Автоматична система контролю руху автомобіля
Номер патенту: 104117
Опубліковано: 12.01.2016
Автори: Жежера Іван Володимирович, Кіеу Чук Ань, Фірсов Сергій Миколайович, Трегуб Роман Сергійович, Щербина Олександр Артурович

Формула / Реферат
Автоматична система контролю руху автомобіля, що містить центральний процесор, перший та другий виходи якого з'єднані з входами модуля пам'яті, що у свою чергу включає в себе модуль для тимчасового зберігання відеофайлів, а також комплексний блок пам'яті зберігання відеофайлів, третій вихід центрального процесора з'єднаний з сенсором розпізнання наявності живлення у мережі автомобіля, вихід блока відображення при інтервальній відеозйомці в режимі захоплення відео з'єднаний з першим входом центрального процесора, четвертий вихід центрального процесора з'єднаний з пристроєм для інтервальної відеозйомки при запуску двигуна, вихід блока захоплення зображення при інтервальній відеозйомці з'єднаний з другим входом центрального процесора, п'ятий вихід центрального процесора з'єднаний з блоком запуску відеозйомки при русі, шостий вихід з'єднаний з пристроєм відтворення аудіо, сьомий вихід з'єднаний з відеодисплеєм, вихід пристрою захоплення аудіо з'єднаний з третім входом центрального процесора, вихід модуля захоплення зображення при зміні температурного режиму з'єднаний з четвертим входом центрального процесора, вихід модуля захоплення зображення при зміні звукового сигналу з'єднаний з п'ятим входом центрального процесора, вихід модуля захоплення зображення при зміні зображення з'єднаний з шостим входом центрального процесора, вихід модуля захоплення зображення при зміні рівня гравітації з'єднаний з сьомим входом центрального процесора, вихід блока захоплення зображення з'єднаний з восьмим входом центрального процесора, восьмий вихід центрального процесора з'єднаний з приймальним блоком живлення автомобіля, дев'ятий вихід центрального процесора з'єднаний з входом внутрішнього блока живлення, яка відрізняється тим, що в систему введені блоки керування автомобіля та блок визначення дорожніх обставин, вхід блока керування з'єднаний з десятим виходом центрального процесора, вихід блока визначення дорожніх обставин з'єднаний з восьмим входом центрального процесора.
Текст
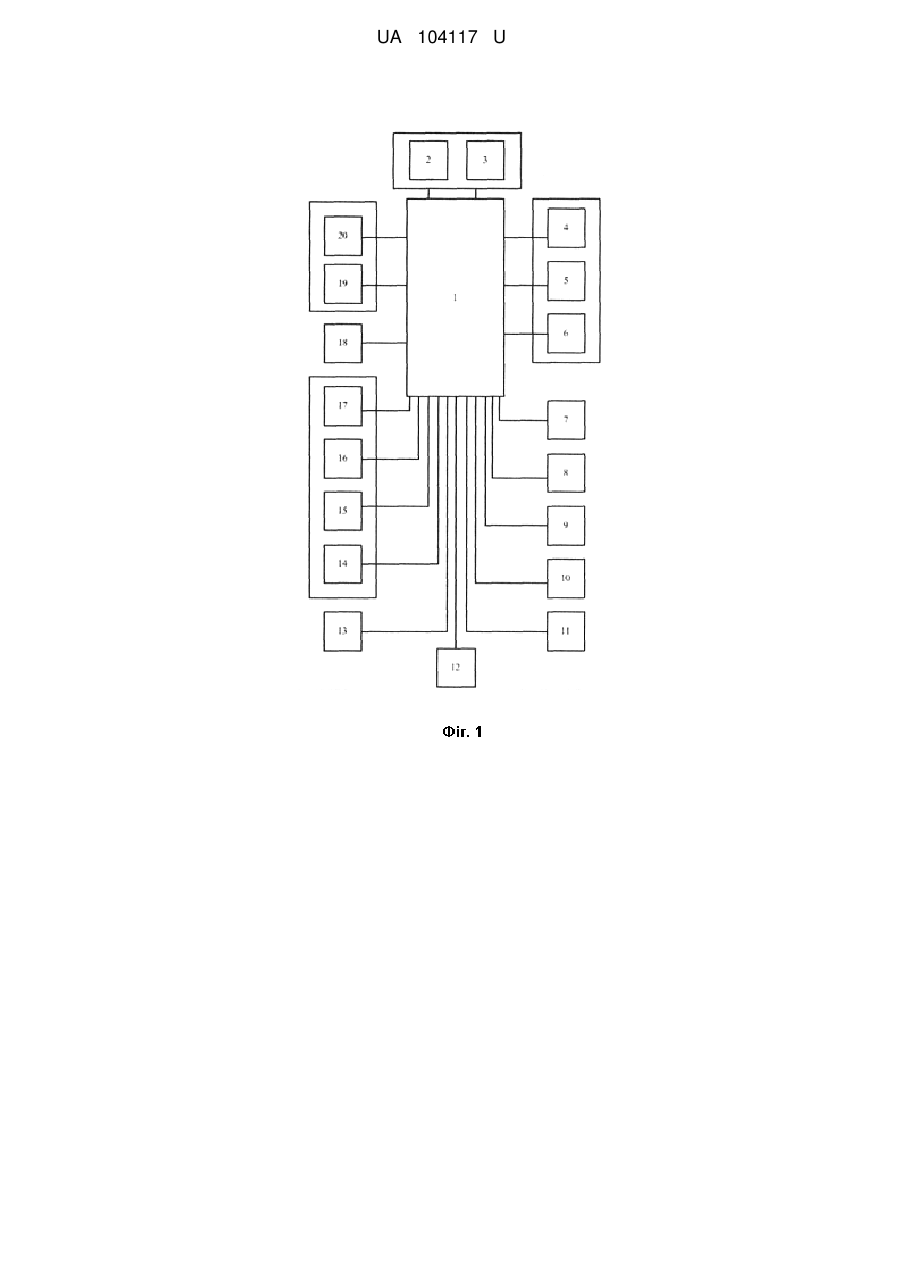
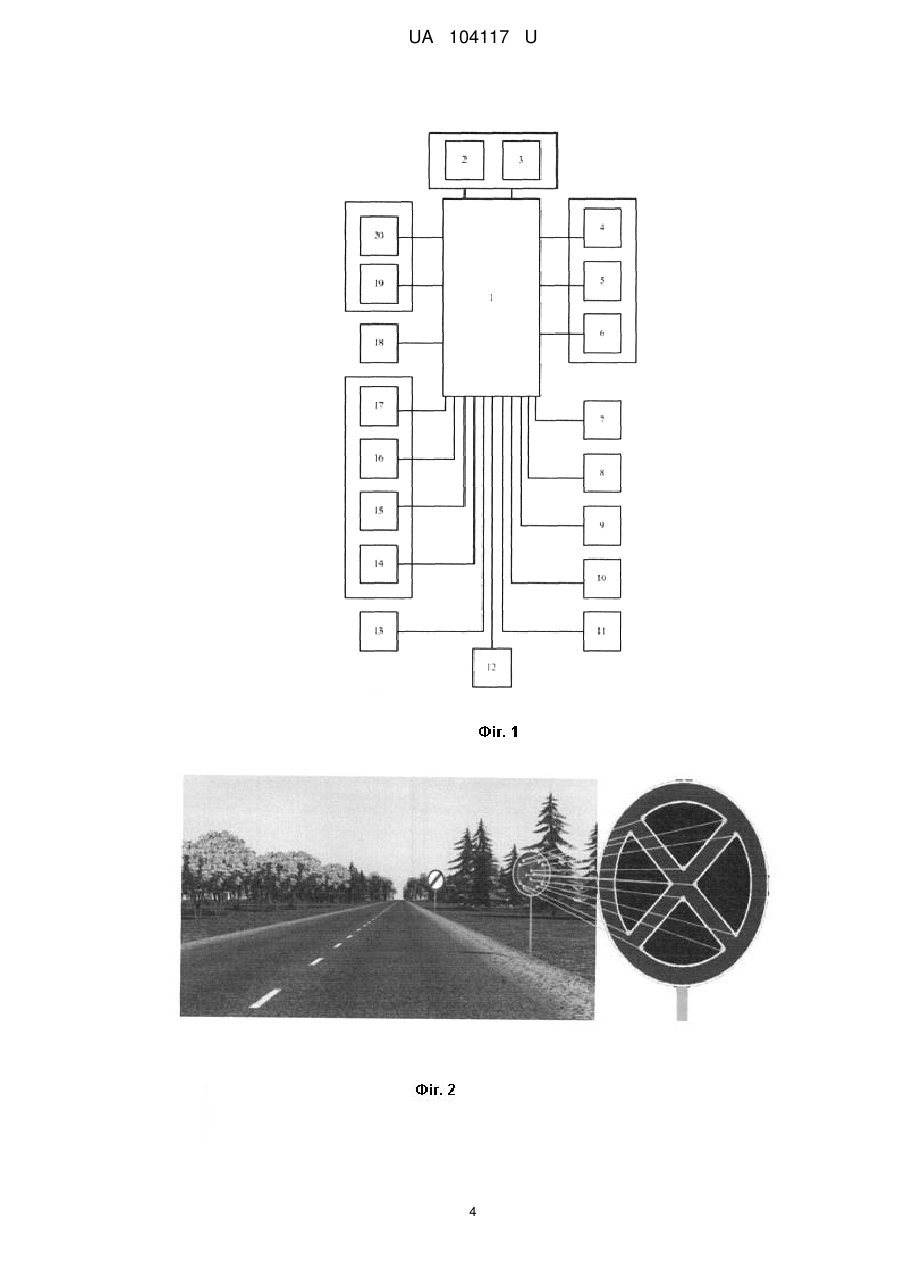
Реферат: Автоматична система контролю руху автомобіля містить центральний процесор, перший та другий виходи якого з'єднані з входами модуля пам'яті, що у свою чергу включає в себе модуль для тимчасового зберігання відеофайлів, а також комплексний блок пам'яті зберігання відеофайлів. Третій вихід центрального процесора з'єднаний з сенсором розпізнання наявності живлення у мережі автомобіля. Вихід блока відображення при інтервальній відеозйомці в режимі захоплення відео з'єднаний з першим