Спосіб регулювання діючого струму навантаження індукційної установки
Номер патенту: 101155
Опубліковано: 25.08.2015
Автори: Галінська Євгенія Віталіївна, Бялобржеський Олексій Володимирович
Формула / Реферат
Спосіб регулювання діючого струму навантаження індукційної установки, який полягає в тому, що формують пряму та зворотну півхвилі в паралельному резонансному контурі з індукційним навантаженням за допомогою двох однакових мостових транзисторних інверторів напруги, які підключають паралельно по входу до некерованого випрямляча через LC-фільтри, який відрізняється тим, що по виходу інвертори підключають послідовно одним узгоджуючим трансформатором, шляхом автоматичного підстроювання частоти визначають частоту напруги, яка відповідає резонансній настройці другого мостового транзисторного інвертора напруги, формують напругу першого інвертора, вимірюють температуру індуктора, порівнюють з заданою температурою, визначають необхідну величину струму індуктора, змінюють фазовий кут між моментами включення транзисторів першого та другого інверторів, формують напругу другого інвертора, за рахунок підсумовування напруг первинних обмоток у вторинній обмотці трансформатора, здійснюють регулювання струму індуктора.
Текст
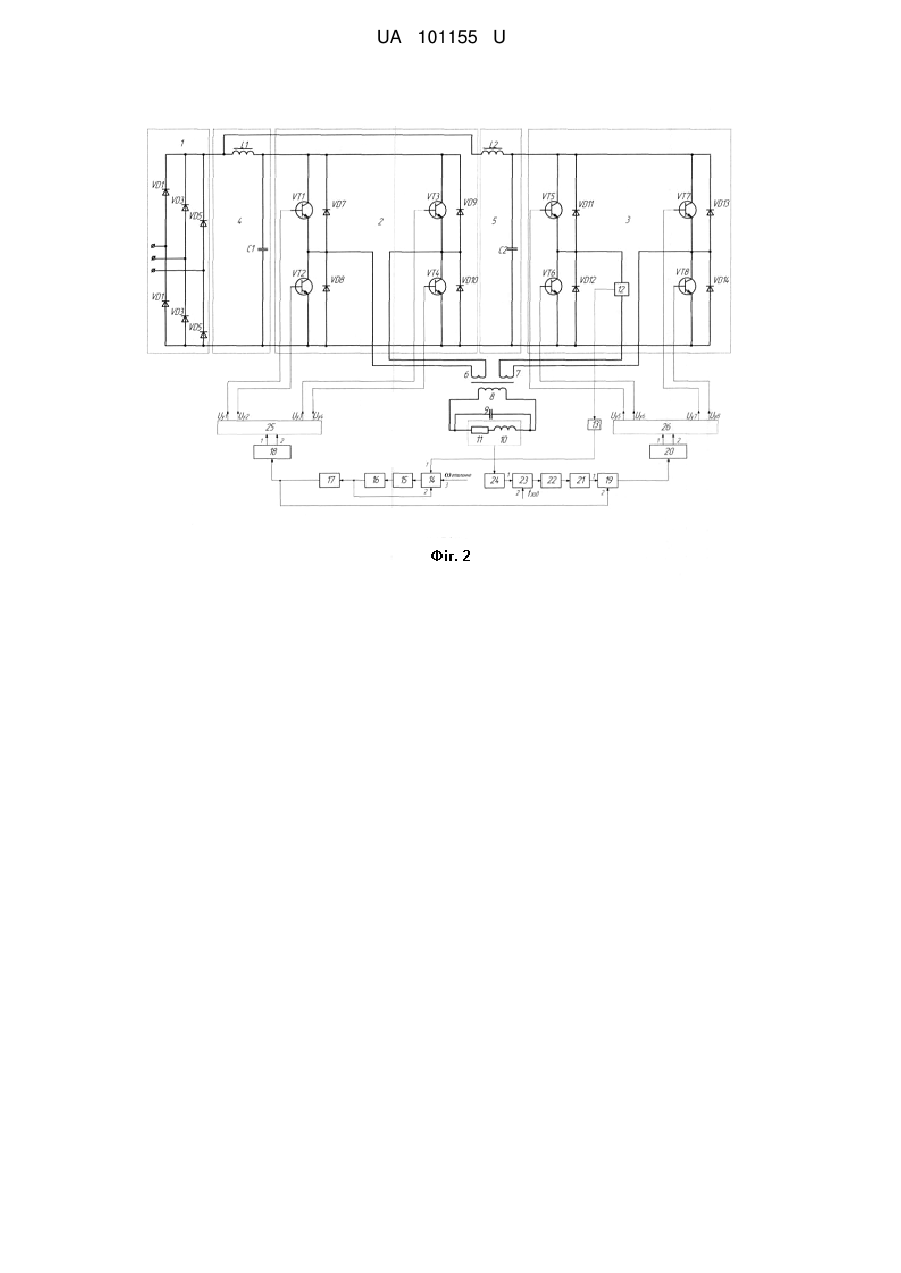
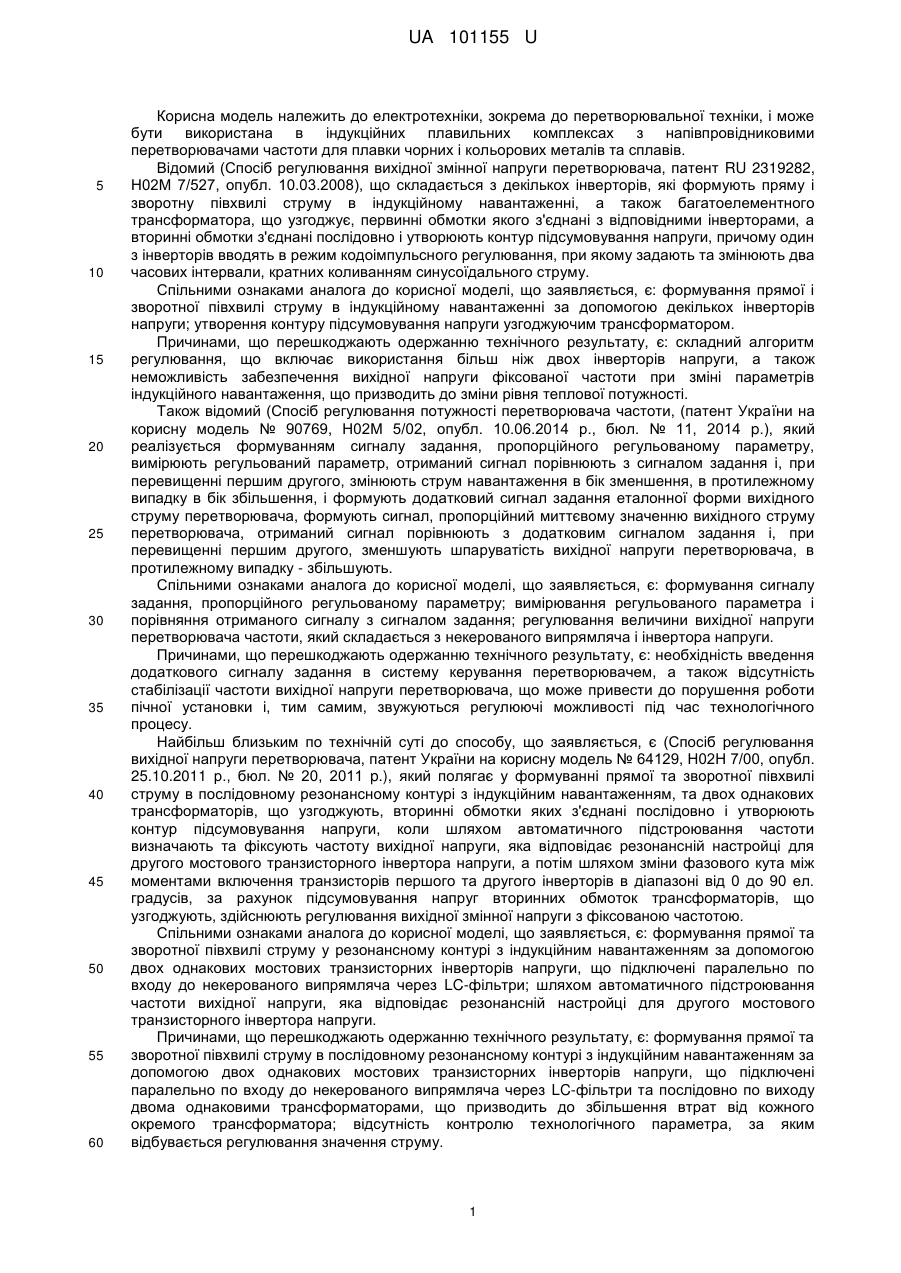
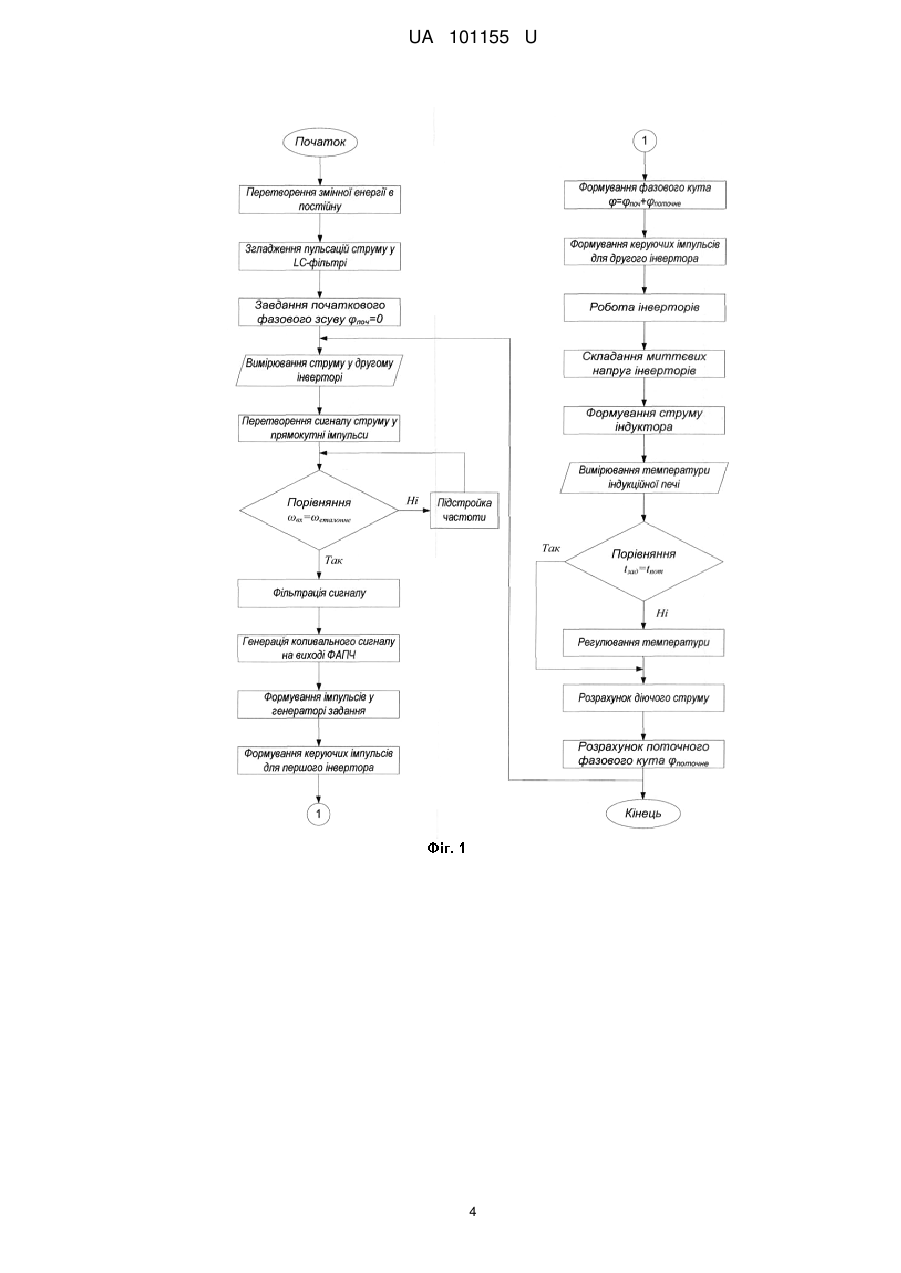
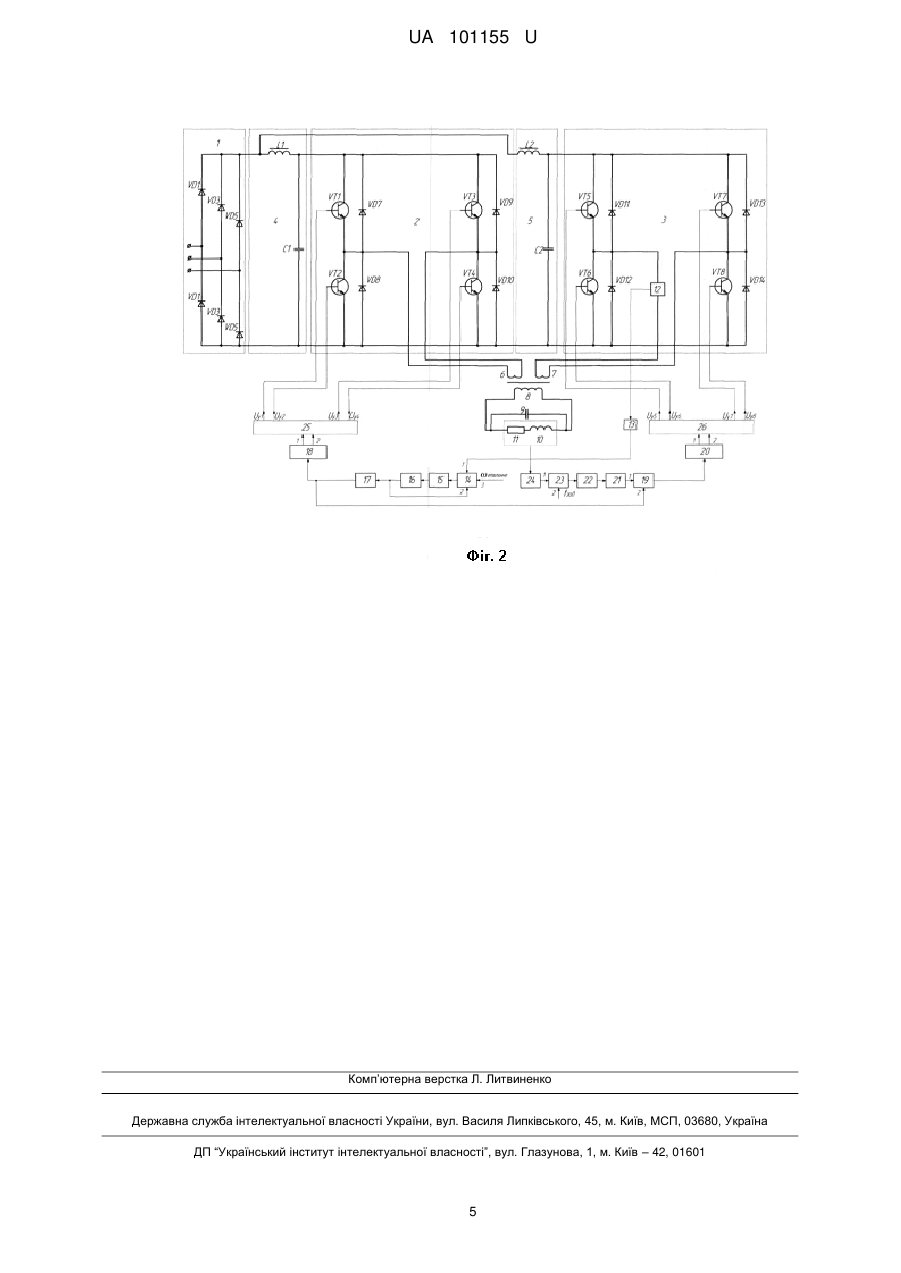
Реферат: Спосіб регулювання діючого струму навантаження індукційної установки полягає в тому, що формують пряму та зворотну півхвилі в паралельному резонансному контурі з індукційним навантаженням за допомогою двох однакових мостових транзисторних інверторів напруги, які підключають паралельно по входу до некерованого випрямляча через LC-фільтри. По виходу інвертори підключають послідовно одним узгоджуючим трансформатором. Шляхом автоматичного підстроювання частоти визначають частоту напруги, яка відповідає резонансній настройці другого мостового транзисторного інвертора напруги. Формують напругу першого інвертора. Вимірюють температуру індуктора та порівнюють з заданою температурою. Визначають необхідну величину струму індуктора. Змінюють фазовий кут між моментами включення транзисторів першого та другого інверторів. Формують напругу другого інвертора, за рахунок підсумовування напруг первинних обмоток у вторинній обмотці трансформатора та здійснюють регулювання струму індуктора. UA 101155 U (54) СПОСІБ РЕГУЛЮВАННЯ ДІЮЧОГО СТРУМУ НАВАНТАЖЕННЯ ІНДУКЦІЙНОЇ УСТАНОВКИ UA 101155 U UA 101155 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до електротехніки, зокрема до перетворювальної техніки, і може бути використана в індукційних плавильних комплексах з напівпровідниковими перетворювачами частоти для плавки чорних і кольорових металів та сплавів. Відомий (Спосіб регулювання вихідної змінної напруги перетворювача, патент RU 2319282, Н02М 7/527, опубл. 10.03.2008), що складається з декількох інверторів, які формують пряму і зворотну півхвилі струму в індукційному навантаженні, а також багатоелементного трансформатора, що узгоджує, первинні обмотки якого з'єднані з відповідними інверторами, а вторинні обмотки з'єднані послідовно і утворюють контур підсумовування напруги, причому один з інверторів вводять в режим кодоімпульсного регулювання, при якому задають та змінюють два часових інтервали, кратних коливанням синусоїдального струму. Спільними ознаками аналога до корисної моделі, що заявляється, є: формування прямої і зворотної півхвилі струму в індукційному навантаженні за допомогою декількох інверторів напруги; утворення контуру підсумовування напруги узгоджуючим трансформатором. Причинами, що перешкоджають одержанню технічного результату, є: складний алгоритм регулювання, що включає використання більш ніж двох інверторів напруги, а також неможливість забезпечення вихідної напруги фіксованої частоти при зміні параметрів індукційного навантаження, що призводить до зміни рівня теплової потужності. Також відомий (Спосіб регулювання потужності перетворювача частоти, (патент України на корисну модель № 90769, Н02М 5/02, опубл. 10.06.2014 р., бюл. № 11, 2014 p.), який реалізується формуванням сигналу задання, пропорційного регульованому параметру, вимірюють регульований параметр, отриманий сигнал порівнюють з сигналом задання і, при перевищенні першим другого, змінюють струм навантаження в бік зменшення, в протилежному випадку в бік збільшення, і формують додатковий сигнал задання еталонної форми вихідного струму перетворювача, формують сигнал, пропорційний миттєвому значенню вихідного струму перетворювача, отриманий сигнал порівнюють з додатковим сигналом задання і, при перевищенні першим другого, зменшують шпаруватість вихідної напруги перетворювача, в протилежному випадку - збільшують. Спільними ознаками аналога до корисної моделі, що заявляється, є: формування сигналу