Пристрій для інформаційного забезпечення процесу контролю завантаження судна насипним або навалочним вантажем
Номер патенту: 106998
Опубліковано: 10.05.2016
Автори: Клименко Євгеній Миколайович, Савчук Віктор Дмитрович
Формула / Реферат
1. Пристрій для інформаційного забезпечення процесу контролю завантаження судна насипним або навалочним вантажем, що містить основний блок з чотирма лазерними підсистемами, який з’єднано з блоком збору і обробки первинної інформації, який в свою чергу з’єднано з комп'ютером з програмним забезпеченням для визначення конфігурації поверхні вантажу та розрахунку об'єму вантажу, який відрізняється тим, що основний блок включає чотири підсистеми лазерних далекомірів, розміщених по кутам комінгсу люку трюму судна, кожна з підсистем оснащена 20-лазерними датчиками-далекомірами, блок розрахунку конфігурації вантажу з’єднано з блоком розрахунку об'єму вантажу, який пов'язаний з блоком даних про розмір трюму та обчислювальним блоком, який з’єднано з блоком зберігання даних та блоком аналізу і оцінки похибки вимірювання, що з’єднано з блоком даних про швидкість завантаження трюму, дисплеєм та блоком вантажної програми судна.
2. Пристрій за п. 1, який відрізняється тим, що у кожній лазерній підсистемі датчики-далекоміри встановлені так, що промені далекомірів мають напрями в горизонтальній та вертикальній площинах від 0° до 90°.
Текст
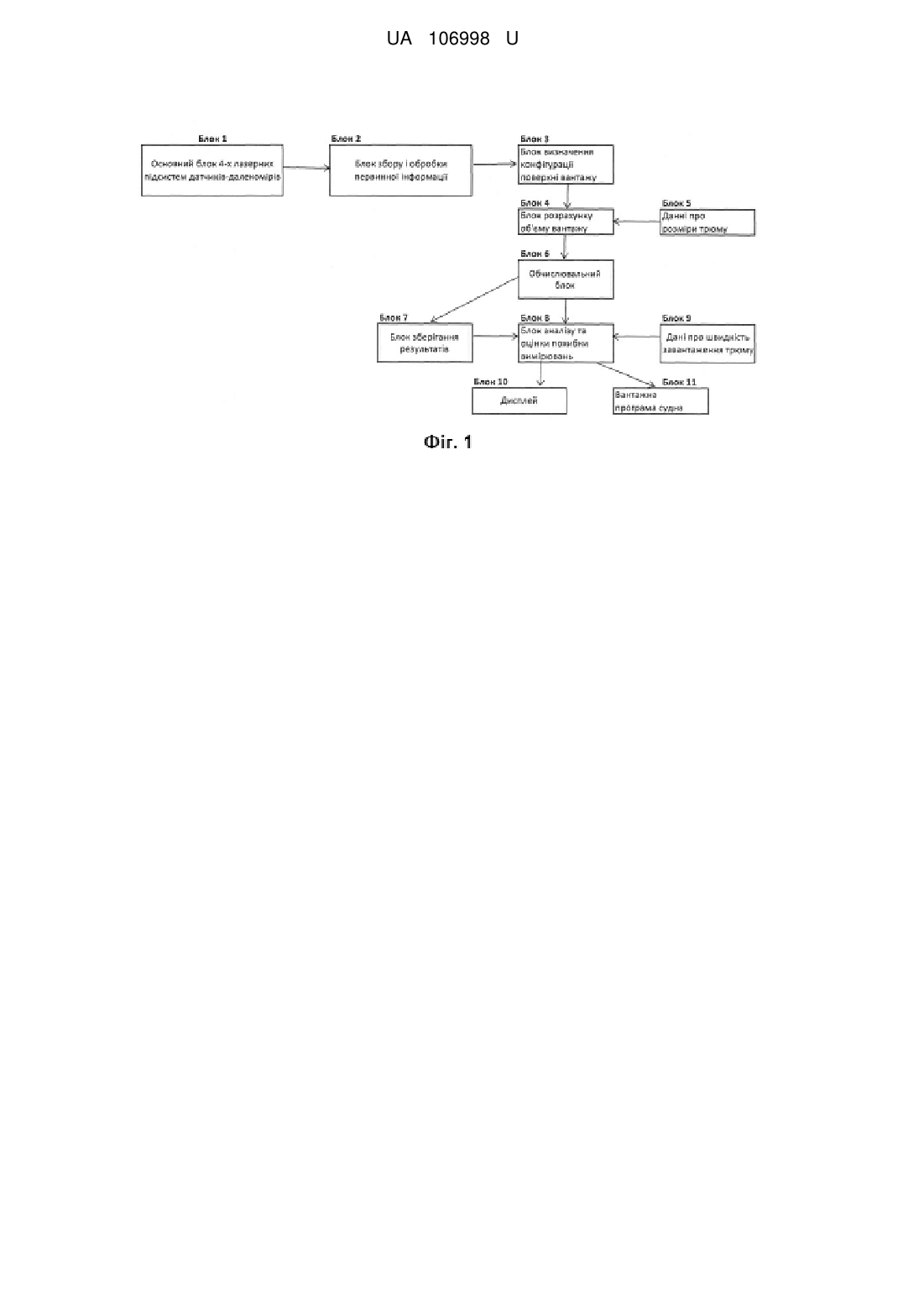
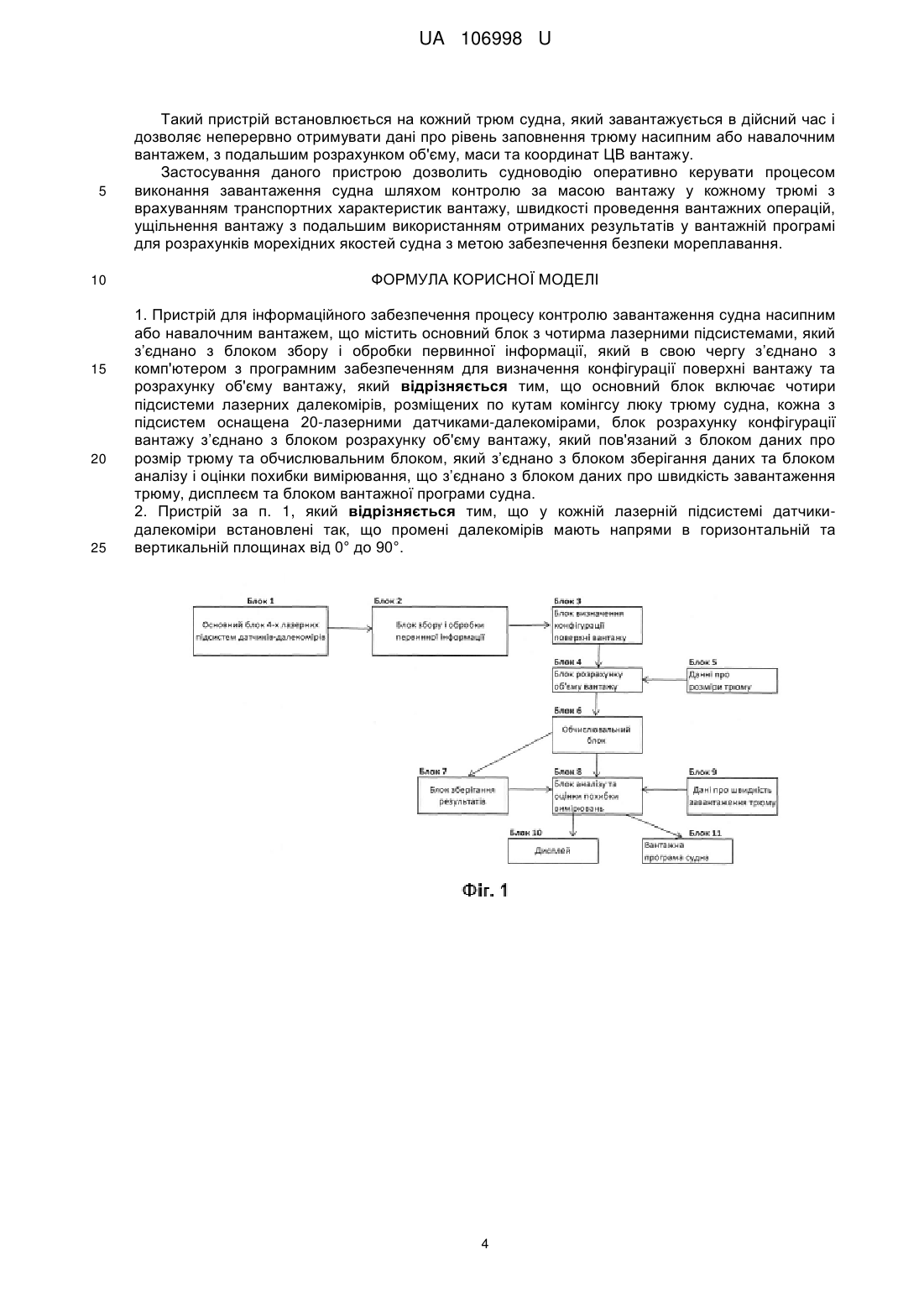
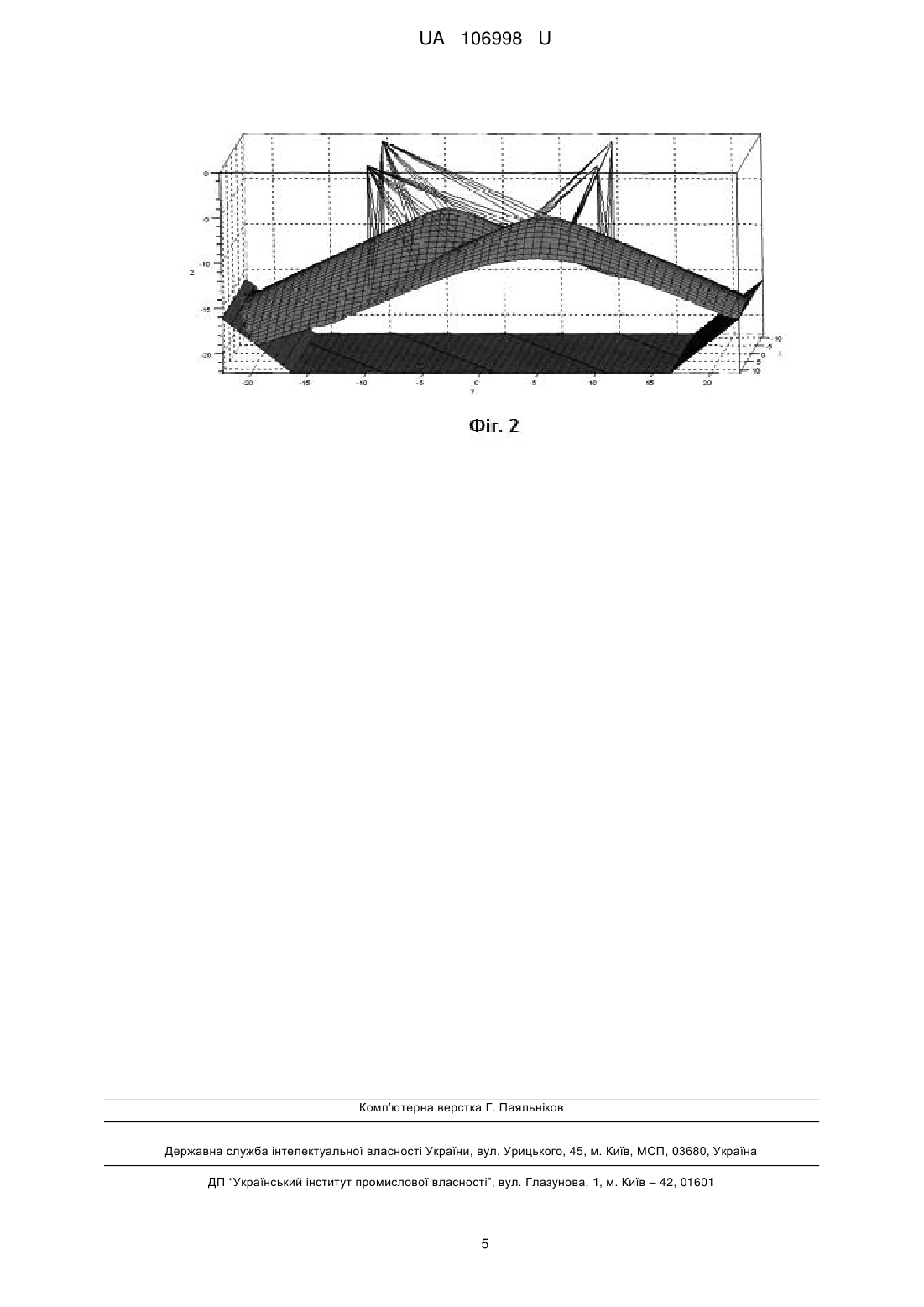
Реферат: Пристрій для інформаційного забезпечення процесу контролю завантаження судна насипним або навалочним вантажем містить основний блок з чотирма лазерними підсистемами, який з’єднано з блоком збору і обробки первинної інформації, який в свою чергу з’єднано з комп'ютером з програмним забезпеченням для визначення конфігурації поверхні вантажу та розрахунку об'єму вантажу. Основний блок містить чотири підсистеми лазерних далекомірів, розміщених по кутам комінгсу люку трюму судна, кожна з підсистем оснащена 20 лазерними датчиками-далекомірами, блок розрахунку конфігурації вантажу з’єднано з блоком розрахунку об'єму вантажу, який пов'язаний з блоком даних про розмір трюму та обчислювальним блоком, який з’єднано з блоком зберігання даних та блоком аналізу і оцінки похибки вимірювання, що з’єднано з блоком даних про швидкість завантаження трюму, дисплеєм та блоком вантажної програми судна UA 106998 U (12) UA 106998 U UA 106998 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до контрольно-вимірювальної техніки, зокрема до пристроїв інформаційного забезпечення судноводіїв даними про стан завантаження кожного трюму та судна у цілому на будь-який час виконання вантажних операцій для подальшого розрахунку морехідних якостей судна, що сприяє забезпеченню безпеки мореплавання. Відомий пристрій для вимірювання рівня сипучих або рідинних матеріалів [Патент РФ № 2279642, приор. 