Пристрій для визначення поля індуктивних швидкостей несучого гвинта в аеродинамічній трубі
Номер патенту: 94188
Опубліковано: 10.11.2014
Автори: Іщенко Сергій Олександрович, Давидов Олександр Рубенович, Бондар Олександр Валентинович

Формула / Реферат
Пристрій для визначення поля індуктивних швидкостей несучого гвинта в аеродинамічній трубі, який містить досліджуваний несучий гвинт, державку з вимірювальним насадком, три лінійних гідроприводи, механізм зв'язку з опорами, блок керування приводом, задавач вимушеного переміщення, два датчики кутового положення, причому перший лінійний гідропривід забезпечує вертикальне переміщення державки, другий лінійний гідропривід через механізм зв'язку забезпечує обертальний рух державки в площині розміщення гідроприводів, а третій лінійний гідропривід, котрий з'єднаний однією стороною, так само, як і перший гідропривід з механізмом зв'язку, а іншою стороною з'єднаний з корпусом аеродинамічної труби, причому керування всіма трьома гідроприводами здійснюється за допомогою блока керування, котрий першим та другим входом з'єднані з виходами датчиків кутового положення, що розташовані між механізмом зв'язку та першим гідроприводом, а також між механізмом зв'язку і корпусом аеродинамічної труби, а третім входом з'єднаний з задавачем вимушеного переміщення, який відрізняється тим, що додатково введені третій датчик кутового положення, електропривід обертального руху, котрий одним кінцем з'єднаний з державкою, а другим через датчик кутового положення з вимірювальним насадком, вихід котрого з'єднаний з четвертим входом блока керування приводом, а один з виходів блока керування приводом з'єднаний з входом керування електроприводу обертального руху.
Текст
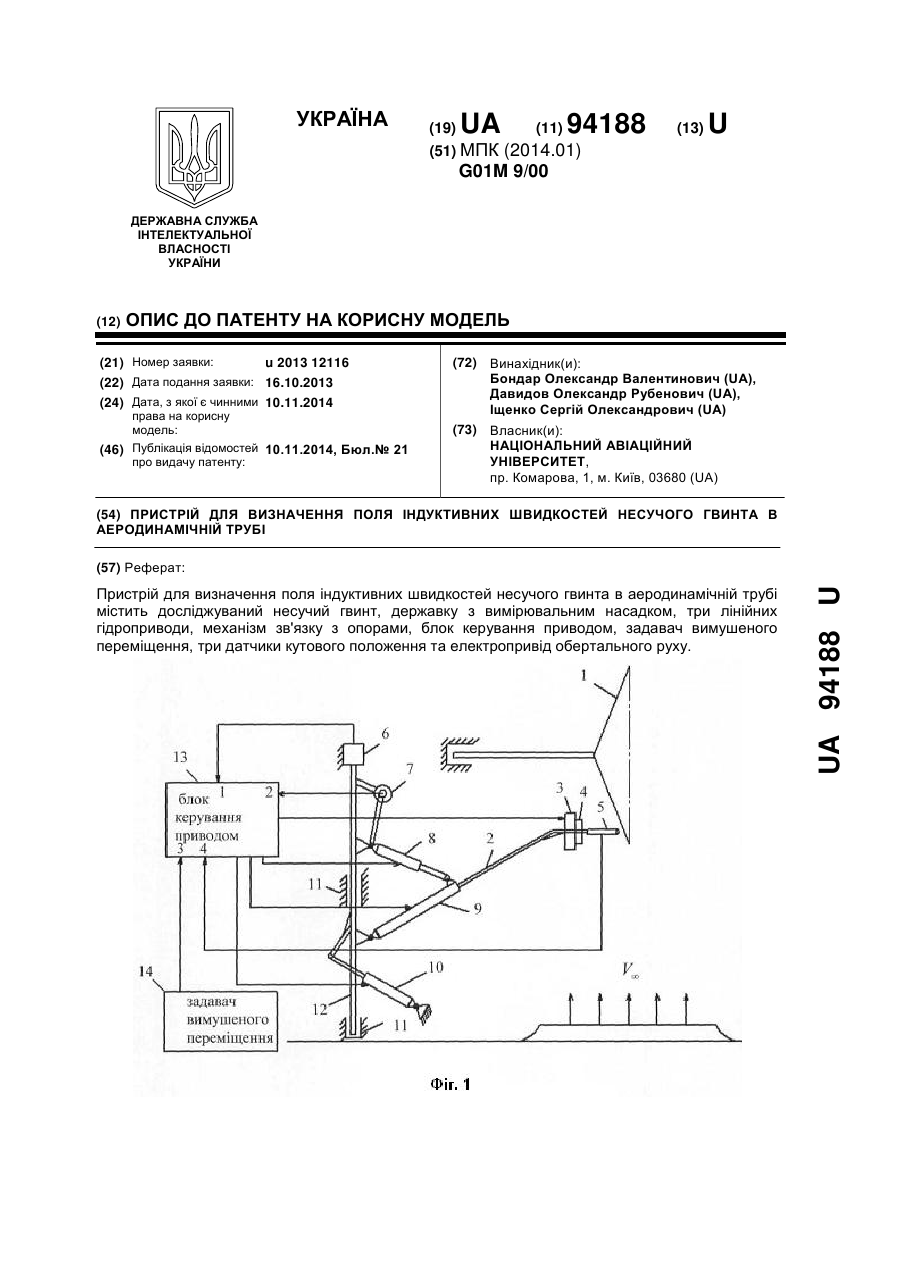
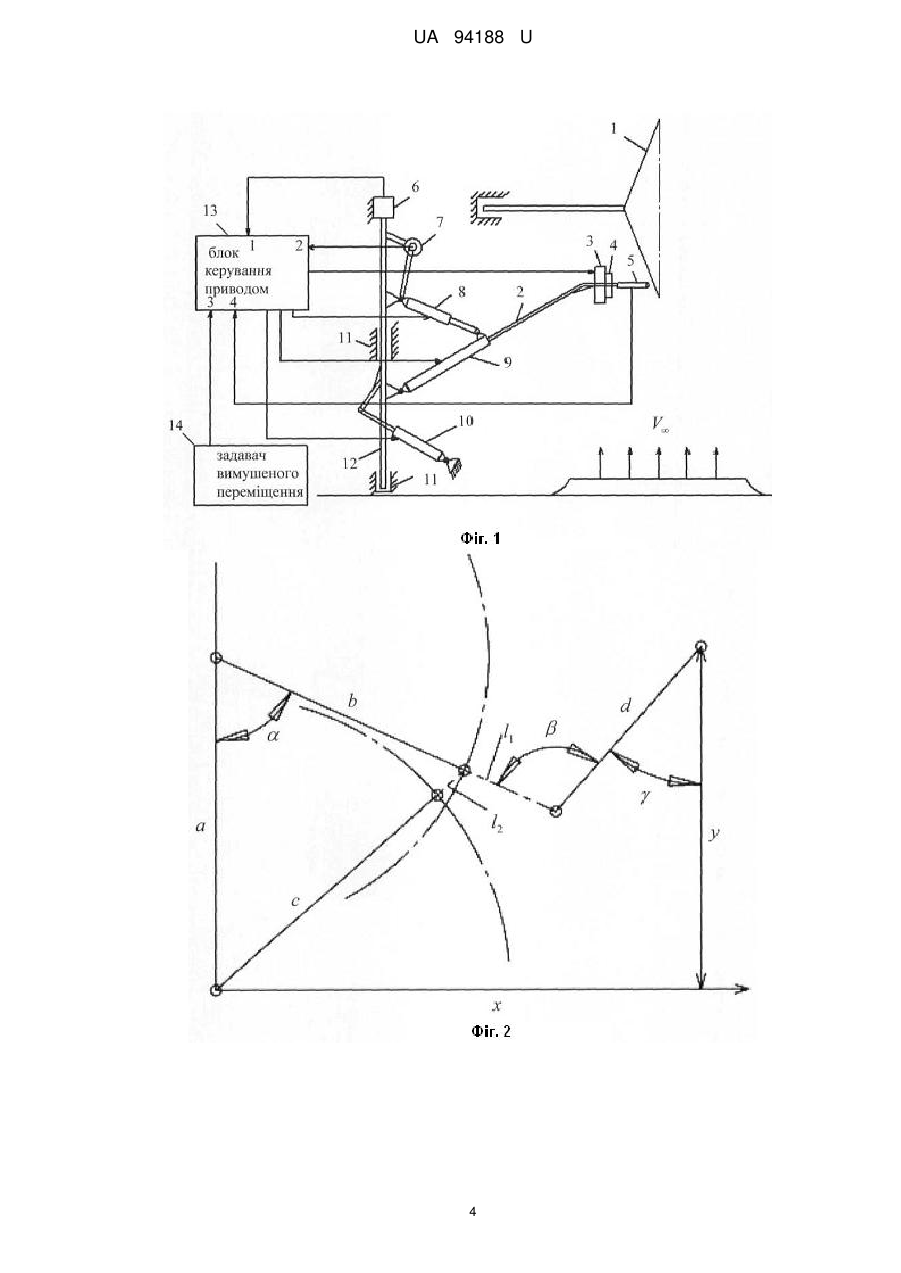
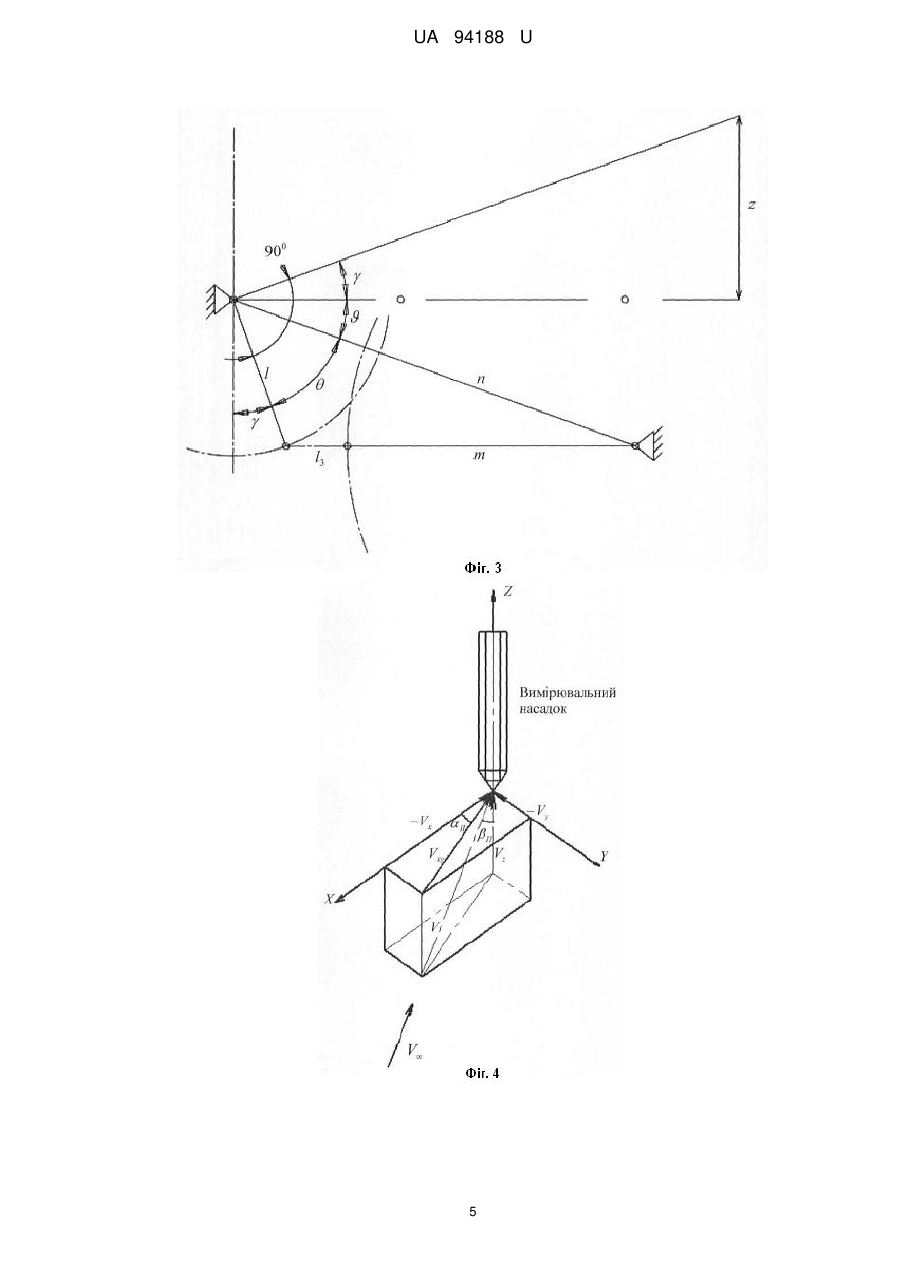
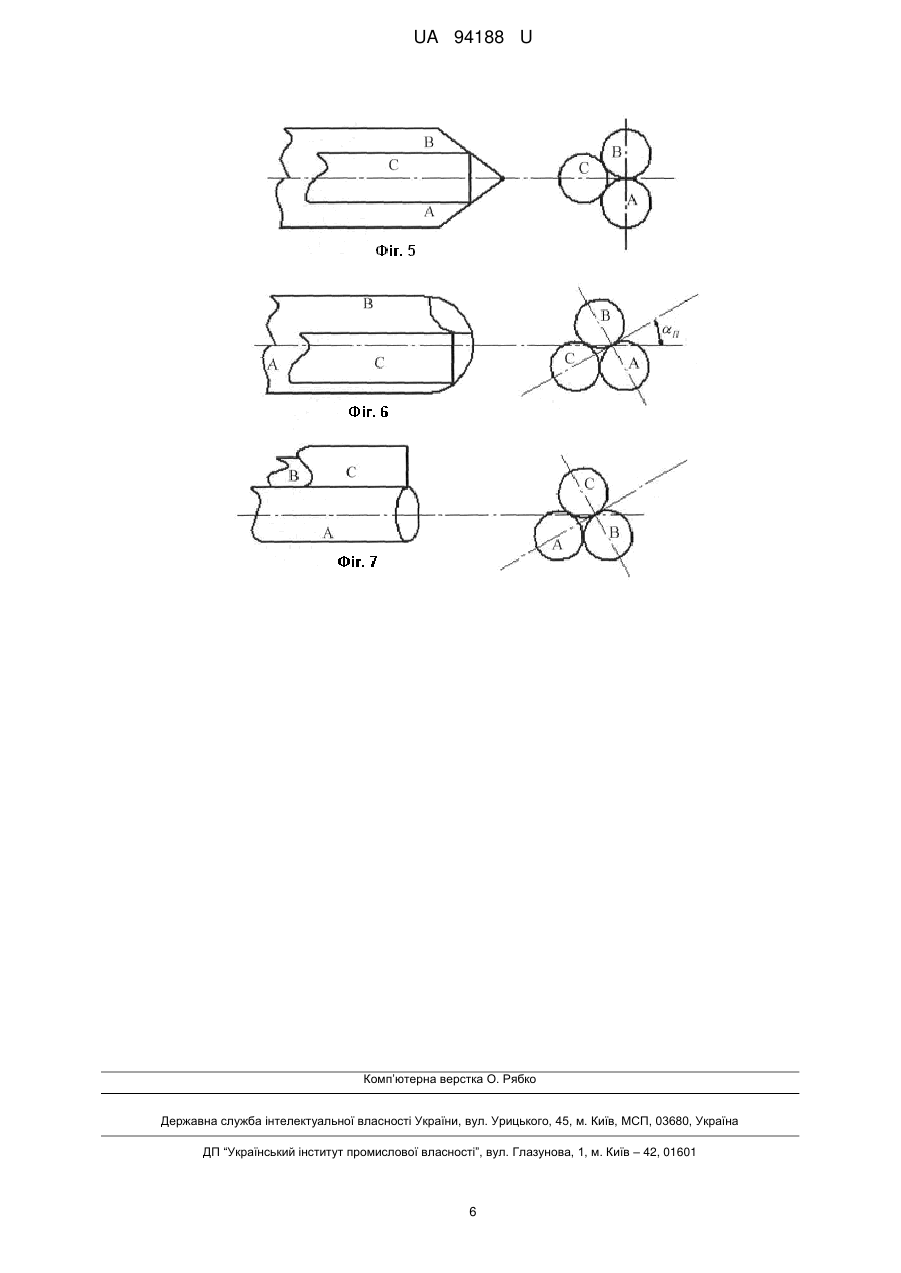
Реферат: UA 94188 U UA 94188 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі експериментальної аеродинаміки, зокрема до пристроїв, котрі призначені для визначення поля індуктивних швидкостей несучого гвинта при їх дослідженнях в аеродинамічних трубах. Відомий пристрій - динамічний маніпулятор для переміщення об'єкта, котрий розміщують в аеродинамічній трубі та складається з державки, двох лінійних гідроприводів, механізму