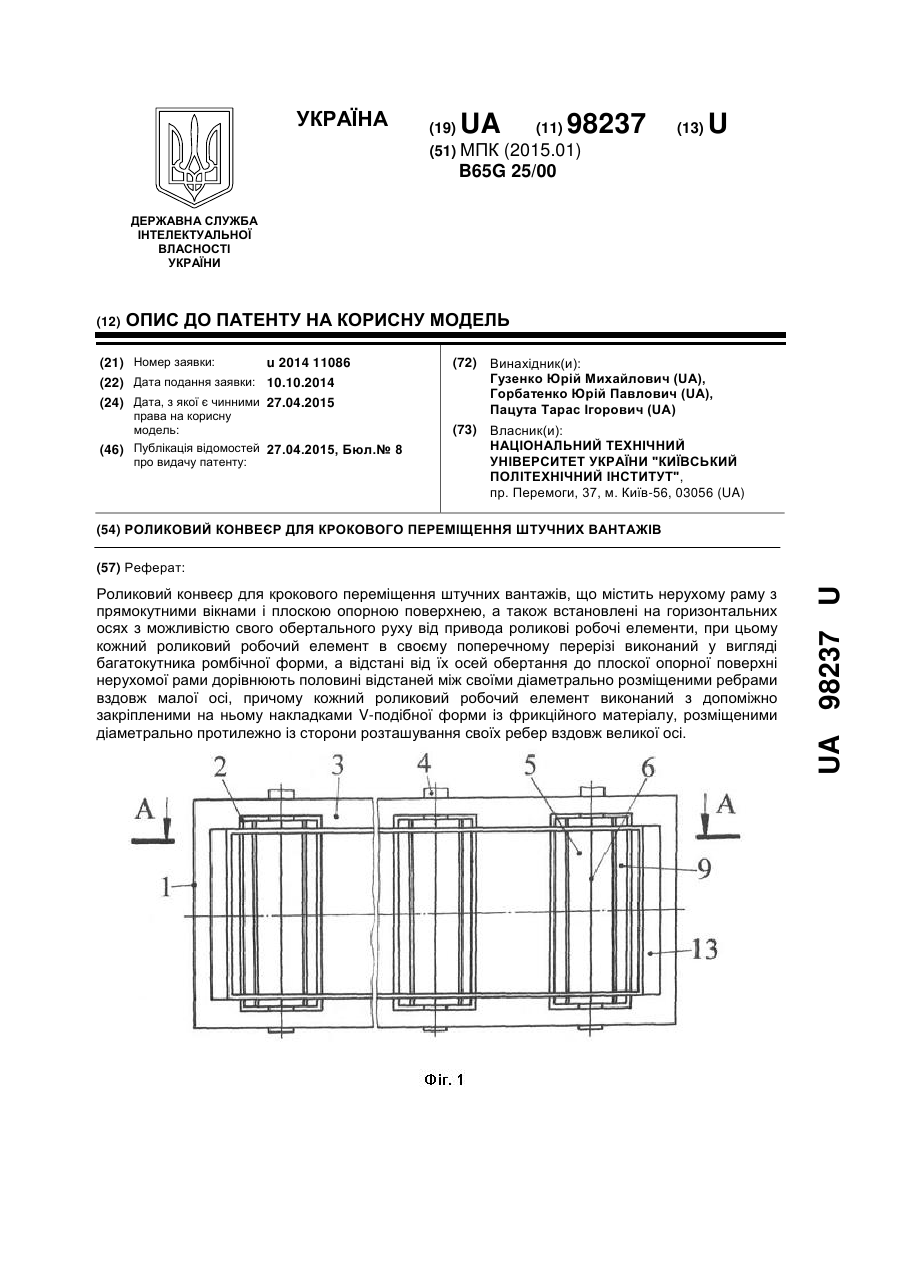
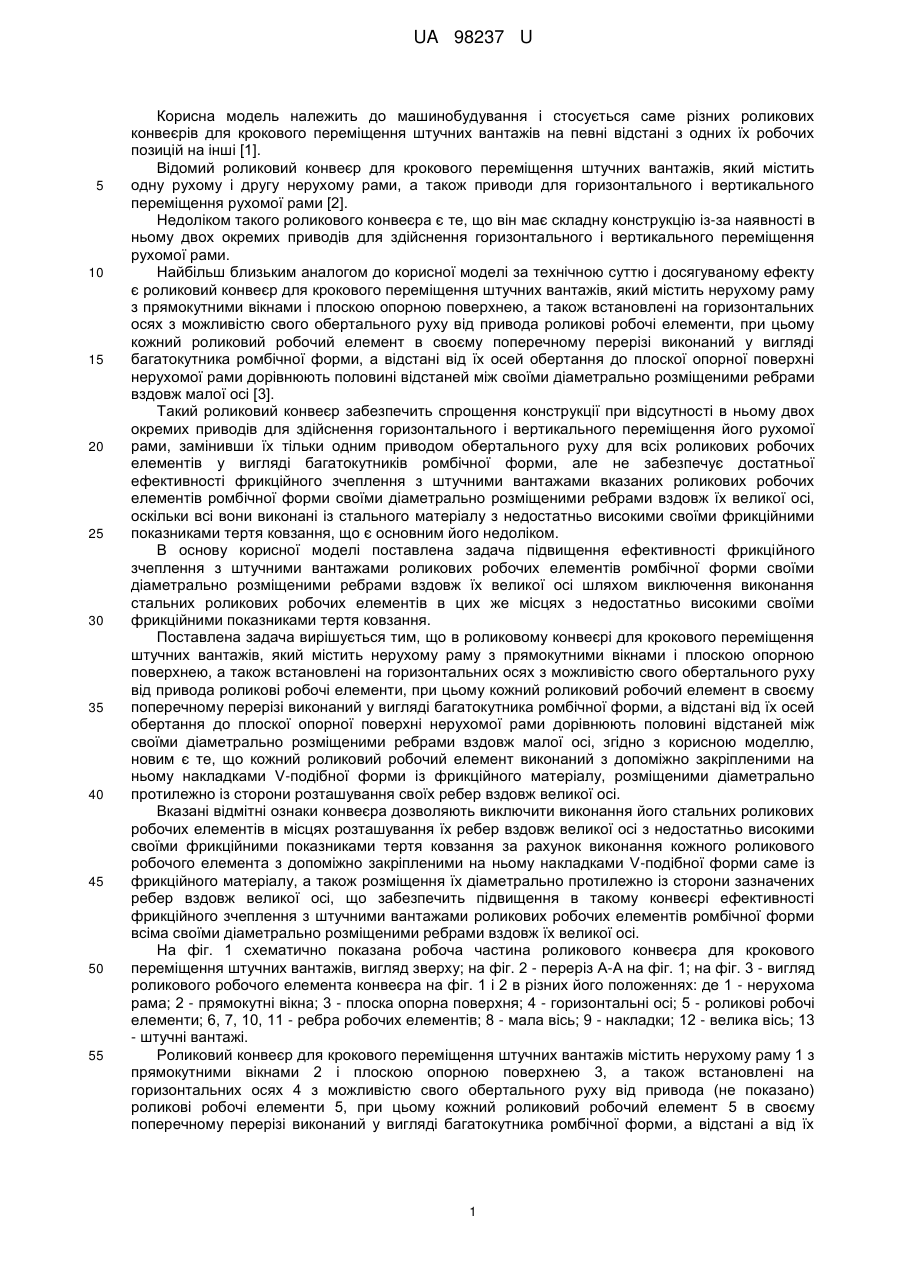
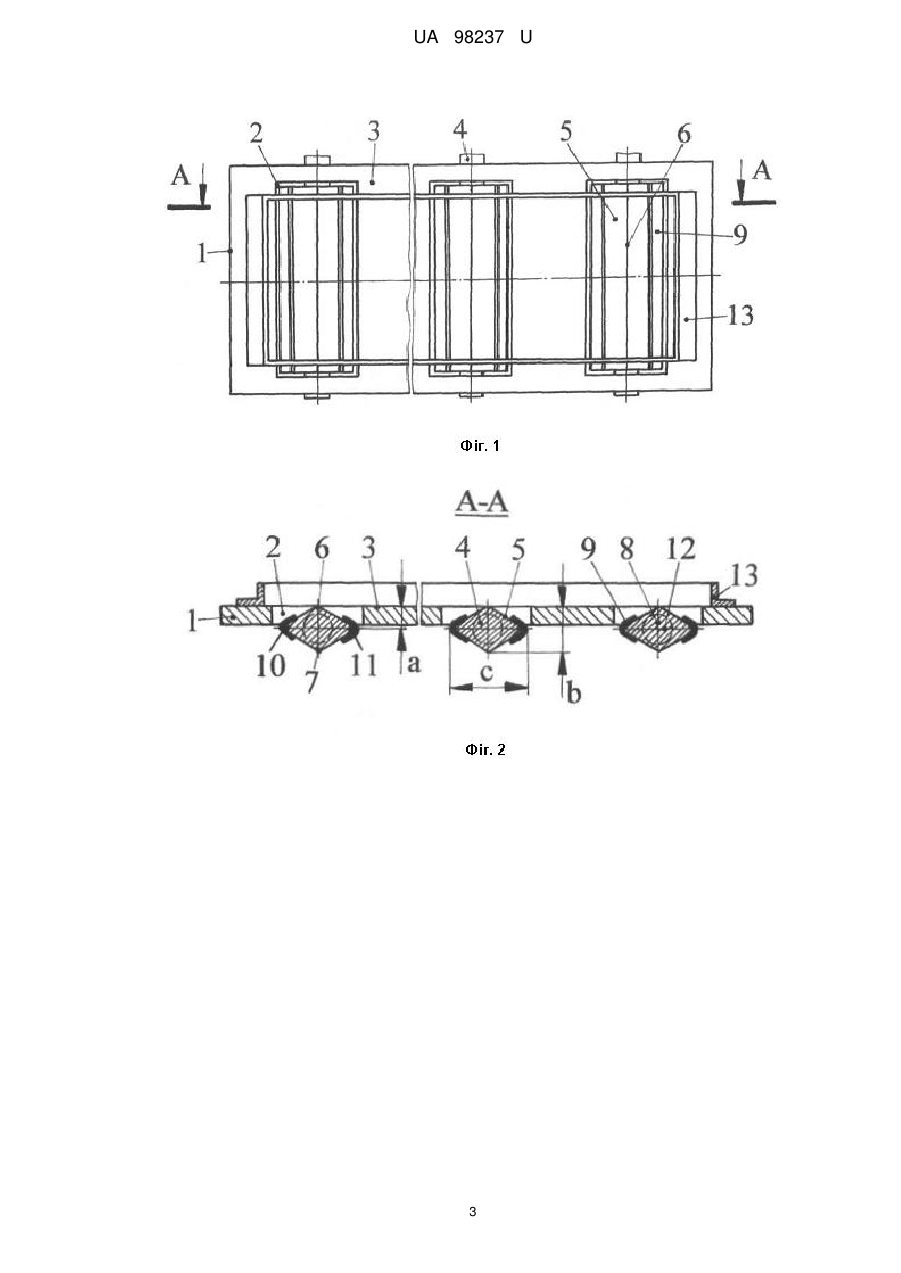
Роликовий конвеєр для крокового переміщення штучних вантажів
Номер патенту: 98237
Опубліковано: 27.04.2015
Автори: Гузенко Юрій Михайлович, Горбатенко Юрій Павлович, Пацута Тарас Ігорович

Формула / Реферат
Роликовий конвеєр для крокового переміщення штучних вантажів, що містить нерухому раму з прямокутними вікнами і плоскою опорною поверхнею, а також встановлені на горизонтальних осях з можливістю свого обертального руху від привода роликові робочі елементи, при цьому кожний роликовий робочий елемент в своєму поперечному перерізі виконаний у вигляді багатокутника ромбічної форми, а відстані від їх осей обертання до плоскої опорної поверхні нерухомої рами дорівнюють половині відстаней між своїми діаметрально розміщеними ребрами вздовж малої осі, який відрізняється тим, що кожний роликовий робочий елемент виконаний з допоміжно закріпленими на ньому накладками V-подібної форми із фрикційного матеріалу, розміщеними діаметрально протилежно із сторони розташування своїх ребер вздовж великої осі.