входом центрального процесора. Четвертий вихід центрального процесора з'єднаний з пристроєм для інтервальної відеозйомки при запуску двигуна. Вихід блока захоплення зображення при інтервальній відеозйомці з'єднаний з другим входом центрального процесора. П'ятий вихід центрального процесора з'єднаний з блоком запуску відеозйомки при русі. Шостий вихід з'єднаний з пристроєм відтворення аудіо. Сьомий вихід з'єднаний з відеодисплеєм. Вихід пристрою захоплення аудіо з'єднаний з третім входом центрального процесора. Вихід модуля захоплення зображення при зміні температурного режиму з'єднаний з четвертим входом центрального процесора. Вихід модуля захоплення зображення при зміні звукового сигналу з'єднаний з п'ятим входом центрального процесора. Вихід модуля захоплення зображення при зміні зображення з'єднаний з шостим входом центрального процесора. Вихід модуля захоплення зображення при зміні рівня гравітації з'єднаний з сьомим входом центрального процесора. Вихід блока захоплення зображення з'єднаний з восьмим входом центрального процесора. Восьмий вихід центрального процесора з'єднаний з приймальним блоком живлення автомобіля. Дев'ятий вихід центрального процесора з'єднаний з входом внутрішнього блока живлення. В систему введені блоки керування автомобіля та блок визначення дорожніх обставин. Вхід блока керування з'єднаний з десятим виходом центрального процесора. Вихід блока визначення дорожніх обставин з'єднаний з восьмим входом центрального процесора. UA 104117 U (12) UA 104117 U UA 104117 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі автомобільної техніки. Найближчим аналогом до корисної моделі є «Автомобільний відеорегістратор», який у своєму складі має центральний процесор, модуль пам'яті, що у свою чергу включає в себе модуль для тимчасового зберігання відеофайлів, а також комплексний блок пам'яті зберігання відеофайлів, сенсор розпізнання наявності живлення у мережі автомобіля, блок захоплення відображення при інтервальній відеозйомці в режимі захоплення відео, пристрій для Інтервальної відеозйомки при запуску двигуна, блок захвата зображення при інтервальній відеозйомці, блоком запуску відеозйомки при русі, пристрій відтворення аудіо, відеодисплей, пристрій захоплення аудіо з'єднаний, модуль захоплення зображення при зміні температурного режиму, модуль захоплення зображення при зміні звукового сигналу, модуля захоплення зображення при зміні зображення, модуль захоплення зображення при зміні рівня гравітації, блок захвата зображення з'єднаний, приймальний блок живлення автомобіля, (див.: Патент Росії №:139576, G02B, опубл. 