зв'язку, блока керування, задавача вимушеного переміщення [1]. Недоліком розглянутого аналогу є відсутність можливості просторового заданого переміщення державки в робочому полі аеродинамічної труби. У аналогу маніпулятор використовується при оцінці впливу землі перед посадкою літального апарата. Найближчим технічним рішенням є пристрій для визначення поля індуктивних швидкостей несучого гвинта в аеродинамічній трубі, котрий містить досліджуваний несучий гвинт, державку з вимірювальним насадком, три лінійних гідроприводи, механізм зв'язку з опорами, блок керування, задавач вимушеного переміщення, два датчики кутового положення [2]. Дослідження поля індуктивних швидкостей несучого гвинта вимагає окрім наявності керованого та контрольованого переміщення державки з вимірювальним насадком вздовж поздовжньої і бічних осей повітряного потоку, також керований просторовий обертальний рух, що не передбачено в пристрої прототипу. Відома схема прототипу володіє низькою чутливістю до скосів повітряного потоку. При скосах повітряного потоку 10° похибки вимірювання параметрів потоку досягають 10 % та з збільшенням відхилення повздовжньої осі державки з вимірювальним насадком від осі повітряного потоку в точці вимірювання зростають. Також за наявності завихрень потоку несучого гвинта потрібна локалізація вимірювань в точці, що не вдається отримати при п'яти точковому вимірювальному насадку. Обмеження пов'язане з мінімальним діаметром вимірювального насадку D min 6,5 мм [3]. В основу корисної моделі поставлено задачу удосконалити такий пристрій для визначення поля індуктивних швидкостей несучого гвинта в аеродинамічних трубах, в якому нове виконання схеми пристрою, а саме додатково введений датчик кутового положення, електропривід обертального руху, котрий одним кінцем з'єднаний з державкою, а другим через датчик кутового положення з вимірювальним насадком, вихід котрого з'єднаний з четвертим входом блока керування приводом, а один з виходів блока керування приводом з'єднаний з входом керування електроприводу обертального руху, що дозволило забезпечити розширення діапазону кутів та підвищити точність проведення експериментів для визначення поля індуктивних швидкостей несучого гвинта при їх дослідженнях в аеродинамічних трубах. Поставлена задача вирішується тим, що пристрій для