05.04.2002, опубл. 10.07.2006, МПК 9 G01F 23/292], що включає пристрій підсвічування і телекамеру, що закріплені над поверхнею матеріалу, що вимірюють, канал передачі сигналу, цифровий обчислювальний пристрій і пристрій відображення результатів вимірів. Телекамеру встановлюють так, щоб в крайніх положеннях вимірюваного середовища границя розділу трьох середовищ (рідина, стінка, повітря) попадали до кута зору телекамери. Відображення поверхні середовища, що контролюють, та первинної шкали вводиться за допомогою телекамери в цифровий обчислювальній пристрій, де формується файл відображення у вигляді матриці пікселів. Недоліком пристрою є те, що використання телекамери для визначення максимального рівня середовища, що контролюється, обмежується кутом зору телекамери і залежить від кута огляду телекамери. Крім цього, під час використання телекамери при виконанні вантажних операцій в трюмі судна вона буде забруднюватися вантажним пилом, а також буде заважати засобам, які використовуються в порту для виконання завантаження судна. Відомий пристрій контролю рівня текучого середовища, що знаходиться у резервуарі, що транспортується або сипких вантажів [Патент на ПМ РФ № 114778, приор. 19.12.2011, опубл. 10.04.2012, МПК G01F 23/00], що включає блок первинних перетворювачів, розміщених у верхній частині конструкції резервуара, бортовий блок обробки та аналізу даних. Блок первинних перетворювачів містить щонайменше один електроакустичний перетворювач, що забезпечує періодичне формування зондуючих ультразвукових хвиль. Недоліками даного пристрою є використання ультразвукових хвиль для зондування з наступним прийманням хвиль, що відбиті від поверхні текучого середовища або сипкого вантажу, збільшує похибку вимірювань за рахунок обліку в розрахунках часу приймання електроакустичним перетворювачем хвилі, що відображується від поверхні. Крім цього, результати вимірювань безпосередньо залежать від неоднорідності поверхні сипкого вантажу, що також не забезпечує точність результатів розрахунку маси вантажу. Найближчим аналогом до заявленого пристрою є пристрій "Программно-аппаратный комплекс измерения объёмов насыпных материалов на закрытых складах ПАК-ИО) [Ресурс Internet http://www.prinspb.sp.ru/3d-easvblog.asp]. Даний пристрій містить основний блок с двома лазерними підсистемами: лазерний сканер, розміщений з можливістю обертання навколо горизонтальної осі, для сканування точки поверхні матеріалу на складі і вимірювати відстань і кут, фіксуючи таким чином полярні координати кожної і лазерний далекомір, що вимірює по мірі руху основного блока над поверхнею, послідовність відстаней до далекої стіни складу (чи щита, якщо там немає стіни), систему управління і живлення, блок збору і обробки первинної інформації з'єднано з комп'ютером і системою зв'язку Wi-Fi, комп'ютер забезпечений програмним забезпеченням