Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів в системі автоматичного регулювання

Формула / Реферат
Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів у системі автоматичного регулювання, який полягає в тому, що значення сигналу регульованого параметра зовнішнього контуру віднімають від його заданого значення, одержану різницю подають на вхід регулятора зовнішнього контуру, із вихідного сигналу обмежувача сигналу задання внутрішнього контуру віднімають сигнал регульованого параметра внутрішнього контуру, одержану різницю подають на вхід регулятора внутрішнього контуру, вихідний сигнал регулятора внутрішнього контуру подають на керуючий вхід виконавчого пристрою для зміни регульованого параметра внутрішнього контуру, під дією регульованого параметра внутрішнього контуру виконавчий пристрій змінює регульований параметр зовнішнього контуру, який відрізняється тим, що вихідній сигнал регулятора зовнішнього контуру підсумовують з сигналом регульованого параметра внутрішнього контуру, одержану суму подають на вхід обмежувача сигналу задання внутрішнього контуру.
Текст
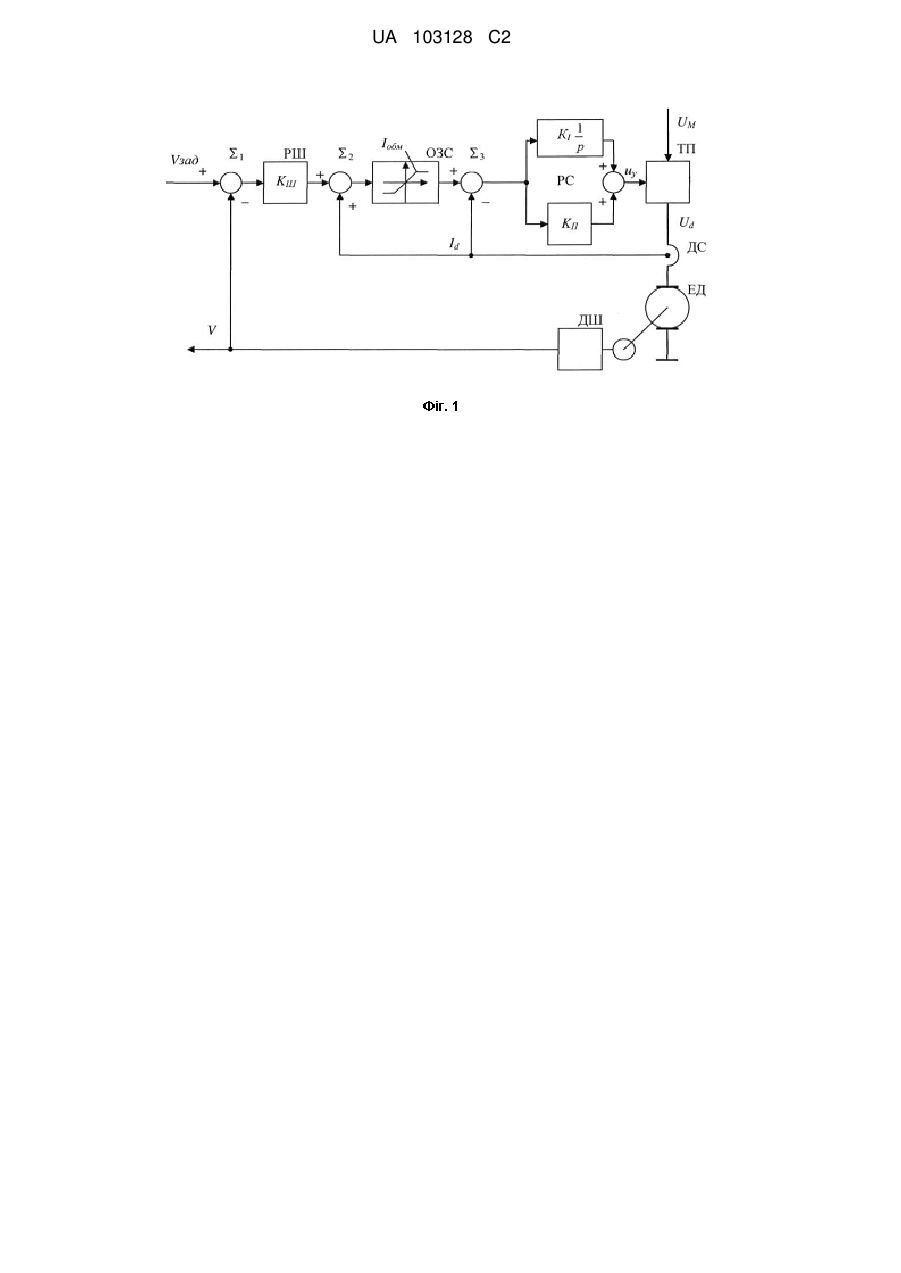
Реферат: Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів в системі автоматичного регулювання належить до електроавтоматики і може бути використаний в електроавтоматиці, зокрема в електроприводі. Регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів у системі автоматичного регулювання, який полягає в тому, що сигнал регульованого параметра зовнішнього контуру віднімають із його заданого сигналу, одержану різницю подають на вхід регулятора зовнішнього контуру. Із вихідного сигналу обмежувача сигналу задання внутрішнього контуру віднімають сигнал регульованого параметра внутрішнього контуру, одержану різницю подають на вхід регулятора внутрішнього контуру, вихідний сигнал регулятора внутрішнього контуру подають на керуючий вхід виконавчого пристрою для зміни регульованого параметра внутрішнього контуру, під дією регульованого параметра внутрішнього контуру виконавчий пристрій змінює регульований параметр зовнішнього контуру. Новим є те, що вихідній сигнал регулятора зовнішнього контуру підсумовують з регульованим параметром внутрішнього контуру, одержану суму подають на вхід обмежувача сигналу задання внутрішнього контуру. За допомогою запропонованого способу підвищується статична точність регулювання параметра зовнішнього контуру при підвищенні якості перехідних процесів; спрощується система регулювання. UA 103128 C2 (12) UA 103128 C2 UA 103128 C2 5 10 15 20 25 30 35 40 45 50 55 60 Спосіб належить до електроавтоматики при підпорядкованому регулюванні параметрів, зокрема до регулювання параметрів електроприводу. Відомий спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів в системі автоматичного регулювання ["Управление вентильными электроприводами постоянного тока". / Є.Д. Лебедев, В.Є. Неймарк, М.Я. Пістрак, О.В. Слежановський // - М.: "Энергия", 1970.-200 с, с. 28, 29, 57-59], в якому сигнал регульованого параметра зовнішнього контуру віднімають із його заданого значення, одержану різницю подають на регулятор зовнішнього контуру, із вихідного сигналу обмежувача сигналу задання внутрішнього контуру віднімають сигнал регульованого параметра внутрішнього контуру, одержану різницю подають на вхід регулятора внутрішнього контуру, вихідний сигнал регулятора внутрішнього контуру подають на керуючий вхід виконавчого пристрою для зміни регульованого параметра внутрішнього контуру, під дією сигналу регульованого параметра внутрішнього контуру виконавчий