Спосіб визначення геометричних параметрів об’єкта вимірювань, що рухається
Номер патенту: 106263
Опубліковано: 11.08.2014
Автори: Шаповалова Оксана Олександрівна, Подчашинський Юрій Олександрович
Формула / Реферат
Спосіб визначення геометричних параметрів об'єкта вимірювань, що рухається, який включає формування основного відеозображення об'єкта вимірювань за допомогою оптичної системи та перетворювача "світло-сигнал" пристрою формування відеозображень (ПФВЗ), перетворення цього відеозображення в цифрову форму і введення в цифрову електронну обчислювальну машину (ЕОМ), компенсацію похибки, що виникла внаслідок руху об'єкта вимірювань відносно ПФВЗ, виділення об'єкта вимірювань та визначення його геометричних параметрів шляхом алгоритмічної обробки основного відеозображення об'єкта вимірювань у цифровій ЕОМ, який відрізняється тим, що після введення в цифрову ЕОМ основного відеозображення об'єкта вимірювань формують ряд додаткових його відеозображень, перетворюють їх у цифрову форму і вводять у цифрову ЕОМ, потім виділяють об'єкт вимірювань на основному та додаткових його відеозображеннях шляхом їх алгоритмічної обробки у цифровій ЕОМ і визначають параметри руху об'єкта вимірювань, з урахуванням яких виконують компенсацію похибки, що виникла внаслідок руху об'єкта вимірювань, на основному його відеозображенні для ділянок, що містять контур об'єкта вимірювань, після чого на основному відеозображенні знову виділяють об'єкт вимірювань і остаточно визначають його геометричні параметри.
Текст
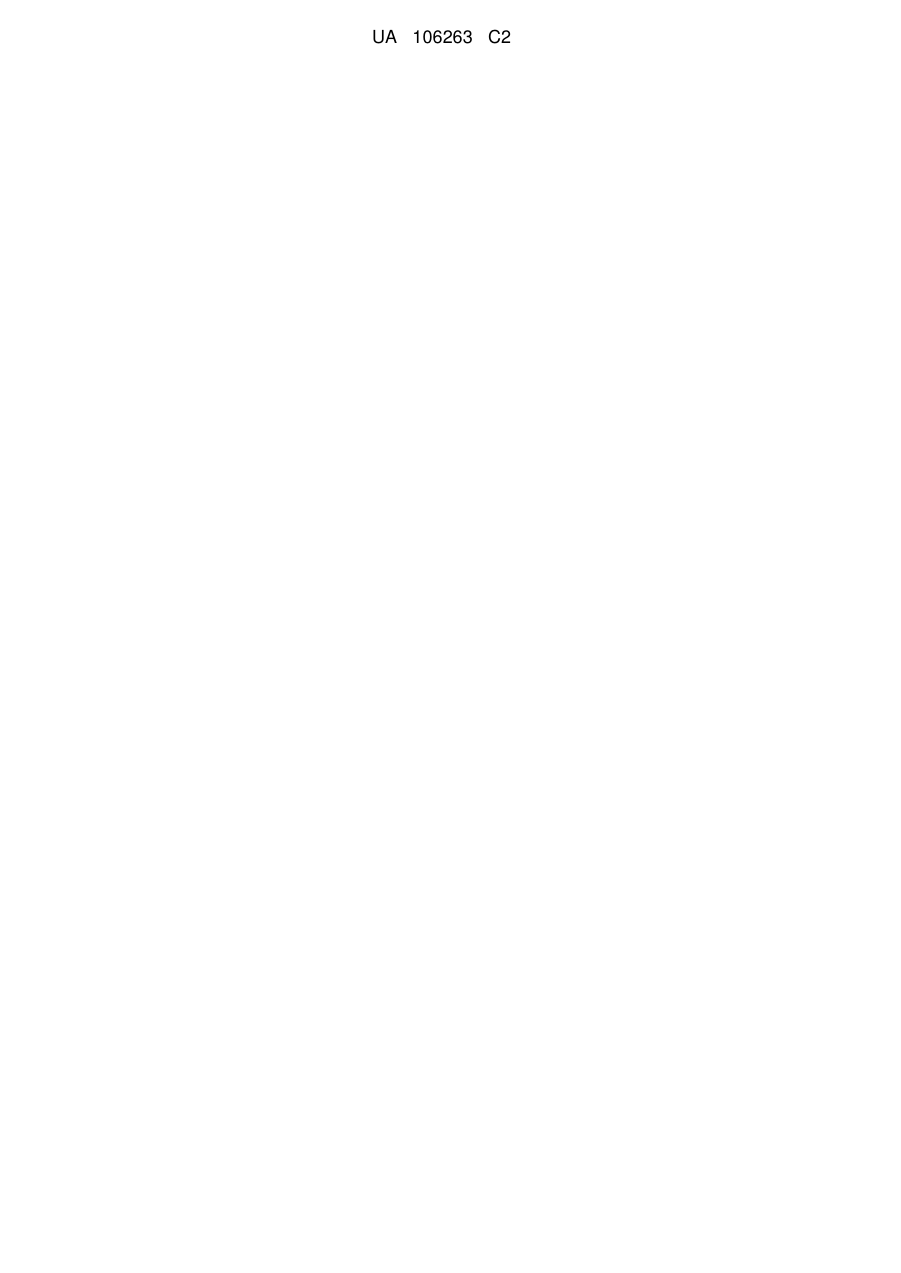
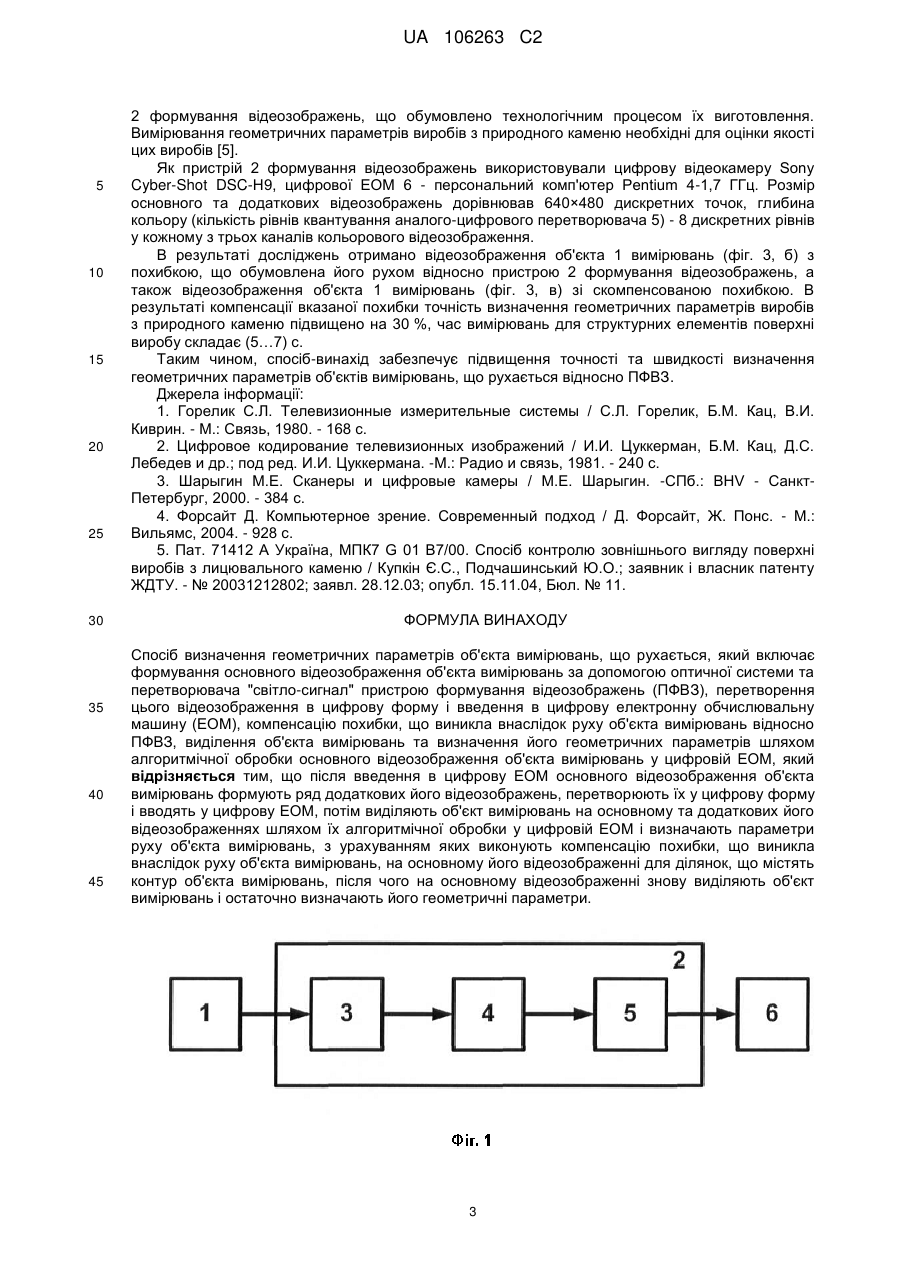
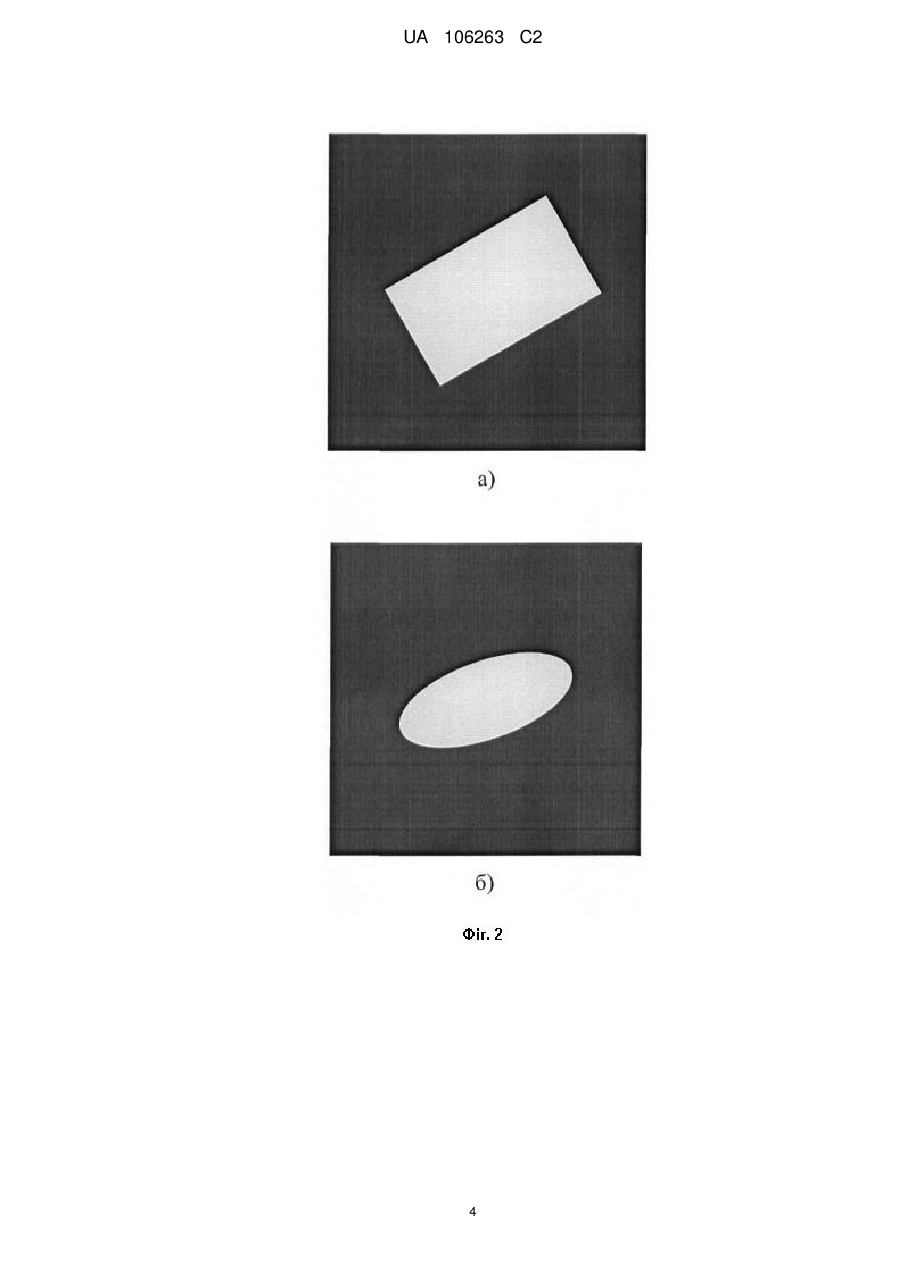
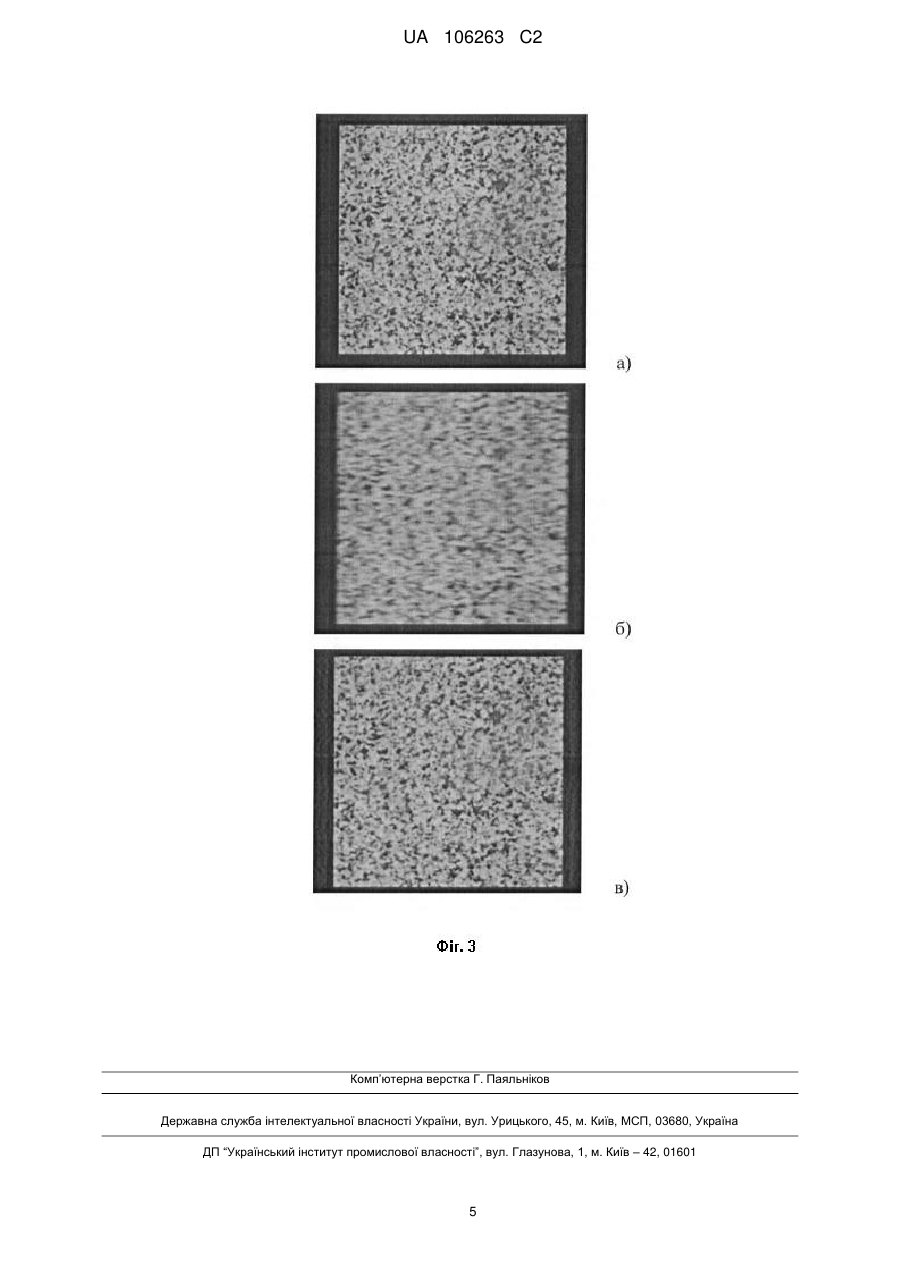
Реферат: Винахід належить до галузі вимірювальної техніки і може бути використаний для підвищення точності і швидкості вимірювань геометричних параметрів різних об'єктів вимірювань, що рухаються. Спосіб визначення геометричних параметрів об'єкта вимірювань, що рухається додатково включає етапи формування ряду додаткових відеозображень об'єкта вимірювань, визначення параметрів руху об'єкта вимірювань шляхом їх алгоритмічної обробки у цифровій ЕОМ, компенсації похибки, що виникає внаслідок руху об'єкта вимірювань відносно ПФВЗ, остаточного визначення геометричних параметрів з урахуванням визначених параметрів руху Технічний