Пристрій фільтрації та супроводження цілей
Номер патенту: 96900
Опубліковано: 25.02.2015
Автори: Челпанов Артем Володимирович, Акулінін Гліб Васильович, Безверхий Андрій Вікторович, Шевченко Антон Федорович, Піскунов Станіслав Миколайович

Формула / Реферат
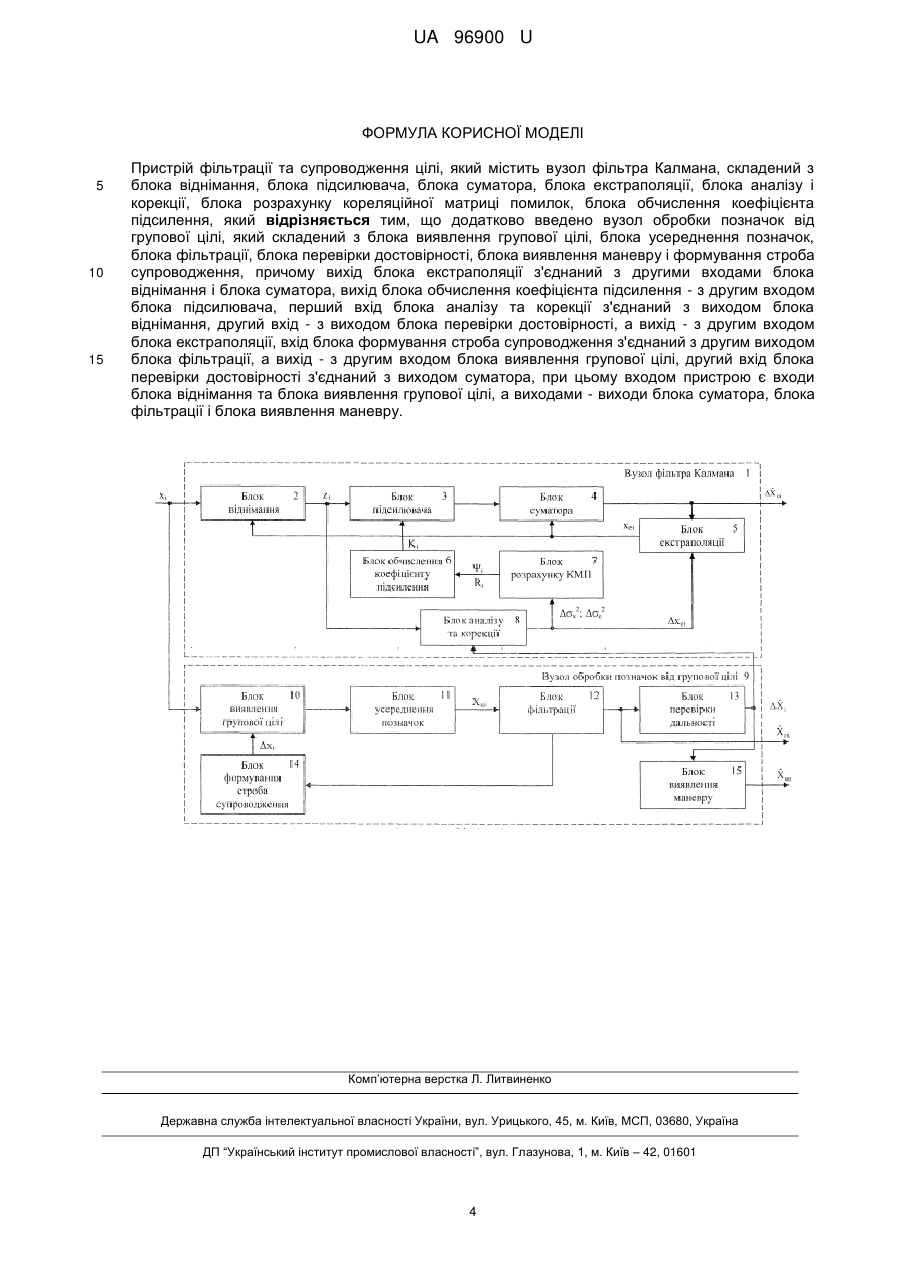
Пристрій фільтрації та супроводження цілі, який містить вузол фільтра Калмана, складений з блока віднімання, блока підсилювача, блока суматора, блока екстраполяції, блока аналізу і корекції, блока розрахунку кореляційної матриці помилок, блока обчислення коефіцієнта підсилення, який відрізняється тим, що додатково введено вузол обробки позначок від групової цілі, який складений з блока виявлення групової цілі, блока усереднення позначок, блока фільтрації, блока перевірки достовірності, блока виявлення маневру і формування строба супроводження, причому вихід блока екстраполяції з'єднаний з другими входами блока віднімання і блока суматора, вихід блока обчислення коефіцієнта підсилення - з другим входом блока підсилювача, перший вхід блока аналізу та корекції з'єднаний з виходом блока віднімання, другий вхід - з виходом блока перевірки достовірності, а вихід - з другим входом блока екстраполяції, вхід блока формування строба супроводження з'єднаний з другим виходом блока фільтрації, а вихід - з другим входом блока виявлення групової цілі, другий вхід блока перевірки достовірності з'єднаний з виходом суматора, при цьому входом пристрою є входи блока віднімання та блока виявлення групової цілі, а виходами - виходи блока суматора, блока фільтрації і блока виявлення маневру.
Текст
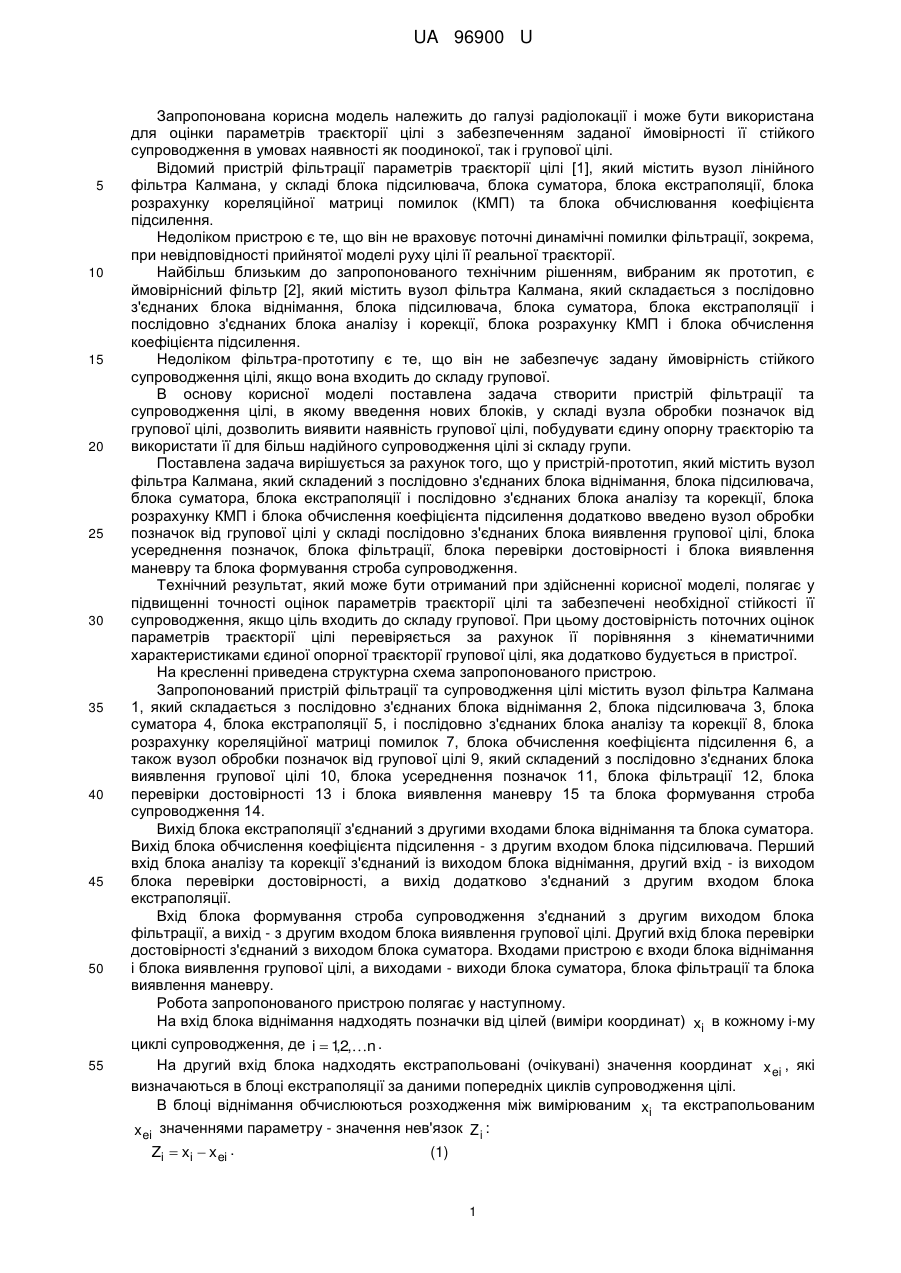
Реферат: Пристрій фільтрації та супроводження цілі, містить вузол фільтра Калмана, складений з блока віднімання, блока підсилювача, блока суматора, блока екстраполяції, блока аналізу і корекції, блока розрахунку кореляційної матриці помилок, блока обчислення коефіцієнта підсилення. Додатково введено вузол обробки позначок від групової цілі, який складений з блока виявлення групової цілі, блока усереднення позначок, блока фільтрації, блока перевірки достовірності, блока виявлення маневру і формування строба супроводження, причому вихід блока екстраполяції з'єднаний з другими входами блока віднімання і блока суматора, вихід блока обчислення коефіцієнта підсилення - з другим входом блока підсилювача, перший вхід блока аналізу та корекції з'єднаний з виходом блока віднімання, другий вхід - з виходом блока перевірки достовірності, а вихід - з другим входом блока екстраполяції, вхід блока формування строба супроводження з'єднаний з другим виходом блока фільтрації, а вихід - з другим входом блока виявлення групової цілі, другий вхід блока перевірки достовірності з'єднаний з виходом суматора, при цьому входом пристрою є входи блока віднімання та блока виявлення групової цілі, а виходами - виходи блока суматора, блока фільтрації і блока виявлення маневру. UA 96900 U (54) ПРИСТРІЙ ФІЛЬТРАЦІЇ ТА СУПРОВОДЖЕННЯ ЦІЛЕЙ UA 96900 U UA 96900 U 5 10 15 20 25 30 35 40 45 50 55 Запропонована корисна модель належить до галузі радіолокації і може бути використана для оцінки параметрів траєкторії цілі з забезпеченням заданої ймовірності її стійкого супроводження в умовах наявності як поодинокої, так і групової цілі. Відомий пристрій фільтрації параметрів траєкторії цілі [1], який містить вузол лінійного фільтра Калмана, у складі блока підсилювача, блока суматора, блока екстраполяції, блока розрахунку кореляційної матриці помилок (КМП) та блока обчислювання коефіцієнта підсилення. Недоліком пристрою є те, що він не враховує поточні динамічні помилки фільтрації, зокрема, при невідповідності прийнятої моделі руху цілі її реальної траєкторії. Найбільш близьким до запропонованого технічним рішенням, вибраним як прототип, є ймовірнісний фільтр [2], який містить вузол фільтра Калмана, який складається з послідовно з'єднаних блока віднімання, блока підсилювача, блока суматора, блока екстраполяції і послідовно з'єднаних блока аналізу і корекції, блока розрахунку КМП і блока обчислення коефіцієнта підсилення. Недоліком фільтра-прототипу є те, що він не забезпечує задану ймовірність стійкого супроводження цілі, якщо вона входить до складу групової. В основу корисної моделі поставлена задача створити пристрій фільтрації та супроводження цілі, в якому введення нових блоків, у складі вузла обробки позначок від групової цілі, дозволить виявити наявність групової цілі, побудувати єдину опорну траєкторію та використати її для більш надійного супроводження цілі зі складу групи. Поставлена задача вирішується за рахунок того, що у пристрій-прототип, який містить вузол фільтра Калмана, який складений з послідовно з'єднаних блока віднімання, блока підсилювача, блока суматора, блока екстраполяції і послідовно з'єднаних блока аналізу та корекції, блока розрахунку КМП і блока обчислення коефіцієнта підсилення додатково введено вузол обробки позначок від групової цілі у складі послідовно з'єднаних блока виявлення групової цілі, блока усереднення позначок, блока фільтрації, блока перевірки достовірності і блока виявлення маневру та блока формування строба супроводження. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у підвищенні точності оцінок параметрів траєкторії цілі та забезпечені необхідної стійкості її супроводження, якщо ціль входить до складу групової. При цьому достовірність поточних оцінок параметрів траєкторії цілі перевіряється за рахунок її порівняння з кінематичними характеристиками єдиної опорної траєкторії групової цілі, яка додатково будується в пристрої. На кресленні приведена структурна схема запропонованого пристрою. Запропонований пристрій фільтрації та супроводження цілі містить вузол фільтра Калмана 1, який складається з послідовно з'єднаних блока віднімання 2, блока підсилювача 3, блока суматора 4, блока екстраполяції 5, і послідовно з'єднаних блока аналізу та корекції 8, блока розрахунку кореляційної матриці помилок 7, блока обчислення коефіцієнта підсилення 6, а також вузол обробки позначок від групової цілі 9, який складений з послідовно з'єднаних блока виявлення групової цілі 10, блока усереднення позначок 11, блока фільтрації 12, блока перевірки достовірності 13 і блока виявлення маневру 15 та блока формування строба супроводження 14. Вихід блока екстраполяції з'єднаний з другими входами блока віднімання та блока суматора. Вихід блока обчислення коефіцієнта підсилення - з другим входом блока підсилювача. Перший вхід блока аналізу та корекції з'єднаний із виходом блока віднімання, другий вхід - із виходом блока перевірки достовірності, а вихід додатково з'єднаний з другим входом блока екстраполяції. Вхід блока формування строба супроводження з'єднаний з другим виходом блока фільтрації, а вихід - з другим входом блока виявлення групової цілі. Другий вхід блока перевірки достовірності з'єднаний з виходом блока суматора. Входами пристрою є входи блока віднімання і блока виявлення групової цілі, а виходами - виходи блока суматора, блока фільтрації та блока виявлення маневру. Робота запропонованого пристрою полягає у наступному. На вхід блока віднімання надходять позначки від цілей (виміри координат) xi в кожному і-му циклі супроводження, де i 12,n . , На другий вхід блока надходять екстрапольовані (очікувані) значення координат x ei , які визначаються в блоці екстраполяції за даними попередніх циклів супроводження цілі. В блоці віднімання обчислюються розходження між вимірюваним xi та екстрапольованим x ei значеннями параметру - значення нев'язок Z i : (1) Zi xi x ei . 