Розмотувальний пристрій


Формула / Реферат
1. Розмотувальний пристрій, який містить такі елементи:
- розмотувач (1) для розмотування смуги (2);
- розміщений за розмотувачем (1) пристрій (3) вимірювання товщини для вимірювання товщини (d) розмотуваної смуги (2);
- розміщений за пристроєм (3) вимірювання товщини правильний верстат (5) для випрямляння розмотуваної смуги (2);
- розміщений за правильним верстатом (5) пристрій (9) вимірювання висоти для визначення положення по висоті (h) випрямленої смуги;
- розміщений за пристроєм (9) вимірювання висоти обробний пристрій (8) для подальшої обробки випрямленої смуги (2);
- керуючий пристрій (4), з'єднаний з пристроєм (3) вимірювання товщини (d) розмотуваної смуги (2) та з пристроєм (9) вимірювання положення по висоті (h) і виконаний зі здатністю на основі команди для визначення, залежно від визначеної товщини (d) розмотуваної смуги, визначати керуючі значення (А*) для правильного верстата (5) і керувати щонайменше правильним верстатом (5),
який відрізняється тим, що керуючий пристрій (4) виконаний зі здатністю адаптування команди для визначення залежно від визначеного положення по висоті (h).
2. Розмотувальний пристрій за п. 1, який відрізняється тим, що пристрій (3) вимірювання товщини базується на принципі вимірювання відстані.
3. Розмотувальний пристрій за п. 2, який відрізняється тим, що пристрій (3) вимірювання товщини виконаний з можливістю сканування розмотуваної смуги (2) з одного боку.
4. Розмотувальний пристрій за п. 3, який відрізняється тим, що у місці (10) сканування пристроєм (3) вимірювання товщини розмотувана смуга (2) спирається на опорний ролик (11).
5. Розмотувальний пристрій за п. 2, який відрізняється тим, що пристрій (3) вимірювання товщини виконаний з можливістю сканування розмотуваної смуги (2) з двох боків.
6. Розмотувальний пристрій за п. 1, який відрізняється тим, що керуючий пристрій (4) додатково виконаний зі здатністю керувати розмотувачем (1).
7. Розмотувальний пристрій за одним із пп. 1-6, який відрізняється тим, що обробний пристрій (8) має кілька часткових пристроїв (13-15), причому наступний за правильним верстатом (5) частковий пристрій (13) обробного пристрою (8) виконаний як ножиці (13).
8. Розмотувальний пристрій за п. 7, який відрізняється тим, що наступний за ножицями (13) частковий пристрій (14) обробного пристрою (8) виконаний як зварювальний пристрій (14) для зварювання випрямленої смуги (2) з іншою смугою (2').
9. Розмотувальний пристрій за п. 8, який відрізняється тим, що наступний за зварювальним пристроєм (14) частковий пристрій (15) обробного пристрою (8) виконаний як накопичувач (15) смуги для проміжного зберігання іншої смуги (2') або як очищувальний пристрій.