визначення поля індуктивних швидкостей несучого гвинта в аеродинамічній трубі містить досліджуваний несучий гвинт, державку з вимірювальним насадком, три лінійних гідроприводи, механізм зв'язку з опорами, блок керування приводом, задавач вимушеного переміщення, два датчики кутового положення, причому перший лінійний гідропривід забезпечує вертикальне переміщення державки, другий лінійний гідропривід через механізм зв'язку забезпечує обертальний рух державки в площині розміщення гідроприводів, а третій лінійний гідропривід, котрий з'єднаний однією стороною, так само, як і перший гідропривід з механізмом зв'язку, а іншою стороною з'єднаний з корпусом аеродинамічної труби, причому керування всіма трьома гідроприводами здійснюється за допомогою блока керування, котрий першим та другим входом з'єднані з виходами датчиків кутового положення, що розташовані між механізмом зв'язку та першим гідроприводом, а також між механізмом зв'язку і корпусом аеродинамічної труби, а третім входом з'єднаний з задавачем вимушеного переміщення, згідно з винаходом додатково введені третій датчик кутового положення, електропривід обертального руху, котрий одним кінцем з'єднаний з державкою, а другим через датчик кутового положення з вимірювальним насадком, вихід котрого з'єднаний з четвертим входом блока керування приводом, а один з виходів блока керування приводом з'єднаний з входом керування електроприводу обертального руху. На фігурі 1 наведено схему пристрою для визначення поля індуктивних швидкостей несучого гвинта в аеродинамічній трубі. На фігурі 2 наведено кінематичну схему взаємодії лінійних гідроприводів з механізмом зв'язку у вертикальній площині. На фігурі 3 наведено кінематичну схему взаємодії лінійних гідроприводів з механізмом зв'язку в горизонтальній площині. На фігурі 4 наведено схему орієнтації повітря потоку відносно вимірювального насадку в досліджуваному перетині простору аеродинамічної труби. На фігурі 5-7 наведено схему зміни орієнтації вимірювального насадку щодо вектора швидкості потоку для вимірювання двох кутів скосу потоку п і п . 