Привід горизонтального наведення і стабілізації танкового озброєння
Номер патенту: 60908
Опубліковано: 17.04.2006
Автори: Коваленко Олексій Олександрович, Корсун Валентин Петрович, Мотуз Георгій Іванович, Старков Юрій Володимирович, Бондаренко Олександр Григорович, Кралін Володимир Всеволодович, Хандога Анатолій Максимович
Формула / Реферат
Способ прогнозирования землетрясений основан на оценке персоналом централизованной сети постов прогнозирования сейсмоопасности нервно-эмоционального состояния штатных для этих постов и других сейсмочувствительных животных до и после землетрясений в основном по интенсивности психогенного потоотделения на подошвенной части лапок этих животных. По концентрическому размещению и радиальным размерам разброса по поверхности земли близких по значениям показателей этого потоотделения в региональных и национальных центрах прогнозирования сейсмоопасности с высокой точностью устанавливают место, мощность и время предстоящего землетрясения, а потом и исчезновение сейсмоопасности.
Текст
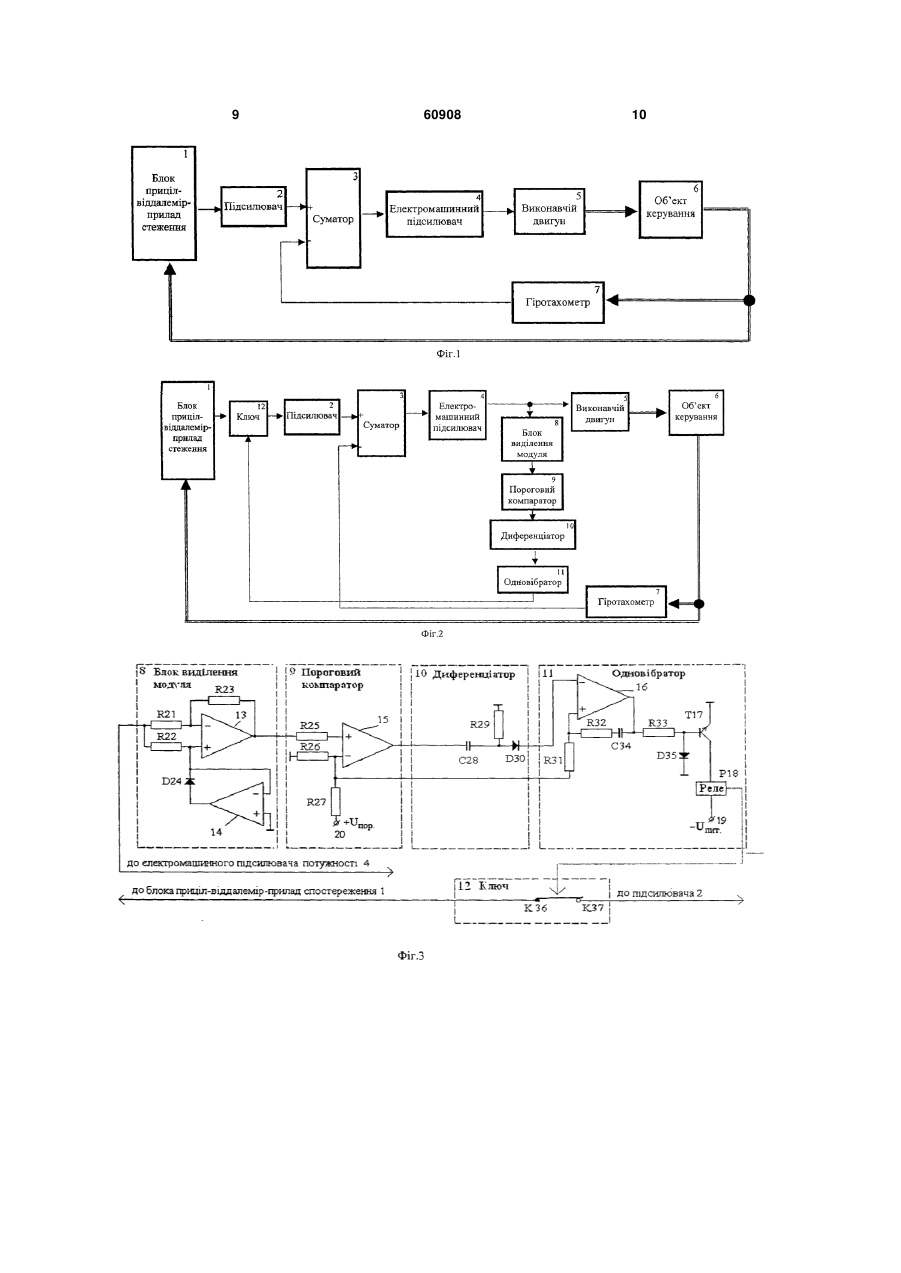
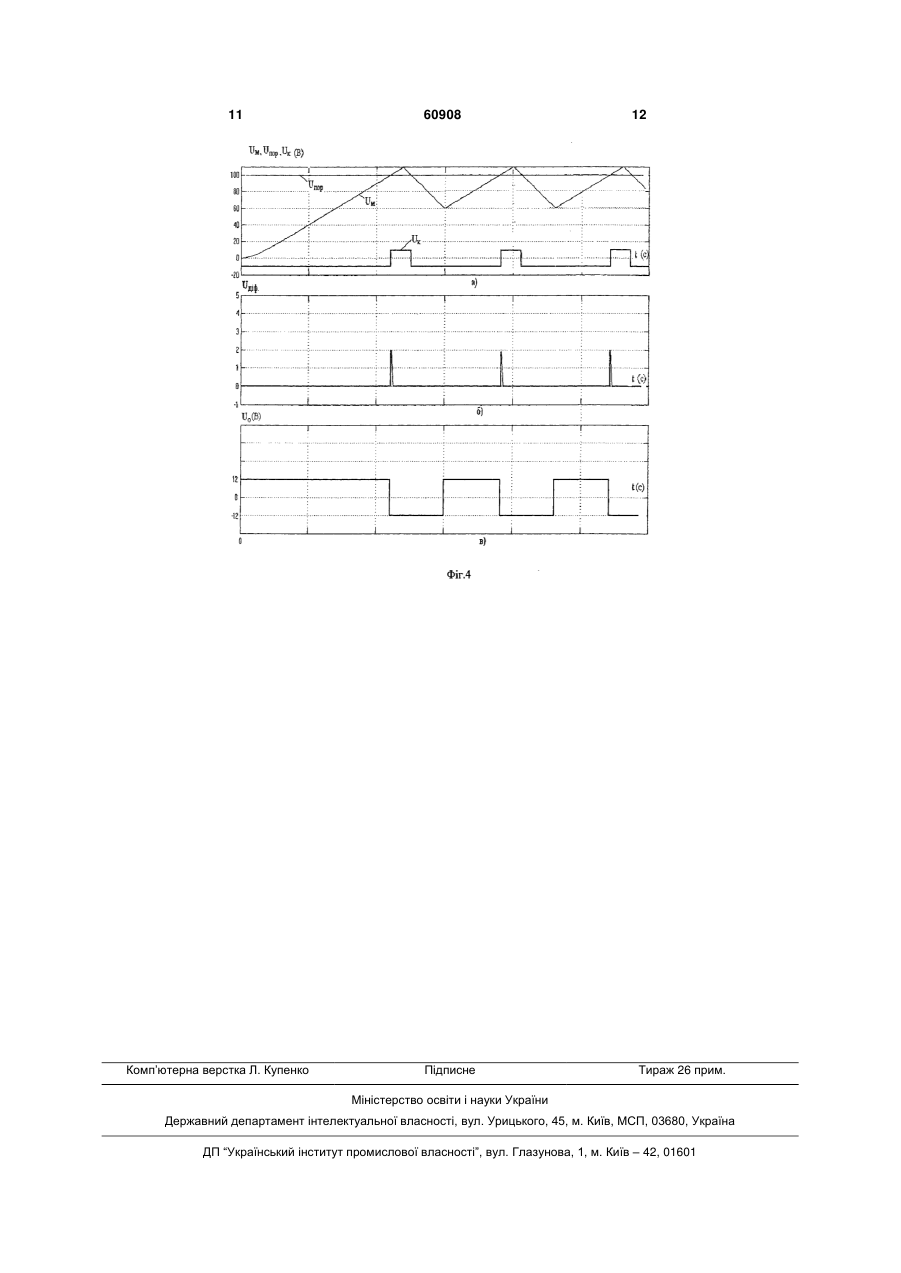
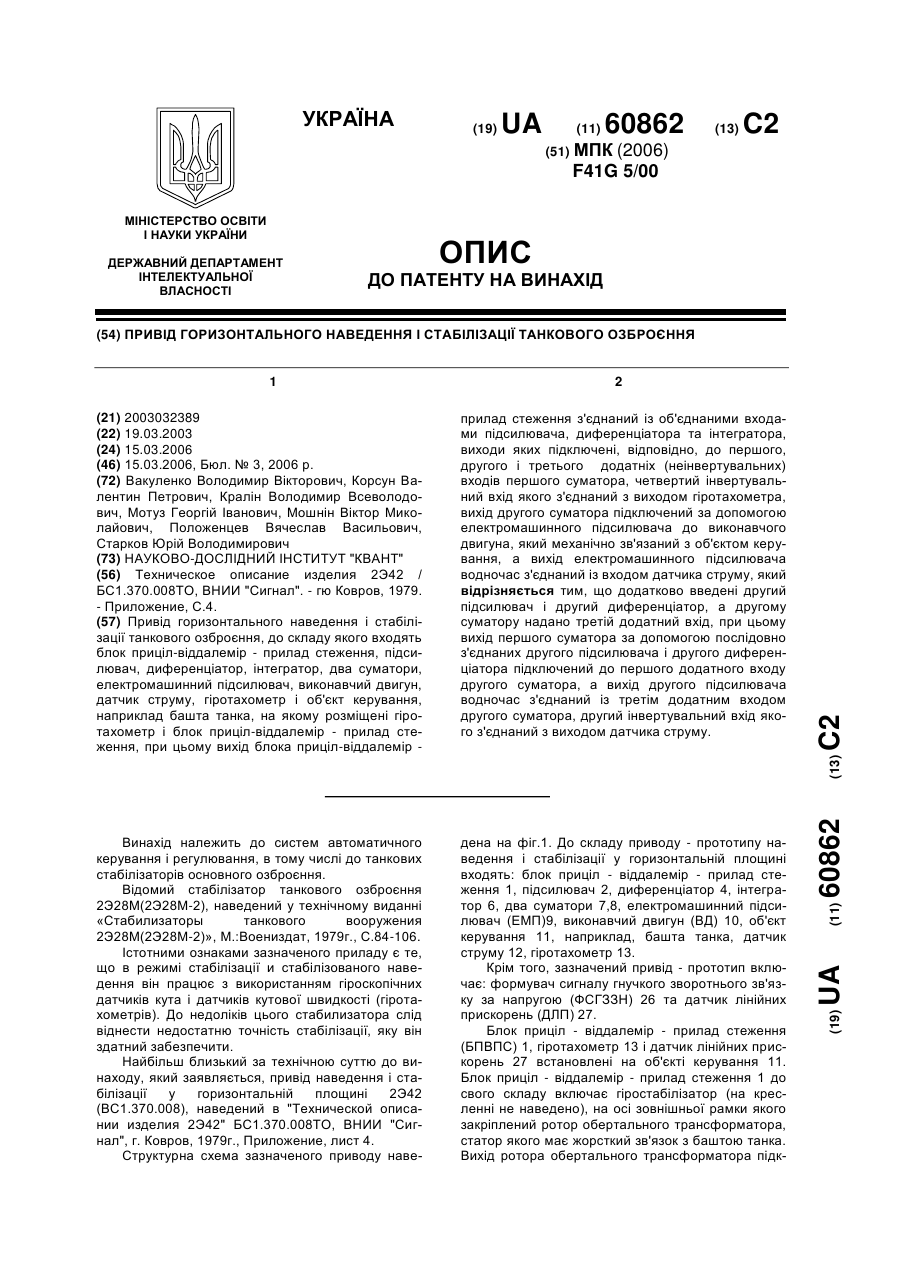
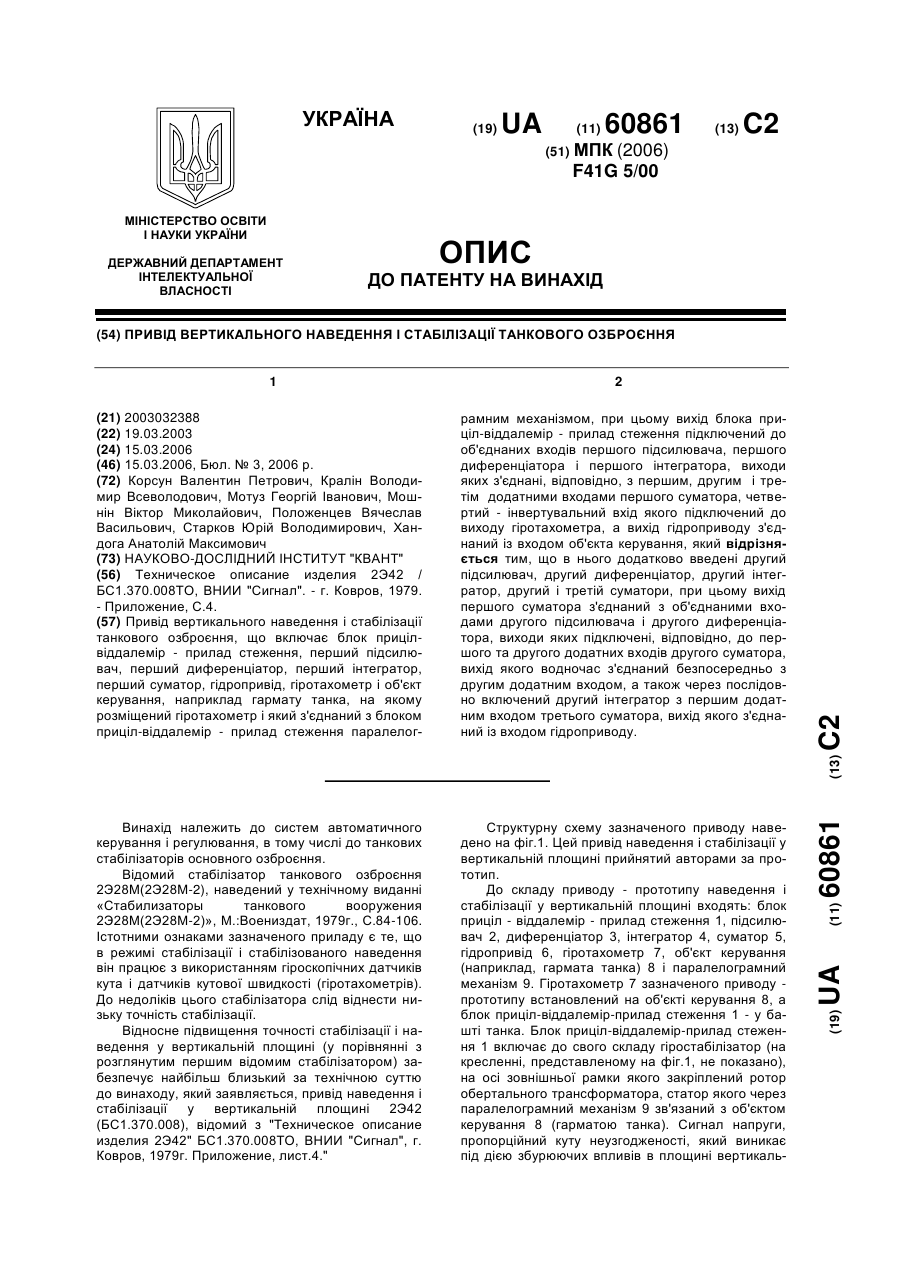
Привід горизонтального наведення і стабілізації танкового озброєння, що містить блок приціл-віддалемір прилад стеження та послідовно з'єднані підсилювач, суматор, 3 зазначених ручних органів керування у відповідний бік) датчик кута, встановлений на валу гіроскопічного стабілізатора, формує сигнал, пропорційний максимальному куту неузгодженості між віссю гіростабілізатора і положенням об'єкта керування 6, наприклад, положенням башти танка. На осі зовнішньої рамки датчика кута змонтований ротор обертального трансформатора, статор якого жорстко зв'язаний з об'єктом керування, наприклад, баштою танка. Виходом БПВПС 1 є обмотка ротора обертального трансформатора, яка підключена до входу підсилювача 2, вихід якого з'єднаний із входом суматора 3. Вихід гіротахометра 7 підключений до другого інвертуючого входу зазначеного суматора, у якому вихідний сигнал підсилювача 2 алгебраїчно складається із вихідним сигналом гіротахометра 7. Вихід суматора 3 з'єднаний із входом ЕМПП 4, на який подається сигнал керування. Вихід ЕМПП 4 безпосередньо зв'язаний з входом виконавчого двигуна 5, який механічно з'єднаний з об'єктом керування 6, завдяки чому зазначений сигнал керування викликає обертовий рух об'єкта керування, наприклад, неврівноваженої башти танка, з максимальною швидкістю (без урахування часу перехідного процесу). Слід зазначити, що на відміну від запропонованого винаходу, зв'язок між контактами обмотки ротора обертального трансформатора, що входить до складу (БПДПС) 1, і підсилювачем 2 безпосередньо прямий. Привід-прототип зберігає недолік