1 UA 96900 U В одномірному випадку (по координаті x ) отримуємо: x ei xi 1 xi 1t i t i 1 , 5 (2) де x i 1, x - оцінки параметрів траєкторії цілі (координати і швидкості) в попередньому (і-1) ому циклі супроводження цілі; ti - момент часу, який відповідає і-ому циклу супроводження цілі. При необхідності (наприклад, при виявленні маневру цілі) екстрапольовані значення корегуються в залежності від прискорення маневру q на величину [3]: 1 (3) x ei Zi ; x ei qTi , 2 де Z i - згладжене значення нев'язки за рахунок прискорення q ; Ti - часовий цикл супроводження цілі. Zi Zi1 1 Zi ; (4) qTi2 , 12 - коефіцієнт згладжування; - коефіцієнт за рахунок усереднення. В блоці підсилювача 3 та блоці суматора 4 здійснюється фільтрація позначок з визначенням Zi 10 поточних оцінок параметрів траєкторії xi : 15 (5) x i x ei K i x i x ei . Значення коефіцієнта підсилення фільтра K i рекурентно розраховуються в блоці обчислення коефіцієнта підсилення 6 з використанням значень елементів кореляційної матриці помилок фільтрації i , КМП екстраполяції ei та КМП вимірювань R i [4]. В матричному вигляді: 1 Ki iHT HeiHT Ri , де H - відома матриця перерахунку. В одномірному випадку: Ki 20 25 30 i2 , 2 ei 2 xi i2 , 2 , 2 xi ei (6) (7) де - відповідно, дисперсії помилок оцінки координати, помилок вимірювань і екстраполяції. Значення елементів КМП оцінок параметрів руху i і КМП вимірювань R i визначаються в блоці розрахунку кореляційної матриці помилок 7 з урахуванням корекції дисперсії 2 та 2 x e при виявленні значних динамічних помилок супроводження цілі, наприклад, при збільшенні помилок вимірювань координат цілі та при її маневрі. Зокрема, параметри екстраполяції за швидкістю та прискоренню уточнюються відповідно з (3). Вузол обробки позначок від групової цілі 9 забезпечує підвищення надійності супроводження складових групової цілі. В блоці виявлення групової цілі 10 здійснюється виявлення групової цілі (якщо цілі здійснюють політ в бойовому порядку). Наявність групової цілі і склад групи (кількість цілей Nц ) визначаються в межах стробу супроводження (при Nц 2 ). Розмір стробу супроводження цілі xг розраховується в блоці формування строба супроводження 14 на основі розміру типового бойового порядку групової цілі по відповідній 35 координаті xБ та можливих помилок вимірювань координат (дисперсії 2 ) і динамічних x помилок супроводження цілі i : xг xБ i x . 2 UA 96900 U Для визначення складу групи використовуються сигнали в вигляді когерентної послідовності з M радіоімпульсів. В результаті кореляційної обробки когерентної послідовності забезпечується розрізнювальна спроможність за швидкістю окремих цілей [5]: 0,55 . MTп 5 При послідовності з M 16 радіоімпульсів з періодом повторення Tп 35 10 3 с отримуємо м. с В блоці усереднення позначок 11 визначається координата центра групи: 1 Xц i 1 N X ji , N