задання, пропорційного регульованому параметру; вимірювання регульованого параметра і порівняння отриманого сигналу з сигналом задання; регулювання величини вихідної напруги перетворювача частоти, який складається з некерованого випрямляча і інвертора напруги. Причинами, що перешкоджають одержанню технічного результату, є: необхідність введення додаткового сигналу задання в систему керування перетворювачем, а також відсутність стабілізації частоти вихідної напруги перетворювача, що може привести до порушення роботи пічної установки і, тим самим, звужуються регулюючі можливості під час технологічного процесу. Найбільш близьким по технічній суті до способу, що заявляється, є (Спосіб регулювання вихідної напруги перетворювача, патент України на корисну модель № 64129, Н02Н 7/00, опубл. 25.10.2011 р., бюл. № 20, 2011 p.), який полягає у формуванні прямої та зворотної півхвилі струму в послідовному резонансному контурі з індукційним навантаженням, та двох однакових трансформаторів, що узгоджують, вторинні обмотки яких з'єднані послідовно і утворюють контур підсумовування напруги, коли шляхом автоматичного підстроювання частоти визначають та фіксують частоту вихідної напруги, яка відповідає резонансній настройці для другого мостового транзисторного інвертора напруги, а потім шляхом зміни фазового кута між моментами включення транзисторів першого та другого інверторів в діапазоні від 0 до 90 ел. градусів, за рахунок підсумовування напруг вторинних обмоток трансформаторів, що узгоджують, здійснюють регулювання вихідної змінної напруги з фіксованою частотою. Спільними ознаками аналога до корисної моделі, що заявляється, є: формування прямої та зворотної півхвилі струму у резонансному контурі з індукційним навантаженням за допомогою двох однакових мостових транзисторних інверторів напруги, що підключені паралельно по входу до некерованого випрямляча через LC-фільтри; шляхом автоматичного підстроювання частоти вихідної напруги, яка відповідає резонансній настройці для другого мостового транзисторного інвертора напруги. Причинами, що перешкоджають одержанню технічного результату, є: формування прямої та зворотної півхвилі струму в послідовному резонансному контурі з індукційним навантаженням за допомогою двох однакових мостових транзисторних інверторів напруги, що підключені паралельно по входу до некерованого випрямляча через LC-фільтри та послідовно по виходу двома однаковими трансформаторами, що призводить до збільшення втрат від кожного окремого трансформатора; відсутність контролю технологічного параметра, за яким відбувається регулювання значення струму. 