Текст
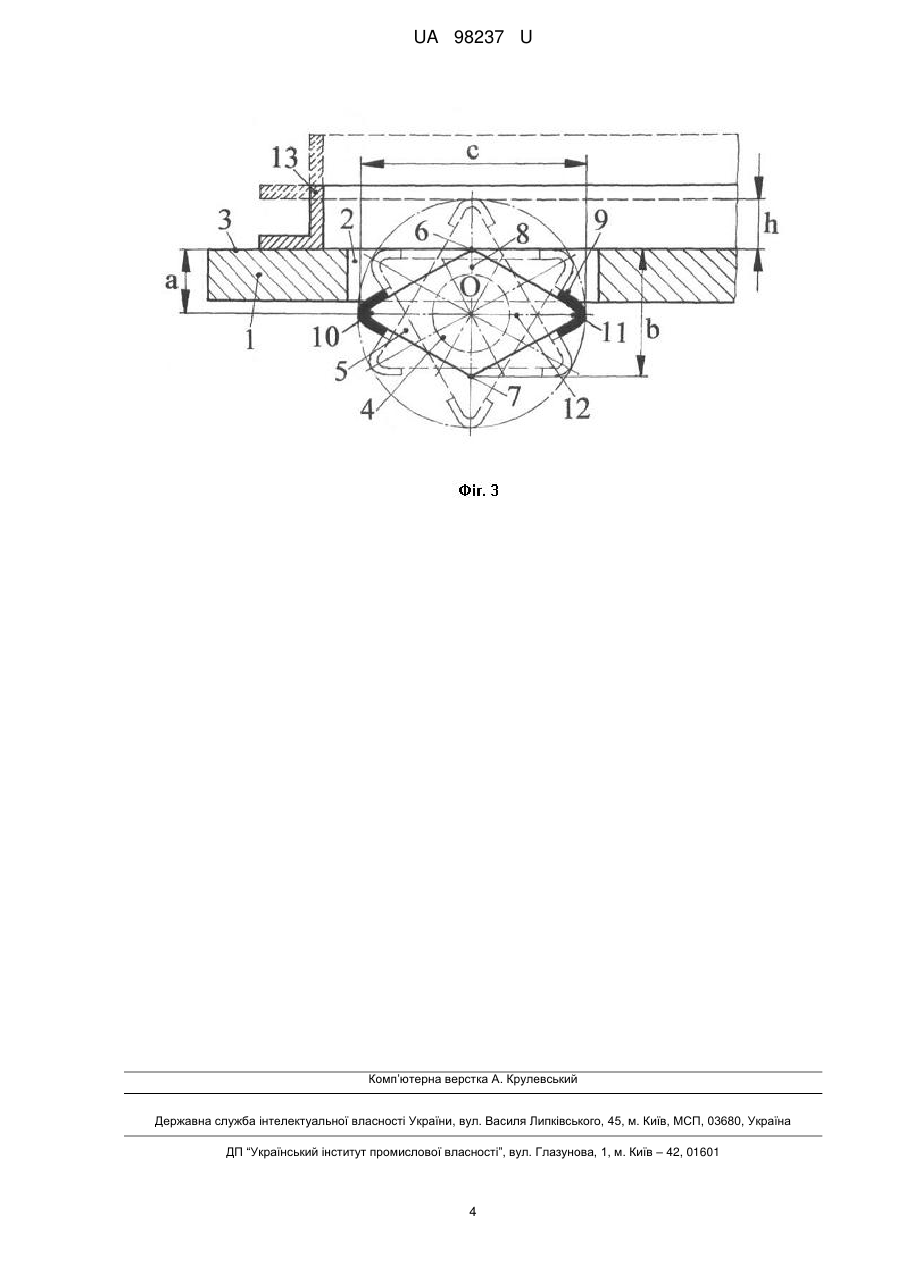
Реферат: UA 98237 U UA 98237 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до машинобудування і стосується саме різних роликових конвеєрів для крокового переміщення штучних вантажів на певні відстані з одних їх робочих позицій на інші [1]. Відомий роликовий конвеєр для крокового переміщення штучних вантажів, який містить одну рухому і другу нерухому рами, а також приводи для горизонтального і вертикального переміщення рухомої рами [2]. Недоліком такого роликового конвеєра є те, що він має складну конструкцію із-за наявності в ньому двох окремих приводів для здійснення горизонтального і вертикального переміщення рухомої рами. Найбільш близьким аналогом до корисної моделі за технічною суттю і досягуваному ефекту є роликовий конвеєр для крокового переміщення штучних вантажів, який містить нерухому раму з прямокутними вікнами і плоскою опорною поверхнею, а також встановлені на горизонтальних осях з можливістю свого обертального руху від привода роликові робочі елементи, при цьому кожний роликовий робочий елемент в своєму поперечному перерізі виконаний у вигляді багатокутника ромбічної форми, а відстані від їх осей обертання до плоскої опорної поверхні нерухомої рами дорівнюють половині відстаней між своїми діаметрально розміщеними ребрами вздовж малої осі [3]. Такий роликовий конвеєр забезпечить спрощення конструкції при відсутності в ньому двох окремих приводів для здійснення горизонтального і вертикального переміщення його рухомої рами, замінивши їх тільки одним приводом обертального руху для всіх роликових робочих елементів у вигляді багатокутників ромбічної форми, але не забезпечує достатньої ефективності фрикційного зчеплення з штучними вантажами вказаних роликових робочих елементів ромбічної форми своїми діаметрально розміщеними ребрами вздовж їх великої осі, оскільки всі вони виконані із стального матеріалу з недостатньо високими своїми фрикційними показниками тертя ковзання, що є основним його недоліком. В основу корисної моделі поставлена задача підвищення ефективності фрикційного зчеплення з штучними вантажами роликових робочих елементів ромбічної форми своїми діаметрально розміщеними ребрами вздовж їх великої осі шляхом виключення виконання стальних роликових робочих елементів в цих же місцях з недостатньо високими своїми фрикційними показниками тертя ковзання. Поставлена задача вирішується тим, що в роликовому конвеєрі для крокового переміщення штучних вантажів, який містить нерухому раму з прямокутними вікнами і плоскою опорною поверхнею, а також встановлені на горизонтальних осях з можливістю свого обертального руху від привода роликові робочі елементи, при цьому кожний роликовий робочий елемент в своєму