Пристрій для супроводження цілей
Номер патенту: 67301
Опубліковано: 10.02.2012
Автори: Лезік Олександр Віталійович, Тіхонов Іван Митрофанович, Челпанов Володимир Валентинович, Піскунов Станіслав Миколайович, Челпанов Артем Володимирович


Формула / Реферат
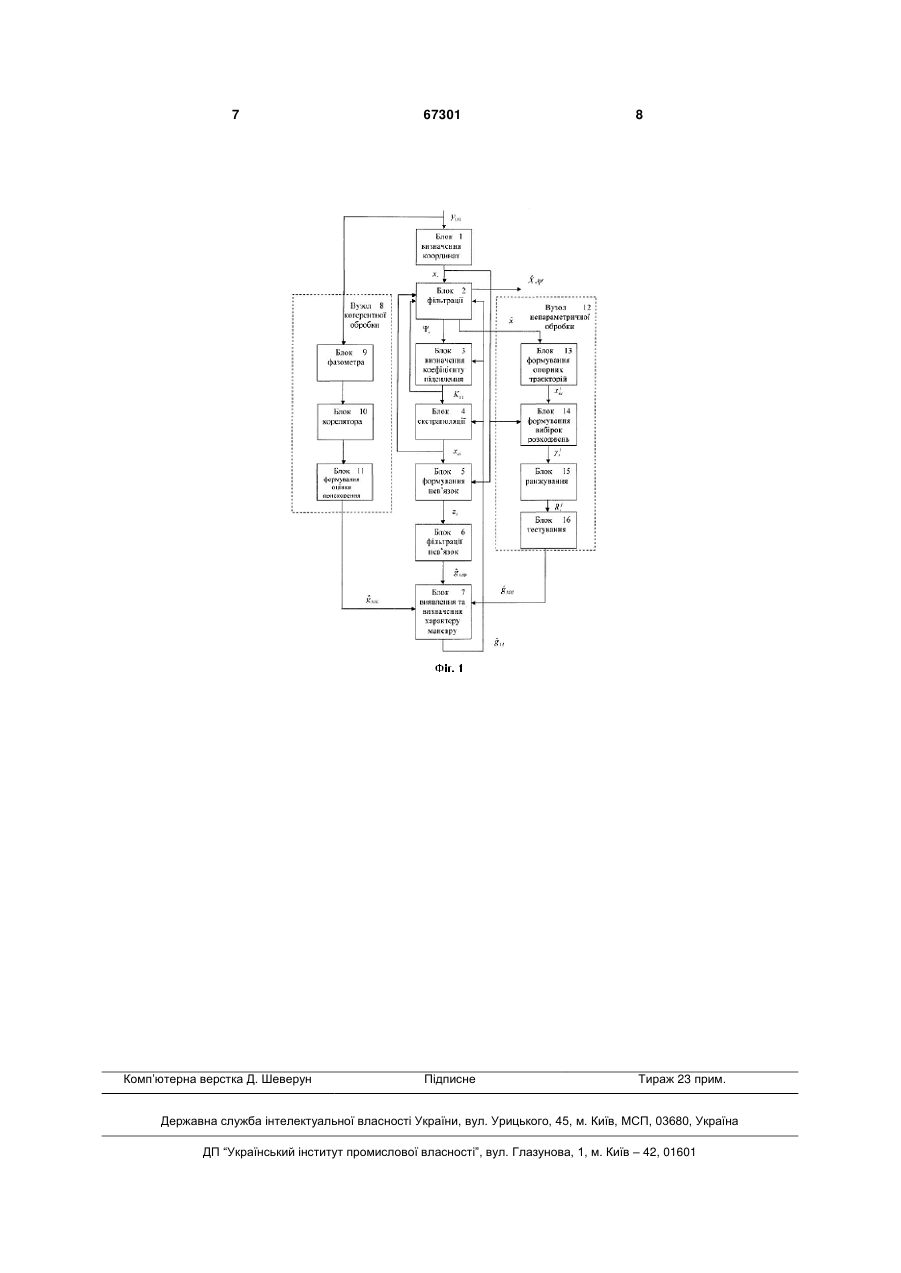
Пристрій для супроводження цілей, що містить послідовно з'єднані блок визначення координат, блок фільтрації, блок визначення коефіцієнта підсилення, блок екстраполяції, блок формування нев'язок, блок фільтрації нев'язок і блок виявлення та визначення характеристик маневру, який відрізняється тим, що додатково введені вузол когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора і блока формування оцінки прискорення та вузол непараметричної обробки у складі послідовно з'єднаних блока формування опорних траєкторій, блока формування вибірок розходжень, блока ранжування і блока тестування, при цьому вихід блока визначення координат додатково з'єднаний із другими входами блока формування нев'язок і блока формування вибірок розходжень, виходи блока визначення коефіцієнта підсилення і блока екстраполяції додатково з'єднані із входами блока фільтрації, вихід блока виявлення та визначення характеристик маневру з'єднаний із другими входами блока фільтрації і блока визначення коефіцієнта підсилення і блока екстраполяції, вхід блока фазометра з'єднаний із входом пристрою, а вихід блока формування оцінки прискорення - із другим входом блока виявлення та визначення характеристик маневру, вхід блока формування опорних траєкторій з'єднаний із виходом блока фільтрації, вихід блока тестування - із третім входом блока виявлення та визначення характеристик маневру, при цьому входом пристрою є вхід блока визначення координат, а виходом - другий вихід блока фільтрації.
Текст
Пристрій для супроводження цілей, що містить послідовно з'єднані блок визначення координат, блок фільтрації, блок визначення коефіцієнта підсилення, блок екстраполяції, блок формування нев'язок, блок фільтрації нев'язок і блок виявлення та визначення характеристик маневру, який відрізняється тим, що додатково введені вузол когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора і блока формування оцінки прискорення та вузол непараметричної обробки у складі послідовно з'єднаних бло U 1 3 блок визначення координат, блок фільтрації, блок визначення коефіцієнта підсилення, блок екстраполяції, блок формування нев'язок, блок фільтрації нев'язок та блок виявлення і визначення характеристик маневру, додатково введено вузол когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора і блока формування оцінки прискорення, та вузол непараметричної обробки у складі послідовно з'єднаних блока формування опорних траєкторій, блока формування вибірок розходжень, блока ранжування та блока тестування. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає в підвищенні достовірності виявлення і точності оцінки інтенсивності маневру та відповідної корекції параметрів фільтра і уточненні оцінок параметрів траєкторії цілі, що маневрує. Позитивний ефект досягається за рахунок використання когерентної обробки та непараметричного методу аналізу. На фіг. 1 приведена структурна схема запропонованого пристрою. Запропонований пристрій для супроводження цілей містить послідовно з'єднані блок визначення координат 1, блок фільтрації 2, блок визначення коефіцієнта підсилення 3, блок екстраполяції 4, блок формування нев'язок 5 блок фільтрації нев'язок 6 і блок виявлення та визначення характеристик маневру 7, вузол когерентної обробки 8 у складі послідовно з'єднаних блока фазометра 9, блока корелятора 10 і блока формування оцінки прискорення 11, вузол непараметричної обробки 12 у складі послідовно з'єднаних блока формування опорних траєкторій 13, блока формування вибірок розходжень 14, блока ранжування 15 і блока тестування 16. Вихід блока визначення координат додатково з'єднаний із другими входами блока формування нев'язок і блока формування вибірок розходжень. Виходи блока визначення коефіцієнта підсилення та блока екстраполяції додатково з'єднані із входами блока фільтрації, вихід блока виявлення та визначення характеристик маневру - із другими входами блока фільтрації, блока визначення коефіцієнта підсилення і блока екстраполяції. Вхід блока фазометра з'єднаний із входом пристрою, вихід блока формування оцінки прискорення з'єднаний з другим входом блока виявлення та визначення характеристик маневру. Вхід блока формування опорних траєкторій з'єднаний із виходом блока фільтрації, а вихід блока тестування - з третім входом блока виявлення та визначення характеристик маневру. Входом пристрою є вхід блока визначення координат, а виходом - другий вихід блока фільтрації. Робота запропонованого пристрою полягає у наступному. На вхід пристрою надходять луна-сигнали від цілей y(tі), за якими в блоці 1 визначаються координати цілей хі (параметри позначок супроводження). В блоці фільтрації здійснюються рекурентна фільтрація позначок із визначенням поточних оціˆ x нок параметрів траєкторії цілі і та кореляційної 67301 4 матриці помилок і відповідно із співвідношення ми лінійного фільтра Калмана. Зокрема, для координати х [1]: xі x еі k ni ( xi x еі ) , (1) xe де - екстрапольоване значення параметра; k ni - коефіцієнт підсилення фільтра, який визначається помилками вимірювання координат 2 2 (дисперсії x ), помилками екстраполяції ( xe ) та можливим прискоренням маневру. Значення коефіцієнта підсилення та екстрапольовані значення визначаються відповідно в блоках 3 і 4: ˆ ˆ xei xi1 xi1( ti ti1) ; (2) 2 xe k ni 2 2 . (3) xe x В блоці 5 формуються поточні значення нев'яz зок i : zi xi x еі . (4) При нормальному законі розподілу помилок вимірювань із середнім Mx 0 нев'язки також розподілені за нормальним законом з Mz 0 . Тому при маневрі цілі з'являється складова g нев'язки за рахунок прискорення маневру м [3]: 1 zi gì T 2 (k m)2 , (5) 2 де k , m - номери циклів супроводження - поточного та початку маневру. Виявлення маневру та визначення його характеристик здійснюються в блоці 7, для цього викоz ристовуються значення