Спосіб лінеаризації характеристики перетворення вимірювачів фізичних величин з частотними автогенераторними датчиками
Формула / Реферат
Спосіб отримання лінійної характеристики перетворення вимірювачів фізичних величин з частотними автогенераторними датчиками, що базується на перетворенні вихідного сигналу частотного датчика, що нелінійно залежить від вимірювальної величини, в лінійно залежне від вимірювальної величини число імпульсів, який відрізняється тим, що перший вихідний сигнал частотного датчика формують під дією вимірювальної величини ![]() за допомогою вимірювального генератора та встановлюють таким, що дорівнює
за допомогою вимірювального генератора та встановлюють таким, що дорівнює ![]() , при виконанні умови
, при виконанні умови ![]() або
або ![]() , при виконанні умови
, при виконанні умови ![]() , де
, де ![]() - значення вихідних сигналів датчика при відсутності на вході вимірювальної величини,
- значення вихідних сигналів датчика при відсутності на вході вимірювальної величини, ![]() - показник ступеня, що залежить від виду частотозадавального елемента датчика, а другий вихідний сигнал частотного датчика формують за допомогою опорного генератора та встановлюють таким, що дорівнює
- показник ступеня, що залежить від виду частотозадавального елемента датчика, а другий вихідний сигнал частотного датчика формують за допомогою опорного генератора та встановлюють таким, що дорівнює ![]() , подають на перший та другий частотні входи мікроконтролера, де формують інтервали часу
, подають на перший та другий частотні входи мікроконтролера, де формують інтервали часу ![]() та
та ![]() , який заповнюють імпульсами з частотою
, який заповнюють імпульсами з частотою ![]() , отриманою від опорного генератора, та частотою
, отриманою від опорного генератора, та частотою ![]() , отриманою від вимірювального генератора, відповідно, при виконанні умови
, отриманою від вимірювального генератора, відповідно, при виконанні умови ![]() , або імпульсами з частотами
, або імпульсами з частотами ![]() та
та ![]() , відповідно, при виконанні умови
, відповідно, при виконанні умови ![]() до досягнення заздалегідь встановленого в пам'яті мікроконтролера числа
до досягнення заздалегідь встановленого в пам'яті мікроконтролера числа ![]() , які зберігають у пам'яті мікроконтролера, далі за сформований інтервал часу
, які зберігають у пам'яті мікроконтролера, далі за сформований інтервал часу ![]() підраховують кількість імпульсів
підраховують кількість імпульсів ![]() , що надходять на вхід 1 мікроконтролера з частотою
, що надходять на вхід 1 мікроконтролера з частотою ![]() , при виконанні умови
, при виконанні умови ![]() , або кількість імпульсів
, або кількість імпульсів ![]() , що надходять на вхід 1 мікроконтролера з частотою
, що надходять на вхід 1 мікроконтролера з частотою ![]() , при виконанні умови
, при виконанні умови ![]() , число імпульсів
, число імпульсів ![]() або
або ![]() зберігають у пам'яті мікроконтролера, після чого формують часовий інтервал
зберігають у пам'яті мікроконтролера, після чого формують часовий інтервал ![]() , який заповнюють імпульсами з частотою
, який заповнюють імпульсами з частотою ![]() до досягнення збереженого у пам'яті мікроконтролера значення
до досягнення збереженого у пам'яті мікроконтролера значення ![]() , при виконанні умови
, при виконанні умови ![]() , або імпульсами з частотою
, або імпульсами з частотою ![]() , при виконанні умови
, при виконанні умови ![]() до досягнення збереженого у пам'яті мікроконтролера значення
до досягнення збереженого у пам'яті мікроконтролера значення ![]() , часовий інтервал
, часовий інтервал ![]() або
або ![]() зберігають у пам'яті мікроконтролера, послідовно формують часові імпульси та числа імпульсів, поки не буде досягнуто число імпульсів, що дорівнює
зберігають у пам'яті мікроконтролера, послідовно формують часові імпульси та числа імпульсів, поки не буде досягнуто число імпульсів, що дорівнює ![]() при умові
при умові ![]() або
або ![]() , при умови
, при умови ![]() , після чого за допомогою блока обчислення мікроконтролера формують число імпульсів
, після чого за допомогою блока обчислення мікроконтролера формують число імпульсів ![]() при умові
при умові ![]() або .
або .![]() при умові
при умові ![]() , яке лінійно залежить від вимірювальної величини
, яке лінійно залежить від вимірювальної величини ![]() .
.