пристрій змінює регульований параметр зовнішнього контуру. При цьому вихідний сигнал регулятора зовнішнього контуру подають на обмежувач сигналу задання внутрішнього контуру. Недоліком цього способу є те, що для забезпечення високої статичної точності регулювання параметра зовнішнього контуру у цьому способі необхідно інтегрувати різницю між заданою та фактичною величинами параметра зовнішнього контуру. Враховуючи те, що для ефективного струмообмеження також інтегрується різниця між вихідним сигналом обмежувача сигналу задання внутрішнього контуру і регульованим параметром внутрішнього контуру, має місце дворазове інтегрування в системі регулювання, внаслідок чого система схильна до автоколивань і якість перехідних процесів низька. При спробі зменшити час регулювання збільшується перерегулювання, при спробі зменшити перерегулювання час регулювання збільшується. Крім того, при інтегруванні різниці між заданою та фактичною величинами регульованого параметра зовнішнього контуру система регулювання ускладниться, оскільки необхідно уводити параметр „постійна часу інтегрування" та повинна бути методика вибору цього параметра. Якщо не інтегрувати різницю між заданою та фактичною величинами регульованого параметра зовнішнього контуру, то виникає статична похибка регулювання. Таким чином, відомий спосіб не забезпечує одночасно високу статичну точність регулювання параметра зовнішнього контуру і високу якість перехідних процесів, а для забезпечення високої статичної точності регулювання система регулювання складна. В основу винаходу поставлена задача удосконалення способу уведенням нової операції і заміні відомої операції на нову, що забезпечує високу статичну точність регулювання параметра зовнішнього контуру при підвищенні якості перехідних процесів і спрощення системи регулювання. Задача, що ставиться, вирішується таким чином, що в способі регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів у системі автоматичного регулювання, який полягає в тому, що сигнал регульованого параметра зовнішнього контуру віднімають із його заданого значення, одержану різницю подають на вхід регулятора зовнішнього контуру, із вихідного сигналу обмежувача сигналу задання внутрішнього контуру віднімають сигнал регульованого параметра внутрішнього контуру, одержану різницю подають на вхід регулятора внутрішнього контуру, вихідний сигнал регулятора внутрішнього контуру подають на керуючий вхід виконавчого пристрою для зміни регульованого параметра внутрішнього контуру, під дією регульованого параметра внутрішнього контуру виконавчий пристрій змінює регульований параметр зовнішнього контуру, вихідний сигнал регулятора зовнішнього контуру підсумовують з сигналом регульованого параметра внутрішнього контуру, одержану суму подають на обмежувач сигналу задання внутрішнього контуру. Новим, відповідно до винаходу, є те, що уводиться додаткова операція, при якій вихідний сигнал регулятора зовнішнього контуру підсумовують з сигналом регульованого параметра внутрішнього контуру, а операція, при якій одержану суму подають на вхід обмежувача сигналу задання внутрішнього контуру, уводиться замість операції відомого способу, при якій вихідний сигнал регулятора зовнішнього контуру подають на обмежувач сигналу задання внутрішнього контуру. Причинно-наслідковий зв'язок між сукупністю ознак винаходу, що заявляється, і технічним результатом, що досягається, полягає в наступному: підсумовування вихідного сигналу регулятора зовнішнього контуру і сигналу регульованого параметра внутрішнього контуру та подачі одержаної суми на обмежувач сигналу задання внутрішнього контуру дозволяє забезпечити високу статичну точність регулювання параметра зовнішнього контуру при підвищенні якості перехідних процесів і спростити систему регулювання. 