1 UA 101155 U 5 10 15 20 25 30 35 40 45 50 55 60 За кількістю спільних суттєвих ознак відомого способу його вибрано за прототип. В основу корисної моделі поставлена задачу регулювання діючого струму навантаження індукційної установки, шляхом введення елемента контролю технологічного параметра, пов'язаного з блоком регулювання забезпечити визначення амплітуди струму індукційної установки та регулювання технологічного параметра - температури. Поставлена задача вирішується тим, що в способі регулювання діючого струму навантаження індукційної установки, який полягає в тому, що формують пряму та зворотну півхвилі в паралельному резонансному контурі з індукційним навантаженням за допомогою двох однакових мостових транзисторних інверторів напруги, які підключають паралельно по входу до некерованого випрямляча через LC-фільтри, а по виходу інвертори підключають послідовно одним узгоджуючим трансформатором, шляхом автоматичного підстроювання частоти визначають частоту напруги, яка відповідає резонансній настройці другого мостового транзисторного інвертора напруги, формують напругу першого інвертора, вимірюють температуру індуктора, порівнюють з заданою температурою, визначають необхідну величину струму індуктора, змінюють фазовий кут між моментами включення транзисторів першого та другого інверторів, формують напругу другого інвертора, за рахунок підсумовування напруг первинних обмоток у вторинній обмотці трансформатора, здійснюють регулювання струму індуктора. Технічним результатом є розширення функціональних та експлуатаційних можливостей використання транзисторного перетворювача частоти призначеного для використання в установках індукційної плавки металів Корисна модель пояснюється кресленнями: Фіг. 1. - Алгоритм реалізації способу. Фіг.2 - Функціональна схема перетворювача з системою управління, яка реалізує запропонований спосіб, яка містить некерований випрямляч 1, який живить перший мостовий транзисторний інвертор напруги 2 та другий мостовий транзисторний інвертор напруги 3, які підключені паралельно по входу до випрямляча 1 через LC-фільтри 4 і 5 та підключені до першої первинної обмотки 6 і до другої первинної обмотки 7 триобмоткового узгоджуючого трансформатора, вища обмотка 8 якого підключена