Робоче обладнання гідравлічного екскаватора
Номер патенту: 95764
Опубліковано: 12.01.2015
Автори: Січко Ігор Миколайович, Мелашич Василь Васильович, Бєліков Анатолій Серафимович
Формула / Реферат
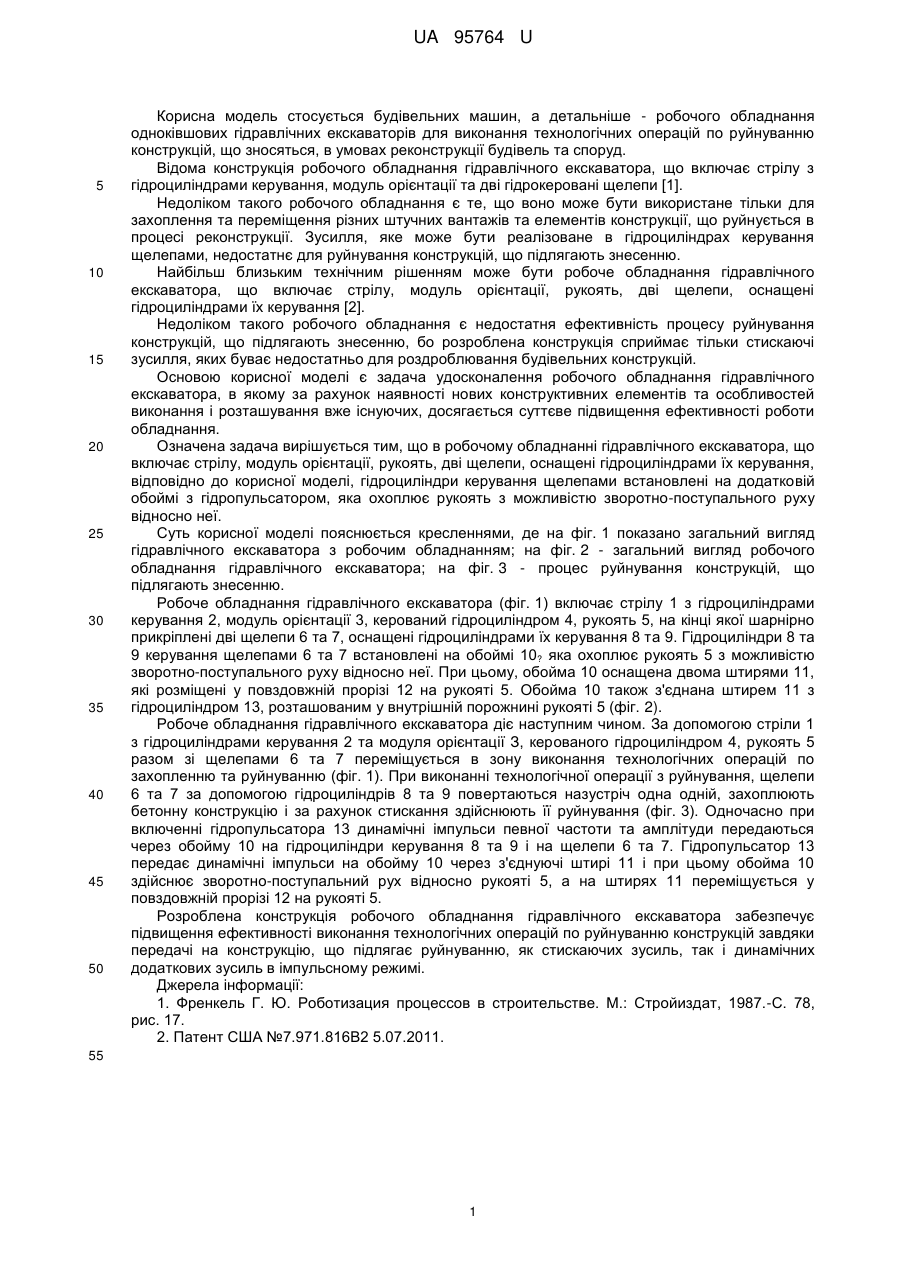
Робоче обладнання гідравлічного екскаватора, що включає стрілу, модуль орієнтації, рукоять, дві щелепи, оснащені гідроциліндрами їх керування, яке відрізняється тим, що гідроциліндри керування щелепами встановлені на додатковій обоймі з гідропульсатором, яка охоплює рукоять з можливістю зворотно-поступального руху відносно неї.