20 квітня, 2014). Недоліком аналога є те, що система у автоматичному режимі не може аналізувати дорожні обставини та приймати рішення щодо реагування на усунення небезпеки, що загрожує учасникам дорожнього руху. В основу корисної моделі поставлена задача підвищення безпеки на автомобільних дорогах та повного виконання правил дорожнього руху. Поставлена задача вирішується тим, що в систему автомобільного відеорегістратора, яка містить центральний процесор, перший та другий виходи якого з'єднані з входами модуля пам'яті, що у свою чергу включає в себе модуль для тимчасового зберігання відеофайлів, а також комплексний блок пам'яті зберігання відеофайлів, третій вихід центрального процесора з'єднаний з сенсором розпізнання наявності живлення у мережі автомобіля, вихід блока відображення при інтервальній відеозйомці в режимі захоплення відео з'єднаний з першим входом центрального процесора, четвертий вихід центрального процесора з'єднаний з пристроєм для інтервальної відеозйомки при запуску двигуна, вихід блока захоплення зображення при інтервальній відеозйомці з'єднаний з другим входом центрального процесора, п'ятий вихід центрального процесора з'єднаний з блоком запуску відеозйомки при русі, шостий вихід з'єднаний з пристроєм відтворення аудіо, сьомий вихід з'єднаний з відеодисплеєм, вихід пристрою захоплення аудіо з'єднаний з третім входом центрального процесора, вихід модуля захоплення зображення при зміні температурного режиму з'єднаний з четвертим входом центрального процесора, вихід модуля захоплення зображення при зміні звукового сигналу з'єднаний з п'ятим входом центрального процесора, вихід модуля захоплення зображення при зміні зображення з'єднаний з шостим входом центрального процесора, вихід модуля захоплення зображення при зміні рівня гравітації з'єднаний з сьомим входом центрального процесора, вихід блока захоплення зображення з'єднаний з восьмим входом центрального процесора, восьмий вихід центрального процесора з'єднаний з приймальним блоком живлення автомобіля, дев'ятий вихід центрального процесора з'єднаний з входом внутрішнього блока живлення, згідно з корисною моделлю, введені блоки керування автомобілем та блок визначення дорожніх обставин, вхід блока керування з'єднаний з десятим виходом центрального процесора, вихід блока визначення дорожніх обставин з'єднаний з восьмим входом центрального процесора. Корисна модель пояснюється кресленнями, де на фіг. 1 зображена функціональна схема корисної моделі автоматичної системи контролю руху автомобіля. Автоматична система контролю руху містить центральний процесор 1 модуль для тимчасового зберігання відеофайлів 2, комплексний блок пам'яті зберігання відеофайлів 3, сенсор розпізнання наявності живлення у мережі автомобіля 4, блок відображення при інтервальній відеозйомці в режимі захоплення відео 5, пристрій для інтервальної відеозйомки при запуску двигуна 6, блок захоплення зображення при інтервальній відеозйомці в режимі захоплення відео 7, блок запуску відеозйомки при русі 8, пристрій відтворення аудіо 