1 UA 94188 U 5 10 15 Пристрій (Фіг. 1) містить досліджуваний несучий гвинт 1, державку 2, електропривід обертального руху 3, датчики кутового положення 4,6,7, вимірювальний насадок 5, лінійні гідроприводи 8,9,10, опори 11, механізм зв'язку 12 блок керування приводом 13, задавач вимушеного переміщення 14. Пристрій працює наступним чином. Несучий гвинт 1 розміщується в повітряному потоці, що набігає V . При дослідженні поля індуктивних швидкостей несучого гвинта 1 від задавача вимушеного переміщення 14 по лінійним степеням вільності X, Y,Z задається сигнал, котрий після перетворення в блоці 13 забезпечує лінійне переміщення державки 2 вздовж відповідного ступеня вільності спільним переміщенням всіх трьох лінійних гідроприводів 8,9,10. Керуючі сигнали для блока керування приводом 13 формуються від датчиків кутового положення 6,7. Датчик 6 вимірює кут повороту механізму зв'язку 12 в горизонтальній площині, котрий обумовлений переміщенням лінійного гідроприводу 10. Датчик 7 вимірює кут повороту лінійного гідроприводу 8 у вертикальній площині. Механізм зв'язку 12 вільно повертається відносно вертикальної осі в опорах 11. Сигнали керування переміщенням гідроприводів 8,9 у вертикальній площині формуються в блоці керування приводом 13 від задавача вимушеного переміщення 14 у такий спосіб. В задавачі вимушеного переміщення 14 формується величина переміщення по X або Y. При цьому необхідне переміщення гідроприводів 8, 9 наступне (Фіг. 2): l1 20 l1 b2 a 2 2 a b cos( ) c , де 25 30 l1 - лінійне переміщення гідроприводу 8; l 2 - лінійне переміщення гідроприводу 9; x, y - необхідні координати положення державки 2 в повітряному потоці вздовж осей X і Y; d - довжина штанги, на якій кріпиться державка 2; b, c - постійні розміри гідроприводу 8, 9; a - відстань між нерухомими точками кріплення гідроприводів 8, 9; - кут між вертикальною віссю механізму зв'язку 12 і повздовжньою віссю гідроприводу 9; - кут, під яким нерухомо встановлюється штанга відносно повздовжньої осі гідроприводу. Кут визначається за наступним виразом: arcsin(w) w 35 40 45 x d sin( ) b sin( ) ( y ) d sin( ) d 2 sin 2 ( ) ( y a) 2 y 2 ( y a) . Таким чином, задавши величину переміщення по координатах X i Y, легко обчислити керовані переміщення l1 та l 2 гідроприводів. Сигнали керування переміщенням гідроприводів в горизонтальній площині формуються в блоці керування 13 від задавача вимушеного переміщення 14 наступним чином (Фіг. 3). В задавачу 14 формується величина бічного переміщення по осі Z. При цьому необхідне переміщення гідроприводу 10: l 3 l 2 n 