1 UA 103128 C2 5 10 15 20 25 30 35 40 45 50 55 60 Це пояснюється наступним. При підсумовуванні вихідного сигналу регулятора зовнішнього контуру і сигналу регульованого параметра внутрішнього контуру регулювання та подачі одержаної суми на обмежувач сигналу задання внутрішнього контуру відпадає необхідність інтегрувати різницю між заданою і фактичною величинами регульованого параметра зовнішнього контуру. При цьому висока статична точність регулювання параметра зовнішнього контуру досягається за рахунок інтегрування тільки вхідного сигналу регулятора внутрішнього контуру. При малих відхиленнях сигналу, менших рівня обмеження обмежувача сигналу задання внутрішнього контуру, величина сигналу обумовлюється тільки різницею між заданою та фактичною величинами сигналів регульованого параметра зовнішнього контуру і не залежить від сигналу регульованого параметра внутрішнього контуру, тому що сигнал регульований параметр внутрішнього контуру спочатку підсумовується з вихідним сигналом регулятора зовнішнього контуру до обмежувача сигналу задання внутрішнього контуру, який при малих відхиленнях сигналу не змінює сигнал, а потім віднімається із отриманої суми. Таким чином, зворотний зв'язок по регульованому параметру внутрішнього контуру вимикається і система трансформується в одноконтурну астатичну систему регулювання параметра зовнішнього контуру, що одночасно з забезпеченням високої статичної точності регулювання підвищує якість перехідних процесів. За рахунок того, що відпадає необхідність інтегрування різниці між заданою та фактичною величинами регульованого параметра зовнішнього контуру, спрощується система регулювання, немає необхідності уводити додатковий установчий параметр „постійна часу інтегрування" і не потребується методика установки її значення. При великих відхиленнях регульованого параметра зовнішнього контуру від заданої величини вихідний сигнал регулятора регульованого параметра зовнішнього контуру обмежується обмежувачем сигналу задання внутрішнього контуру, і сигнал задання для регульованого параметра внутрішнього контуру постійний, максимально можливий, визначений рівнем обмеження обмежувача сигналу задання внутрішнього контуру. При цьому відбувається наближення регульованого параметра зовнішнього контуру до заданої величини з максимально можливою швидкістю. Через підсумовування вихідного сигналу регулятора зовнішнього контуру з регульованим параметром внутрішнього контуру при наростанні вихідного сигналу регулятора зовнішнього контуру вхідний сигнал обмежувача сигналу задання внутрішнього контуру досягає рівня обмеження раніше, ніж при відомому способі, а при зниженні вихідного сигналу регулятора зовнішнього контуру вхідний сигнал обмежувача сигналу задання внутрішнього контуру стає нижчим рівня обмеження пізніше, ніж при відомому способі. Тому у запропонованому способі час наближення регульованого параметра зовнішнього контуру до заданої величини з максимально можливою швидкістю більший, а значить менше час регулювання. За рахунок того, що вихід із зони обмеження обмежувача сигналу задання внутрішнього контуру відбувається при меншій величині вихідного сигналу регулятора параметра зовнішнього контуру, при перехідному процесі з перерегулюванням зменшується величина перерегулювання. Це зменшення порівнянне з відношенням величини вихідного сигналу