попередньо розглянутого приводу-аналогу щодо можливості виникнення режимів роботи виконавчого двигуна, що призводять до недостатньої надійності його роботи, а саме: у приводі-прототипі при виконанні наведення неврівноваженої башти танка з перекидною швидкістю за умов його поперечного нахилу (крену) можливе виникнення умов для додаткового зростання напруги на клемах виконавчого двигуна. Це зумовлено додатковим розгоном останнього, який спричиняється моментом неврівноваженості об'єкта керування (наприклад, башти танка), коли знак збурюючого моменту від неврівноваженості зазначеного об'єкта керування співпадає із знаком моменту, який створюється виконавчим двигуном. При цьому зростаюча напруга на клемах виконавчого двигуна, що супроводжується порушенням процесів комутації, може стати причиною виходу виконавчого двигуна з ладу. Завданням винаходу є підвищення надійності роботи приводу горизонтального наведення і стабілізації танкового озброєння завдяки забезпеченню захисту виконавчого двигуна від зазначеної підвищеної напруги на його клемах у режимі наведення неврівноваженої башти з перекидною швидкістю за умов крену танка. Завдання вирішується за рахунок того, що в привід горизонтального наведення і стабілізації танкового озброєння, який працює у режимі наведення з перекидною швидкістю за умов наявності крену танка і включає до свого складу послідовно з'єднані блок приціл-віддалемірприлад стеження, підсилювач, суматор, 60908 4 електромашинний підсилювач потужності, виконавчий двигун, гіротахометр і об'єкт керування, наприклад, у вигляді башти танка, при цьому гіротахометр і блок приціл-віддалемірприлад стеження змонтовані на об'єкті керування, а вихід підсилювача підключений до першого неінвертуючого входу суматора, з другим інвертуючим входом якого з'єднаний вихід гіротахометра, введені ключ, виконаний з можливістю комутації виходу блок прицілвіддалемір-прилад стеження із входом підсилювача і послідовно включений між ними, а також послідовно з'єднані блок виділення модуля, пороговий компаратор, диференціатор та одновібратор, вихід якого підключений до керуючого входу ключа який своїм виходом підключений до входу підсилювача, а вхід блока виділення модуля підключений до виходу електромашинного підсилювача потужності водночас із входом виконавчого двигуна. Введення ключа за наявності керуючого сигналу дозволяє комутувати вихід блока прицілвіддалемір-прилад стеження із входом підсилювача, що забезпечує можливість створення гальмового моменту на виконавчому двигуні за умов наближення напруги на його клемах до критичного значення. Введення блока виділення модуля дозволяє спрямляти та вимірювати напругу на клемах виконавчого двигуна. Введення порогового компаратора дозволяє порівнювати величину еталонного сигналу