поперечному перерізі виконаний у вигляді багатокутника ромбічної форми, а відстані від їх осей обертання до плоскої опорної поверхні нерухомої рами дорівнюють половині відстаней між своїми діаметрально розміщеними ребрами вздовж малої осі, згідно з корисною моделлю, новим є те, що кожний роликовий робочий елемент виконаний з допоміжно закріпленими на ньому накладками V-подібної форми із фрикційного матеріалу, розміщеними діаметрально протилежно із сторони розташування своїх ребер вздовж великої осі. Вказані відмітні ознаки конвеєра дозволяють виключити виконання його стальних роликових робочих елементів в місцях розташування їх ребер вздовж великої осі з недостатньо високими своїми фрикційними показниками тертя ковзання за рахунок виконання кожного роликового робочого елемента з допоміжно закріпленими на ньому накладками V-подібної форми саме із фрикційного матеріалу, а також розміщення їх діаметрально протилежно із сторони зазначених ребер вздовж великої осі, що забезпечить підвищення в такому конвеєрі ефективності фрикційного зчеплення з штучними вантажами роликових робочих елементів ромбічної форми всіма своїми діаметрально розміщеними ребрами вздовж їх великої осі. На фіг. 1 схематично показана робоча частина роликового конвеєра для крокового переміщення штучних вантажів, вигляд зверху; на фіг. 2 - переріз А-А на фіг. 1; на фіг. 3 - вигляд роликового робочого елемента конвеєра на фіг. 1 і 2 в різних його положеннях: де 1 - нерухома рама; 2 - прямокутні вікна; 3 - плоска опорна поверхня; 4 - горизонтальні осі; 5 - роликові робочі елементи; 6, 7, 10, 11 - ребра робочих елементів; 8 - мала вісь; 9 - накладки; 12 - велика вісь; 13 - штучні вантажі. Роликовий конвеєр для крокового переміщення штучних вантажів містить нерухому раму 1 з прямокутнимивікнами 2 і плоскою опорною поверхнею 3, а також встановлені на горизонтальних осях 4 з можливістю свого обертального руху від привода (не показано) роликові робочі елементи 5, при цьому кожний роликовий робочий елемент 5 в своєму поперечному перерізі виконаний у вигляді багатокутника ромбічної форми, а відстані а від їх 1 UA 98237 U 5 10 15 20 25 30 35 40 осей обертання О до плоскої опорної поверхні 3 нерухомої рами 1 дорівнюють половині відстаней b між своїми діаметрально розміщеними ребрами 6, 7 вздовж малої осі 8. Крім цього, кожний роликовий робочий елемент 5 виконаний з допоміжно закріпленими на ньому накладками 9 V-подібної форми із фрикційного матеріалу, розміщеними діаметрально протилежно із сторони розташування своїх ребер 10, 11 вздовж великої осі 12. В результаті такого виконання конвеєра відстані а від осей обертання О роликових робочих елементів 5 до плоскої опорної поверхні 3 нерухомої рами 1 менше половини