9, відеодисплей 10, пристрій захоплення аудіо 11, блок визначення дорожніх обставин 12, блок керування автомобілем 13, модуль захоплення зображення при зміні температурного режиму 14, модуль захоплення зображення при зміні звукового сигналу 15, модуль захоплення зображення при зміні зображення 16, модуль захоплення зображення при зміні рівня гравітації 17, блок захвата зображення 18, приймальний блок живлення автомобіля 19, внутрішній блок живлення 20. Центральний процесор 1 може виконувати розрахунки і обробку зображень. Модуль для тимчасового зберігання відеофайлів 2 і комплексний блок пам'яті для зберігання відеофайлів 3 з'єднані дротами з центральним процесором 1. Модуль для тимчасового зберігання відеофайлів 2 і комплексний блок пам'яті для зберігання відеофайлів 3 використовуються для 1 UA 104117 U 5 10 15 20 25 30 35 40 45 50 55 зберігання відеопотоку. Внутрішній блок живлення 20 і приймальний блок 19 живлення автомобіля, які з'єднані дротами з центральним процесором. Внутрішній блок живлення 20 може виконувати роль батареї, а приймальний блок живлення автомобіля 19 може виконувати роль електророз'єму для електричного з'єднання з автомобільним прикурювачем через електричний з'єднувальний дріт. Блоки живлення 19, 20 використовуються здебільшого для забезпечення живлення, необхідного для роботи автоматичної системи контролю руху автомобіля. Блок захоплення зображення 18 з'єднаний дротами з центральним процесором 1. Сенсор розпізнання наявності живлення у мережі автомобіля 4, що визначає наявність живлення в мережі автомобіля, може виконувати роль пристрою обробки даних або обробного чипа для розпізнавання наявності живлення в мережі після зупинки автомобіля і заглушення двигуна, а пристрій для інтервальної відеозйомки при запуску двигуна 6 може виконувати роль фізичної або віртуального перемикача (встановлюється на сенсорному дисплеї) для запуску функцій інтервальної відеозйомки і запису відео шляхом включення автоматичної системи контролю руху автомобіля вручну. Блок захоплення зображення при інтервальній відеозйомці 7 з'єднаний дротами з блоком захоплення зображення 18, модулем для тимчасового зберігання відеоайлів 2 і комплексним блоком пам'яті для зберігання відеофайлів 3, сенсором 4, розпізнає наявність живлення в мережі автомобіля, і внутрішнім блоком живлення 20 через центральний процесор 1, або з'єднаний дротами з блоком захоплення зображення 18, модулем для тимчасового зберігання відеофайлів 2 і комплексним блоком пам'яті для зберігання відеофайлів 3, сенсором 4, розпізнає наявність живлення в мережі автомобіля, пристроєм для інтервальної відеозйомки при запуску двигуна 6 і приймальний блок живлення автомобіля 19 через центральний процесор 1. Блок визначення дорожніх обставин 12 отримує відеопотік з процесора, за допомогою заданого алгоритму шукає