результат полягає у підвищенні точності та швидкодії визначення геометричних параметрів об'єкта вимірювань, що рухається. UA 106263 C2 (12) UA 106263 C2 UA 106263 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до галузі вимірювальної техніки і може бути використаний для підвищення точності і швидкості вимірювань геометричних параметрів різних об'єктів вимірювань, що рухаються. Відомий спосіб визначення геометричних параметрів об'єкта вимірювань, що рухається [1, с. 9-12]. Цей спосіб є найбільш близьким за сукупністю суттєвих ознак до винаходу і обрано за прототип винаходу. Як і спосіб-винахід, спосіб-прототип включає формування основного відеозображення об'єкта вимірювань за допомогою оптичної системи та перетворювача "світлосигнал" пристрою формування відеозображень (ПФВЗ), перетворення цього відеозображення в цифрову форму і введення в цифрову електронну обчислювальну машину (ЕОМ), компенсацію похибки, що виникла внаслідок руху об'єкта вимірювань відносно ПФВЗ, виділення об'єкта вимірювань та визначення його геометричних параметрів шляхом алгоритмічної обробки основного відеозображення об'єкта вимірювань у цифровій ЕОМ. Проте, на відміну від способу-винаходу, у способі-прототипі для основного відеозображення об'єкта вимірювань спочатку виконують компенсацію похибки, що виникла внаслідок руху об'єкта вимірювань, а потім виділяють об'єкт вимірювань та визначають його геометричні параметри. Для об'єкта вимірювань, що рухається відносно ПФВЗ, вказана похибка проявляється у розмитті контурів цього об'єкта на відеозображенні у напрямку руху. Цей ефект обумовлено фізичними процесами формування відеозображення у перетворювачі "світлосигнал" ПФВЗ [2, с. 182-187; 3; 4]. При цьому для компенсації вказаної похибки використовують значення параметрів руху (наприклад, швидкості) об'єкта вимірювань, що визначені заздалегідь. Такий підхід не враховує можливі зміни параметрів руху в процесі вимірювань геометричних параметрів, що обумовлені впливом випадкових факторів та нестаціонарними умовами вимірювань. Наслідком цього є неповна компенсація вказаної похибки і низька точність визначення геометричних параметрів об'єкта вимірювань за основним відеозображенням. Крім того, у способі-прототипі компенсацію похибки, що виникла внаслідок руху об'єкта вимірювань відносно ПФВЗ, виконують