прийому і обробки інформації від основного блока для розрахунку об'єму насипного матеріалу, на який проводиться вимір. Кожен профіль, збережений в пам'яті приладу і переданий в комп'ютер, будучи таким, що є інтегрованим по повздовжній відстані від лазерного далекоміра, дає комп'ютеру поверхню матеріалу, об'єм якого в реальному часі розраховує комп'ютер. Недоліками даного пристрою є використання механічних повздовжніх переміщень основного блока з лазерними підсистемами, який закріплюють на мостовому крані, що унеможливлює його використання для постійного оперативного контролю об'єму вантажу. В основу корисної моделі поставлена задача створення пристрою для інформаційного забезпечення процесу контролю завантаження судна насипним або навалочним вантажем шляхом удосконалення системи первинної обробки та введенням додаткових блоків розрахунку об'єму, маси вантажу та координат центра ваги (ЦВ) з врахуванням транспортних характеристик вантажу, забезпечується висока точність результатів розрахунку маси вантажу, оперативне керування процесом виконання завантаження судна насипним або навалочним вантажем для подальших розрахунків морехідних якостей судна. Поставлена задача вирішується тим, що у пристрої інформаційного забезпечення процесу контролю завантаження, що містить основний блок з 4-х лазерних підсистем, з'єднано з блоком збору і обробки первинної інформації, комп'ютером з програмним забезпеченням для визначення конфігурації поверхні вантажу та розрахунку об'єму вантажу, згідно з корисної моделлю, основний блок містить чотири лазерні підсистеми, що розміщені по кутам комінгсу люку трюму судна, блок розрахунку конфігурації вантажу з'єднано з блоком розрахунку об'єму 1 UA 106998 U 5 10 15 20 25 30 35 40 45 вантажу, який пов'язаний з блоком даних про розміри трюму та обчислювальним блоком для розрахунку маси та координат ЦВ вантажу, який з'єднано з блоком зберігання даних і блоком аналізу та оцінки похибки вимірювання, що з'єднано з блоком даних про швидкість завантаження трюму, дисплеєм та блоком вантажної програми судна. Причинно-наслідковий зв'язок між сукупністю ознак, що заявляються, та технічним результатом полягає в наступному. Основний блок складається з чотирьох підсистем лазерних далекомірів, що розміщені по кутам комінгсу люку трюму судна. У кожній лазерній підсистемі міститься 20 датчиківдалекомірів, які встановлені так, що промені далекомірів мають напрями в горизонтальній та вертикальній площинах від 0° до 90°. Це забезпечує синхронне вимірювання відстані від кутів комінгсу люку до поверхні вантажу, при цьому зміна напрямів променів лазерних далекомірів та вимірювання відстані виконується через проміжок часу, який задається оператором (судноводієм) в залежності від інтенсивності виконання вантажних операцій. Це сприяє динамічному розрахунку координат виміряних точок на поверхні вантажу для найбільш точного