нев'язок i , які обробляються в фільтрах 6, налаштованих на різні значення послідовності складових x різні прискорення маневру j : z ij , тобто на k Ф( j ) x h i 1 де hij j k i z i , (6) - імпульсна характеристика j - го фільт ра. Параметри фільтра, на виході якого отримано Ф( j ) x максимальне значення , визначають оцінку ˆ прискорення маневру gÌÔ . g g При МФ пор приймається рішення про наявність маневру. Для підвищення точності та достовірності інформації щодо маневру цілі, при збільшенні значення нев'язки, додатково призначаються режим когерентної обробки послідовності з N радіоімпу льсів з періодом k . В блоці фазометра вимірюються значення функцій фази сигналів когерентної 5 пачці 67301 i , які визначаються параметрами траєктоR рії цілі, зокрема дальністю 0 та її похідними швидкістю R і прискоренням R : 4 1 i [R 0 R( t i t 0 ) R( t i t 0 )2 ] 2 . (7) ˆ де R T - поточна оцінка швидкості, як параме тра траєкторії цілі; Rj - параметр за прискоренням для j -ої еталонної функції фази; , R jR ; j 0,12......M . j Порівняння здійснюються в блоці корелятора 10 за рахунок обчислення M значень кореляційB ного інтегралу j : Bj 1 [ N N 2 N sin( i em ji )] [ i 1 cos( i em ji )] i 1 , (9) За оцінку прискорення маневру за даними ко R ˆ g герентної обробки мк приймається параметр j тієї (r-ої) еталонної функції, при порівнянні з якою отримане максимальне значення кореляційного інтегралу: ˆ Br max{ B j } ; g ìê Rr . (10) j У склад пристрою додатково включено вузол непараметричної обробки 12, в якому при розходженні фільтра (збільшенні помилок фільтрації позначок) здійснюється оцінка параметрів супроˆ воджуваної траєкторії (швидкості x та прискоренˆ x ня маневру g ) з використанням непараметMH ричного методу аналізу. Непараметричні методи можуть бути більш ефективними, якщо закон розподілу помилок вимірювань відрізняється від норx мальних. Для цього вибірка позначок i за М останніх циклів супроводження порівнюється з j x oi вибірками позначок , які відповідають j 12,.....J опорним траєкторіям цілі з різними па, x x раметрами за швидкість j та прискоренням j : 1 j ˆ xoi x T ( xT x j )( ti to ) j ( ti to )2 , (11) x 2 Параметри опорних траєкторій вибираються відносно оцінок параметрів супроводжувальної ˆ ˆ траєкторії x T , x T і відрізняються за швидкістю, та прискоренням маневру: x j n x; n 12,...N , j l x; l 12,...L x , j 12,...J ; J N L , x j j x Параметри j -ої траєкторії o ; o , яка в найбільшій степені відповідає отриманої вибірці позначок, приймаються за оцінки параметрів траєкторії цілі: 6 ˆ ˆ j x x T x0 ; T 0 gMH . (12) xj Формування опорних траєкторій здійснюється в блоці 13. Степінь розбіжності опорних траєкторій і траєкторії цілі характеризують вибірки розходжень j ij x i x oi , які формуються в блоці 14. Далі в блоці 15 здійснюється ранжування елементів вибірок [4]: M R ij sgn( j i r ) i i 1 , (13) , 1 якщо sgn , 0, якщо де j 12,...J ; 0 ; 0 R ij - ранги і - го елемента j -ої вибірки. Для прийняття рішення, яка опорна траєкторія (наприклад, з номером s) відповідає