2 2 l n cos(90 ) m , де l - довжина горизонтальної штанги механізму зв'язку 12; n - відстань між вертикальною віссю механізму зв'язку 12 та точкою шарнірного кріплення гідроприводу 10; m - постійні розміри гідроприводу 10; - постійний кут між віссю X та перпендикуляром, проведеного з точки шарнірного кріплення гідроприводу 10, на вертикальну вісь механізму зв'язку 12; - кут між віссю z та горизонтальною штангою механізму зв'язку 12. Кут визначається за наступним виразом: z . d 2 (b l1 ) 2 2 d (b l1 ) cos( ) arcin 2 UA 94188 U Задавши величину бічного переміщення z , обчислимо через відомі величини кут 5 15 20 25 30 35 40 45 50 та знайдене необхідне переміщення l 3 гідроприводу 10. Блок керування приводом 13 може бути реалізований на будь-якому процесорі, де по величинах X, Y, Z розраховуються необхідні переміщення гідроприводів 8, 9, 10. При використанні гідроприводів з ходом ±0,5 м, розмірі а=1,5 м можна досягти переміщення X=0,5 м, Y=0,95 м. Після визначення в просторі координат точки повітряного потоку (X, Y) визначаються величини кутів скосу потоку п і п у точці (Фіг. 4) Зміна орієнтації вимірювального насадку 5, відносно вектору швидкості повітряного потоку, для вимірювання двох кутів 10 п и п у точці, здійснюється наступним чином (Фіг. 5-7). Вихідне положення вимірювального насадку 5 показано на рисунку (Фіг. 5). Спочатку вимірювальний насадок 5 використовується для вимірювання кута п . Для цього вимірювальний насадок 5 повертається електроприводом обертального руху 3 відносно повздовжньої осі до тих пір, поки тиск, що реєструється трубками А і В, не стане рівним. У цьому положенні трубки А і В розташовуються симетрично відносно площини, в якій знаходиться вектор швидкості потоку V, показано на рисунку (Фіг. 6). Кут п визначається за показниками датчика кута 4. Потім вимірювальний насадок 5 повертається на 90° електроприводом обертального руху 3, показано на рисунку (Фіг. 7). У цьому положенні вектор швидкості потоку V лежить в площині, котра проходить через осі трубок А і В. Далі проводиться реєстрація значень тиску, по всіх трьох трубках. За градуювальними залежностями вимірювального насадку 5 визначається кут п та величина вектора швидкості V. Мінімальний діаметр вимірювального насадку D min> 3,2 мм [3]. Пристрій дозволить значно розширити обсяг аеродинамічних