опису поверхні насипного вантажу. По заданій команді оператора (судноводія), або по заданій програмі, включаються лазерні далекоміри, промені яких мають напрями від 0° до 90°. Першим включається далекомір, промінь якого спрямований вертикально вниз - 0°, потім послідовно далекоміри з напрямами променів 10°, 20°, 30° і так далі аж поки промінь перестає попадати на поверхню вантажу. Кут у 90° може бути, коли поверхня вантажу буде майже досягати комінгсу люку. Ця ж система аналогічно включає далекоміри з горизонтальними напрямами променів від 0° до 90°, тобто перший промінь направляється паралельно стінці комінгса люку (борту судна) - 0°, потім включаються далекоміри, промені яких мають напрями 10°, 20°, 30° і так далі аж поки промінь не попадає на поперечну переборку трюму (кут = 90°). Це дозволяє безперервно отримувати дані про рівень заповнення трюму насипним або навалочним вантажем, з подальшим розрахунком його об'єму, маси та координат ЦВ (Дивись фіг. 2). Застосування блока даних про розмір трюму забезпечує визначення об'єму вантажу з урахуванням даних по характеристиках (розмірах) кожного конкретного трюму. Застосуванням обчислювального блока забезпечується розрахунок маси вантажу, який завантажено в трюм з врахуванням його ущільнення в залежності від висоти насипання вантажу та висоти штабеля вантажу в трюмі. У цьому блоці також розраховуються координати ЦВ вантажу, який в даний час завантажено в трюм. Це забезпечує оперативне керування процесом завантаження судна насипним або навалочним вантажем та дає можливість використовувати отримані результати для розрахунку морехідних якостей судна і забезпечення безпеки мореплавання. Застосування блока даних попереднього розрахунку і блока аналізу та оцінки похибки вимірювання забезпечує порівнювання нових даних з попередніми, визначає збільшення маси вантажу в залежності від даних, отриманих з блока про швидкість завантаження трюму і забезпечує судноводіїв даними про стан завантаження кожного трюму та судна у цілому на будь-який час виконання вантажних операцій, для подальшого розрахунку морехідних якостей судна перед виходом в рейс. Принцип дії системи по контролю завантаження судна насипним або навалочним вантажем засновано на тому, що поверхня такого вантажу розглядається в системі координат, початок якої розташовано в центрі симетрії, а вісь Oz направлена вертикально вверх. Зона висипання вантажу представлена областю у вигляді конуса зі згладженою реальною вершиною, а його поверхня - у формі, яку можна описати рівнянням двополосного гіперболоїда обертання: x2 y2 z2 1 . (1) a2 a2 b2 При зміщені центру симетрії в точку М1 (x1; y1; z1) рівняння (1) приймає вид: ( x x 1 ) 2 ( y y 1 ) 2 ( z z1 )2 1. (2) a2 a2 b2 50 55 У зв'язку з тим, що в процесі завантаження трюма точка висипання вантажу дискретно зміщується, кінцева поверхня штабеля вантажу описана вже декількома