Текст
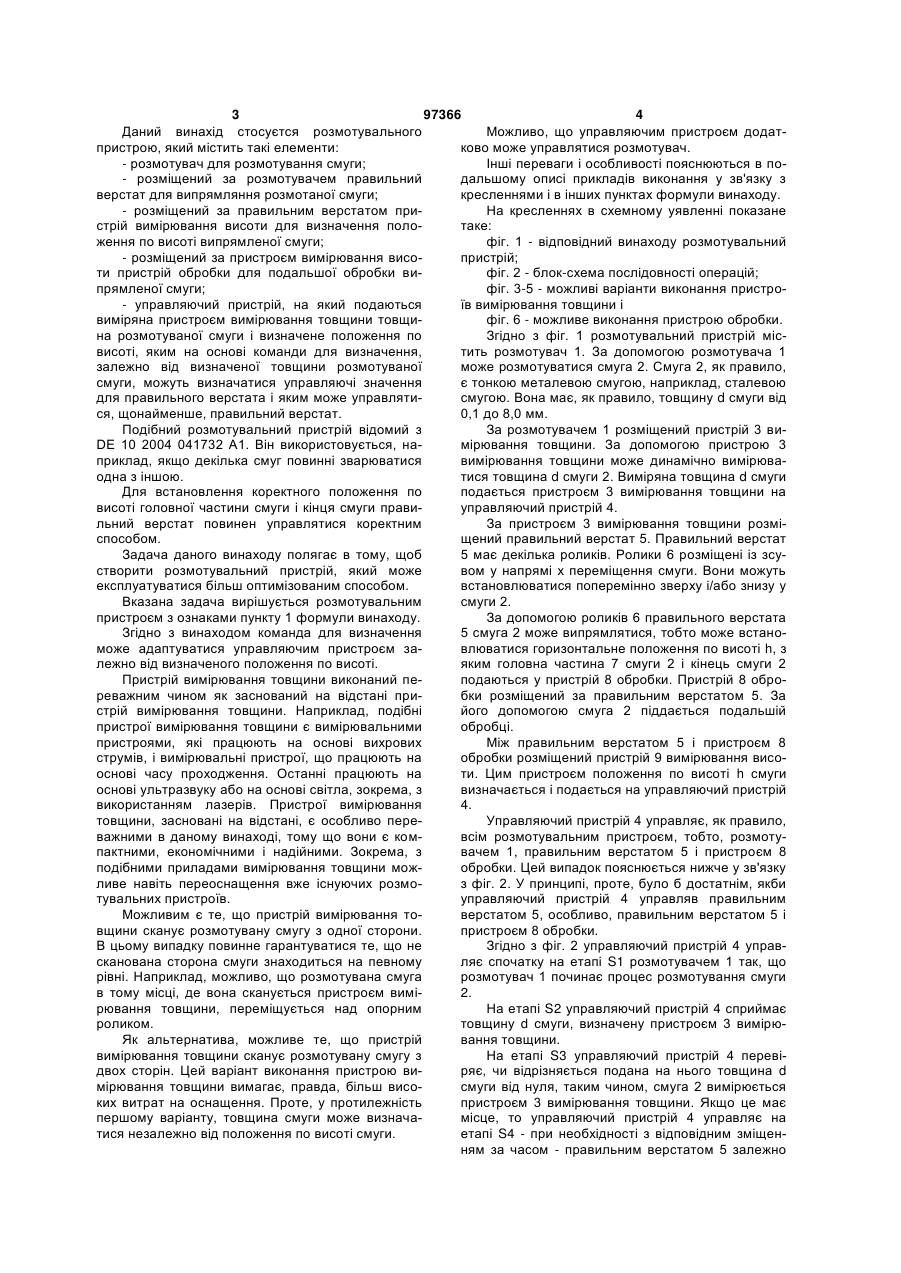
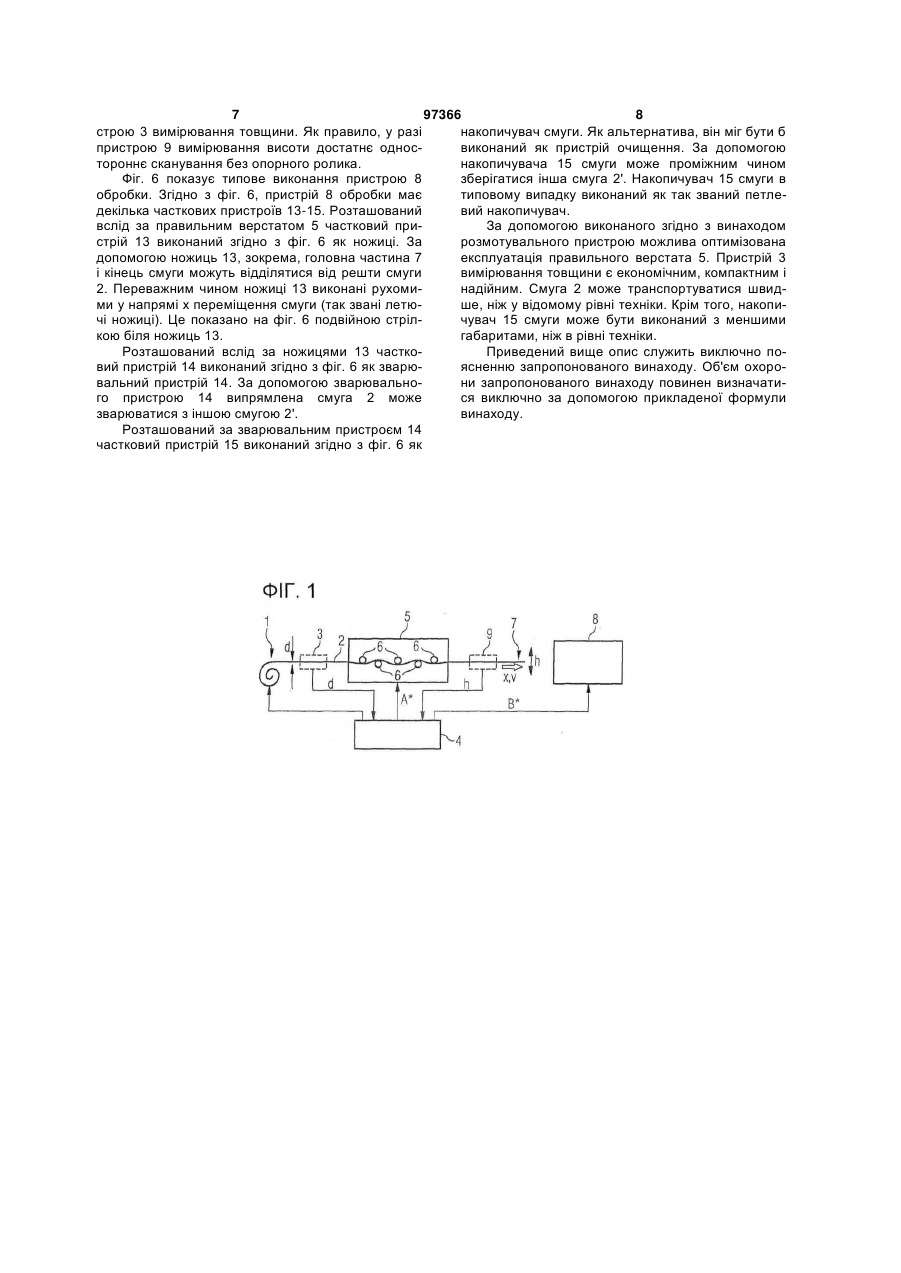
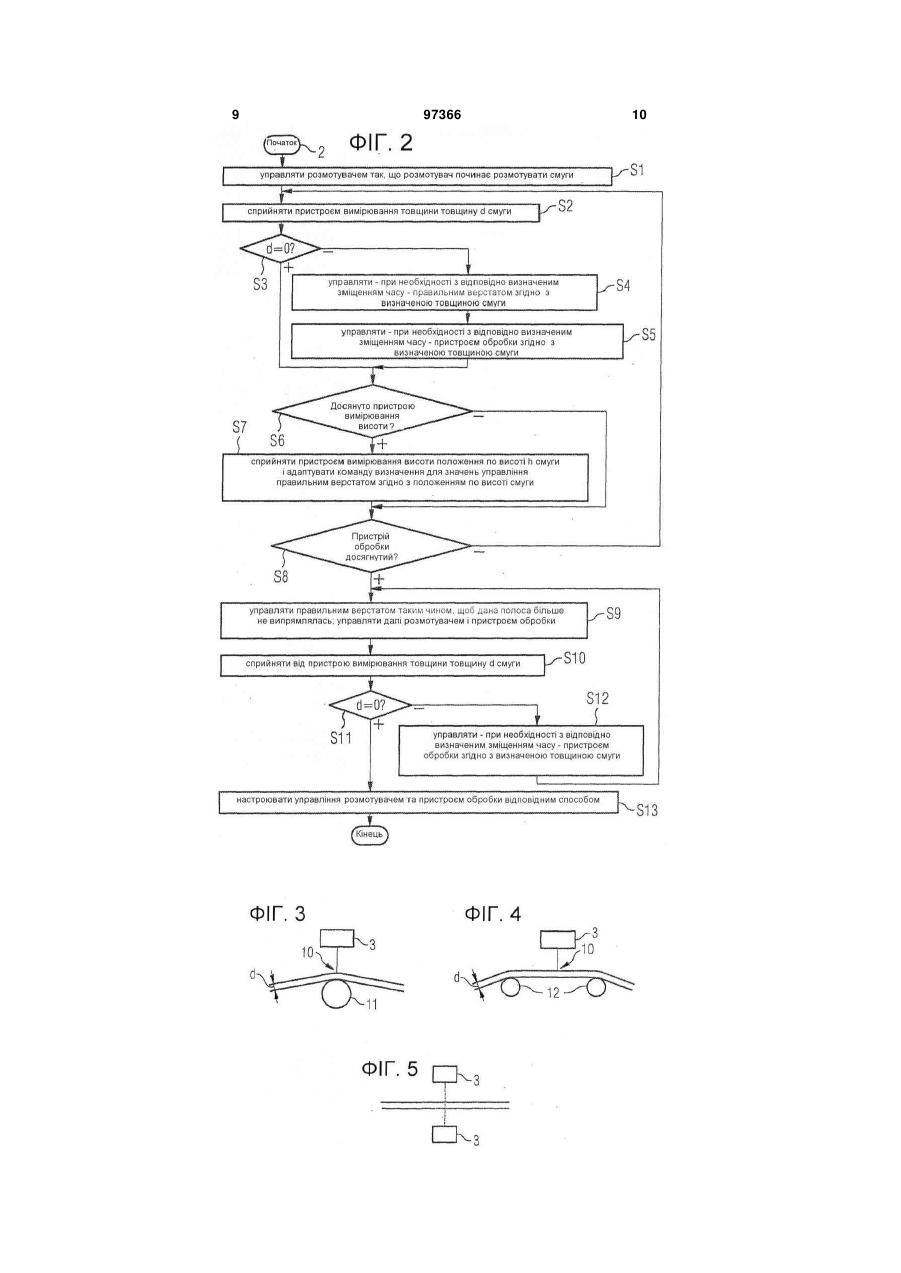
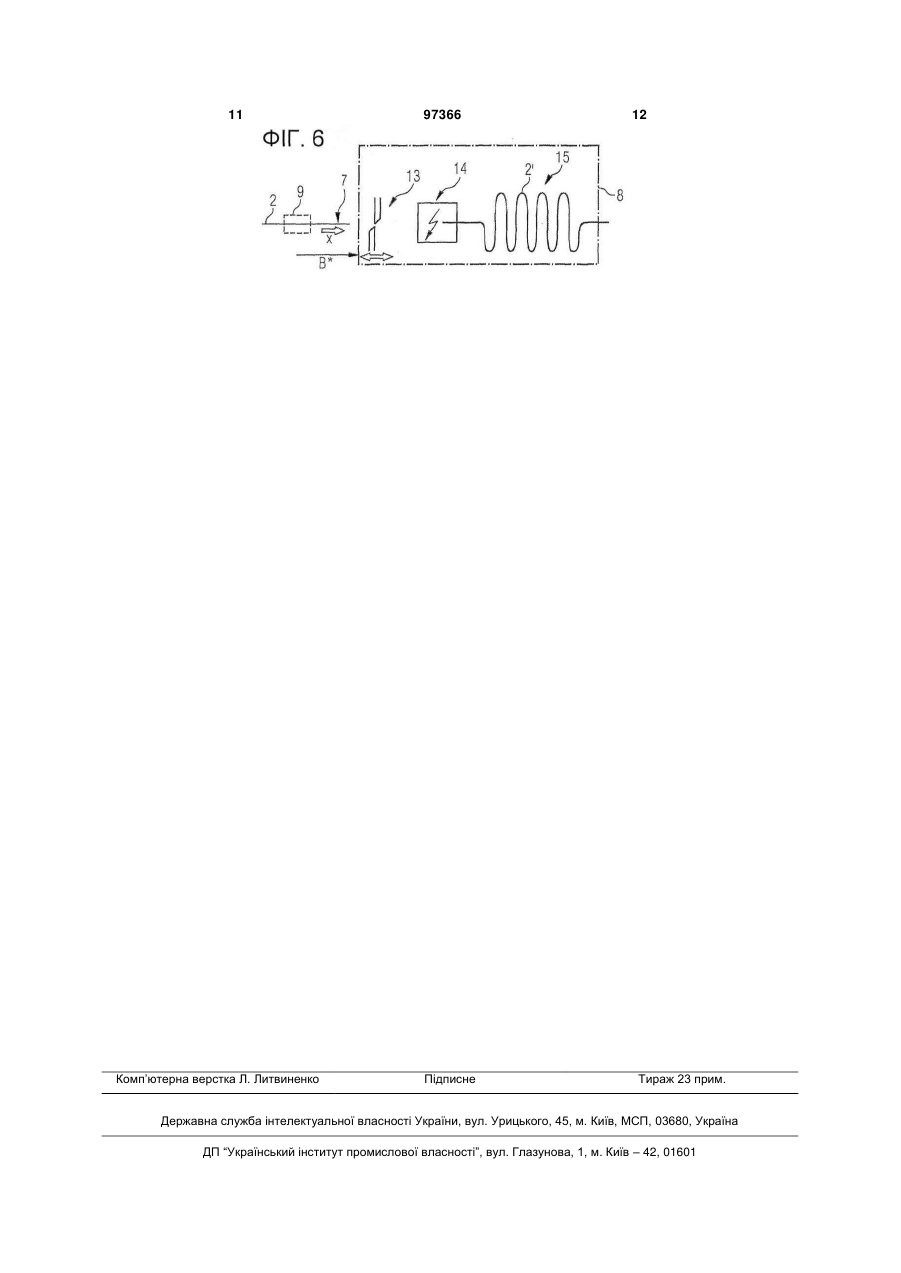
1. Розмотувальний пристрій, який містить такі елементи: - розмотувач (1) для розмотування смуги (2); - розміщений за розмотувачем (1) пристрій (3) вимірювання товщини для вимірювання товщини (d) розмотуваної смуги (2); - розміщений за пристроєм (3) вимірювання товщини правильний верстат (5) для випрямляння розмотуваної смуги (2); - розміщений за правильним верстатом (5) пристрій (9) вимірювання висоти для визначення положення по висоті (h) випрямленої смуги; - розміщений за пристроєм (9) вимірювання висоти обробний пристрій (8) для подальшої обробки випрямленої смуги (2); - керуючий пристрій (4), з'єднаний з пристроєм (3) вимірювання товщини (d) розмотуваної смуги (2) та з пристроєм (9) вимірювання положення по висоті (h) і виконаний зі здатністю на основі команди для визначення, залежно від визначеної товщини (d) розмотуваної смуги, визначати керуючі значення (А*) для правильного верстата (5) і керувати щонайменше правильним верстатом (5), 2 (19) 1 3 97366 4 Даний винахід стосуєтся розмотувального Можливо, що управляючим пристроєм додатпристрою, який містить такі елементи: ково може управлятися розмотувач. - розмотувач для розмотування смуги; Інші переваги і особливості пояснюються в по- розміщений за розмотувачем правильний дальшому описі прикладів виконання у зв'язку з верстат для випрямляння розмотаної смуги; кресленнями і в інших пунктах формули винаходу. - розміщений за правильним верстатом приНа кресленнях в схемному уявленні показане стрій вимірювання висоти для визначення полотаке: ження по висоті випрямленої смуги; фіг. 1 - відповідний винаходу розмотувальний - розміщений за пристроєм вимірювання висопристрій; ти пристрій обробки для подальшої обробки вифіг. 2 - блок-схема послідовності операцій; прямленої смуги; фіг. 3-5 - можливі варіанти виконання пристро- управляючий пристрій, на який подаються їв вимірювання товщини і виміряна пристроєм вимірювання товщини товщифіг. 6 - можливе виконання пристрою обробки. на розмотуваної смуги і визначене положення по Згідно з фіг. 1 розмотувальний пристрій місвисоті, яким на основі команди для визначення, тить розмотувач 1. За допомогою розмотувача 1 залежно від визначеної товщини розмотуваної може розмотуватися смуга 2. Смуга 2, як правило, смуги, можуть визначатися управляючі значення є тонкою металевою смугою, наприклад, сталевою для правильного верстата і яким може управлятисмугою. Вона має, як правило, товщину d смуги від ся, щонайменше, правильний верстат. 