регулятора параметра зовнішнього контуру і рівня обмеження обмежувача сигналу задання внутрішнього контуру в момент, коли сума вихідного сигналу регулятора параметра зовнішнього контуру і сигналу регульованого параметра внутрішнього контуру дорівнює рівню обмеження. Таким чином, у запропонованому способі забезпечується висока статична точність регулювання параметра зовнішнього контуру при підвищенні якості перехідних процесів як при малих, так і при великих відхиленнях сигналів, і спрощується система регулювання. Робота пристрою регулювання, що працює за даним способом, на прикладі діючого електроприводу постійного струму, представлено фіг. 1 і фіг. 2. На фіг. 1 - структурна схема електроприводу, на фіг. 2 - осцилограма розгону електродвигуна. На фіг. 1 позначено: РШ - регулятор швидкості; ОЗС - обмежувач задання струму; PC - регулятор струму; ТП - тиристорний перетворювач; ЕД - електродвигун; ДС - датчик струму; ДШ - датчик швидкості; Σ1 - алгебраїчний суматор сигналу датчика швидкості і заданого значення швидкості; Σ2 - суматор вихідного сигналу регулятора швидкості і сигналу датчика струму; Σ3 - алгебраїчний суматор сигналу датчика струму і заданого значення струму; 2 UA 103128 C2 5 10 15 20 25 30 35 40 45 50 55 60 V - швидкість обертання електродвигуна; Vзад - задане значення швидкості; UМ - напруга мережі живлення; uу - сигнал управління перетворювачем; Ud - напруга електродвигуна; Id - струм електродвигуна; Іобм - значення струму, який визначає рівень обмеження завдання струму електродвигуна; КШ - коефіцієнт підсилення регулятора швидкості; КI - коефіцієнт підсилення інтегральної частини регулятора струму; КП - коефіцієнт підсилення пропорційної частини регулятора струму. Регульованим параметром зовнішнього контуру є швидкість обертання електродвигуна V (далі просто швидкість). Регульованим параметром внутрішнього контуру є струм електродвигуна Id. Виконавчий пристрій являє собою тиристорний перетворювач ТП і електродвигун ЕД. До підсумовуючого входу алгебраїчного суматора Σ1 подається сигнал задання швидкості Vзад, віднімаючий вхід алгебраїчного суматора Σ1 з'єднаний з виходом датчика швидкості ДШ, вихід алгебраїчного суматора Σ1 з'єднаний із входом регулятора швидкості РШ. Вихід обмежувача задання струму ОЗС з'єднаний з підсумовуючим входом алгебраїчного суматора Σ3, віднімаючий вхід алгебраїчного суматора Σ3 з'єднаний з виходом датчика струму ДС, вихід алгебраїчного суматора Σ3 з'єднаний із входом регулятора струму PC. Вихід регулятора струму з'єднаний з керуючим входом тиристорного перетворювача ТП напруги мережі живлення UМ в напругу електродвигуна Ud, яка визначає струм електродвигуна Id, ідентифікований датчиком струму ДС. Під дією струму Id змінюється швидкість електродвигуна V, яка ідентифікується датчиком швидкості ДШ. Відмінністю пристрою від пристрою, який реалізує відомий спосіб регулювання, є наявність суматора вихідного сигналу регулятора струму і сигналу датчика струму Σ2, один із входів якого з'єднаний з виходом регулятора швидкості РШ, другий - з виходом датчика струму ДС, а вихід з'єднаний із входом обмежувача завдання струму ОЗС. Якщо регулятор швидкості РШ пристрою, який реалізує відомий спосіб, містить інтегральну частину для зведення до нуля статичної похибки регулювання, то іншою відміною пропонованого пристрою є відсутність інтегральної частини в регуляторі швидкості РШ і при цьому статична похибка регулювання зводиться до нуля. Якщо регулятор швидкості РШ пристрою, що реалізує відомий спосіб,не містить інтегральної частини, то виникає