траєкторії цілі, використовуються рангові тести виду: M Gj R j i i 1 ; (14) чи тести рангової кореляції: M Gj i R j i i 1 . (15) Gs min{G j } jJ Тоді j s при . При виконанні умови (14) забезпечується мінімум сумарного розходження позначок від опорної траєкторії. Ранговий тест виду (15) додатково ураховує зміну рангів в часі (сходимість позначок відповідно опорної траєкторії). Отримані оцінки похідних (12) використовуються далі для корекції (уточнення) оцінок параˆ ˆ метрів траєкторії цілі ( x, x, x e ) і параметрів філь k трів (коефіцієнта підсилення n ) в блоках 2,3, 4. На виході пристрою видаються уточнені оцінки параметрів цілі, що маневрує. додатково ураховує зміну рангів в часі (сходимість позначок відповідно опорної траєкторії). Отримані оцінки похідних (12) використовуються далі для корекції (уточнення) оцінок параˆ ˆ метрів траєкторії цілі ( x, x, x ) і параметрів фільe kn трів (коефіцієнта підсилення ) в блоках 2,3, 4. На виході пристрою видаються уточнені оцінки параметрів цілі, що маневрує. Джерела інформації:. 1. Кузьмин С. З. Цифровая радиолокация. Введение в теорію. - К.: КВІЦ, 2000,250 с. 2. Фарина А., Студер Ф. Цифровая обработка радиолокацонной информации. Сопровождение целей. / Пер. С англ. - М.: Радио и связь, 1993.-225 с. 3. Саврасов Ю.С. Алгоритмы и программы в радиолокации. - М: Радио и связь. 1985.-216 с. 4. Лапий В.Ю., Калюжный А.Я., Красный Л.Г. Устройства ранговой обработки информации. - К.: Техника, 1986.-120с. 7 Комп’ютерна верстка Д. Шеверун 67301 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for target tracking
Автори англійськоюChelpanov Volodymyr Valentynovych, Lezik Oleksandr Vitaliiovych, Piskunov Stanislav Mykolaiovych, Chelpanov Artem Volodymyrovych, Tikhonov Ivan Mytrofanovych
Назва патенту російськоюУстройство для сопровождения целей
Автори російськоюЧелпанов Владимир Валентинович, Лезик Александр Витальевич, Пискунов Станислав Николаевич, Челпанов Артем Владимирович, Тихонов Иван Митрофанович
МПК / Мітки
МПК: G01S 13/52
Мітки: супроводження, цілей, пристрій
Код посилання
<a href="https://ua.patents.su/4-67301-pristrijj-dlya-suprovodzhennya-cilejj.html" target="_blank" rel="follow" title="База патентів України">Пристрій для супроводження цілей</a>
Пристрій супроводження радіолокаційних цілей
Номер патенту: 62816
Опубліковано: 12.09.2011
Автори: Яцуценко Анатолій Якович, Пєвцов Геннадій Володимирович, Карлов Дмитро Володимирович, Челпанов Артем Володимирович, Клімішен Олексій Олегович
МПК: G01S 13/52
Мітки: супроводження, цілей, радіолокаційних, пристрій
Формула / Реферат:
Пристрій супроводження радіолокаційних цілей, що містить послідовно з'єднані блок формування стробу, блок відбору позначок в стробі, блок визначення відхилень, блок вибору позначок та блок фільтрації і екстраполяції, який відрізняється тим, що додатково після блока визначення відхилень введено вузол непараметричної селекції у складі послідовно з'єднаних блока формування вибірок нев'язок, блока ранжування нев'язок та блока тестування вибірок,...