Текст
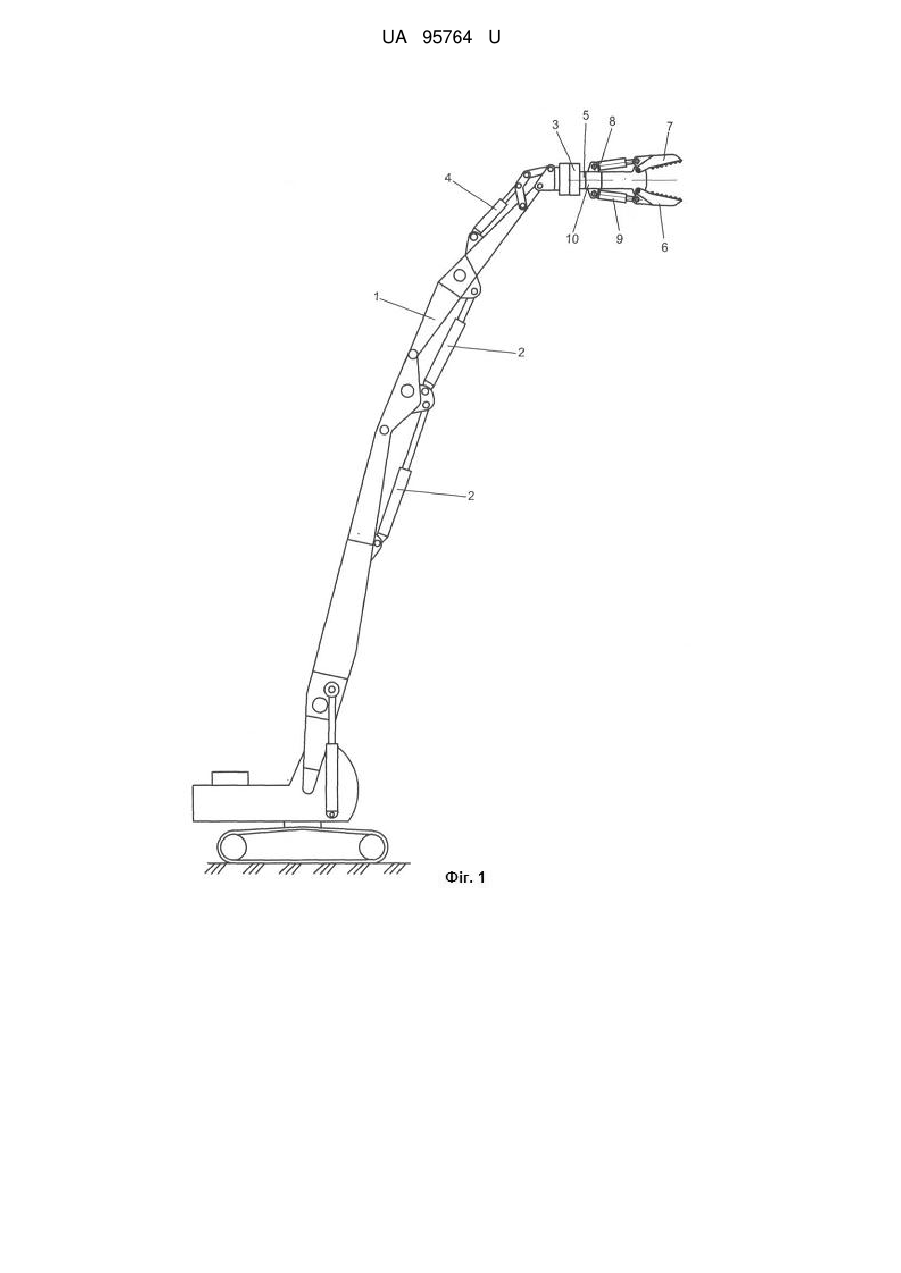
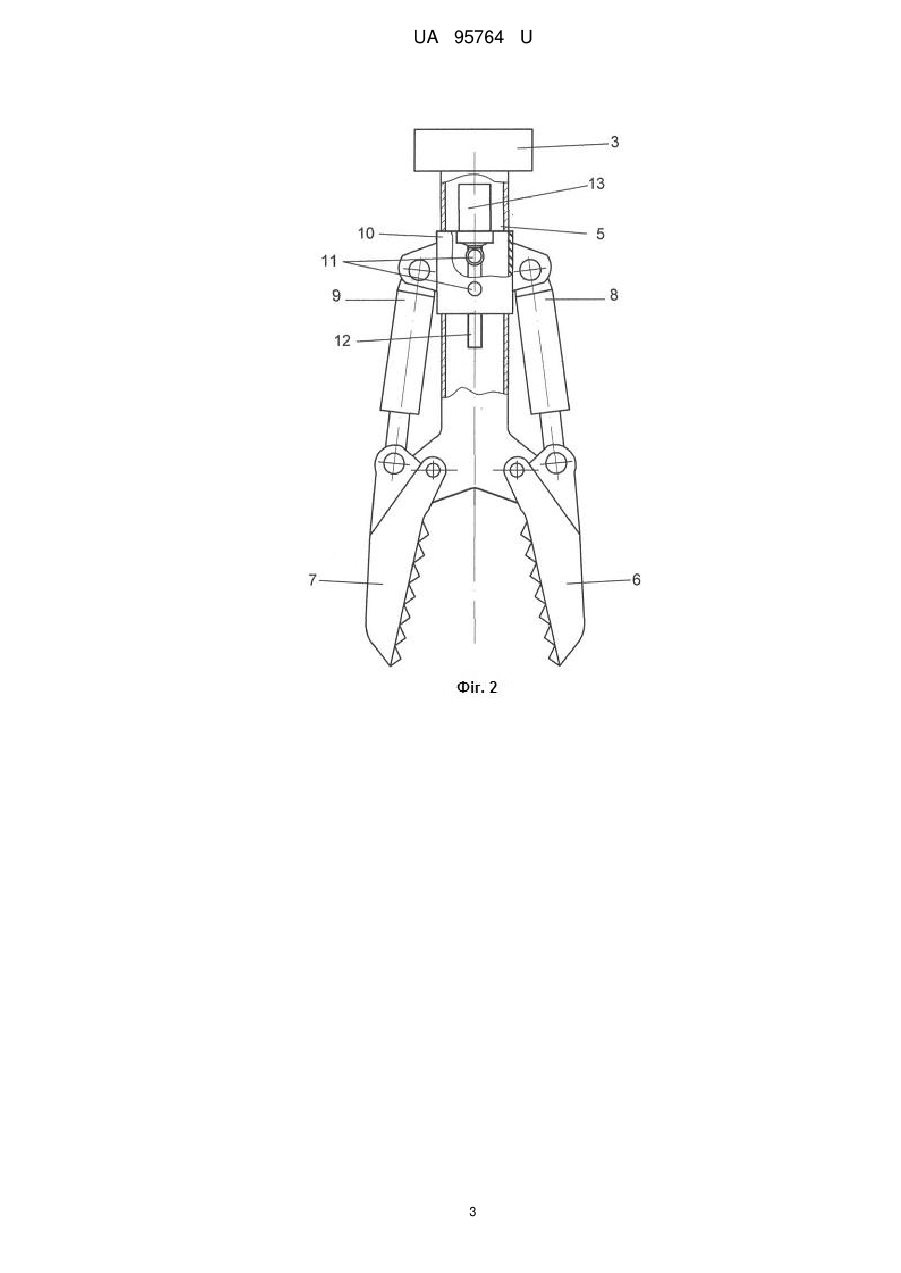
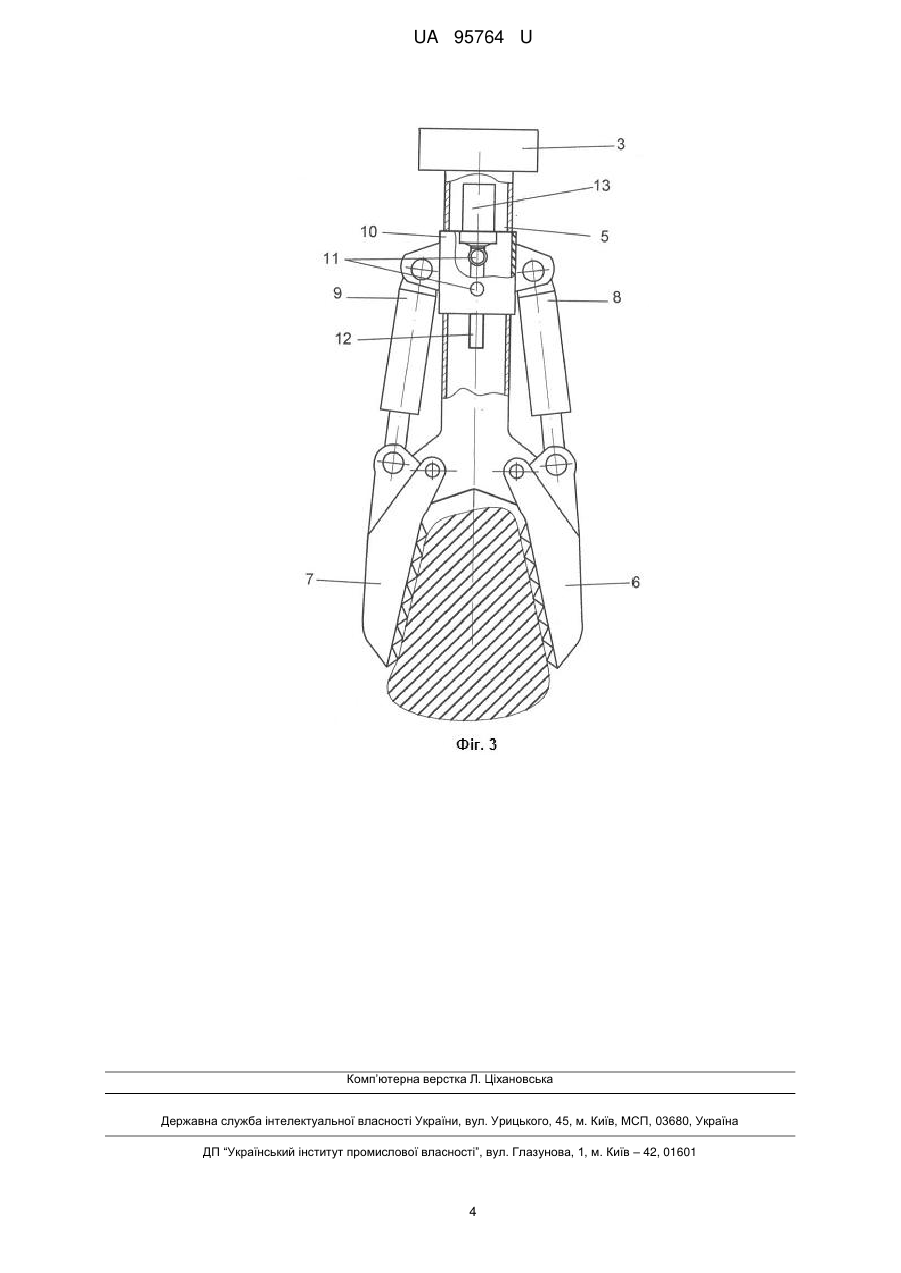
Реферат: UA 95764 U UA 95764 U 5 10 15 20 25 30 35 40 45 50 Корисна модель стосується будівельних машин, а детальніше - робочого обладнання одноківшових гідравлічних екскаваторів для виконання технологічних операцій по руйнуванню конструкцій, що зносяться, в умовах реконструкції будівель та споруд. Відома конструкція робочого обладнання гідравлічного екскаватора, що включає стрілу з гідроциліндрами керування, модуль орієнтації та дві гідрокеровані щелепи [1]. Недоліком такого робочого обладнання є те, що воно може бути використане тільки для захоплення та переміщення різних штучних вантажів та елементів конструкції, що руйнується в процесі реконструкції. Зусилля, яке може бути реалізоване в гідроциліндрах керування щелепами, недостатнє для руйнування конструкцій, що підлягають знесенню. Найбільш близьким технічним рішенням може бути робоче обладнання гідравлічного екскаватора, що включає стрілу, модуль орієнтації, рукоять, дві щелепи, оснащені гідроциліндрами їх керування [2]. Недоліком такого робочого обладнання є недостатня ефективність процесу руйнування конструкцій, що підлягають знесенню, бо розроблена конструкція сприймає тільки стискаючі зусилля, яких буває недостатньо для роздроблювання будівельних конструкцій. Основою корисної моделі є задача удосконалення робочого обладнання гідравлічного екскаватора, в