j 1 10 де j - номер цілі зі складу групи з N цілей; i - номер циклу супроводження. В блоці фільтрації 12 здійснюються фільтрація усереднених позначок відповідно Із співвідношеннями для фільтра Калмана (5), (6) і визначаються оцінки параметрів траєкторії 15 центра групи X г i . Параметри центральної траєкторії використовуються для оцінки достовірності параметрів траєкторії окремих цілей групи. Переплутування цих траєкторій виявляється при розходженні їх параметрів (кінематичних характеристик) з параметрами траєкторії центра групи, зокрема, за швидкістю і прискоренням на деякі величини Xм , Xм : 20 X i X м ; X i Xм . В блоці 8 здійснюється корекція параметрів траєкторії окремих цілей і підвищується ймовірність правильного ототожнення чергових позначок. В блоці виявлення маневру 15 здійснюється виявлення маневру окремих цілей при їх віддаленні від групи (якщо параметри їх траєкторії відрізняються від бічних траєкторій елементів групової цілі на величину Xi , яка визначається прискоренням маневру). 25 В блоці корекції 8 корегуються параметри траєкторії X ei , Xi і параметри фільтра (коефіцієнт підсилення). На вихід пристрою фільтрації та супроводження цілей видаються вектор оцінок параметрів траєкторії центра групи (єдиної опорної траєкторії) X г i , параметри окремих траєкторій супроводжуваних цілей зі складу групи Xoi та цілей, що відділяються від групи, здійснюючи 30 35 40 45 маневр Xмi . Послідовність включення в роботу окремих блоків пристрою фільтрації та супроводження цілей та їх взаємодія визначається сіткою керуючих імпульсів, прив'язаних до сітки частот синхронізатора радіолокаційної станції (вузол синхронізації і керування на схемі пристрою не показаний). При технічній реалізації запропонованого пристрою фільтрації та супроводження цілей використовуються типові вузли і блоки радіоелектронної апаратури, інтегральні схеми і мікропроцесори з відповідним програмним забезпеченням [4]. Джерела інформації: 1. Корестелев А.А. Пространственно-временная теория радиосистем. - М.: Радио и связь, 1987. - с.251. 2. Патент на корисну модель 71892, Україна, МПК5 G01S 13/52. Ймовірнісний фільтр. / Челпанов В.В. та ін. № 201201587. Заяв. 14.02.2012. Опубл. 25.07.2012. Бюл. № 14. 3. Саврасов Ю.С. Алгоритмы и программы в радиолокации. - М: Радио и связь, 1985. - 216 с. 4. Кузьмин С.З. Цифровая радиолокация. Введение в теорию. - К.: КВІЦ, 2000. - 428с. 5. Обработка сигналов в многоканальных РЛС. Под ред. А.