0,1 до 8,0 мм. Подібний розмотувальний пристрій відомий з За розмотувачем 1 розміщений пристрій 3 виDE 10 2004 041732 А1. Він використовується, намірювання товщини. За допомогою пристрою 3 приклад, якщо декілька смуг повинні зварюватися вимірювання товщини може динамічно вимірюваодна з іншою. тися товщина d смуги 2. Виміряна товщина d смуги Для встановлення коректного положення по подається пристроєм 3 вимірювання товщини на висоті головної частини смуги і кінця смуги правиуправляючий пристрій 4. льний верстат повинен управлятися коректним За пристроєм 3 вимірювання товщини розміспособом. щений правильний верстат 5. Правильний верстат Задача даного винаходу полягає в тому, щоб 5 має декілька роликів. Ролики 6 розміщені із зсустворити розмотувальний пристрій, який може вом у напрямі х переміщення смуги. Вони можуть експлуатуватися більш оптимізованим способом. встановлюватися поперемінно зверху і/або знизу у Вказана задача вирішується розмотувальним смуги 2. пристроєм з ознаками пункту 1 формули винаходу. За допомогою роликів 6 правильного верстата Згідно з винаходом команда для визначення 5 смуга 2 може випрямлятися, тобто може встаноможе адаптуватися управляючим пристроєм завлюватися горизонтальне положення по висоті h, з лежно від визначеного положення по висоті. яким головна частина 7 смуги 2 і кінець смуги 2 Пристрій вимірювання товщини виконаний пеподаються у пристрій 8 обробки. Пристрій 8 оброреважним чином як заснований на відстані прибки розміщений за правильним верстатом 5. За стрій вимірювання товщини. Наприклад, подібні його допомогою смуга 2 піддається подальшій пристрої вимірювання товщини є вимірювальними обробці. пристроями, які працюють на основі вихрових Між правильним верстатом 5 і пристроєм 8 струмів, і вимірювальні пристрої, що працюють на обробки розміщений пристрій 9 вимірювання висооснові часу проходження. Останні працюють на ти. Цим пристроєм положення по висоті h смуги основі ультразвуку або на основі світла, зокрема, з визначається і подається на управляючий пристрій використанням лазерів. Пристрої вимірювання 4. товщини, засновані на відстані, є особливо переУправляючий пристрій 4 управляє, як правило, важними в даному винаході, тому що вони є комвсім розмотувальним пристроєм, тобто, розмотупактними, економічними і надійними. Зокрема, з вачем 1, правильним верстатом 5 і пристроєм 8 подібними приладами вимірювання товщини можобробки. Цей