відстаней с між діаметрально розміщеними ребрами накладок 9 вздовж їх великої осі 12, при цьому всі зазначені роликові робочі елементи 5 встановлюються до плоскої опорної поверхні 3 рами 1 так, щоб коли одна із плоских граней вказаних накладок 9 V-подібної форми займає горизонтальне положення, то між нею та площиною опорної поверхні 3 рами 1 не утворювався зазор, а штучні вантажі 13 нерухомо розміщувалися на цій же рамі 1. При взаємодії накладок 9 роликових робочих елементів 5 із штучними вантажами 13 вони плавно піднімаються над плоскою опорною поверхнею 3 рами 1 на певну висоту h, а потім плавно опускаються і знову нерухомо розміщуються на ній. Обертальний рух роликових робочих елементів 5 здійснюється від свого привода (не показано), який складається з електродвигуна та необхідних для з'єднання його з вказаними роликовими робочими елементами 5 редукторів та відкритих механічних передач з використанням з'єднувальних муфт. Для забезпечення кінематичного зв'язку вибраного редуктора привода конвеєра з роликовими робочими елементами 5 використовується звичайна ланцюгова передача з встановленими на їх осях зірочками та обхвачуючим їх втулковороликовим ланцюгом, при цьому зазначений редуктор привода може бути вибраним конічним або черв'ячним. При роботі такого конвеєра всі його роликові робочі елементи 5 по черзі можуть займати свої положення з розміщенням плоских граней закріплених на них накладок 9 V-подібної форми саме із фрикційного матеріалу не вище рівня плоскої опорної поверхні 3 рами 1 і вище над нею своїми частинами із сторони їх вершин. В одних таких положеннях всі штучні вантажі 13 будуть знаходитися нерухомо на плоскій опорній поверхні 3 рами 1 і в других таких положеннях будуть переміщатися вздовж неї на певні відстані з необхідним кроком, тобто при синхронному обертальному русі всіх роликових робочих елементів 5 вони своїми фрикційними накладками 9 почергово вступають в контактну взаємодію із штучними вантажами 13. Удосконалений роликовий конвеєр для крокового переміщення штучних вантажів дозволить підвищити ефективність фрикційного зчеплення з ними своїх роликових робочих елементів ромбічної форми через закріплені на них фрикційні накладки вздовж їх великої осі. Джерела інформації: 1. Спиваковский А.О., Дьячков В.К. Транспортирующие машины. - М.: Машиностроение, 1968. - 504 с. 2. Вейсман В.Ф. Шагающие конвейеры. - М.: Машиностроение, 1967. - С. 26, рис. 11. 3. Патент України на корисну модель № 93252, МПК В 65 G 25/00. Роликовий конвеєр для крокового переміщення штучних вантажів / Ю.М. Гузенко, Ю.П. Горбатенко; Національний технічний університет України «Київський політехнічний інститут». - Опубл. 25.09.2014. Бюл. № 18. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 Роликовий конвеєр для крокового переміщення штучних вантажів, що містить нерухому раму з прямокутними вікнами і плоскою опорною поверхнею, а також встановлені на горизонтальних осях з можливістю свого обертального руху від привода роликові робочі елементи, при цьому кожний роликовий робочий елемент в своєму поперечному перерізі виконаний у вигляді багатокутника ромбічної форми, а відстані від їх осей обертання до плоскої опорної поверхні нерухомої рами дорівнюють половині відстаней між своїми діаметрально розміщеними ребрами вздовж малої осі, який відрізняється тим, що кожний роликовий робочий елемент виконаний з допоміжно закріпленими на ньому накладками V-подібної форми із фрикційного матеріалу, розміщеними діаметрально протилежно із сторони розташування своїх ребер вздовж великої осі. 2 UA 98237 U 3 UA 98237 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюHorbatenko Yurii Pavlovych
Автори російськоюГорбатенко Юрий Павлович
МПК / Мітки
МПК: B65G 25/00
Мітки: штучних, вантажів, переміщення, конвеєр, крокового, роликовий
Код посилання
<a href="https://ua.patents.su/6-98237-rolikovijj-konveehr-dlya-krokovogo-peremishhennya-shtuchnikh-vantazhiv.html" target="_blank" rel="follow" title="База патентів України">Роликовий конвеєр для крокового переміщення штучних вантажів</a>
Роликовий конвеєр для крокового переміщення штучних вантажів
Номер патенту: 93252
Опубліковано: 25.09.2014
Автори: Гузенко Юрій Михайлович, Горбатенко Юрій Павлович
МПК: B65G 25/00
Мітки: переміщення, вантажів, крокового, конвеєр, роликовий, штучних
Формула / Реферат:
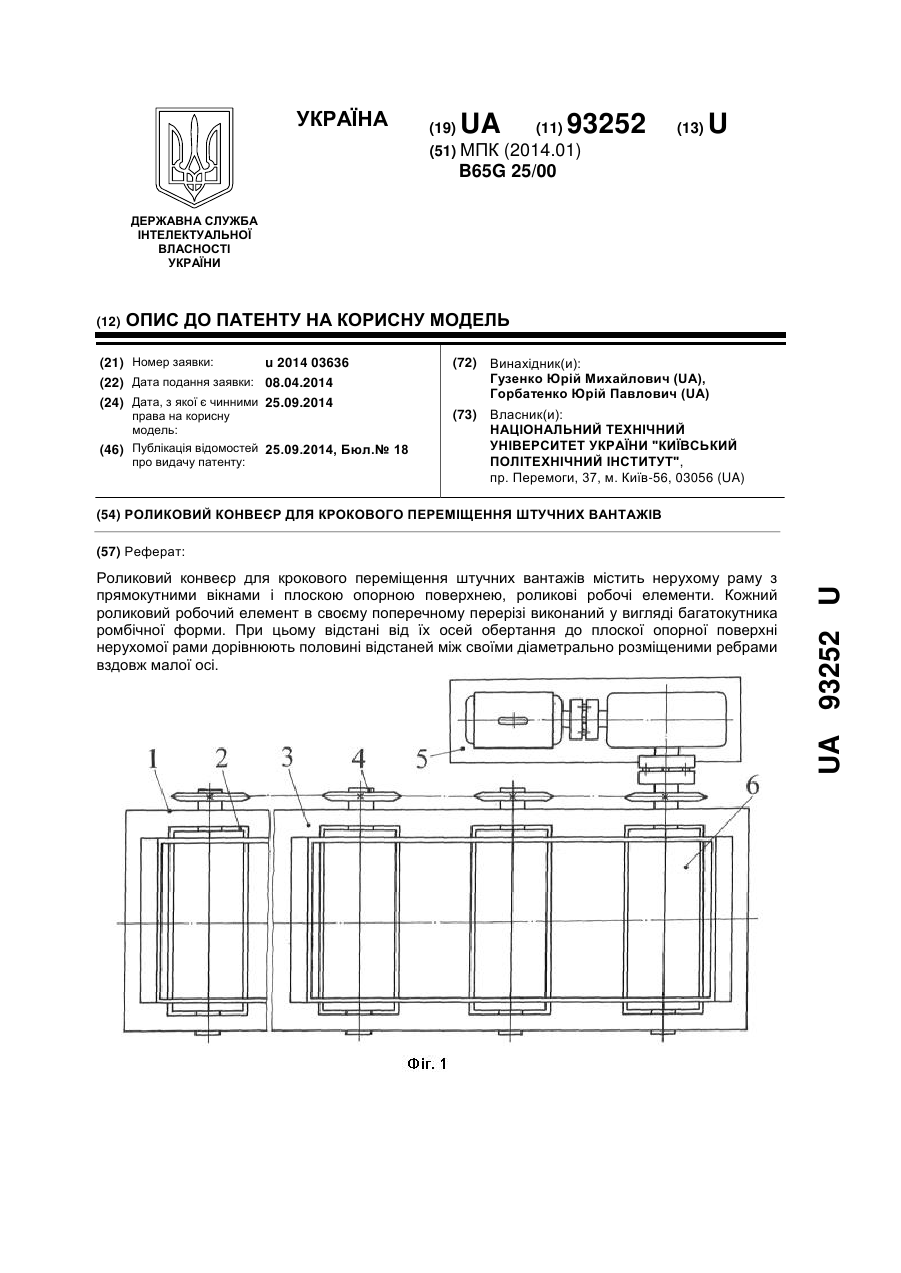
Роликовий конвеєр для крокового переміщення штучних вантажів, що містить нерухому раму з прямокутними вікнами і плоскою опорною поверхнею, а також встановлені на горизонтальних осях з можливістю свого обертального руху від привода роликові робочі елементи, при цьому поперечний переріз кожного з них має форму багатокутника і його ребра при горизонтальному положенні кожної верхньої грані розміщуються нижче опорної поверхні рами, а при...
Роликовий гвинтовий конвеєр
Номер патенту: 6296
Опубліковано: 16.05.2005
Автор: Гевко Іван Богданович
МПК: B65G 33/16
Мітки: конвеєр, роликовий, гвинтовий
Формула / Реферат:
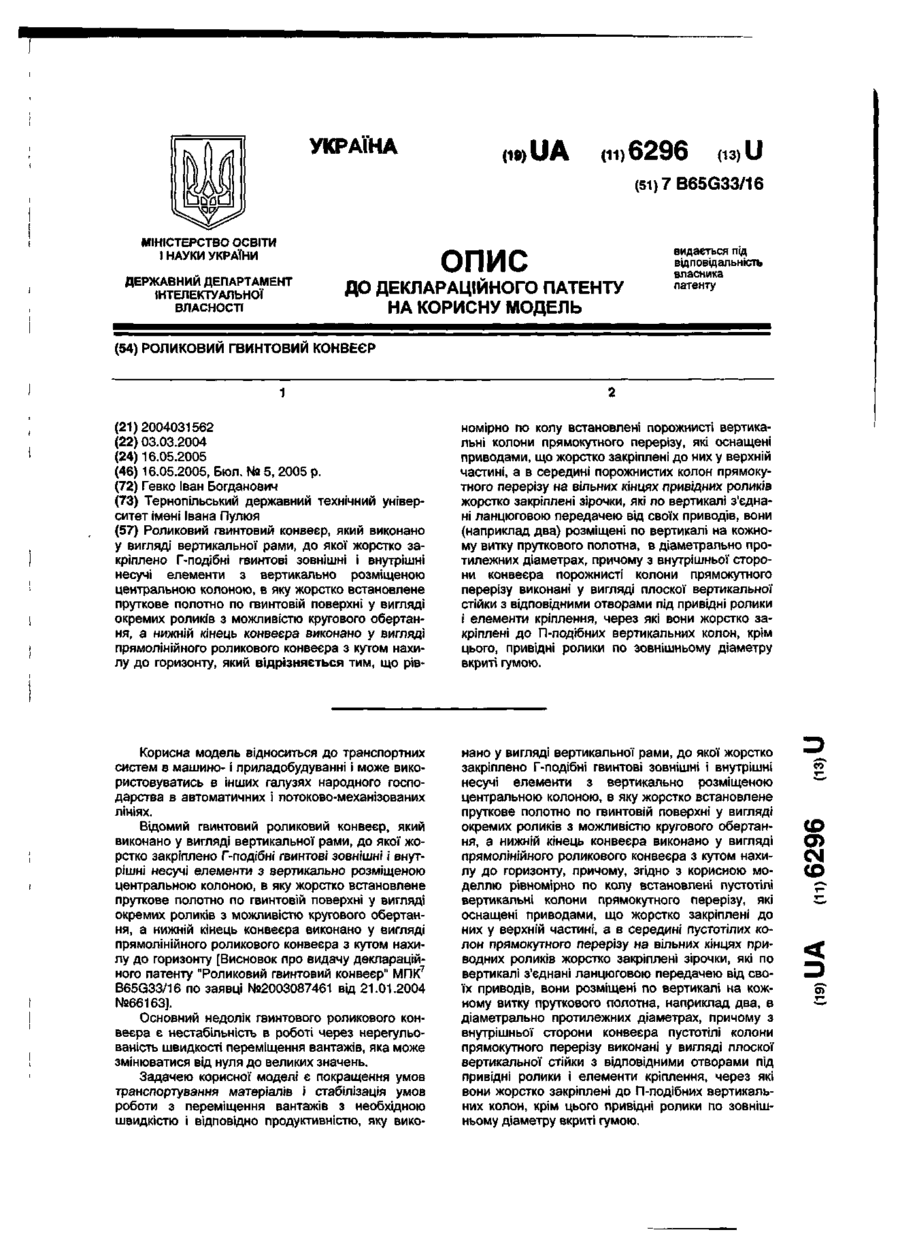
Роликовий гвинтовий конвеєр, який виконано у вигляді вертикальної рами, до якої жорстко закріплено Г-подібні гвинтові зовнішні і внутрішні несучі елементи з вертикально розміщеною центральною колоною, в яку жорстко встановлене пруткове полотно по гвинтовій поверхні у вигляді окремих роликів з можливістю кругового обертання, а нижній кінець конвеєра виконано у вигляді прямолінійного роликового конвеєра з кутом нахилу до горизонту, який...