до паралельного резонансного контуру, складеного з конденсатора 9 та індукційного навантаження, представленого еквівалентними параметрами послідовно з'єднаних індуктивності 10 та опору 11. У коло другої первинної обмотки 7 узгоджуючого трансформатора підключений датчик струму 12, вихід якого подається до компаратора 13, вихід якого з'єднаний з пристроєм фазової автопідстройки частоти ФАПЧ через вхід 1 фазового детектора 14. З виходу фазового детектора 14 сигнал надходить на фільтр низьких частот 15, з виходу якого іде сигнал на вхід генератора, керованого напругою 16, який формує сигнал, що надходить до генератора задання 17 і зворотним зв'язком до входу 2 фазового детектора 14. До входу 3 фазового детектора 14 надходить еталонний сигнал ωеталонне. Генератор задання 17 своїм виходом одночасно зв'язаний з першим D-тригером 18 і з входом 2 формувача фазового кута 19, вихід якого з'єднаний з входом другого D-тригера 20, а вхід 1 якого з'єднаний з виходом вираховувача струму задання 21, на вхід якого надходить сигнал з регулятора температури 22, вхід якого підключений до пристрою порівняння 23. На вхід 1 пристрою порівняння 24 подається сигнал з виходу датчика температури 24, який підключений до контуру індукційного навантаження, а на вхід 2 керуючий сигнал задання температури плавки tзад. Виходи 1 і 2 першого D-тригера 18 підключені до першого блока драйверів 25, які формують імпульси UУ1, UУ2, UУ3 та UУ4 для управління, відповідно, першим VT1, другим VT2, третім VT3 та четвертим VT4 транзисторами першого інвертора напруги 2. Виходи другого Dтригера 20 підключені до другого блока драйверів 26, які формують імпульси UУ5, UУ6, UУ7 та UУ8 для управління відповідно п'ятим VT5, шостим VT6, сьомим VT7 та восьмим VT8 транзисторами другого інвертора напруги 3. Спосіб реалізується наступним чином (фіг. 1). В заявленому способі регулювання діючого струму навантаження індукційної установки спочатку задається початковий фазовий зсув φпоч=0, вимірюється струм датчиком струму 12 у інверторі напруги 3. Отриманий сигнал у компараторі 13 перетворюється у прямокутні імпульси, які надходять до фазового детектора 14, який здійснює порівняння частоти вхідного сигналу ω вх з частотою еталонного сигналу ωеталонне. Якщо частота вхідного сигналу ωвх не дорівнює частоті еталонного сигналу ("еталонне, то здійснюється автоматична підстройка частоти так, щоб задовольнялась необхідна умова ωвх = ωеталонне. Через фільтр низьких частот 15 на виході ФАПЧ генератором, керованим напругою 16, генерується коливальний сигнал, що надходить до генератора задання 17, який формує імпульси, які надходять до першого D-тригера 18, який разом з першим блоком драйверів формування сигналу 25 формують керуючі імпульси для 2 UA 101155 U 5 10 15 20 25 першого інвертора напруги 2. Далі у формувачі фазового кута 19 формуються фазовий кут φ= φпоч + φпоточне, який на даному етапі дорівнює нулю. Сформований сигнал надходить до другого D-тригера 20, який разом з другим блоком драйверів формування сигналу 26 формують керуючі імпульси для другого інвертора напруги 3. Таким чином інвертори напруги одночасно працюють з однією частотою і фазовим кутом φ=0. У трансформаторі, у вищий обмотці 8, шляхом складання миттєвих напруг у першій 6 і другій 7 первинних обмотках, формується вихідна напруга трансформатора, що зумовлює формування величини струму індуктора, який проходить через індуктивність 10 та опір 11 навантаження. Вимірюється температура індукційної плавильної печі датчиком температури 24 і порівнюються отримані результати з заданим значенням температури плавки у даний момент tзад у пристрої порівняння 23. Регулятор температури 22 у випадку, коли виміряний поточний параметр технологічного процесу tпот не співпадає з заданою температурою tзад, змінює температуру до величини, яка відповідає tзад. Для отриманої температури технологічного процесу у блоці вираховувавання струму задання 21 проводиться розрахунок струму, який необхідний для отримання необхідної температури чи підтримки наявної у випадку, коли виконалась умова tзад = tпот. До першого входу формувача фазового кута 19 надходить сигнал, який відповідає вирахуваному струму на індукційному навантаженні, до другого входу надходить сигнал з генератора задання 17, який відповідає необхідній частоті резонансу. У формувачі фазового кута 19 відбувається розрахунок поточного фазового кута φпоточне і отриманий сигнал подається до другого D-тригера 20, який разом з другим блоком драйверів формування сигналу 26 формують керуючі імпульси для другого інвертора напруги 3 і тим самим регулюють струм навантаження в індукторі в залежності від зміни температури під час технологічного процесу. Таким чином відбувається регулювання діючого струму навантаження індукційної установки, шляхом введення елемента контролю технологічного параметра, пов'язаного з блоком регулювання забезпечується визначення амплітуди струму індукційної установки та регулювання технологічного параметра - температури. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 Спосіб регулювання діючого струму навантаження індукційної установки, який полягає в тому, що формують пряму та зворотну півхвилі в паралельному резонансному контурі з індукційним навантаженням за допомогою двох однакових мостових транзисторних інверторів напруги, які підключають паралельно по входу до некерованого випрямляча через LC-фільтри, який відрізняється тим, що по виходу інвертори підключають послідовно одним узгоджуючим трансформатором, шляхом автоматичного підстроювання частоти визначають частоту напруги, яка відповідає резонансній настройці другого мостового транзисторного інвертора напруги, формують напругу першого інвертора, вимірюють температуру індуктора, порівнюють з заданою температурою, визначають необхідну величину струму індуктора, змінюють фазовий кут між моментами включення транзисторів першого та другого інверторів, формують напругу другого інвертора, за рахунок підсумовування напруг первинних обмоток у вторинній обмотці трансформатора, здійснюють регулювання струму індуктора. 3 UA 101155 U 4 UA 101155 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: регулювання, діючого, спосіб, індукційної, струму, установки, навантаження
Код посилання
<a href="https://ua.patents.su/7-101155-sposib-regulyuvannya-diyuchogo-strumu-navantazhennya-indukcijjno-ustanovki.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання діючого струму навантаження індукційної установки</a>
Спосіб регулювання струму навантаження трифазного перетворювача для частотно-керованих електроприводів змінного струму

Номер патенту: 79056
Опубліковано: 10.04.2013
Автор: Кулагін Дмитро Олександрович
МПК: H02M 7/12
Мітки: змінного, навантаження, частотно-керованих, трифазного, перетворювача, спосіб, регулювання, струму, електроприводів
Формула / Реферат:
Спосіб регулювання струму навантаження трифазного перетворювача для частотно-керованих електроприводів змінного струму, який полягає у тому, що вимірюють струм навантаження, визначають сигнал помилки, як різницю заданого та виміряного значень струму, інтегрують сигнал помилки, формують імпульси керування вентилями перетворювача з кутом керування, пропорційним сумі сигналів результату інтегрування і значення помилки, який відрізняється тим,...