випадок пояснюється нижче у зв'язку ливе навіть переоснащення вже існуючих розмоз фіг. 2. У принципі, проте, було б достатнім, якби тувальних пристроїв. управляючий пристрій 4 управляв правильним Можливим є те, що пристрій вимірювання товерстатом 5, особливо, правильним верстатом 5 і вщини сканує розмотувану смугу з одної сторони. пристроєм 8 обробки. В цьому випадку повинне гарантуватися те, що не Згідно з фіг. 2 управляючий пристрій 4 управсканована сторона смуги знаходиться на певному ляє спочатку на етапі S1 розмотувачем 1 так, що рівні. Наприклад, можливо, що розмотувана смуга розмотувач 1 починає процес розмотування смуги в тому місці, де вона сканується пристроєм вимі2. рювання товщини, переміщується над опорним На етапі S2 управляючий пристрій 4 сприймає роликом. товщину d смуги, визначену пристроєм 3 вимірюЯк альтернатива, можливе те, що пристрій вання товщини. вимірювання товщини сканує розмотувану смугу з На етапі S3 управляючий пристрій 4 перевідвох сторін. Цей варіант виконання пристрою виряє, чи відрізняється подана на нього товщина d мірювання товщини вимагає, правда, більш висосмуги від нуля, таким чином, смуга 2 вимірюється ких витрат на оснащення. Проте, у протилежність пристроєм 3 вимірювання товщини. Якщо це має першому варіанту, товщина смуги може визначамісце, то управляючий пристрій 4 управляє на тися незалежно від положення по висоті смуги. етапі S4 - при необхідності з відповідним зміщенням за часом - правильним верстатом 5 залежно 5 97366 6 від визначеної товщини d. Особливо, управляючий На етапі S10 управляючий пристрій 4 знов пристрій 4 в рамках етапу S4 на основі команд по сприймає товщину d смуги від пристрою 3 вимірювизначенню, залежно від визначеної товщини d вання товщини. розмотуваної смуги 2, визначити управляючі знаНа етапі S11 управляючий пристрій 4 перевічення А* для окремих роликів 6 правильного версряє, чи має визначена товщина d смуги значення, тата 5 і передати визначені управляючі значення яке дорівнює нулю. А* на правильний верстат 5. Якщо товщина d смуги має значення, відмінне На етапі S5 управляючий пристрій 4 може від нуля, то управляючий пристрій 4 управляє на при необхідності з відповідно певним зміщенням етапі S12 - при необхідності з відповідним зміщенза часом - визначити управляючі значення В* для ням за часом - пристроєм 8 обробки згідно з випристрою 8 обробки і передати на пристрій 8 обзначеною товщиною d смуги 2. Наприклад, може робки. Управляючі значення В* для пристрою 8 аналогічно випадку з головною частиною 7 смуги обробки можуть також залежати від визначеної визначатися, з