із виміряною напругою на клемах виконавчого двигуна за умов, коли остання перевищує значення еталонного сигналу, формувати сигнал, наприклад, у вигляді прямокутного імпульсу позитивної полярності. Введення диференціатора дозволяє сформувати додатний і від'ємний імпульси (відповідно до фронтів прямокутного імпульсу) за умов надходження на його вхід відповідного сигналу з виходу порогового компаратора. Введення одновібратора дозволяє відповідно до позитивного імпульсу, що надходить з виходу диференціатора, сформувати сигнал керування ключем у вигляді прямокутного імпульсу позитивної полярності, який комутує вихід блока приціл-віддалемір-прилад стеження із входом підсилювача, завдяки чому створюється імпульсний гальмовій момент на виконавчому двигуні. Співставлювальний аналіз з прототипом виявив, що пристрій, який заявляється, відрізняється наявністю нових блоків, а саме: ключа, блока виділення модуля, порогового компаратора, диференціатора, одновібратора, а також відмінністю зв'язків як відомих складових частин схеми між собою, так і їх зв'язками із введеними новими блоками. До теперішнього часу авторам і заявнику не були відомі приводи горизонтального наведення танкового озброєння, які б характеризувалися складом і зв'язками, притаманними пристрою, який заявляється. Тому запропоноване технічне рішення відповідає критерію "новизна". 5 Порівняння запропонованого технічного рішення з відомими технічними рішеннями щодо приводів горизонтального наведення і стабілізації танкового озброєння виявило, що окремо взяті частини його схеми, а саме: ключ, блок виділення модуля, пороговий компаратор, диференціатор, одновібратор, які входять до складу пристрою, який заявляється, самі собою відомі і широко застосовуються в техніці, однак їх застосування у зазначеному зв'язку із іншими складовими блоками пристрою дозволяють створити імпульсний гальмовій момент на виконавчому двигуні за умов наближення напруги на його клемах до критичного значення (встановлюється еталонним сигналом). Це дозволяє зробити висновок про відповідність представленого технічного рішення критерію "винахідницький рівень". Суть винаходу пояснюється кресленнями: на Фіг.1 наведено блок-схему пристроюпрототипу; на Фіг.2 наведено структурну схему запропонованого пристрою (за незалежним пунктом патентної формули); на Фіг.3 наведено один з варіантів конкретної реалізації запропонованого пристрою; на Фіг.4 наведено часові діаграми, що пояснюють роботу запропонованого пристрою. Запропонований пристрій, наведений на Фіг.2, включає: блок приціл-віддалемір-прилад стеження (БПВПС) 1, підсилювач 2, суматор 3, електромашинний підсилювач потужності (ЕМПП) 4, виконавчий двигун 5, об'єкт керування (ОК) 6, наприклад, башта танка, гіротахометр 7, блок виділення