шляхом алгоритмічної обробки в цифровій ЕОМ всього відеозображення об'єкта вимірювань, оскільки цей об'єкт вимірювань ще не виділено на відеозображенні. Така компенсація похибки є складною і довготривалою процедурою для цифрового відеозображення об'єкта вимірювань, що має великий розмір у дискретних точках. Наслідком цього є низька швидкодія способу-прототипу. Таким чином, спосіб-прототип має низьку точність і швидкодію визначення геометричних параметрів об'єкта вимірювань, що рухається. В основу винаходу поставлена задача удосконалення способу визначення геометричних параметрів об'єкта вимірювань, що рухається, щоб забезпечити підвищення точності та швидкодії визначення геометричних параметрів цього об'єкта. Поставлена задача вирішується таким чином. В спосіб-винахід, що включає формування основного відеозображення об'єкта вимірювань за допомогою оптичної системи та перетворювача "світло-сигнал" пристрою формування відеозображень (ПФВЗ), перетворення цього відеозображення в цифрову форму і введення в цифрову електронну обчислювальну машину (ЕОМ), компенсацію похибки, що виникла внаслідок руху об'єкта вимірювань відносно ПФВЗ, виділення об'єкта вимірювань та визначення його геометричних параметрів шляхом алгоритмічної обробки основного відеозображення об'єкта вимірювань у цифровій ЕОМ, введені нові суттєві ознаки. Згідно з винаходом, після введення в цифрову ЕОМ основного відеозображення об'єкта вимірювань формують ряд додаткових його відеозображень, перетворюють їх у цифрову форму і вводять у цифрову ЕОМ, потім виділяють об'єкт вимірювань на основному та додаткових його відеозображеннях шляхом їх алгоритмічної обробки у цифровій ЕОМ і визначають параметри руху об'єкта вимірювань, з урахуванням яких виконують компенсацію похибки, що виникла внаслідок руху об'єкта вимірювань, на основному його відеозображенні для ділянок, що містять контур об'єкта вимірювань, після чого на основному відеозображенні знову виділяють об'єкт вимірювань і остаточно визначають його геометричні параметри. Підвищення точності визначення геометричних параметрів об'єкта вимірювань, що рухається, забезпечується за рахунок використання додаткових відеозображень цього об'єкта вимірювань для визначення поточних значень його параметрів руху. Отримані значення параметрів руху використовують для компенсації похибки, що обумовлена рухом об'єкта вимірювань відносно ПФВЗ. Оскільки ці значення точно відповідають поточним умовам вимірювань, то спосіб-винахід забезпечує повну компенсацію вказаної похибки на основному відеозображенні об'єкта вимірювань. 