такими конусами (фіг. 2). В загальному випадку, при неперервному зміщені точки висипання вантажу, рівняння поверхні має вигляд: z max z( V ) k( V ) ( x x v ) 2 ( y y v ) 2 (a( V )) 2 , (3) VD 2 UA 106998 U 5 10 де D - проекція зони висипання на горизонтальну площину; V - точки цієї області з координатами (xv; yv); z(V), k(V), a(V) - скалярні функції точки V, параметр k дорівнює тангенсу кута природного укосу вантажу, параметр а дорівнює відстані від верхньої точки такого "згладженого конуса" до його центра симетрії М1 [хх; ух; z1). Для будь-якої точки M(x; y; z) такої поверхні кут γ(х; у) між дотичною площиною і горизонтальною площиною хОу не може перевищувати максимального кута природного укосу m насипного вантажу. Напрямок проміння далекоміра визначається двома кутами і . Де - кут між проекцією проміння ОМyz на координатну площину yOz та негативним напрямом осі Oz; - кут між проекцією ОМxz проміння на координатну площину xOz і негативним напрямом осі Oz. Виміряна відстань дорівнює , а координати точки на поверхні розраховуються по формулам: x* ~ x y* ~ y z* ~ z 15 20 25 30 35 40 45 tg tg2 tg2 1 tg tg tg2 1 . (4) 2 tg tg2 tg2 1 Форму поверхні вантажу пропонується визначати методом Нелдера-Міда (конусів), мінімізуючи суму квадратів відхилення. Щоб приближення виконати більш точним, а трикутники кінцевого кусково-лінійного графіка не відрізнялись від реальної поверхні, як вихіднаприйнята тріангуляція Делоне. Суть корисної моделі пояснюється кресленнями. На фіг. 1 зображена блок-схема пристрою для інформаційного забезпечення контролю завантаження судна насипним або навалочним вантажем, на фіг. 2 представлена схема напрямів променів лазерних далекомірів. Пристрій для інформаційного забезпечення контролю завантаження судна насипним або навалочним вантажем містить основний блок з чотирма лазерними підсистемами датчиківдалекомірів 1, що розміщені по кутам комінгсу люку трюму судна, кожна з яких оснащена 20 датчиками-далекомірами, блок збору і обробки первинної інформації 2, блок визначення конфігурації поверхні вантажу 3, блок розрахунку об'єму вантажу 4, блок даних про розміри трюмів 5, обчислювальний блок 6, блок зберігання результатів 7, блок аналізу і оцінки похибки вимірювань 8, блок даних про швидкість завантаження трюму 9, дисплей 10 та блок вантажної програми судна 11. Пристрій працює таким чином. Інформація з 4-х лазерних підсистем датчиків-далекомірів основного блока 1 передається на блок обробки первинної інформації 2, у якому виконуються розрахунки координат виміряних точок на поверхні вантажу. Координати точок на поверхні вантажу передаються на блок визначення конфігурації поверхні вантажу 3, у якому визначається (вибирається) рівняння, що найбільш точно описує поверхню насипного вантажу. По рівнянню, яке описує поверхню вантажу, а також використовуючи блок даних по характеристиках (розмірах) кожного конкретного