статична похибка регулювання, на відміну від пропонованого пристрою, в якому статична похибка регулювання зводиться до нуля. Сигнал керування uу на керуючому вході тиристорного перетворювача ТП змінює напругу Ud і після закінчення перехідного процесу установлює його такої величини, щоб швидкість V відповідала заданому значенню швидкості Vзад, а струм Id відповідав механічному навантаженню електродвигуна. При невідповідності швидкості V заданому значенню Vзад зміна швидкості відбувається під дією відхилення струму електродвигуна Id від сталого значення. При невеликих відхиленнях швидкості V від заданого значення Vзад, незважаючи на те, що регулятор швидкості РШ пропорційний, регулювання швидкості - астатичне, так як зворотний зв'язок по струму відключається шляхом взаємного знищення додатного через суматор Σ 2 і від'ємною через суматор Σ3 зворотних зв'язків на вході і на виході обмежувача задання струму ОЗС, а наявна інтегральна частина в регуляторі струму PC забезпечує рівність сталого значення швидкості V заданому значенню Vзад. При великих відхиленнях швидкості V від заданого значення Vзад, при яких вихідний сигнал регулятора швидкості РШ перевищує рівень обмеження задання струму Іобм, регулювання струму здійснюється регулятором струму PC з від'ємним через суматор Σ 3 зворотним зв'язком по струму при подачі на його вхід максимально можливого задання, відповідного рівню обмеження струму Іобм. При цьому додатний зворотний зв'язок по струму, підключений через суматор Σ2 до обмежувача задання струму, збільшує його вхідний сигнал і сприяє більш тривалому регулюванню струму з максимально можливим сигналом задання струму, відповідного рівню обмеження Іобм, отже, більш інтенсивному наближенню швидкості до заданого значення, що зменшує час регулювання. Таким чином, при простому пропорційному регуляторі швидкості РШ, за рахунок додатного зворотного зв'язку по струму на вході обмежувача задання струму ОЗС, забезпечується астатичне регулювання швидкості та зменшення часу регулювання. При цьому перехідний процес зміни швидкості наближається до оптимального з точки зору часу регулювання. Осцилограма розгону електродвигуна у діючому електроприводі виробництва Запорізького електроапаратного заводу на струм 100 А при стрибку сигналу задання наведена на фіг. 2 (нуль 3 UA 103128 C2 5 10 15 20 25 30 сигналу завдання зверху). Обмеження задання струму встановлено на рівні 125 А, швидкість V пропорційна позначеній на осцилограмі напрузі U і виражається у вольтах. Практично весь час розгону електродвигун ЕД розганяється під дією максимально можливого струму, відповідного рівню обмеження струму Іобм. За рахунок цього час зміни швидкості до заданого значення мінімальний. Після першого досягнення швидкістю V заданого значення астатичний регулятор струму PC доводить швидкість до заданого значення з невеликими відхиленнями швидкості від заданої величини Vзад. Перехідний процес регулювання швидкості наближається до оптимального за швидкодією. Таким чином, запропонований спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів у системі автоматичного регулювання, завдяки уведення нових операцій - підсумовування вихідного сигналу регулятора зовнішнього контуру і регульованого параметра внутрішнього контуру та подача одержаної суми на обмежувач сигналу задання внутрішнього контуру дозволяє забезпечити високу статичну точність регулювання параметра зовнішнього контуру при підвищенні якості перехідних процесів і спростити систему регулювання. У конкретних пристроях це дає значний економічний ефект за