1 UA 106263 C2 5 10 15 20 25 30 35 40 45 50 55 60 Після компенсації вказаної похибки на основному відеозображенні повторно виділяють об'єкт вимірювань і визначають його геометричні параметри без впливу вказаної похибки, що повністю скомпенсована. Компенсацію похибки, що обумовлена рухом об'єкта вимірювань відносно ПФВЗ, виконують тільки для ділянок основного відеозображення об'єкта вимірювань, що містять контур цього об'єкта вимірювань. Це є можливим завдяки тому, що об'єкт вимірювань вже виділено при визначенні його параметрів руху. В результаті суттєво скорочується кількість обчислювальних операцій, необхідних для компенсації вказаної похибки, і підвищується швидкодія способувинаходу. При цьому виграш у часі є більшим, ніж затрати часу на формування та попередню обробку декількох десятків додаткових відеозображень об'єкта вимірювань. Таким чином, забезпечується суттєве підвищення точності і швидкодії визначення геометричних параметрів об'єкта вимірювань, що рухається. Перелік креслень, що пояснюють суть способу-винаходу: - фіг. 1 - структурна схема пристрою, що реалізує спосіб-винахід; -фіг. 2, а, б - тестові відеозображення прямокутника та еліпса з випадково обраними геометричними параметрами; -фіг. 3, а, б, в - відеозображення поверхні виробу з граніту Покостівського родовища Житомирської області, для якого використано спосіб-винахід. Спосіб визначення геометричних параметрів об'єкта вимірювань, що рухається, виконують у такій послідовності. 1. Формують основне відеозображення об'єкта вимірювань за допомогою оптичної системи та перетворювача "світло-сигнал" ПФВЗ, перетворюють це відеозображення в цифрову форму і вводять у цифрову ЕОМ. 2. Формують ряд додаткових відеозображень об'єкта вимірювань, перетворюють їх у цифрову форму і вводять у цифрову ЕОМ. В результаті цифрова ЕОМ містить основне та TV додаткових відеозображень об'єкта вимірювань. 3. Виділяють об'єкт вимірювань на основному та додаткових його відеозображеннях шляхом їх алгоритмічної обробки у цифровій ЕОМ і визначають параметри руху об'єкта вимірювань. 