співпадання фрагментів зображень у внутрішній базі даних дорожніх знаків, яка знаходиться в комплексному блоці пам'яті для зберігання відеофайлів 3. У разі повного або часткового розпізнавання фрагмента зображення з відеопотоку блок визначення дорожніх обставин 12 передає сигнал про співпадання дорожніх знаків у центральний процесор 1, який у свою чергу відправляє сигнал у блок керування автомобіля 13, який у свою чергу контролює дії автомобільного транспорту. Корисна модель працює наступним чином. При захваті відеопотоку з відеокамери відбувається аналіз дорожніх обставин шляхом пошуку на відеозаписі фрагментів зображень які завантажені у систему. При знаходженні співпадань система передає керуючі сигнали на інші системі автомобіля приймаючи цим дії щодо стабілізації ситуації на дорозі (наприклад, якщо система розпізнає дорожній знак обмеження швидкості і швидкість автомобіля буде більшою, ніж обмеження на цьому відрізку дороги, то система скине швидкість автомобіля до тої, що вказана на дорожньому знаку. Якщо система розпізнає людину на дорозі та визначить що для людини присутня небезпека, то система прийме міри щодо призупинення або екстреної зупинки автомобіля, якщо це потрібно.) Основна ідея полягає у виділенні контуру зображення за допомогою фільтра DoG, після чого знайти точки і отримати їх дескриптори. Кластеризація дублікатів зводиться до пошуку співпадань дескрипторів. Ключові точки - це точки, які в ідеалі не повинні змінюватися при зміні або модифікації зображення. Дескриптори - це сукупність характеристик та представлення ключових точок у форматі доступному для перевірки на співпадіння. Дескриптори SURF - це вектори з 128 (або 64) чисел на одну ключову точку. Перевірка на співпадання виконується пошуком найближчої точки (або навіть двох). Та чим ближча точка, тим краще, однак, виявлення точок це складна операція і потребує відносно багато часу. Що не дозволяє эффективно використовувати даний алгоритм на невеликих приладах. Перевірка на співпадання проводиться підрахунком кількості відмінних позицій між двома хешами. Тобто підрахунок відстані Хемінга. І чим менше воно, чим менше розрізняються елементів, тим більше збіг. Даний спосіб розрахований на пошук повних або часткових дублікатів зображення. Тобто при значній зміні формату зображення або втручання в контент призводить до неможливості перевірки на збіг, так як хеші будуть помітно відрізнятися. Виходячи з цього було зроблено спробу об'єднати SURF дескриптори і перцептивні хеші для вирішення проблеми пошуку нечітких напівдублікатів. Спосіб ґрунтується на кластеризації ключових точок таким чином, щоб центри кластерів збігалися на оригінальному зображенні. А далі вироблялося виділення фрагмента зображення навколо ключової точки та отримання перцептивного хешу. При цьому у даному методі є такі недоліки як: 2 UA 104117 U 5 10 15 20 25 30 1. низька швидкість перевірки на збіг на великому наборі хешів. Пошук по 1 млн хешів займало 20 секунд 2. низька швидкість отримання ключових точок 3. низька точність, безліч помилкових спрацьовувань, високі вимоги до цільової бази, годиться не для всіх зображень, вимагає премодерації і т.