якому за рахунок наявності нових конструктивних елементів та особливостей виконання і розташування вже існуючих, досягається суттєве підвищення ефективності роботи обладнання. Означена задача вирішується тим, що в робочому обладнанні гідравлічного екскаватора, що включає стрілу, модуль орієнтації, рукоять, дві щелепи, оснащені гідроциліндрами їх керування, відповідно до корисної моделі, гідроциліндри керування щелепами встановлені на додатковій обоймі з гідропульсатором, яка охоплює рукоять з можливістю зворотно-поступального руху відносно неї. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 показано загальний вигляд гідравлічного екскаватора з робочим обладнанням; на фіг. 2 - загальний вигляд робочого обладнання гідравлічного екскаватора; на фіг. 3 - процес руйнування конструкцій, що підлягають знесенню. Робоче обладнання гідравлічного екскаватора (фіг. 1) включає стрілу 1 з гідроциліндрами керування 2, модуль орієнтації 3, керований гідроциліндром 4, рукоять 5, на кінці якої шарнірно прикріплені дві щелепи 6 та 7, оснащені гідроциліндрами їх керування 8 та 9. Гідроциліндри 8 та 9 керування щелепами 6 та 7 встановлені на обоймі 10? яка охоплює рукоять 5 з можливістю зворотно-поступального руху відносно неї. При цьому, обойма 10 оснащена двома штирями 11, які розміщені у повздовжній прорізі 12 на рукояті 5. Обойма 10 також з'єднана штирем 11 з гідроциліндром 13, розташованим у внутрішній порожнині рукояті 5 (фіг. 2). Робоче