Скребковий конвеєр для переміщення сипких вантажів
Номер патенту: 84459
Опубліковано: 25.10.2013
Автори: Рибалко Вячеслав Миколайович, Ловейкін Вячеслав Сергійович, Івасенко Денис Михайлович
МПК: B65G 19/00
Мітки: скребковий, переміщення, сипких, конвеєр, вантажів
Формула / Реферат:
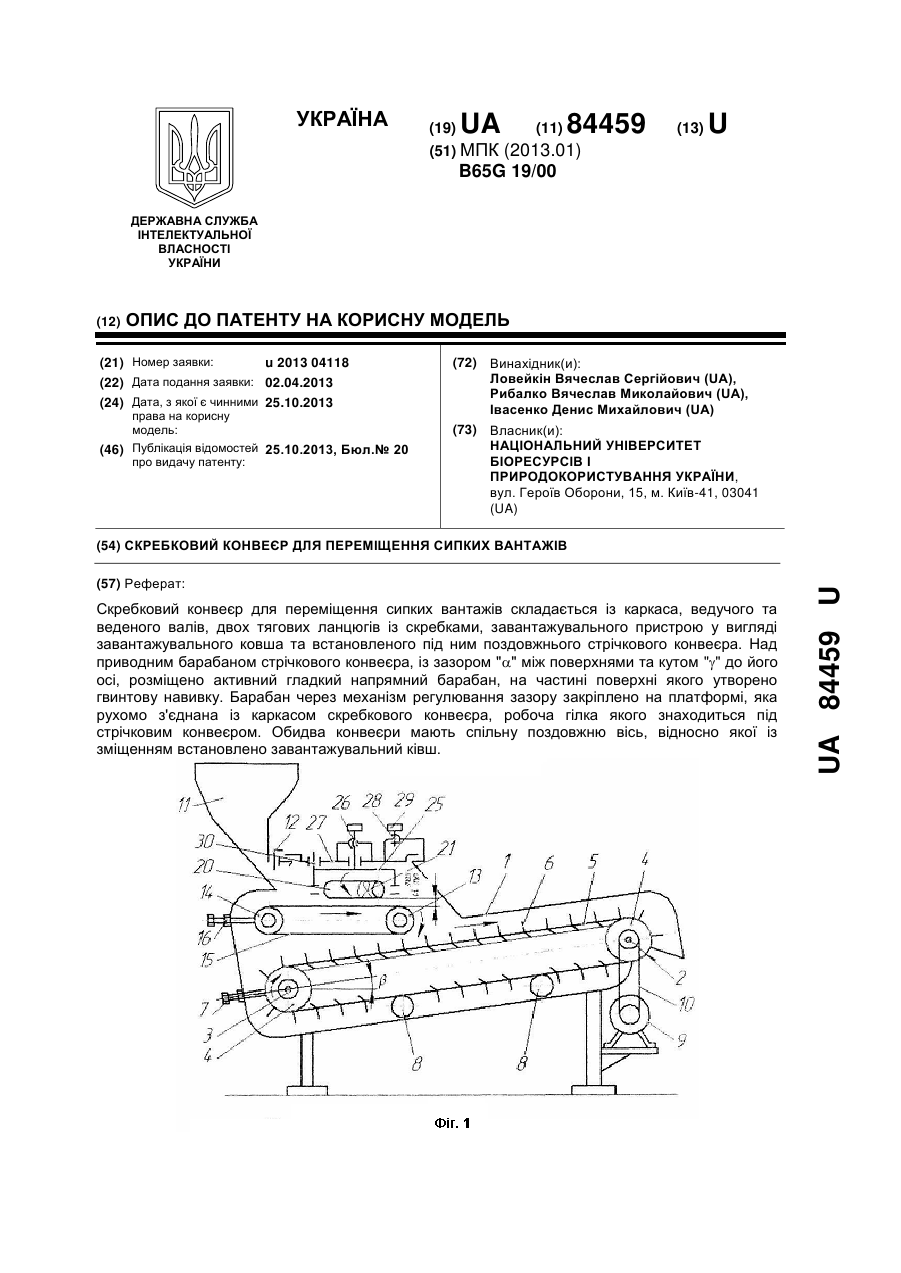
Скребковий конвеєр для переміщення сипких вантажів, який складається із каркаса, ведучого та веденого валів, двох тягових ланцюгів із скребками, завантажувального пристрою у вигляді завантажувального ковша та встановленого під ним поздовжнього стрічкового конвеєра, який відрізняється тим, що над приводним барабаном стрічкового конвеєра, із зазором "a" між поверхнями та кутом "g" до його осі, розміщено активний гладкий...