якого моменту часу товщина d смутовщини d розмотуваної смуги 2. Наприклад, може ги відхиляється від номінальної товщини d* смуги визначатися момент часу, з якого дійсна товщина більш ніж на допустимий допуск d товщини. Приd смуги відхиляється від номінальної товщини d* стрій 8 обробки може в цьому випадку, наприклад, смуги максимально тільки на дозволений допуск управлятися таким чином, що він відділяє не покаd товщини (або менше). Пристрій 8 обробки може заний на кресленні кінець смуги від решти смуги 2. в цьому випадку, наприклад, управлятися так, щоб Потім управляючий пристрій 4 повертається до на відповідному місці смуги 2 головна частина 7 етапу S9. смуги відділялася від решти смуги 2. Додатково Якщо певна товщина d смуги досягла значенможливо встановлювати відстань, на якій знахоня, яке дорівнює нулю, то кінець смуги пройшов дяться ножі відповідного відокремлювального примимо пристрою 3 вимірювання товщини. В цьому строю, у напрямі х переміщення смуги, залежно випадку управляючий пристрій 4 на етапі S13 навід визначеної товщини d розмотуваної смуги 2. строює управління розмотувачем 1 і пристроєм 8 На етапі S6 управляючий пристрій 4 перевіобробки відповідним способом. Наприклад, може ряє, чи досягла вже смуга 2 пристрою 9 вимірюзнижуватися швидкість v смуги. Також знов може вання висоти. Це може визначатися, наприклад, поновлюватися управління правильним верстатом простим, загальновідомим для фахівців відстежу5. ванням шляху. Пристрій 3 вимірювання товщини може, у На етапі S7 управляючий пристрій 4 сприймає принципі, виконуватися будь-яким чином. Напривизначене пристроєм 9 вимірювання висоти полоклад, воно може працювати з випромінюванням, ження по висоті h випрямленої смуги 2 і адаптує, яке проникає в смугу 2. Наприклад, подібне визалежно від визначеного положення по висоті h, промінювання може бути рентгенівським випромікоманду на визначення, на підставі якої він визнанюванням і гамма-випромінюванням. Проте перечає управляючі значення А* для правильного верважним чином пристрій вимірювання товщини стата 5. Зокрема, управляючий пристрій 4 може виконаний як пристрій 3 вимірювання товщини, що порівнювати визначене положення по висоті h з базується на часі проходження. Подібні пристрої 3 номінальним положенням по висоті h* і на основі вимірювання товщини працюють не з проникаюпорівняння доводити (адаптувати) команду на вичим випромінюванням, а, наприклад, з випромінюзначення. ванням, яке відбивається від смуги. Наприклад, Доводка (адаптація) команди на визначення, відповідними випромінюваннями є звук (переважяк така, відома