обладнання гідравлічного екскаватора діє наступним чином. За допомогою стріли 1 з гідроциліндрами керування 2 та модуля орієнтації З, керованого гідроциліндром 4, рукоять 5 разом зі щелепами 6 та 7 переміщується в зону виконання технологічних операцій по захопленню та руйнуванню (фіг. 1). При виконанні технологічної операції з руйнування, щелепи 6 та 7 за допомогою гідроциліндрів 8 та 9 повертаються назустріч одна одній, захоплюють бетонну конструкцію і за рахунок стискання здійснюють її руйнування (фіг. 3). Одночасно при включенні гідропульсатора 13 динамічні імпульси певної частоти та амплітуди передаються через обойму 10 на гідроциліндри керування 8 та 9 і на щелепи 6 та 7. Гідропульсатор 13 передає динамічні імпульси на обойму 10 через з'єднуючі штирі 11 і при цьому обойма 10 здійснює зворотно-поступальний рух відносно рукояті 5, а на штирях 11 переміщується у повздовжній прорізі 12 на рукояті 5. Розроблена конструкція робочого обладнання гідравлічного екскаватора забезпечує підвищення ефективності виконання технологічних операцій по руйнуванню конструкцій завдяки передачі на конструкцію, що підлягає руйнуванню, як стискаючих зусиль, так і динамічних додаткових зусиль в імпульсному режимі. Джерела інформації: 1. Френкель Г. Ю. Роботизация процессов в строительстве. М.: Стройиздат, 1987.-С. 78, рис. 17. 2. Патент США №7.971.816В2 5.07.2011. 