рахунок підвищення якості регулювання і спрощення настроювання системи регулювання. У різних промислових виробах спосіб, яким регульований параметр внутрішнього контуру змінює регульований параметр зовнішнього контуру у виконавчому пристрої різний. На сьогоднішній день запропонована схема застосовується у трьох промислових виробах: 1. Вище розглянутий електропривод постійного струму, що випускається ВАТ "Запорізький електроапаратний завод", у якому регульований параметр зовнішнього контуру - швидкість електродвигуна, а регульований параметр внутрішнього контуру - струм електродвигуна. 2. Джерело живлення обмотки збудження синхронного електродвигуна (випускає ВАТ "Запорізький електроапаратний завод"), де регульований параметр зовнішнього контуру реактивна потужність електродвигуна, регульований параметр внутрішнього контуру - струм обмотки збудження. 3. У джерелах живлення постійним струмом для вирощування напівпровідникових кристалів, (випускається ВАТ НДІ "Перетворювач"), у якому регульований параметр зовнішнього контуру температура, регульований параметр внутрішнього контуру - струм джерела живлення. ФОРМУЛА ВИНАХОДУ 35 40 45 Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів у системі автоматичного регулювання, який полягає в тому, що значення сигналу регульованого параметра зовнішнього контуру віднімають від його заданого значення, одержану різницю подають на вхід регулятора зовнішнього контуру, із вихідного сигналу обмежувача сигналу задання внутрішнього контуру віднімають сигнал регульованого параметра внутрішнього контуру, одержану різницю подають на вхід регулятора внутрішнього контуру, вихідний сигнал регулятора внутрішнього контуру подають на керуючий вхід виконавчого пристрою для зміни регульованого параметра внутрішнього контуру, під дією регульованого параметра внутрішнього контуру виконавчий пристрій змінює регульований параметр зовнішнього контуру, який відрізняється тим, що вихідній сигнал регулятора зовнішнього контуру підсумовують з сигналом регульованого параметра внутрішнього контуру, одержану суму подають на вхід обмежувача сигналу задання внутрішнього контуру. 4 UA 103128 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H02P 5/00, G05B 11/01, G05B 13/02, G05B 11/32
Мітки: обмеженням, спосіб, регулюванні, внутрішнього, зовнішнього, підпорядкованому, контуру, параметрів, автоматичного, регулювання, параметра, системі
Код посилання
<a href="https://ua.patents.su/7-103128-sposib-regulyuvannya-parametra-zovnishnogo-konturu-z-obmezhennyam-parametra-vnutrishnogo-konturu-pri-pidporyadkovanomu-regulyuvanni-parametriv-v-sistemi-avtomatichnogo-regulyuvanny.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів в системі автоматичного регулювання</a>
Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів в системі автоматичного регулювання
Номер патенту: 76245
Опубліковано: 25.12.2012
Автор: Чепкунов Роман Анатолійович
МПК: G05B 11/01, H02P 5/00
Мітки: підпорядкованому, автоматичного, внутрішнього, параметрів, системі, зовнішнього, контуру, параметра, регулюванні, обмеженням, спосіб, регулювання
Формула / Реферат:
Спосіб регулювання параметра зовнішнього контуру з обмеженням параметра внутрішнього контуру при підпорядкованому регулюванні параметрів в системі автоматичного регулювання, який полягає в тому, що регульований параметр зовнішнього контуру віднімають із його заданого значення, одержану різницю подають на вхід регулятора зовнішнього контуру, із вихідного сигналу обмежувача сигналу задання внутрішнього контуру віднімають регульований параметр...