фахівцям. Наприклад, за цими но ультразвук), а також світло, зокрема, лазерне принципами працюють адаптивні способи регулюсвітло. Довжина хвилі вживаного світла може знавання і засновані на моделі способи визначення. ходитися, у відповідному випадку, у видимому, На етапі S8 управляючий пристрій 4 перевіінфрачервоному або навіть в ультрафіолетовому ряє, чи досягла смуга 2 пристрою 8 обробки. І ця діапазоні. перевірка може здійснюватися, наприклад, за доФіг. 3-5 показують приклади пристроїв 3 виміпомогою відстежування шляху. Як альтернатива, рювання товщини, які ґрунтуються на часі прохоможливо, що на управляючий пристрій 4 від придження. строю 8 обробки передається відповідне повідомЗгідно з фіг. 3, пристрій 3 вимірювання товщилення зворотного зв'язку. ни сканує розмотувану смугу 2 в місці 10 скануЯкщо смуга 2 ще не досягла пристрою 8 обровання з одної сторони. Поняття «місце скануванбки, то управляючий пристрій 4 повертається до ня» стосується в зв'язку з цим не місця смуги, де етапу S2. Якщо смуга 2 вже досягла пристрою 8 вона сканується, а позиції у напрямі х переміщенобробки, то управляючий пристрій 4 продовжує ня смуги, на якій смуга 2 сканується. виконання способу на етапі S9. Згідно з фіг. 3, розмотувана смуга 2 проходить На етапі S9 управляючий пристрій 4 управляє в місці 10 сканування над опорним роликом 11. правильним верстатом 5 таким чином, що він біЗгідно з фіг. 4, місце 10 сканування знаходиться льше не випрямляє смугу 2. Зокрема, ролики 6 між двома направляючими роликами 12. відводяться від смуги 2. Проте управління розмоЗгідно з фіг. 5, пристрій 3 вимірювання товщитувачем 1 і пристроєм 8 обробки в рамках етапу ни сканує розмотувану смугу 2 в місці 10 скануS9 зберігається. Залежно від подальшої обробки, вання з двох сторін. В цьому випадку на місці 10 в рамках етапу S9 може, наприклад, підвищуватисканування може не бути ніякого опорного ролика. ся швидкість v смуги, з якою смуга 2 розмотується. Пристрій 9 вимірювання висоти може - якщо він передбачений - бути виконаний подібно при 7 97366 8 строю 3 вимірювання товщини. Як правило, у разі накопичувач смуги. Як альтернатива, він міг бути б пристрою 9 вимірювання висоти достатнє односвиконаний як пристрій очищення. За допомогою тороннє сканування без опорного ролика. накопичувача 15 смуги може проміжним чином Фіг. 6 показує типове виконання пристрою 8 зберігатися інша смуга 2'. Накопичувач 15 смуги в обробки. Згідно з фіг. 6, пристрій 8 обробки має типовому випадку виконаний як так званий петледекілька часткових пристроїв 13-15. Розташований вий накопичувач. вслід за