55 1 UA 95764 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Робоче обладнання гідравлічного екскаватора, що включає стрілу, модуль орієнтації, рукоять, дві щелепи, оснащені гідроциліндрами їх керування, яке відрізняється тим, що гідроциліндри керування щелепами встановлені на додатковій обоймі з гідропульсатором, яка охоплює рукоять з можливістю зворотно-поступального руху відносно неї. 2 UA 95764 U 3 UA 95764 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюMelashych Vasyl Vasyliovych, Bielikov Anatolii Serafimovych, Sichko Ihor Mykolaiovych
Автори російськоюМелашич Василий Васильевич, Беликов Анатолий Серафимович, Сичко Игорь Николаевич
МПК / Мітки
МПК: E02F 3/28
Мітки: гідравлічного, екскаватора, робоче, обладнання
Код посилання
<a href="https://ua.patents.su/6-95764-roboche-obladnannya-gidravlichnogo-ekskavatora.html" target="_blank" rel="follow" title="База патентів України">Робоче обладнання гідравлічного екскаватора</a>
Спеціальне обладнання гідравлічного екскаватора

Номер патенту: 94692
Опубліковано: 25.11.2014
Автори: Мелашич Василь Васильович, Січко Ігор Миколайович, Бєліков Анатолій Серафимович
МПК: E02F 3/28
Мітки: екскаватора, спеціальне, гідравлічного, обладнання
Формула / Реферат:
Спеціальне обладнання гідравлічного екскаватора, що включає рукоять з гідроциліндром керування, модуль орієнтації, нерухому щелепу, до якої шарнірно прикріплена гідрокерована щелепа, яке відрізняється тим, що воно додатково обладнане шарнірно-важільним механізмом паралельного типу, з'єднаним з гідрокерованою щелепою.