4. На основному відеозображенні об'єкта вимірювань для ділянок, що містять контур об'єкта вимірювань, компенсують похибку, що виникла внаслідок руху об'єкта вимірювань відносно ПФВЗ з урахуванням визначених у п. 3 параметрів руху. 5. На основному відеозображенні знову виділяють об'єкт вимірювань і остаточно визначають його геометричні параметри. Для перевірки працездатності способу-винаходу було створено пристрій, що його реалізує (фіг. 1). Вказаний пристрій містить об'єкт 1 вимірювань, пристрій 2 формування відеозображень та цифрову ЕОМ 6. Пристрій 2 формування відеозображень містить оптичну систему 3, перетворювач 4 "світло-сигнал", аналогово-цифровий перетворювач 5. Вхід оптичної системи 3 оптично пов'язаний з об'єктом 1 вимірювань, а її вихід оптично пов'язаний із входом перетворювача 4 "світло-сигнал", вихід якого підключено до входу аналогово-цифрового перетворювача 5, вихід якого підключено до входу цифрової ЕОМ 6. Пристрій для визначення геометричних параметрів об'єкта вимірювань, що рухається, працює таким чином. Пристрій 2 формування відеозображень формує основне відеозображення об'єкта вимірювань. Це відбувається за допомогою оптичної системи 3 та перетворювача 4 "світлосигнал". Далі пристрій 2 формування відеозображень перетворює основне відеозображення об'єкта 1 вимірювань у цифрову форму та вводить це відеозображення в цифрову ЕОМ 6. Після цього пристрій 2 формування відеозображень формує ряд додаткових відеозображень об'єкта 1 вимірювань, перетворює їх у цифрову форму та вводить у цифрову ЕОМ 6. Цифрова ЕОМ 6 виділяє об'єкт 1 вимірювань на основному та додатковому його відеозображеннях і визначає параметри його руху. Далі цифрова ЕОМ 6 на основному відеозображенні об'єкта 1 вимірювань: - компенсує похибку, обумовлену рухом об'єкта 1 вимірювань відносно ПФВЗ; - повторно виділяє об'єкт 1 вимірювань і остаточно визначає його геометричні параметри. За допомогою пристрою для визначення геометричних параметрів об'єкта вимірювань, що рухається, було проведено ряд досліджень. Як об'єкт 1 вимірювань використовували тестові відеозображення прямокутника та еліпса з випадково обраними геометричними параметрами (фіг. 2, а, б), а також відеозображення поверхні виробів з граніту Покостівського родовища Житомирській області (фіг. 3, а). Ці вироби рухаються в