трубних експериментів при дослідженні несучих гвинтів автожирів і вертольотів з урахуванням місцевих вихроутворень, що дає можливість збільшити науково-технічній ефект при таких дослідженнях. Джерела інформації: 1. Patent US № 5 345 818, WIND DRIVEN DYNAMIC MANIPULATOR FOR A WIND TUNNEL/ US Cl. 73-147, Int. Cl. G01M9/00, Jim. 1993. (аналог) 2. Патент на корисну модель № 52913, ПРИСТРІЙ ДЛЯ ВИЗНАЧЕННЯ ПОЛЯ ІНДУКТИВНИХ ШВИДКОСТЕЙ НЕСУЧОГО ГВИНТА В АЕРОДИНАМІЧНІЙ ТРУБІ/ UA МПК G01М9/00, Б.И. №17, 10.09.2010. (прототип) 3. Приемники для определения параметров потока в аэродинамических трубах. Обзор ЦАГИ, № 612, 1982. - С. 66-68. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Пристрій для визначення поля індуктивних швидкостей несучого гвинта в аеродинамічній трубі, який містить досліджуваний несучий гвинт, державку з вимірювальним насадком, три лінійних гідроприводи, механізм зв'язку з опорами, блок керування приводом, задавач вимушеного переміщення, два датчики кутового положення, причому перший лінійний гідропривід забезпечує вертикальне переміщення державки, другий лінійний гідропривід через механізм зв'язку забезпечує обертальний рух державки в площині розміщення гідроприводів, а третій лінійний гідропривід, котрий з'єднаний однією стороною, так само, як і перший гідропривід з механізмом зв'язку, а іншою стороною з'єднаний з корпусом аеродинамічної труби, причому керування всіма трьома гідроприводами здійснюється за допомогою блока керування, котрий першим та другим входом з'єднані з виходами датчиків кутового положення, що розташовані між механізмом зв'язку та першим гідроприводом, а також між механізмом зв'язку і корпусом аеродинамічної труби, а третім входом з'єднаний з задавачем вимушеного переміщення, який відрізняється тим, що додатково введені третій датчик кутового положення, електропривід обертального руху, котрий одним кінцем з'єднаний з державкою, а другим через датчик кутового положення з вимірювальним насадком, вихід котрого з'єднаний з четвертим входом блока керування приводом, а один з виходів блока керування приводом з'єднаний з входом керування електроприводу обертального руху. 3 UA 94188 U 4 UA 94188 U 5 UA 94188 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюBondar Oleksandr Valentynovych, Davydov Oleksandr Rubenovych, Ischenko Serhii Oleksandrovych