модуля (БВМ) 8, пороговий компаратор 9, диференціатор 10, одновібратор 11 і ключ 12. БПВПС 1 і гіротахометр 7 встановлені на об'єкті керування 6, наприклад, на башті танка. Вихід БПВПС 1 через послідовно з'єднані ключ 9, підсилювач 2, перший вхід суматора 3, ЕМПП 4 і виконавчий двигун 5 з'єднаний із входом ОК 6, наприклад, з баштою танка, яка може бути неврівноваженою. Одночасно вихід ЕМПП 4 через послідовно з'єднані блок БВМ 8, пороговий компаратор 9, диференціатор 10 і одновібратор 11 підключений до керуючого входу ключа 12. Вихід гіротахометра 7, встановленого на об'єкті керування 6, підключений до другого інвертуючого входу суматора 3. До складу БПВПС 1 входять пульт керування і гіроскопічний стабілізатор, на валу якого встановлено датчик кута (на Фіг.2 не наведено). На осі зовнішньої рамки датчика кута змонтований ротор обертального трансформатора, статор якого жорстко зв'язаний з баштою танка. Обмотка ротора обертального трансформатора підключена до виходу БПВПС 1. Введені нові блоки, а саме: БВМ 8, пороговий компаратор 9, диференціатор 10, одновібратор 11 і ключ 12 (див. Фіг.2, 3) можуть виконуватись відповідно на основі операційних підсилювачів 13, 14, 15, 16 і транзистора Т17 і реле Р18, один з кінців обмотки якого підключений до негативного контакту 19 джерела живлення. 60908 6 До складу порогового компаратора 9 введено джерело еталонного живлення 20. Можливий варіант виконання БВМ 8 може бути побудований за схемою двохнапівперіодного випрямлювача вхідного сигналу, реалізований на операційних підсилювачах 13 та 14 і включати до свого складу три резистори R21, R22, R23 і діод 24. Вихід ЕМПП 4 за напругою через резистор R21 зв'язаний з інвертуючим входом операційного підсилювача 13 і через резистор R22 - з катодом напівпровідникового діода D24, інвертуючим входом операційного підсилювача 14 і неінвертуючим входом операційного підсилювача 13, вихід якого через резистор R23 з'єднаний із власним інвертуючим входом. Неінвертуючий вхід операційного підсилювача 14 з'єднаний з корпусом, а вихід - з анодом напівпровідникового діода D24. Вихід операційного підсилювача 13 є виходом БВМ 8. Пороговий компаратор 9, крім операційного підсилювача 15, включає три резистори R25, R26, R27. Вихід БВМ 8 через резистор R25 з'єднаний з неінвертуючим входом операційного підсилювача 15, інвертуючий вхід якого через резистор R26 з'єднаний з корпусом. Водночас інвертуючий вхід операційного підсилювача 15 через резистор R27 з'єднаний з позитивним електродом 20 джерела еталонного живлення. З виходу операційного підсилювача 15 сигнал подається на вхід диференціатора 10. Диференціатор 10 у даному конкретному варіанті схеми виконаний з використанням конденсатору С28, резистора R29 та напівпровідникового діода D30. Вхід