Пристрій супроводження цілей
Номер патенту: 56901
Опубліковано: 25.01.2011
Автори: Коломійцев Олексій Володимирович, Хмелевська Ольга Олександрівна, Рибалка Григорій Валерійович, Квіткін Костянтин Петрович, Челпанов Артем Володимирович
МПК: G01S 13/52
Мітки: пристрій, супроводження, цілей
Формула / Реферат:
Пристрій супроводження цілей, що містить послідовно з'єднані блок відбору позначок у стробах, блок формування нев'язок, блок формування вибірок нев'язок, блок обчислення достовірності варіантів селекції, блок селекції позначок та блок фільтрації і екстраполяції, який відрізняється тим, що додатково введені вузол непараметричного тестування у складі послідовно з'єднаних блока ранжування вибірок нев'язок та блока тестування вибірок, також...
Адаптивний пристрій фільтрації параметрів траєкторії цілей
Номер патенту: 67043
Опубліковано: 15.06.2004
Автори: Рафальський Юрій Іванович, Яровий Сергій Володимирович, Челпанов Артем Володимирович, Карлов Володимир Дмитрийович, Петрушенко Миколай Миколайович
МПК: G01S 13/52
Мітки: параметрів, цілей, траєкторії, фільтрації, пристрій, адаптивний
Формула / Реферат:
Адаптивний пристрій фільтрації параметра траєкторії цілі, що містить фільтр Калмана, пороговий блок і блок вибору максимуму, який відрізняється тим, що додатково введені три блоки пам'яті, блок суматора, блок формування вибірки, блок оцінки прискорення і блок корекції, до того ж, перший блок пам'яті, блок фільтра Калмана, другий блок пам'яті, блок суматора, блок формування вибірки, пороговий блок і блок вибору максимуму з'єднані послідовно,...
Адаптивний пристрій супроводу маневруючих цілей

Номер патенту: 56074
Опубліковано: 15.04.2003
Автори: Коваль Олександр Андрійович, Карлов Володимир Дмитрийович, Челпанов Артем Володимирович, Сірик Юрій Анатолійович, Яровий Сергій Володимирович, Пащенко Руслан Едуардович
МПК: G01S 13/52, G01S 13/00
Мітки: цілей, пристрій, маневруючих, супроводу, адаптивний
Формула / Реферат:
Адаптивний пристрій супроводу маневруючих цілей, що містить послідовно з'єднані блоки фільтра Калмана другого порядку, фільтра Калмана третього порядку і комутатор, який відрізняється тим, що додатково введені блок виявлення маневру і блок оцінки інтенсивності маневру, причому блок виявлення маневру складається із послідовно з'єднаних блока формування вибірок, блока обчислення рангу, блока обчислення рангової статистики і порогового блока, а...
Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі

Номер патенту: 19892
Опубліковано: 15.01.2007
Автори: Луковський Олег Ярославович, Петрушенко Микола Миколайович, Челпанов Артем Володимирович, Карлов Володимир Дмитрович, Квіткін Костянтин Петрович, Гаврілкін Володимир Вільевич
МПК: G01S 13/52
Мітки: фільтрації, пристрій, цілі, траєкторії, параметрів, маневруючої, адаптивний
Формула / Реферат:
Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі, що містить фільтр Калмана 2-го порядку, фільтр Калмана 3-го порядку і комутатор, який відрізняється тим, що додатково введені блок формування вибірки, блок корегування кореляційної матриці помилок (КМП) вимірювань у складі послідовно з'єднаних першого блока оцінювання середнього, першого блока оцінювання КМП фільтрації і блока розрахунку КМП вимірювань, блок виявлення і...
Попередній патент: Лікарський засіб у вигляді розчину для інфузій для лікування цукрового діабету та його ускладнень
Наступний патент: Модифікований генно-інженерний злитий білок spa-cbd2, продукований бактеріями e. coli
Випадковий патент: Привідний пристрій для зернозбирального комбайна