трюму 5 в блоці розрахунку об'єму вантажу 4 визначається його об'єм. Далі дані про об'єм вантажу передаються на обчислювальний блок 6 для розрахунку маси вантажу, який завантажено в трюм з врахуванням його ущільнення в залежності від висоти насипання вантажу та висоти штабеля вантажу в трюмі. У цьому блоці також розраховуються координати ЦВ штабелю вантажу, який на даний час завантажено в трюм. Результати розрахунків передаються на блок зберігання даних 7 та блок аналізу і оцінки похибки вимірювань 8. До блока 8 з блока 9 також надходять дані про швидкість завантаження трюму. Блок аналізу і оцінки похибки вимірювань 8 порівнює нові дані з попередніми та плюсує (додає) збільшення маси вантажу в залежності від швидкості завантаження кожного трюму. Після аналізу та усереднення отриманих даних, вони подаються на дисплей 10 та, як вхідні дані, у вантажну програму судна 11 для використання при розрахунках морехідних якостей завантаженого судна. 3 UA 106998 U 5 10 15 20 25 Такий пристрій встановлюється на кожний трюм судна, який завантажується в дійсний час і дозволяє неперервно отримувати дані про рівень заповнення трюму насипним або навалочним вантажем, з подальшим розрахунком об'єму, маси та координат ЦВ вантажу. Застосування даного пристрою дозволить судноводію оперативно керувати процесом виконання завантаження судна шляхом контролю за масою вантажу у кожному трюмі з врахуванням транспортних характеристик вантажу, швидкості проведення вантажних операцій, ущільнення вантажу з подальшим використанням отриманих результатів у вантажній програмі для розрахунків морехідних якостей судна з метою забезпечення безпеки мореплавання. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Пристрій для інформаційного забезпечення процесу контролю завантаження судна насипним або навалочним вантажем, що містить основний блок з чотирма лазерними підсистемами, який з’єднано з блоком збору і обробки первинної інформації, який в свою чергу з’єднано з комп'ютером з програмним забезпеченням для визначення конфігурації поверхні вантажу та розрахунку об'єму вантажу, який відрізняється тим, що основний блок включає чотири підсистеми лазерних далекомірів, розміщених по кутам комінгсу люку трюму судна, кожна з підсистем оснащена 20-лазерними датчиками-далекомірами, блок розрахунку конфігурації вантажу з’єднано з блоком розрахунку об'єму вантажу, який пов'язаний з блоком даних про розмір трюму та обчислювальним блоком, який з’єднано з блоком зберігання даних та блоком аналізу і оцінки похибки вимірювання, що з’єднано з блоком даних про швидкість завантаження трюму, дисплеєм та блоком вантажної програми судна. 2. Пристрій за п. 1, який відрізняється тим, що у кожній лазерній підсистемі датчикидалекоміри встановлені так, що промені далекомірів мають напрями в горизонтальній та вертикальній площинах від 0° до 90°. 4 UA 106998 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюThe device for providing information to control the process of loading the vessel with bulk load or bulk cargo