П. Лукошкина. - М.: Радио и свіязь, 1983. - 197 с. 3 UA 96900 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Пристрій фільтрації та супроводження цілі, який містить вузол фільтра Калмана, складений з блока віднімання, блока підсилювача, блока суматора, блока екстраполяції, блока аналізу і корекції, блока розрахунку кореляційної матриці помилок, блока обчислення коефіцієнта підсилення, який відрізняється тим, що додатково введено вузол обробки позначок від групової цілі, який складений з блока виявлення групової цілі, блока усереднення позначок, блока фільтрації, блока перевірки достовірності, блока виявлення маневру і формування строба супроводження, причому вихід блока екстраполяції з'єднаний з другими входами блока віднімання і блока суматора, вихід блока обчислення коефіцієнта підсилення - з другим входом блока підсилювача, перший вхід блока аналізу та корекції з'єднаний з виходом блока віднімання, другий вхід - з виходом блока перевірки достовірності, а вихід - з другим входом блока екстраполяції, вхід блока формування строба супроводження з'єднаний з другим виходом блока фільтрації, а вихід - з другим входом блока виявлення групової цілі, другий вхід блока перевірки достовірності з'єднаний з виходом суматора, при цьому входом пристрою є входи блока віднімання та блока виявлення групової цілі, а виходами - виходи блока суматора, блока фільтрації і блока виявлення маневру. Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюChelpanov Artem Volodymyrovych, Akulinin Hlib Vasyliovych, Piskunov Stanislav Mykolaiovych
Автори російськоюЧелпанов Артем Владимирович, Акулинин Глеб Васильевич, Пискунов Станислав Николаевич
МПК / Мітки
МПК: G01S 13/52
Мітки: цілей, супроводження, фільтрації, пристрій
Код посилання
<a href="https://ua.patents.su/6-96900-pristrijj-filtraci-ta-suprovodzhennya-cilejj.html" target="_blank" rel="follow" title="База патентів України">Пристрій фільтрації та супроводження цілей</a>
Пристрій супроводження радіолокаційних цілей
Номер патенту: 62816
Опубліковано: 12.09.2011
Автори: Пєвцов Геннадій Володимирович, Челпанов Артем Володимирович, Яцуценко Анатолій Якович, Карлов Дмитро Володимирович, Клімішен Олексій Олегович
МПК: G01S 13/52
Мітки: супроводження, радіолокаційних, цілей, пристрій
Формула / Реферат:
Пристрій супроводження радіолокаційних цілей, що містить послідовно з'єднані блок формування стробу, блок відбору позначок в стробі, блок визначення відхилень, блок вибору позначок та блок фільтрації і екстраполяції, який відрізняється тим, що додатково після блока визначення відхилень введено вузол непараметричної селекції у складі послідовно з'єднаних блока формування вибірок нев'язок, блока ранжування нев'язок та блока тестування вибірок,...