Спосіб автоматичного регулювання параметрів інерційних об’єктів із запізнюванням
Номер патенту: 67725
Опубліковано: 12.03.2012
Автори: Ковриго Юрій Михайлович, Коновалов Михайло Андрійович, Бунке Олександр Сергійович
МПК: G05B 11/00
Мітки: регулювання, об'єктів, інерційних, спосіб, запізнюванням, параметрів, автоматичного
Формула / Реферат:
Спосіб автоматичного регулювання параметрів інерційних об'єктів із запізнюванням, що полягає у формуванні керуючого сигналу за пропорційно-інтегральним законом регулювання мікропроцесорним контролером, який відрізняється тим, що керуючий сигнал формують у мікропроцесорному контролері за двоканальною структурою, при цьому швидкодію регулятора забезпечують виробленням форсуючого керуючого сигналу першим каналом згідно з функцією:
Спосіб оптимізації перехідного процесу в системі автоматичного регулювання та пристрій для його реалізації
Номер патенту: 81526
Опубліковано: 10.01.2008
Автори: Корсун Валентин Петрович, Кралін Володимир Всеволодович, Мотуз Георгій Іванович, Стеба Олександр Михайлович
МПК: G05B 11/01
Мітки: реалізації, перехідного, регулювання, пристрій, автоматичного, системі, оптимізації, спосіб, процесу
Формула / Реферат:
1. Спосіб оптимізації перехідного процесу в системі автоматичного регулювання, що базується на формуванні коректуючого сигналу за умов стрибкоподібної зміни координати вхідної дії, який відрізняється тим, що формують перший сигнал, пропорційний різниці похідних вхідної і вихідної дії системи автоматичного регулювання, та другий сигнал, пропорційний модулю різниці похідних вхідної і вихідної дії системи автоматичного регулювання, та сигнал,...
Спосіб автоматичного регулювання параметрів мікроклімату в пташнику
Номер патенту: 72630
Опубліковано: 27.08.2012
Автори: Посмітний Валерій Вікторович, Степанов Михайло Тимофійович
МПК: G05D 23/00, F24F 5/00
Мітки: спосіб, регулювання, мікроклімату, автоматичного, параметрів, пташнику
Формула / Реферат:
Спосіб автоматичного регулювання параметрів мікроклімату в пташнику, що складається з вимірювання і регулювання температури у пташнику шляхом зміни витрат палива на горіння в теплогенераторах, вимірювання і регулювання вологості у пташнику шляхом зміни витрат води на розприскування, вимірювання і регулювання розрідження у пташнику шляхом зміни величини відкриття бокових клапанів в обладнанні вентиляції пташника, корегування компенсації...
Спосіб автоматичного регулювання параметрів мікроклімату в пташнику
Номер патенту: 61154
Опубліковано: 11.07.2011
Автори: Плєвє Олександр Георгійович, Чекан Олександр Михайлович
МПК: F24F 5/00, G05D 23/00
Мітки: пташнику, параметрів, регулювання, мікроклімату, автоматичного, спосіб
Формула / Реферат:
Спосіб регулювання параметрів мікроклімату в пташнику, який включає вимірювання температури повітря у пташнику та її регулювання шляхом зміни витрат палива на горіння в теплогенераторах, який відрізняється тим, що додатково вимірюють вологість повітря та регулюють її шляхом зміни витрат води на розприскування у пташнику, вимірюють розрідження та регулюють його шляхом зміни величини відкриття бокових клапанів в обладнанні вентиляції пташника,...
Попередній патент: Кормовий стіл для тварин
Наступний патент: Спосіб позбавлення надлишкової маси тіла та використовувані при його здійсненні дієтичні добавки
Випадковий патент: Спосіб визначення вуглецю в летючій золі пиловугільних котлів теплових електростанцій