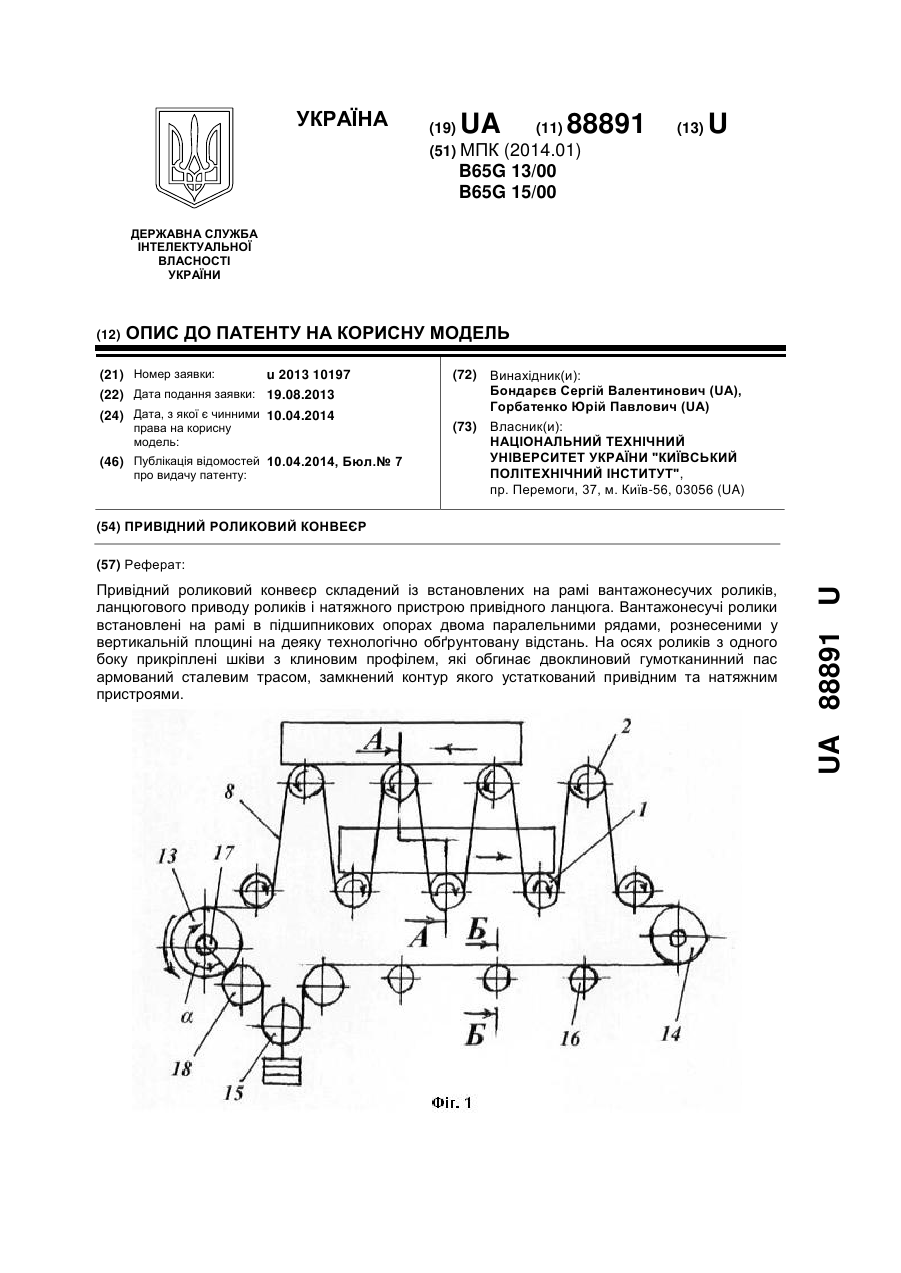
Привідний роликовий конвеєр
Номер патенту: 88891
Опубліковано: 10.04.2014
Автори: Горбатенко Юрій Павлович, Бондарєв Сергій Валентинович
МПК: B65G 15/00, B65G 13/00
Мітки: роликовий, привідний, конвеєр
Формула / Реферат:
Привідний роликовий конвеєр, що містить встановлені на рамі вантажонесучих роликів, ланцюговий привід роликів і натяжний пристрій привідного ланцюга, який відрізняється тим, що вантажонесучі ролики встановлені на рамі в підшипникових опорах двома паралельними рядами, рознесеними у вертикальній площині на деяку технологічно обґрунтовану відстань, при цьому на осях роликів з одного боку прикріплені шківи з клиновим профілем, які обгинає...
Конвеєр роликовий

Номер патенту: 68553
Опубліковано: 26.03.2012
Автор: ЗАБОРА ВОЛОДИМИР МИКИТОВИЧ
МПК: B65G 17/00
Формула / Реферат:
Конвеєр роликовий, що містить раму, опорні підшипники, ролики, на осях яких закріплені зірочки, тяговий ланцюг, сполучений з приводом, допоміжні ролики і пружини, який відрізняється тим, що конвеєрна лінія складається з окремих секцій, які мають непарне число роликів, з яких середній закріплений на окремій рамці, яка своїми ніжками входить в отвори середніх опор, в яких розміщені пружини, а на рамі і на рамці закріплені відповідно постійні...
Попередній патент: Фіксатор для тимчасового блокування наросткової зони довгих кісток кінцівок
Наступний патент: Вантажозахватний пристрій для мішків
Випадковий патент: Пристрій для подачі повітря і бідного опалювального газу в опалювальні канали коксової печі