Пристрій супроводження цілей
Номер патенту: 56901
Опубліковано: 25.01.2011
Автори: Квіткін Костянтин Петрович, Челпанов Артем Володимирович, Коломійцев Олексій Володимирович, Хмелевська Ольга Олександрівна, Рибалка Григорій Валерійович
МПК: G01S 13/52
Мітки: супроводження, цілей, пристрій
Формула / Реферат:
Пристрій супроводження цілей, що містить послідовно з'єднані блок відбору позначок у стробах, блок формування нев'язок, блок формування вибірок нев'язок, блок обчислення достовірності варіантів селекції, блок селекції позначок та блок фільтрації і екстраполяції, який відрізняється тим, що додатково введені вузол непараметричного тестування у складі послідовно з'єднаних блока ранжування вибірок нев'язок та блока тестування вибірок, також...
Пристрій для супроводження цілей
Номер патенту: 67301
Опубліковано: 10.02.2012
Автори: Челпанов Володимир Валентинович, Піскунов Станіслав Миколайович, Челпанов Артем Володимирович, Тіхонов Іван Митрофанович, Лезік Олександр Віталійович
МПК: G01S 13/52
Мітки: супроводження, цілей, пристрій
Формула / Реферат:
Пристрій для супроводження цілей, що містить послідовно з'єднані блок визначення координат, блок фільтрації, блок визначення коефіцієнта підсилення, блок екстраполяції, блок формування нев'язок, блок фільтрації нев'язок і блок виявлення та визначення характеристик маневру, який відрізняється тим, що додатково введені вузол когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора і блока формування оцінки...
Адаптивний пристрій фільтрації параметрів траєкторії цілей
Номер патенту: 67043
Опубліковано: 15.06.2004
Автори: Рафальський Юрій Іванович, Карлов Володимир Дмитрийович, Челпанов Артем Володимирович, Яровий Сергій Володимирович, Петрушенко Миколай Миколайович
МПК: G01S 13/52
Мітки: цілей, пристрій, фільтрації, параметрів, траєкторії, адаптивний
Формула / Реферат:
Адаптивний пристрій фільтрації параметра траєкторії цілі, що містить фільтр Калмана, пороговий блок і блок вибору максимуму, який відрізняється тим, що додатково введені три блоки пам'яті, блок суматора, блок формування вибірки, блок оцінки прискорення і блок корекції, до того ж, перший блок пам'яті, блок фільтра Калмана, другий блок пам'яті, блок суматора, блок формування вибірки, пороговий блок і блок вибору максимуму з'єднані послідовно,...
Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі

Номер патенту: 19892
Опубліковано: 15.01.2007
Автори: Петрушенко Микола Миколайович, Карлов Володимир Дмитрович, Челпанов Артем Володимирович, Гаврілкін Володимир Вільевич, Луковський Олег Ярославович, Квіткін Костянтин Петрович
МПК: G01S 13/52
Мітки: пристрій, адаптивний, фільтрації, маневруючої, цілі, параметрів, траєкторії
Формула / Реферат:
Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі, що містить фільтр Калмана 2-го порядку, фільтр Калмана 3-го порядку і комутатор, який відрізняється тим, що додатково введені блок формування вибірки, блок корегування кореляційної матриці помилок (КМП) вимірювань у складі послідовно з'єднаних першого блока оцінювання середнього, першого блока оцінювання КМП фільтрації і блока розрахунку КМП вимірювань, блок виявлення і...
Попередній патент: Антенний пристрій
Наступний патент: Спосіб обробки біологічної порожнини
Випадковий патент: Спосіб лікування гострого деструктивного панкреатиту