диференціатора 10 через конденсатор С28 з'єднаний з анодом напівпровідникового діода D30, який через резистор R29 з'єднаний з корпусом. Катодний контакт напівпровідникового діода D30 є водночас вихідним контактом диференціатора 10. Одновібратор 11 може бути реалізовано з використанням операційного підсилювача 16 і транзистора Т17, навантаженням колекторного кола якого є обмотка реле Ρ18. Крім цього, схема одновібратора 11 включає три резистори R31, R32, R33, конденсатор С34 і діод D35. Вхід одновібратора 11 з'єднаний з виходом диференціатора 10, а також з інвертувальним входом операційного підсилювача 16, вихід якого через послідовно з'єднані конденсатор С34 і резистор R32 підключений до власного неінвертуючого входу, який через резистор R31 з'єднаний з інвертувальним входом операційного підсилювача 15, що входить до складу порогового компаратора 9. Водночас вихід операційного підсилювача 16 через резистор R33 з'єднаний з базою транзистора Т17, емітер якого з'єднаний з корпусом, а колектор через обмотку реле Р18 - з від'ємним електродом 19 джерела живлення. Базу транзистора Т17 водночас підключено до аноду напівпровідникового діода D35, катод якого з'єднаний з корпусом. Один з варіантів реалізації ключа 12 може бути з використанням нормально замкнених контактів К36 і К37 реле Ρ18, які за наявності 7 керуючого сигналу на виході операційного підсилювача 16, розмикаються. Часові діаграми, які ілюструють роботу заявляємого пристрою наведені на Фіг.4, де: Uм - крива зміни напруги на виході БВМ 8; Uпор значення еталонної напруги, встановленої у пороговому компараторі 9; Uк - крива зміни напруги на виході порогового компаратора 9; Uдиф - крива зміни напруги на виході диференціатора 10; Uо - крива зміни напруги на виході операційного підсилювача 16, що входить до складу одновібратора 11. Робота привода горизонтального наведення і стабілізації танкового озброєння за умов наведення з перебросовою швидкістю неврівноваженої башти танка, який має поперечний нахил (крен), зводиться до наступного. За умов максимального відхилення (максимального кута обертання) рукояток пульта керування, що входить до складу БПВПС 1 (на Фіг.2, 3 не наведено) у відповідний бік гіроскопічний стабілізатор максимально відхиляє зовнішню рамку датчика кута (на Фіг.2, 3 не наведено). Закріплені на осі зовнішньої рамки датчика кута ротор обертального трансформатора повертається відносно статора, який жорстко зв'язаний з баштою танка. При цьому формується сигнал максимального кута неузгодженості між віссю гіростабілізатора і положенням башти танка, який через нормально замкнені контакти К36, К37 реле P18 (відповідають положенню замкненого ключа 12) надходить на вхід підсилювача 2. Вихідний сигнал підсилювача 2 алгебраїчно сумується з електричним