правильним верстатом 5 частковий приЗа допомогою виконаного згідно з винаходом стрій 13 виконаний згідно з фіг. 6 як ножиці. За розмотувального пристрою можлива оптимізована допомогою ножиць 13, зокрема, головна частина 7 експлуатація правильного верстата 5. Пристрій 3 і кінець смуги можуть відділятися від решти смуги вимірювання товщини є економічним, компактним і 2. Переважним чином ножиці 13 виконані рухоминадійним. Смуга 2 може транспортуватися швидми у напрямі х переміщення смуги (так звані летюше, ніж у відомому рівні техніки. Крім того, накопичі ножиці). Це показано на фіг. 6 подвійною стрілчувач 15 смуги може бути виконаний з меншими кою біля ножиць 13. габаритами, ніж в рівні техніки. Розташований вслід за ножицями 13 часткоПриведений вище опис служить виключно повий пристрій 14 виконаний згідно з фіг. 6 як зварюясненню запропонованого винаходу. Об'єм охоровальний пристрій 14. За допомогою зварювальнони запропонованого винаходу повинен визначатиго пристрою 14 випрямлена смуга 2 може ся виключно за допомогою прикладеної формули зварюватися з іншою смугою 2'. винаходу. Розташований за зварювальним пристроєм 14 частковий пристрій 15 виконаний згідно з фіг. 6 як 9 97366 10 11 Комп’ютерна верстка Л. Литвиненко 97366 Підписне 12 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюUnwinding device
Автори англійськоюSchulze Bertram
Назва патенту російськоюРазматывающее устройство
Автори російськоюШульце Бертрам
МПК / Мітки
МПК: B21C 47/16, B21D 1/02
Мітки: розмотувальний, пристрій
Код посилання
<a href="https://ua.patents.su/6-97366-rozmotuvalnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Розмотувальний пристрій</a>
Розмотувальний пристрій для канатозвивальної машини

Номер патенту: 38321
Опубліковано: 15.05.2001
Автори: Хромов Єгор Володимирович, Хромов Володимир Гаврилович, Ганіна Лідія Кирилівна, Щербак Олександр Семенович
МПК: D07B 7/00
Мітки: пристрій, машини, канатозвивальної, розмотувальний
Текст:
...виконаними, наприклад, у вигляді контргайок 14. Важіль 12 в цьому випадку має різьблення, фіксатори втулки можуть бути виконані іншої конструкції, наприклад, у вигляді підпружиненого стержня (на кресленні не показано). Вісь 10 повороту важелів паралельна осі 2 обертання тримача живильної котушки. Пристрій за винаходом працює таким чином. У тримачі 2 встановлюють живильну котушку 15 з навитим на неї дротом 16. Котушка 15 сполучається з...
Змотувально-розмотувальний пристрій

Номер патенту: 1415
Опубліковано: 25.03.1994
Автори: Мацко Григорій Костянтинович, Чуприна Борис Гнатович
МПК: G01V 3/15
Мітки: пристрій, змотувально-розмотувальний