Автори англійськоюKlymenko Yevhenii Mykolaiovych, Savchuk Viktor Dmytrovych
Назва патенту російськоюУстройство для информационного обеспечения процесса контроля загрузки судна насыпным или навалочным грузом
Автори російськоюКлименко Евгений Николаевич, Савчук Виктор Дмитриевич
МПК / Мітки
МПК: G01F 23/292, G01C 3/00
Мітки: насипним, навалочним, процесу, вантажем, інформаційного, забезпечення, судна, контролю, пристрій, завантаження
Код посилання
<a href="https://ua.patents.su/7-106998-pristrijj-dlya-informacijjnogo-zabezpechennya-procesu-kontrolyu-zavantazhennya-sudna-nasipnim-abo-navalochnim-vantazhem.html" target="_blank" rel="follow" title="База патентів України">Пристрій для інформаційного забезпечення процесу контролю завантаження судна насипним або навалочним вантажем</a>
Пристрій для інформаційного забезпечення процесу контролю завантаження судна насипним вантажем

Номер патенту: 98070
Опубліковано: 10.04.2015
Автори: Клименко Євгеній Миколайович, Савчук Віктор Дмитрович
МПК: G01F 23/292
Мітки: інформаційного, процесу, завантаження, забезпечення, вантажем, пристрій, контролю, судна, насипним
Пристрій для інформаційного забезпечення лоцманської проводки морського судна
Номер патенту: 78679
Опубліковано: 25.03.2013
Автори: Соколенко Василь Іннокентійович, Ворохобін Ігор Ігорович, Голіков Володимир Володимирович, Мальцев Анатолій Сідорович
МПК: B63B 49/00, G08G 3/00
Мітки: пристрій, забезпечення, інформаційного, морського, проводки, судна, лоцманської
Формула / Реферат:
Пристрій для інформаційного забезпечення лоцманської проводки морського судна, що містить систему первинної обробки, яка включає блок координат шляхових точок та блок визначення координат антени приймача, зв'язані з блоком перерахунку координат на центр ваги, зв'язаний з блоком розрахунку характеристик повороткості, який в свою чергу зв'язаний з блоком розрахунку координат траєкторних точок прямолінійних і криволінійних траєкторій, система...
Пристрій для інформаційного забезпечення процесу керування судном під час маневрування
Номер патенту: 91006
Опубліковано: 25.06.2014
Автори: Мальцев Станіслав Едуардович, Голіков Володимир Володимирович
МПК: G08G 3/00
Мітки: забезпечення, маневрування, процесу, інформаційного, керування, судном, пристрій
Формула / Реферат:
Пристрій для інформаційного забезпечення процесу керування судном під час маневрування, що містить систему первинної обробки, яка містить блок вхідних даних, зв'язану з системою вторинної обробки, яка містить електронну обчислювальну машину і сполучена з індикатором, який містить дисплей, блок органів керування, який відрізняється тим, що система первинної обробки інформації має блок вводу параметрів плеча і вектора зовнішніх і внутрішніх...