процесі вимірювань відносно пристрою 2 UA 106263 C2 5 10 15 20 25 30 35 40 45 2 формування відеозображень, що обумовлено технологічним процесом їх виготовлення. Вимірювання геометричних параметрів виробів з природного каменю необхідні для оцінки якості цих виробів [5]. Як пристрій 2 формування відеозображень використовували цифрову відеокамеру Sony Cyber-Shot DSC-H9, цифрової ЕОМ 6 - персональний комп'ютер Pentium 4-1,7 ГГц. Розмір основного та додаткових відеозображень дорівнював 640×480 дискретних точок, глибина кольору (кількість рівнів квантування аналого-цифрового перетворювача 5) - 8 дискретних рівнів у кожному з трьох каналів кольорового відеозображення. В результаті досліджень отримано відеозображення об'єкта 1 вимірювань (фіг. 3, б) з похибкою, що обумовлена його рухом відносно пристрою 2 формування відеозображень, а також відеозображення об'єкта 1 вимірювань (фіг. 3, в) зі скомпенсованою похибкою. В результаті компенсації вказаної похибки точність визначення геометричних параметрів виробів з природного каменю підвищено на 30 %, час вимірювань для структурних елементів поверхні виробу складає (5…7) с. Таким чином, спосіб-винахід забезпечує підвищення точності та швидкості визначення геометричних параметрів об'єктів вимірювань, що рухається відносно ПФВЗ. Джерела інформації: 1. Горелик С.Л. Телевизионные измерительные системы / С.Л. Горелик, Б.М. Кац, В.И. Киврин. - М.: Связь, 1980. - 168 с. 2. Цифровое кодирование телевизионных изображений / И.И. Цуккерман, Б.М. Кац, Д.С. Лебедев и др.; под ред. И.И. Цуккермана. -М.: Радио и связь, 1981. - 240 с. 3. Шарыгин М.Е. Сканеры и цифровые камеры / М.Е. Шарыгин. -СПб.: BHV - СанктПетербург, 2000. - 384 с. 4. Форсайт Д. Компьютерное зрение. Современный подход / Д. Форсайт, Ж. Понс. - М.: Вильямc, 2004. - 928 с. 5. Пат. 71412 А Україна, МПК7 G 01 В7/00. Спосіб контролю зовнішнього вигляду поверхні виробів з лицювального каменю / Купкін Є.С., Подчашинський Ю.О.; заявник і власник патенту ЖДТУ. - № 20031212802; заявл. 28.12.03; опубл. 