Текст
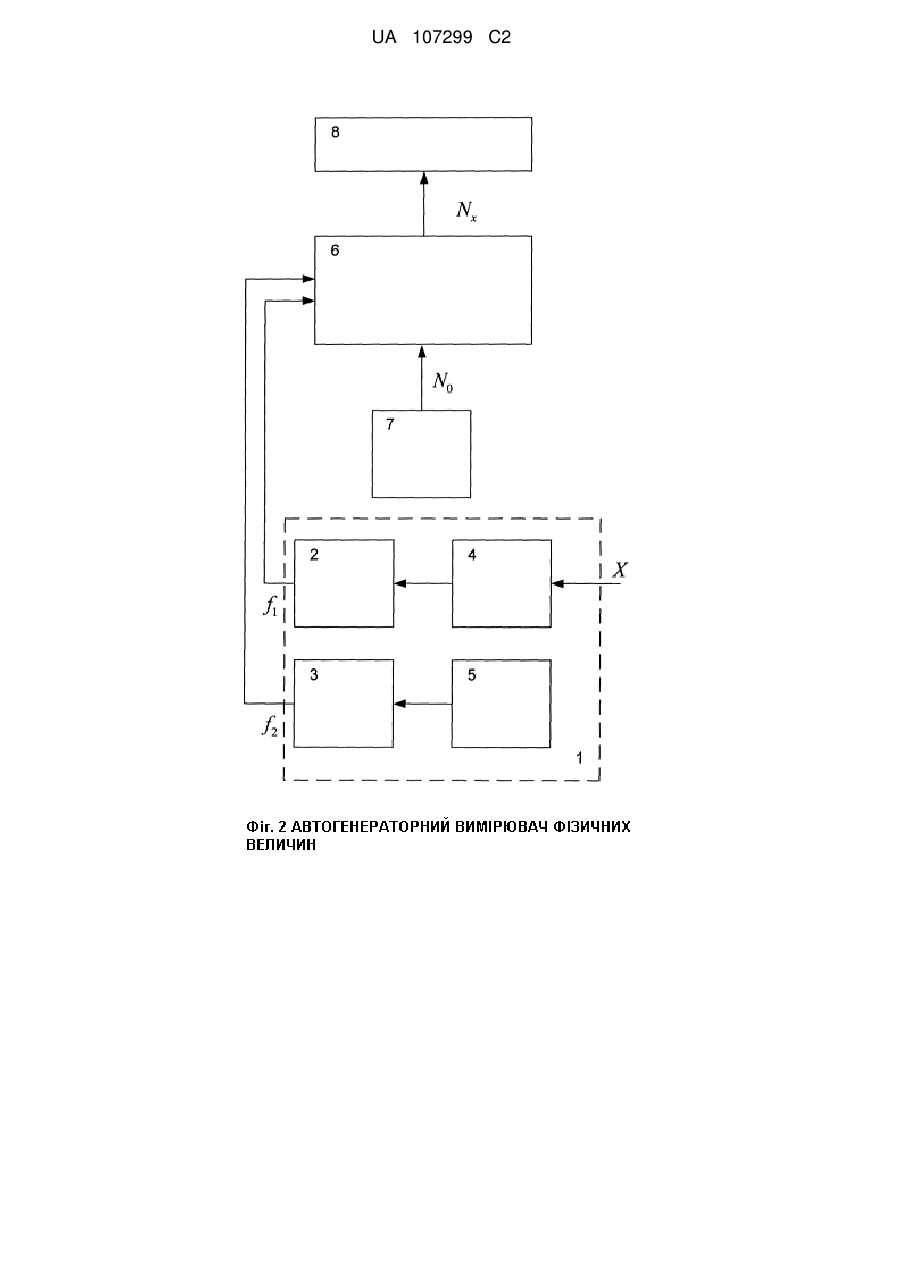
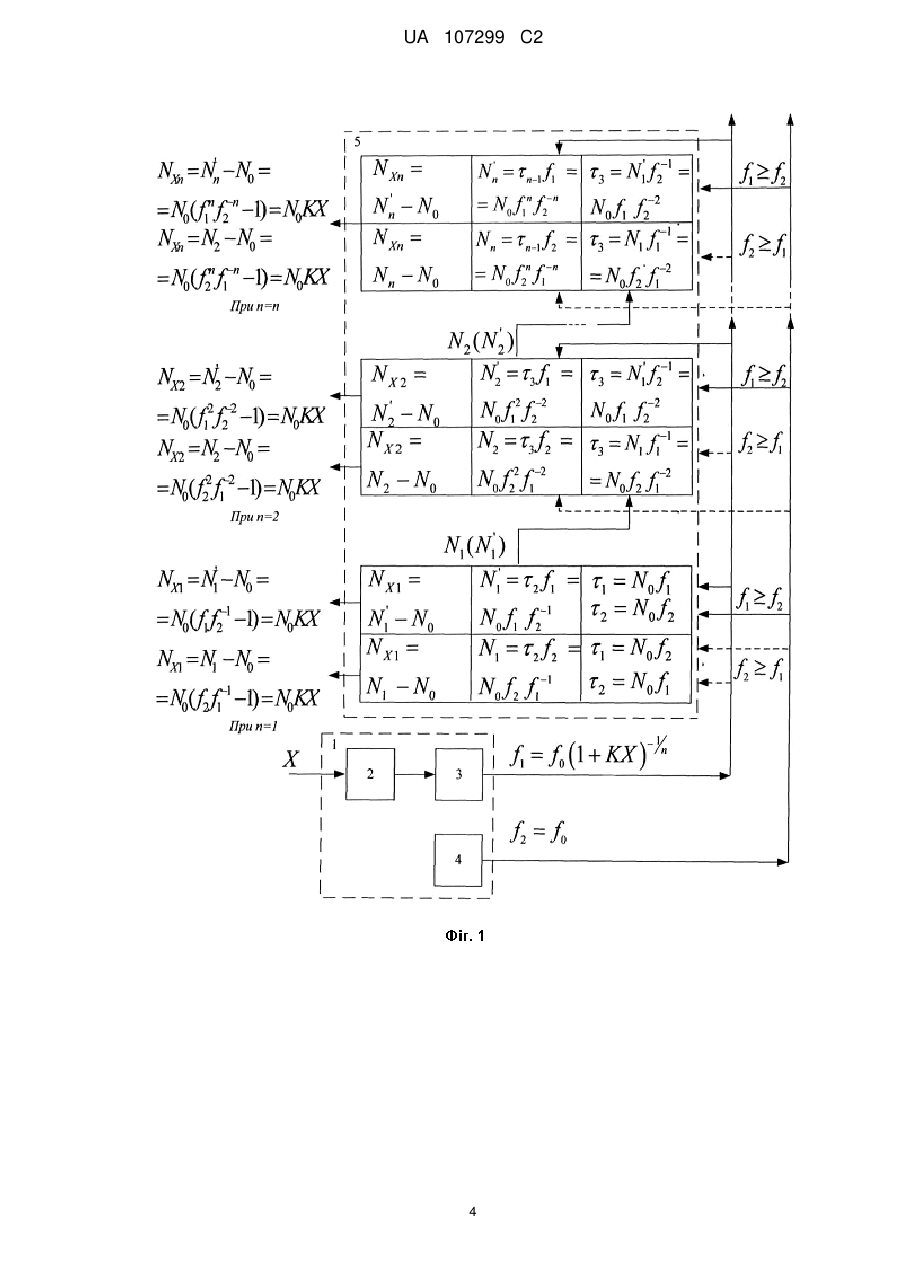
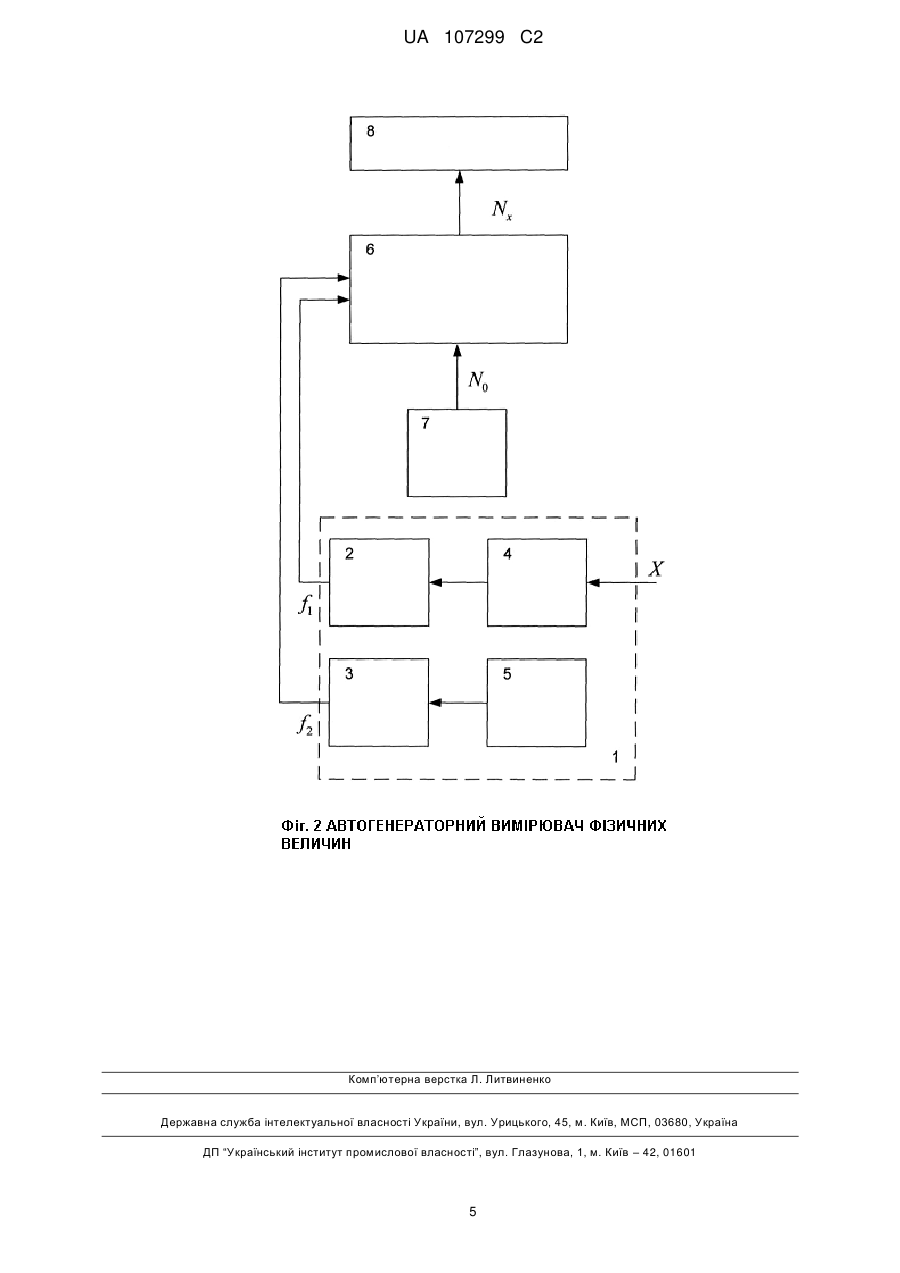
Реферат: Винахід належить до області вимірювальної техніки. Спосіб отримання принципово лінійної характеристики перетворення вимірювачів різноманітних фізичних величин з частотними 1 автогенераторними датчиками, що мають вихідні сигнали датчика: f1 f0 (1 KX) n та f2 f0 , де f1 - значення вихідного сигналу вимірювального каналу датчика, f2 - значення вихідного сигналу компенсаційного каналу датчика, f0 - значення вихідних сигналів вимірювального та компенсаційного каналів датчика при відсутності на вході вимірювальної величини, K коефіцієнт перетворення частотозадавального елемента датчика, X - вимірювальна величина, n - показник ступеня, що залежить від виду частотозадавального елемента