Пристрій для інформаційного забезпечення процесу управління судном
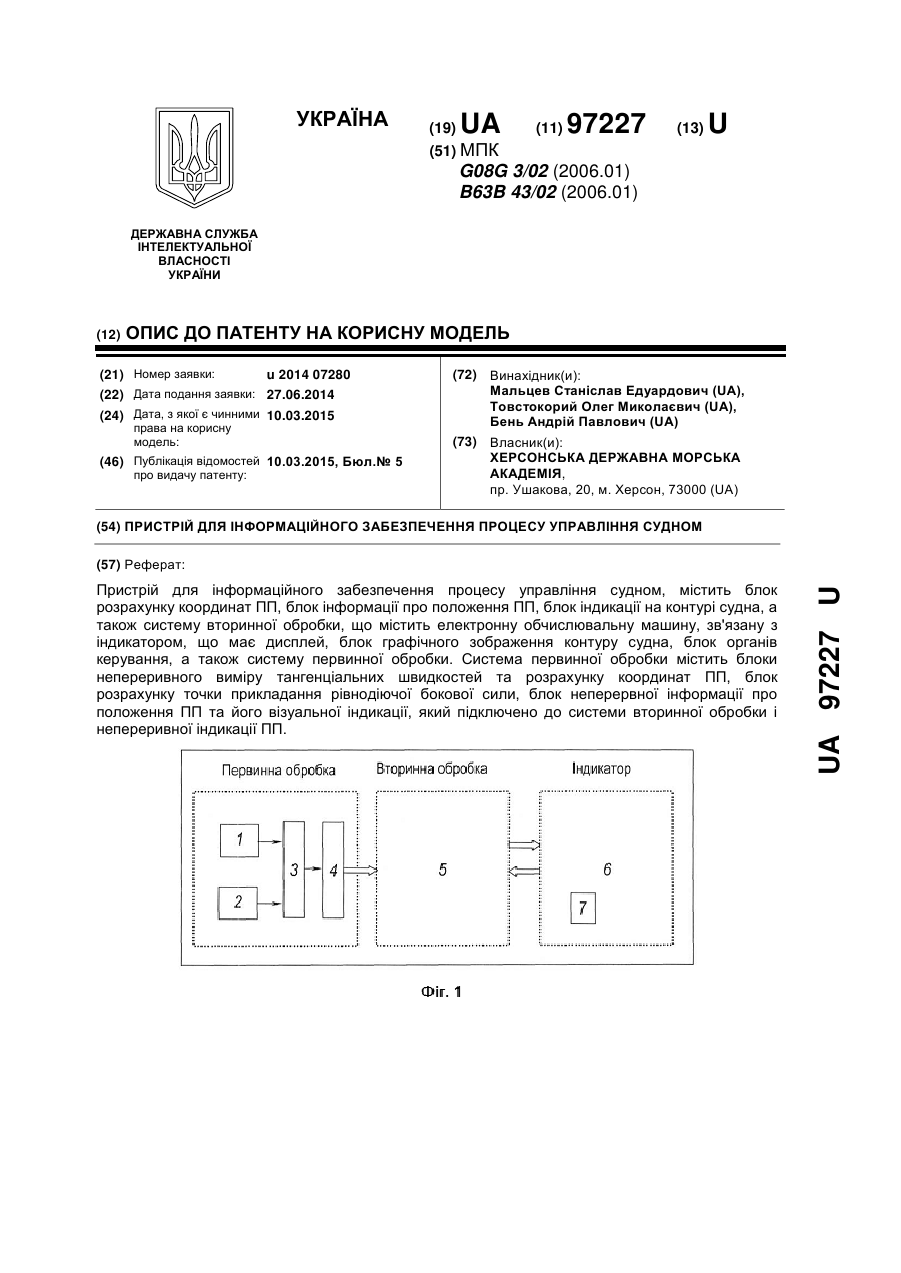
Номер патенту: 97227
Опубліковано: 10.03.2015
Автори: Мальцев Станіслав Едуардович, Товстокорий Олег Миколаєвич, Бень Андрій Павлович
МПК: G08G 3/00
Мітки: процесу, пристрій, судном, управління, забезпечення, інформаційного
Формула / Реферат:
Пристрій для інформаційного забезпечення процесу управління судном, що містить блок розрахунку координат ПП, блок інформації про положення ПП, блок індикації на контурі судна, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення контуру судна, блок органів керування, а також систему первинної обробки, яка відрізняється тим, що система первинної...
Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення
Номер патенту: 89389
Опубліковано: 25.04.2014
Автори: Голіков Володимир Володимирович, Мамонтов Володимир Володимирович, Сафін Ігор Вікторович, Мальцев Анатолій Сідорович
МПК: G08G 3/00
Мітки: інформаційного, управління, небезпечного, надмірного, процесу, забезпечення, судном, наближення, пристрій
Формула / Реферат:
Пристрій для інформаційного забезпечення процесу управління судном під час надмірного та небезпечного наближення, що включає систему первинної обробки, систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок органів керування, який відрізняється тим, що система первинної обробки містить блок даних про координати суден, що спостерігаються, блок розрахунку відстані від власного судна...
Попередній патент: Спосіб вимірювання вертикальної міграції головки стегнової кістки
Наступний патент: Двоімпульсний пневматичний регулятор частоти обертання дизельного двигуна
Випадковий патент: Обертова піч