д. Складність пошуку і підрахунку відстані Хеммінга на великому наборі даних є самостійною проблемою і вимагає незалежного підходу. Для вирішення проблеми був вибраний і реалізований найбільш ефективний з наявних алгоритм названий HEngine, який дозволив в ~ 60 разів прискорити вибірку з бази даних. Так як виконується обробка бінарними хешамі або відбитками, а збіг вважаємо відстанню Хеммінга, то дивно використовувати такі великі ресурси як SURF і варто було б розглянути інші методи отримання ключових точок і дескрипторів. Бінарні дескриптори підходять для вирішення завдання, тому що також використовують відстань Хеммінга для перевірки на збіги. ORB - це Oriented FAST and Rotated BRIEFполіпшена версія і комбінація детектора ключових точок FAST і бінарних дескрипторів BRIEF. Перевірка на збіг - це сума відстаней Хеммінга для кожного байта дескриптора (перший порівнюється з першим, другий з другим і т.д.). Так як наш хеш це 64 бітне число, то потрібно 32 байта дескриптора стиснути в 8 байт і при цьому не сильно втратити в точності. Принцип роботи індексації полягає у отриманні ключових точок і дескрипторів ORB, вибір кількості необхідних точок на зображенні, отримані дескриптори по 32 байта представляємо у вигляді бітової матриці 16x16, конвертуванні матриці у 64 бітне число за допомогою PHash та зберігання 64 бітне відбитки в MySQL. При цьому знаходиться спосіб швидкого підрахунку відстані Хеммінга на великому наборі даних, збільшується швидкість виділення ключових точок та їх відбитків, не втрачається точність. Це дозволяє знаходити зображення по їх фрагменту, а також нечіткі напівдублікати без великих обчислювальних ресурсів (див. фіг. 2). Враховуючи те, що в залежності від налаштувань, описаний алгоритм через бінарні дескриптори ОРБ видає близько 1000 хешів на картинку. На базу в 1000 зображень виходить 1 000 000 хешів в базі. Пошук і кластеризація всіх дублікатів займає півтори хвилини. Включає в себе повний перебір і пошук співпадаючих хешів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 50 55 Автоматична система контролю руху автомобіля, що містить центральний процесор, перший та другий виходи якого з'єднані з входами модуля пам'яті, що у свою чергу включає в себе модуль для тимчасового зберігання відеофайлів, а також комплексний блок пам'яті зберігання відеофайлів, третій вихід центрального процесора з'єднаний з сенсором розпізнання наявності живлення у мережі автомобіля, вихід блока відображення при інтервальній