сигналом з виходу гіротахометра 7, пропорційним швидкості обертання виконавчого двигуна 5. За умов максимального кута неузгодженості між віссю гіростабілізатора і положенням об'єкта керування (наприклад, башти танка) сигнал на виході підсилювача 2 за модулем перевищує сигнал від'ємного зворотного зв'язку за швидкістю, який формується гіротахометром 7. Результуючий сигнал керування на виході суматора 3 призводить до насичення ЕМПП 4, вихідна напруга якого надходить на клеми виконавчого двигуна 5. Останній розвертає об'єкт керування (наприклад, башту танка) відносно корпуса з максимальною перекидною швидкістю у бік, що відповідає напрямку відхилення (повороту) рукояток пульта керування. У режимі перекидання з максимальною швидкістю за умов наявності крену танка під дією моменту неврівноваженості в той час, коли знаки діючого на об'єкт керування (наприклад, башта танка) моменту неврівноваженості і моменту виконавчого двигуна співпадають, об'єкт керування (наприклад, башта танка) набирає додаткового розгону. За цих умов напруга на клемах виконавчого двигуна 5 додатково зростає. 60908 8 Підключений до виходу електромашинного підсилювача потужності 4 (див. Фіг.4) блок виділення модуля 8 формує сигнал Uм, пропорційний модулю напруги на клемах виконавчого двигуна 5, який порівнюється з етелонним сигналом Uпор у пороговому компараторі 9. У випадку, коли модуль напруги на клемах виконавчого двигуна 5 перевищує значення еталонного сигналу Uпор, пороговий компаратор 9 формує сигнал у вигляді імпульсу додатної полярності Uк+, у відповідності до переднього фронту якого диференціатор 10 формує імпульс позитиної полярності Uдиф, який запускає одновібратор 11. Операційний підсилювач 16 одновібратора 11 (див. Фіг.3) формує сигнал керування Uо транзистором Т17. Останній відкривається і призводить до протікання струму живлення обмотки реле Ρ18. Контакти К36 і К37 реле Р18 розмикаються, відключаючи тим самим вхід підсилювача 2 від виходу БПВПС 1. Внаслідок цього сигнал негативного зворотного зв'язку з виходу гіротахометра 7 через інвертуючий вхід суматора 3 і електромашинний підсилювач потужності 4 забезпечує встановлення режиму "противключення" виконавчого двигуна 5, здійснюючи, таким чином, гальмування об'єкта керування (наприклад, башти танка). Довжина імпульсу на виході операційного підсилювача 16 (входить до складу одновібратора 11) в цілому залежить від параметрів системи і обирається такою, щоб забезпечити по закінченні дії зазначеного імпульсу зменшення модуля напруги на клемах виконавчого двигуна 5 до величини на (30-40)% меншої у порівнянні з еталонною напругою у пороговому компараторі 9. По завершенні часу проходження імпульсу з виходу операційного підсилювача 16 транзистор Т17 закривається, протікання струму