Спосіб регулювання потужності індукційної печі
Номер патенту: 25596
Опубліковано: 10.08.2007
Автор: Ревенко Лілія Юріївна
МПК: H05B 6/06
Мітки: печі, потужності, спосіб, регулювання, індукційної
Формула / Реферат:
Спосіб регулювання потужності індукційної печі, що включає використання перемикаючого пристрою пічного трансформатора, який відрізняється тим, що перемикаючий пристрій пічного трансформатора фіксують в одному положенні, після чого змінюють напругу на вході у коливальний контур індукційної печі за допомогою регулятора потужності, що складений принаймні з регулятора напруги і реактора.
Спосіб регулювання величини напруги змінного струму
Номер патенту: 28297
Опубліковано: 10.12.2007
Автори: Калугін Віталій Володимирович, Костенко Костянтин Федорович, Мицкевич Олександр Сергійович, Богачев Олександр Миколайович
МПК: H02M 5/02
Мітки: регулювання, величини, змінного, струму, напруги, спосіб
Формула / Реферат:
Спосіб регулювання величини напруги змінного струму, за яким здійснюють перетворення напруги у послідовність біполярних імпульсів значно більш високої частоти відносно частоти вхідної напруги змінного струму, тривалість яких визначає величину напруги, що регулюється, а зазначене перетворення здійснюють шляхом протифазного замикання і розмикання двох ключів, який відрізняється тим, що напругу змінного струму подають на вхід 2 паралельного реле...
Система установки комплексу індукційної тигельної печі
Номер патенту: 10692
Опубліковано: 15.11.2005
Автори: Кирильченко Петро Миколайович, Зайка Володимир Якович, Токарев Веніамін Петрович, Власов Валерій Вікторович, Кохан Анатолій Омел'янович, Живолуга Сергій Вікторович, Ірха Віктор Миколайович
МПК: F27B 14/00
Мітки: індукційної, тигельної, установки, система, печі, комплексу
Формула / Реферат:
1. Система установки комплексу індукційної тигельної печі, що містить тигельну піч з мідним індуктором, водоохолоджувальний струмоведучий кабель, шафу управління, перетворювач частоти і систему водопостачання, яка відрізняється тим, що тигельна піч з індуктором, водоохолоджувальний струмоведучий кабель, шафа управління і перетворювач частоти розташовані по одній осі, причому відстань між піччю і шафою управління виконана рівною від 150 до 200...
Пристрій для регулювання швидкості електродвигуна змінного струму

Номер патенту: 55755
Опубліковано: 27.12.2010
Автори: Андрієнко Петро Дмитрович, Кулагін Дмитро Олександрович, Качур Олександр Сергійович
МПК: H02P 5/00
Мітки: швидкості, змінного, пристрій, струму, електродвигуна, регулювання
Формула / Реферат:
Пристрій для регулювання швидкості електродвигуна змінного струму, що містить автономний інвертор напруги, вихід якого підключено до статорних обмоток електродвигуна, а на вході якого встановлено фільтр, який підключено до виходу випрямляча, вхід якого підключено до живильної мережі, інтегруючу ланку, вхід якої підключено до вузла задання, а вихід якої підключено до регулятора струму, вхід якого підключено до датчика струму, який...
Попередній патент: Спосіб сепарації суміші сипучих матеріалів повітряними потоками
Наступний патент: Спосіб оцінки динаміки післяопераційного ранового процесу у хворих на синдром діабетичної стопи
Випадковий патент: Діабетичний мармелад "олексійко"