Пристрій для вимірювання натягнення металу на ділянках поперечного перерізу смуги
Номер патенту: 30101
Опубліковано: 11.02.2008
Автори: Скуратов Євген Георгійович, Клевцов Олег Михайлович, Ніколенко Андрій Георгійович, Тилик Василь Трохимович
МПК: B21B 38/00
Мітки: вимірювання, пристрій, смуги, металу, поперечного, натягнення, перерізу, ділянках
Формула / Реферат:
Пристрій для вимірювання натягнення металу на ділянках поперечного перерізу смуги, що містить вимірювальний ролик, виконаний у вигляді трьох секцій, встановлених на опорах, і вимірники зусиль, який відрізняється тим, що центральна секція ролика жорстко закріплена на валу з двома підшипниковими опорами, що знаходяться у контакті з вимірниками зусиль, а крайні секції встановлені на двох підшипникових опорах кожна, при цьому одна опора...
Пристрій для посадки літального апарата
Номер патенту: 34342
Опубліковано: 11.08.2008
Автори: Слєпов Лев Іванович, Гладков Віктор Михайлович, Якобінчук Олександр Вікторович, Куровська Тетяна Юріївна, Блаженний Валерій Іванович
МПК: B64F 1/00
Мітки: літального, посадки, апарата, пристрій
Формула / Реферат:
1. Пристрій для посадки літального апарата, який містить посадкову смугу, гальмівний пристрій, який відрізняється тим, що додатково містить транспортну платформу, що містить двигун, пристрій вимірювання координат і швидкості літального апарата, пристрій керування, приймач, при цьому посадкова смуга виконана як пристрій фіксації літального апарата, причому гальмівний пристрій розташовано на транспортній платформі.2. Пристрій для посадки...
Змієподібний спіральний драбинчастий стент (варіанти) і смуга для створення стента
Номер патенту: 68403
Опубліковано: 16.08.2004
Автори: Пінчасик Грегорі, Ріхтер Якоб
МПК: A61F 2/06
Мітки: стента, стент, створення, драбинчастий, смуга, варіанти, спіральний, змієподібний
Формула / Реферат:
1. Стент, виконаний зі звитої у вигляді ряду спіральних витків смуги, яка має поздовжню вісь, причому смуга містить щонайменше дві бічних смужки, кожна з яких має змієподібну структуру з рядом вигинів, при цьому щонайменше дві бічні смужки смуги сполучені одна з одною поперечними розпірками, які не перпендикулярні до поздовжньої осі смуги, і при цьому, після розгортання стента, вигини щонайменше двох бічних смужок мають можливість розгинання...
Попередній патент: Матеріал у формі листа, який має вікно, спосіб його виготовлення і документ із захистом, який має його
Наступний патент: Автоматичне змащування форм для виготовлення порожнистих скляних виробів
Випадковий патент: Сервоклапан з пам'яттю положення