в колі обмотки реле Р18 припиняється, внаслідок чого ключ 12 замикається, підключаючи вихід БПВПС 1 до входу підсилювача 2. Після цього об'єкт керування (наприклад, башта танка) знову розганяється до максимальної швидкості перекидання. Цикл роботи пристрою повторюється за наявністю умов підвищення напруги на клемах виконавчого двигуна 5 у порівнянні з еталонним сигналом Uпор. Таким чином, привід горизонтального наведення і стабілізації танкового озброєння за винаходом забезпечує захист виконавчого двигуна від перенапруги на його клемах, завдяки чому забезпечується підвищення надійності зазначеного приводу в цілому. Усі блоки і вузли привода горизонтального наведення і стабілізації танкового озброєння можуть бути виконані на елементній базі серійного промислового виготовлення, у тому числі: введені нові блоки - БВМ 8, пороговий компаратор 9 і одновібратор 10 - можуть бути реалізованими на операційних підсилювачах серійного випуску, наприклад, серії 140УД7, транзисторі 2Т830А і реле типу РЕС 47. 9 60908 10 11 Комп’ютерна верстка Л. Купенко 60908 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive of horizontal pointing and stabilization of tank arms
Автори англійськоюBondarenko Oleksandr Hryhorovych, Korsun Valentyn Petrovych, Kralin Volodymyr Vsevolodovych, Motuz Heorhii Ivanovych
Назва патенту російськоюПривод горизонтального наведения и стабилизации танкового вооружения
Автори російськоюБондаренко Александр Григорьевич, Корсун Валентин Петрович, Кралин Владимир Всеволодович, Мотуз Георгий Иванович
МПК / Мітки
МПК: F41G 5/00
Мітки: озброєння, горизонтального, стабілізації, наведення, привід, танкового
Код посилання
<a href="https://ua.patents.su/6-60908-privid-gorizontalnogo-navedennya-i-stabilizaci-tankovogo-ozbroehnnya.html" target="_blank" rel="follow" title="База патентів України">Привід горизонтального наведення і стабілізації танкового озброєння</a>
Привід горизонтального наведення і стабілізації танкового озброєння
Номер патенту: 60862
Опубліковано: 15.03.2006
Автори: Кралін Володимир Всеволодович, Положенцев В'ячеслав Васильович, Старков Юрій Володимирович, Мошнін Віктор Миколайович, Вакуленко Володимир Вікторович, Мотуз Георгій Іванович, Корсун Валентин Петрович
МПК: F41G 5/00
Мітки: танкового, стабілізації, озброєння, привід, горизонтального, наведення
Формула / Реферат:
Корисна модель відноситься до сільськогосподарського машинобудування, зокрема, зернозбиральних машин.Відомий сепаратор зернового вороху зернозбиральних комбайнів що приводиться в дію ексцентриковим вібратором через шатуни [Зерноуборочные комбайны "Дон" / Ю.А. Песков, И.К. Мещеряков, Ю.Н. Ярмашев и др. - М.: Агропромиздат, 1986. - 333с.].Недоліком такої конструкції є те, що привід відомого сепаратора зернового вороху...