15.11.04, Бюл. № 11. ФОРМУЛА ВИНАХОДУ Спосіб визначення геометричних параметрів об'єкта вимірювань, що рухається, який включає формування основного відеозображення об'єкта вимірювань за допомогою оптичної системи та перетворювача "світло-сигнал" пристрою формування відеозображень (ПФВЗ), перетворення цього відеозображення в цифрову форму і введення в цифрову електронну обчислювальну машину (ЕОМ), компенсацію похибки, що виникла внаслідок руху об'єкта вимірювань відносно ПФВЗ, виділення об'єкта вимірювань та визначення його геометричних параметрів шляхом алгоритмічної обробки основного відеозображення об'єкта вимірювань у цифровій ЕОМ, який відрізняється тим, що після введення в цифрову ЕОМ основного відеозображення об'єкта вимірювань формують ряд додаткових його відеозображень, перетворюють їх у цифрову форму і вводять у цифрову ЕОМ, потім виділяють об'єкт вимірювань на основному та додаткових його відеозображеннях шляхом їх алгоритмічної обробки у цифровій ЕОМ і визначають параметри руху об'єкта вимірювань, з урахуванням яких виконують компенсацію похибки, що виникла внаслідок руху об'єкта вимірювань, на основному його відеозображенні для ділянок, що містять контур об'єкта вимірювань, після чого на основному відеозображенні знову виділяють об'єкт вимірювань і остаточно визначають його геометричні параметри. 3 UA 106263 C2 4 UA 106263 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюPodchashynskyi Yurii Oleksandrovych
Автори російськоюПодчашинский Юрий Александрович
МПК / Мітки
МПК: G06F 7/00
Мітки: параметрів, визначення, рухається, геометричних, спосіб, вимірювань, об'єкта
Код посилання
<a href="https://ua.patents.su/7-106263-sposib-viznachennya-geometrichnikh-parametriv-obehkta-vimiryuvan-shho-rukhaehtsya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення геометричних параметрів об’єкта вимірювань, що рухається</a>
Приладова система для вимірювання геометричних параметрів виробів
Номер патенту: 82859
Опубліковано: 27.08.2013
Автор: Подчашинський Юрій Олександрович
МПК: G01B 7/00
Мітки: система, вимірювання, приладова, виробів, геометричних, параметрів
Формула / Реферат:
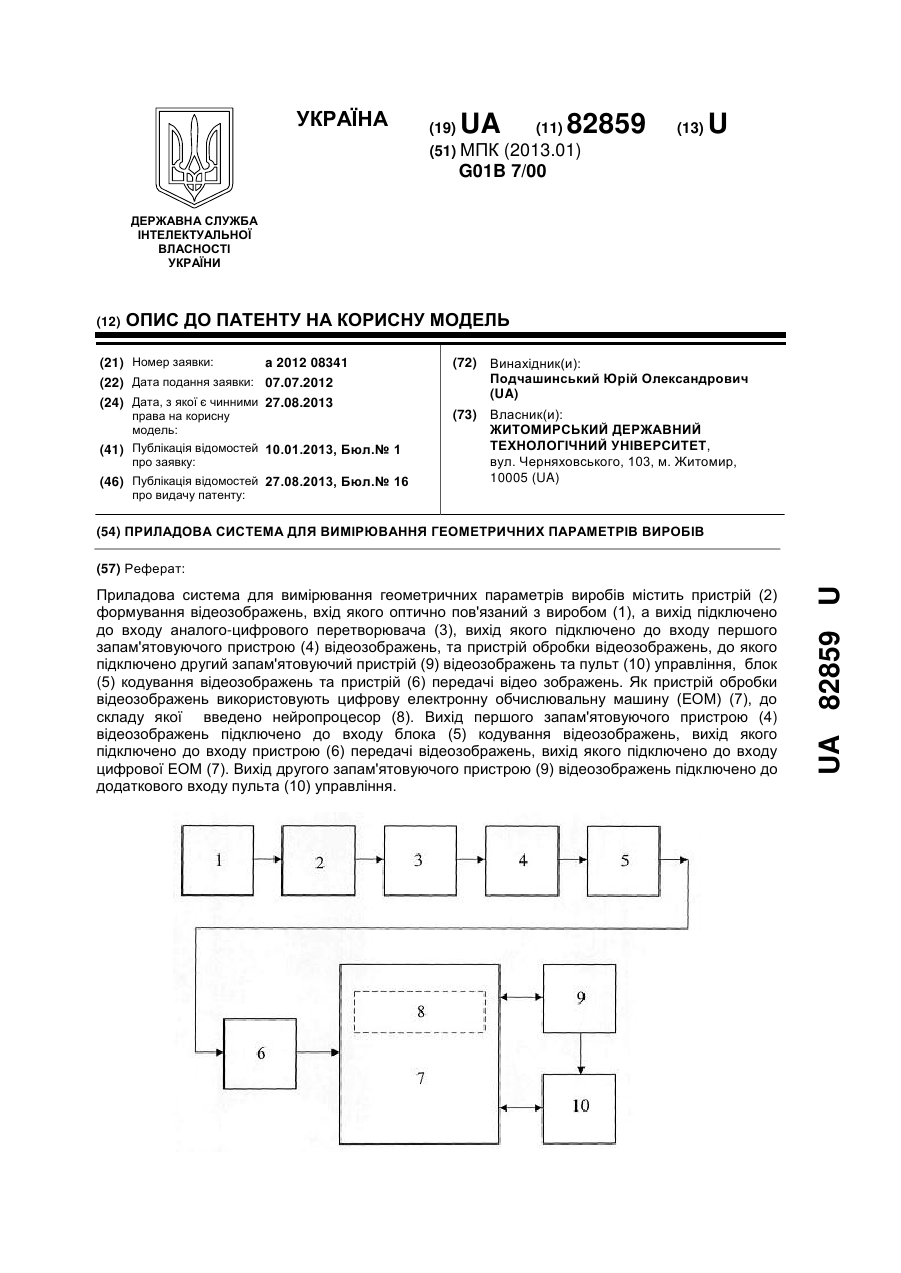
Приладова система для вимірювання геометричних параметрів виробів, що містить пристрій (2) формування відеозображень, вхід якого оптично пов'язаний з виробом (1), а вихід підключено до входу аналого-цифрового перетворювача (3), вихід якого підключено до входу першого запам'ятовуючого пристрою (4) відеозображень, та пристрій обробки відеозображень, до якого підключено другий запам'ятовуючий пристрій (9) відеозображень та пульт (10)...