відеозйомці в режимі захоплення відео з'єднаний з першим входом центрального процесора, четвертий вихід центрального процесора з'єднаний з пристроєм для інтервальної відеозйомки при запуску двигуна, вихід блока захоплення зображення при інтервальній відеозйомці з'єднаний з другим входом центрального процесора, п'ятий вихід центрального процесора з'єднаний з блоком запуску відеозйомки при русі, шостий вихід з'єднаний з пристроєм відтворення аудіо, сьомий вихід з'єднаний з відеодисплеєм, вихід пристрою захоплення аудіо з'єднаний з третім входом центрального процесора, вихід модуля захоплення зображення при зміні температурного режиму з'єднаний з четвертим входом центрального процесора, вихід модуля захоплення зображення при зміні звукового сигналу з'єднаний з п'ятим входом центрального процесора, вихід модуля захоплення зображення при зміні зображення з'єднаний з шостим входом центрального процесора, вихід модуля захоплення зображення при зміні рівня гравітації з'єднаний з сьомим входом центрального процесора, вихід блока захоплення зображення з'єднаний з восьмим входом центрального процесора, восьмий вихід центрального процесора з'єднаний з приймальним блоком живлення автомобіля, дев'ятий вихід центрального процесора з'єднаний з входом внутрішнього блока живлення, яка відрізняється тим, що в систему введені блоки керування автомобіля та блок визначення дорожніх обставин, вхід блока керування з'єднаний з десятим виходом центрального процесора, вихід блока визначення дорожніх обставин з'єднаний з восьмим входом центрального процесора. 3 UA 104117 U 4 UA 104117 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюFirsov Sergiy Mykolayovych, Shcherbyna Oleksandr Arturovych, Tregub Roman Sergiyovych, Kieu Chuk An, Zhezhera Ivan Volodymyrovych
Автори російськоюФирсов Сергей Николаевич, Щербина Александр Артурович, Трегуб Роман Сеогеевич, Киеу Чук Ань, Жежера Иван Владимирович
МПК / Мітки
МПК: G01C 23/00, G06F 13/00, H04N 21/00
Мітки: автоматична, система, руху, автомобіля, контролю
Код посилання
<a href="https://ua.patents.su/7-104117-avtomatichna-sistema-kontrolyu-rukhu-avtomobilya.html" target="_blank" rel="follow" title="База патентів України">Автоматична система контролю руху автомобіля</a>
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди
Номер патенту: 91792
Опубліковано: 25.08.2010
Автори: Лук'янов Олександр Михайлович, Сітенко Олександр Миколайович, Лук'янова Ольга Олексіївна, Грінченко Олена Володимирівна, Дохов Олександр Іванович
МПК: G08G 1/056, G08G 1/052, G01C 21/26
Мітки: автоматизованого, дорожньо-транспортної, руху, правил, дотримання, виникнення, система, автомобіля, водієм, контролю, дорожнього, пригоди, факту, визначення
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GPS/GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні...