Робоче обладнання гідравлічного екскаватора
Номер патенту: 70683
Опубліковано: 25.06.2012
Автори: Бутенко Олександр Анатолійович, Дахно Олег Олександрович, Хмара Леонід Андрійович
МПК: E02F 3/28
Мітки: гідравлічного, обладнання, робоче, екскаватора
Формула / Реферат:
Робоче обладнання гідравлічного екскаватора, що містить телескопічну стрілу, яка складається з двох секцій, рукоять, ківш, механізми приводу стріли, рукояті, ковша, яке відрізняється тим, що стріла обладнана додатковою висувною секцією з механізмом її приводу, виконаним у вигляді двох послідовно розташованих гідроциліндрів, окрім цього, додаткова секція розташована ззовні існуючої висувної секції стріли, та має кронштейн для кріплення...
Телескопічне робоче обладнання гідравлічного екскаватора

Номер патенту: 70686
Опубліковано: 25.06.2012
Автори: Бутенко Олександр Анатолійович, Хмара Леонід Андрійович, Дахно Олег Олександрович
МПК: E02F 3/28
Мітки: обладнання, екскаватора, робоче, телескопічне, гідравлічного
Формула / Реферат:
Телескопічне робоче обладнання гідравлічного екскаватора, що містить телескопічну стрілу, яка складається з двох секцій, рукоять, ківш, механізми приводу стріли, рукояті ковша, яке відрізняється тим, що стріла обладнана додатковою висувною секцією з механізмом її приводу, виконаним у вигляді двох паралельно розташованих гідроциліндрів, окрім цього, додаткова секція має кронштейн для кріплення рукояті та гідроциліндра її приводу, а кожна з...
Спеціальне робоче обладнання екскаватора

Номер патенту: 61687
Опубліковано: 25.07.2011
Автори: Мелашич Василь Васильович, Січко Ігор Миколайович
МПК: E02F 3/28
Мітки: спеціальне, робоче, обладнання, екскаватора
Формула / Реферат:
Спеціальне робоче обладнання екскаватора, що містить двосекційну стрілу, модуль орієнтації, рукоять та дві гідрокеровані щелепи, яке відрізняється тим, що на одній із щелеп у її внутрішній порожнині шарнірно з можливістю переміщення по круговій траєкторії змонтована дробильна плита, оснащена зубцями та ексцентриковим механізмом приводу.
Робоче обладнання гідравлічного екскаватора
Номер патенту: 18606
Опубліковано: 15.11.2006
Автори: Семеній Наталія Олександрівна, Мелашич Василь Васильович
МПК: E02F 3/28
Мітки: обладнання, гідравлічного, робоче, екскаватора
Формула / Реферат:
Робоче обладнання гідравлічного екскаватора, що містить стрілу, рукоять, вилковий захват з гідроциліндром приводу і шарнірно-важільний механізм, яке відрізняється тим, що на штоці гідроциліндра приводу вилкового захвату співвісно з ним жорстко закріплена штанга із шарнірно встановленим на її кінці демпфером з губками, крім цього, на самому вилковому захваті також змонтовані демпфери з губками.
Попередній патент: Спеціальне робоче обладнання для розбирання споруд
Наступний патент: Ікра овочева
Випадковий патент: Водяна баня-лабіринт