Спосіб фільтрації відеозображень, що містять вимірювальну інформацію про геометричні параметри об’єктів вимірювань
Номер патенту: 91174
Опубліковано: 25.06.2010
Автор: Подчашинський Юрій Олександрович
Мітки: інформацію, параметри, геометричні, вимірювань, містять, спосіб, об'єктів, фільтрації, вимірювальну, відеозображень
Формула / Реферат:
Спосіб фільтрації відеозображень, що містять вимірювальну інформацію про геометричні параметри об'єктів вимірювань, який включає формування основного відеозображення об'єкта вимірювань за допомогою оптичної системи та перетворювача "світло-сигнал" пристрою формування відеозображень (ПФВЗ), перетворення цього відеозображення в цифрову форму та його введення в цифрову електронну обчислювальну машину (ЕОМ), виключення з основного...
Спосіб визначення геометричних параметрів коронки зуба людини
Номер патенту: 73846
Опубліковано: 15.09.2005
Автори: Аврунін Олег Григорович, Семенець Валерій Васильович, Масловський Олександр Сергійович
МПК: A61C 5/08
Мітки: спосіб, параметрів, людини, коронки, геометричних, зуба, визначення
Формула / Реферат:
Спосіб визначення геометричних параметрів коронки зуба людини, що передбачає закріплення зуба на плато фіксуючого приладу, визначення рівня анатомічної шийки зуба, установку системи координат, який відрізняється тим, що виконують позначення координат мезіальної та дистальної граничних точок шийки зуба, вимірювання пришийкової ширини коронки, пришийкових мезіального та дистального кутів нахилу коронки, мезіальної та дистальної висот коронки,...
Спосіб визначення геометричних параметрів колових підкранових колій
Номер патенту: 50117
Опубліковано: 15.10.2002
Автори: Шпаківський Петро Пилипович, Шевченко Тарас Георгійович, Мороз Олександр Іванович, Черняга Петро Гервазійович, Третяк Корнилій Романович
МПК: G01C 3/00
Мітки: підкранових, спосіб, визначення, геометричних, колій, параметрів, колових
Формула / Реферат:
Спосіб визначення геометричних параметрів колових підкранових колій, який полягає у тому, що позначають вісь колії як середину рейки, вимірюють віддалі між точками осі колії, розташованими рівномірно, визначають за результатами вимірів оптимальний радіус осі колії і відхилення від нього точок осі колії, який відрізняється тим, що вимірювання віддалей між точками здійснюють за допомогою електронного тахеометра, який встановлюють на крані...
Спосіб визначення геометричних параметрів і площі руйнувань дорожніх і аеродромних покриттів
Номер патенту: 91414
Опубліковано: 10.07.2014
Автори: Деркачов Олег Борисович, Гамеляк Ігор Павлович, Попелиш Іван Іванович, Дмитриченко Микола Федорович, Дмитрієв Микола Миколайович
МПК: G01B 3/00
Мітки: дорожніх, визначення, аеродромних, руйнувань, площі, спосіб, покриттів, геометричних, параметрів
Формула / Реферат:
Спосіб визначення геометричних параметрів і площі руйнувань дорожніх і аеродромних покриттів, що передбачає співставлення фотографії поверхні дорожнього покриття та її термограми, який відрізняється тим, що на термограмах в режимі реального часу відображують взаємно перпендикулярні масштабні лінійки.
Попередній патент: Пристрій для перекриття і/або реконструкції місця кісткового дефекту та спосіб виготовлення насадки пристрою перекриття для місця кісткового дефекту
Наступний патент: Гальмова важільна передача візка залізничного транспортного засобу
Випадковий патент: Пристрій для контролю вологості деревини в процесі її сушіння