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху

Номер патенту: 88999
Опубліковано: 10.12.2009
Автори: Лук'янов Олександр Михайлович, Дохов Олександр Іванович, Грінченко Олена Володимирівна, Лук'янова Ольга Олексіївна
МПК: G08G 1/052, G08G 1/056, G01C 21/26
Мітки: водієм, автомобіля, правил, руху, контролю, система, дорожнього, автоматизованого, дотримання
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні апаратно-програмні модулі, а багатофункціональна автомобільна...
Система координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху
Номер патенту: 96433
Опубліковано: 10.02.2015
Автори: Бандура Іван Миколайович, Дергачов Константин Юрійович, Саратова Тетяна Сергіївна, Кулік Анатолій Степанович
МПК: G08G 1/01
Мітки: засобів, комплексного, контролю, координації, безпекою, транспортних, транспортного, система, руху
Формула / Реферат:
Система координації руху транспортних засобів і комплексного контролю за безпекою транспортного руху, що містить антену супутникової навігації, на вхід якої надходить інформація від супутників, а вихід з'єднаний з першим входом першого блока управління на базі ЕОМ, що розміщений на посту-комутаторі, першу антену системи GSM, вихід якої з'єднаний з другим входом першого блока управління, перший модуль безпровідної передачі даних, вхід якого...
Автоматизована система збору інформації про параметри руху автомобіля та аналізу причин виникнення дорожньо-транспортної пригоди
Номер патенту: 101717
Опубліковано: 25.04.2013
Автори: Грінченко Олена Володимирівна, Лук'янова Ольга Олексіївна, Дохов Олександр Іванович, Лук'янов Олександр Михайлович, Галевич Максим Миколайович
МПК: G08G 1/056, G08G 1/052, G01C 21/28
Мітки: параметри, збору, пригоди, причин, руху, інформації, аналізу, виникнення, дорожньо-транспортної, автомобіля, автоматизована, система
Формула / Реферат:
Автоматизована система збору інформації про параметри руху автомобіля та аналізу причин виникнення дорожньо-транспортної пригоди, що включає в себе: центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу багатофункціональної автомобільної бортової апаратури входять: GPS/GNSS-приймач, блок розподілу потоків даних, блок...
Пристрій для контролю параметрів руху автомобіля
Номер патенту: 44105
Опубліковано: 25.09.2009
Автори: Слепов Лев Іванович, Блаженний Валерій Іванович
МПК: B60K 35/00
Мітки: пристрій, руху, контролю, параметрів, автомобіля
Формула / Реферат:
Пристрій для контролю параметрів руху автомобіля, який містить бортовий комп'ютер, цифрову відеокамеру, причому бортовий комп'ютер розташовано на передній панелі приладів, а цифрова відеокамера розташована на дзеркалі заднього виду в салоні автомобіля, який відрізняється тим, що додатково містить чотири веб-камери, засіб запису інформації, які розміщені на автомобілі, причому перша веб-камера розташована на внутрішній стороні лобового скла,...
Попередній патент: Спосіб одержання гранул
Наступний патент: Парогенератор
Випадковий патент: Пристрій для регулювання положення лопаток з регульованим кутом установки