Автори російськоюБондарь Александр Валентинович, Давыдов Александр Рубенович, Ищенко Сергей Александрович
МПК / Мітки
МПК: G01M 9/00
Мітки: несучого, швидкостей, гвинта, пристрій, аеродинамічний, поля, трубі, визначення, індуктивних
Код посилання
<a href="https://ua.patents.su/8-94188-pristrijj-dlya-viznachennya-polya-induktivnikh-shvidkostejj-nesuchogo-gvinta-v-aerodinamichnijj-trubi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення поля індуктивних швидкостей несучого гвинта в аеродинамічній трубі</a>
Пристрій для визначення поля індуктивних швидкостей несучого гвинта в аеродинамічній трубі
Номер патенту: 52913
Опубліковано: 10.09.2010
Автори: Іщенко Сергій Олександрович, Давидов Олександр Рубенович, Бондар Олександр Валентинович
МПК: G01M 9/00
Мітки: гвинта, швидкостей, аеродинамічний, пристрій, поля, несучого, визначення, індуктивних, трубі
Формула / Реферат:
Пристрій для визначення поля індуктивних швидкостей несучого гвинта в аеродинамічній трубі, який містить в собі досліджуваний несучий гвинт, державку з вимірювальним насадком, два лінійних гідроприводи, механізм зв'язку з опорами, блок керування, задавач вимушеного переміщення, причому перший лінійний гідропривід забезпечує вертикальне переміщення державки, а другий лінійний гідропривід через механізм зв'язку забезпечує обертальний рух...
Пристрій для визначення обертальних похідних моделей в аеродинамічній трубі

Номер патенту: 67661
Опубліковано: 15.06.2004
Автори: Іщенко Сергій Олександрович, Давидов Олександр Рубенович, Жила Володимир Гаврилович
Мітки: трубі, пристрій, аеродинамічний, моделей, визначення, обертальних, похідних
Формула / Реферат:
1. Пристрій для визначення обертальних похідних моделей в аеродинамічній трубі, що містить електропривід з муфтою, маховик, кривошипно-шатунний механізм, а також державку з закріпленою на ній моделлю, який відрізняється тим, що державка з'єднана з шатуном через два послідовно з'єднані за допомогою гнучкого зв'язку профільовані шківи.2. Пристрій за п. 1, який відрізняється тим, що перший шків з'єднаний із шатуном і має кривизну...
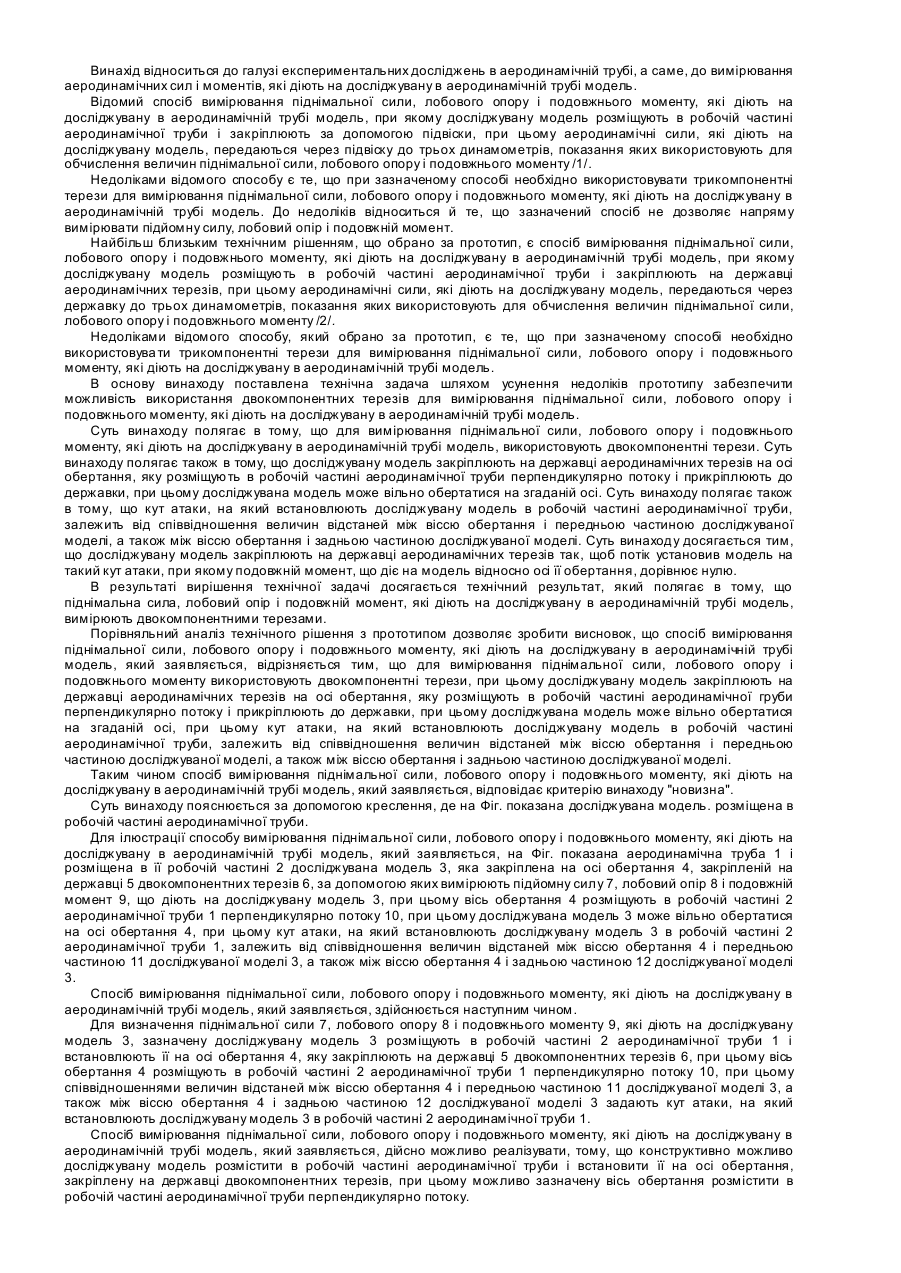
Спосіб вимірювання піднімальної сили, лобового опору і подовжнього моменту, які діють на досліджувану в аеродинамічній трубі модель
Номер патенту: 72076
Опубліковано: 17.01.2005