Привід вертикального наведення і стабілізації танкового озброєння
Номер патенту: 60861
Опубліковано: 15.03.2006
Автори: Хандога Анатолій Максимович, Мотуз Георгій Іванович, Положенцев В'ячеслав Васильович, Корсун Валентин Петрович, Старков Юрій Володимирович, Кралін Володимир Всеволодович, Мошнін Віктор Миколайович
МПК: F41G 5/00
Мітки: танкового, наведення, стабілізації, вертикального, привід, озброєння
Формула / Реферат:
Даний винахід належить до нових сполук формули (І), які діють як модулятори рецептора 5НТ2C. Ці сполуки застосовують у фармацевтичних композиціях, застосування яких включає лікування ожиріння. (I)
Пристрій дозволу пострілу артилерійської системи танкового озброєння
Номер патенту: 49984
Опубліковано: 15.10.2002
Автори: Мошнін Віктор Миколайович, Бусяк Юрій Митрофанович, Фролов Леонід Андрійович, Бондаренко Олександр Григорович
МПК: F41G 3/00
Мітки: озброєння, пристрій, дозволу, артилерійської, пострілу, танкового, системі
Формула / Реферат:
Пристрій дозволу пострілу артилерійської системи танкового озброєння, що містить виконавчий елемент і послідовно з'єднані датчик помилки стабілізації гармати, блок формування попередженої координати та пороговий пристрій, який відрізняється тим, що в нього додатково введені послідовно з'єднані другий датчик помилки стабілізації гармати, другий блок формування попередженої координати, вихід якого з'єднаний з другим входом порогового пристрою,...
Протитанкова керована ракета з лазерною системою наведення
Номер патенту: 13286
Опубліковано: 15.03.2006
Автори: Климов Сергій В'ячеславович, Микитюк Олександр Григорович, Жук Сергій Якович
МПК: F41A 27/00
Мітки: протитанкова, лазерною, наведення, керована, ракета, системою
Формула / Реферат:
Протитанкова керована ракета з лазерним наведенням, що містить блок приймача лазерного випромінювання, блок виділення команд керування, блок фільтрів корегування, блок гіроскопічного перетворювача команд, блок підсилювача, блок компенсації, блок стабілізації, блок приводу аеродинамічного керма, блок планера ракети, при цьому вихід блока приймача лазерного випромінювання з'єднаний із входом блока виділення команд керування, вихід блока...
Протитанкова керована ракета з лазерною системою наведення
Номер патенту: 9358
Опубліковано: 15.09.2005
Автори: Микитюк Олександр Григорович, Жук Сергій Якович, Дубровський Євген Миколайович, Слєпов Лев Іванович, Федчук Сергій Володимирович, Климов Сергій В'ячеславович
МПК: F41A 27/00
Мітки: лазерною, ракета, керована, протитанкова, наведення, системою
Формула / Реферат:
Протитанкова керована ракета з лазерним наведенням, що містить блок приймача лазерного випромінювання, блок виділення команд управління, блок фільтрів корегування, блок гіроскопічного перетворювача команд, блок підсилювача, блок компенсації, блок приводу аеродинамічного керма, блок планера ракети, яка відрізняється тим, що до неї додатково запроваджено блок стабілізації, при цьому вихід блока приймача з'єднаний із входом блока виділення...
Попередній патент: Спосіб визначення оптимальної інтенсивної подачі вогнегасної речовини для гасіння твердого горючого матеріалу
Наступний патент: Бункерна естакада доменної печі
Випадковий патент: Спосіб деривації сечі після цистектомії