної установки, повітряного/гребного або несучого гвинта
Номер патенту: 35755
Опубліковано: 10.10.2008
Автор: Делас Микола Іванович
МПК: B64C 27/32, B63H 5/00, B63H 20/00, B64C 11/00, B63H 1/14, B63H 7/00
Мітки: вітро-гідроенергетичної, лопать, гвинта, несучого, деласа, установки
Формула / Реферат:
1. Лопать вітро-гідроенергетичної установки, повітряного/гребного або несучого гвинта, що містить перо лопаті та вузол кріплення до вала силової установки, жорстко з'єднані між собою, при цьому перо лопаті містить передню крайку, задню крайку, окоренкову частину і закінцівку, перо лопаті виконано або цільним, або із з'єднаних жорстко між собою силових елементів, перо лопаті виконане або суцільним з дерева, металу, пластику, композиційних...
Попередній патент: Система візуалізації для навчання
Наступний патент: Світлодіодний модуль
Випадковий патент: Емульгатор для виробництва емульсійних вибухових речовин