Автор: Дихановський Віктор Миколайович
МПК: G01L 21/00, G01L 5/00
Мітки: трубі, вимірювання, лобового, моменту, піднімальної, досліджувану, діють, опору, аеродинамічний, спосіб, подовжнього, сили, модель
Формула / Реферат:
1. Спосіб вимірювання піднімальної сили, лобового опору і подовжнього моменту, які діють на досліджувану в аеродинамічній трубі модель, при якому досліджувану модель розміщують в робочій частині аеродинамічної труби і закріплюють на державці аеродинамічних терезів, який відрізняється тим, що для вимірювання піднімальної сили, лобового опору і подовжнього моменту використовують двокомпонентні терези.2. Спосіб вимірювання піднімальної...
Лопатева система несучого гвинта вертольота
Номер патенту: 17310
Опубліковано: 15.09.2006
Автори: Казакевіч Аліна Вячеслав, Гончарук Володимир Степанович, Чорний Анатолій Петрович, Казакевіч Андрєй Вячеслав
МПК: B64C 27/32
Мітки: лопатева, вертольота, несучого, гвинта, система
Формула / Реферат:
1. Лопатева система несучого гвинта вертольота, що містить лопаті з пристроєм зниження напружень в них та прогину при роботі і величини звисання їх кінців при стоянні, яка відрізняється тим, що цей пристрій виконують у вигляді плоского кругового ободу, до якого закріплюють зовнішні кінці лопатей і який площиною розташовують у площині розташування лопатей.2. Лопатева система за п. 1, яка відрізняється тим, що зовнішні кінці лопатей...
Лопать несучого гвинта вертольота кт-112 “кадет”
Номер патенту: 34829
Опубліковано: 26.08.2008
Автор: Барінов Олексій Борисович
МПК: B64C 11/00, B64C 27/00
Мітки: кт-112, вертольота, лопать, несучого, гвинта, кадет
Формула / Реферат:
1. Лопать несучого гвинта вертольота, яка містить лонжерон, вузол кріплення лопаті до втулки несучого гвинта, окоренковий обтічник, кінцевий обтічник, протифлатерний вантаж, балансувальний вантаж, розміщений у кінцевому обтічнику, хвостовий відсік, обшивку, гумову і металеву антиабразивні накладки та гримерну пластину, розміщену на хвостовому відсіку, при цьому вузол кріплення лопаті до втулки несучого гвинта виконаний жорстко з'єднаним з...
Попередній патент: Банний пристрій на відновлювальних джерелах енергії вітру та сонця і теплових насосах
Наступний патент: Спосіб криптографічного перетворення інформації
Випадковий патент: Спосіб ведення доменної плавки