автогенераторого датчика, що для більшості таких датчиків лежить у межах ± 8. Технічним результатом, що досягається даним винаходом, є підвищення точності і метрологічної надійності. UA 107299 C2 (12) UA 107299 C2 UA 107299 C2 5 10 15 20 25 Винахід належить до вимірювальної техніки і може бути використаний для отримання лінійної характеристики перетворення вимірювачів фізичних величин з частотними автогенераторними датчиками при їх розробці та у процесі вимірювання і контролю різноманітних фізичних величин, таких як: тиск, зусилля, температура, електрична ємність і т. і. На сьогодні відомим є спосіб отримання лінійної характеристики перетворення [1], за допомогою якого вхідний нелінійний безперервний сигнал подають через диференційний манометр з пневматичним виходом в струминний генератор з перетворенням в частоту, пропорційну вхідному сигналу. Суттєвими недоліками такого способу є те, що його використання обмежується параметрами, що можуть бути сприйняті диференційним манометром та струминним генератором. Також відомим є спосіб [2], який базується на тому, що сигнал п'єзорезонансного частотного вимірювального перетворювача, гетеродинують, отримуючи лінеаризовану градуювальну характеристику. Суттєвими недоліками такого способу є необхідність попереднього визначення функції перетворення первинного перетворювача для отримання лінійної характеристики перетворення та неможливість його використання для отримання лінійної характеристики перетворення інших датчиків, крім п'єзорезонансного зі змінним міжелектродним зазором. Найбільш близьким до способу який заявляється, є спосіб [3], що базується на визначенні співвідношення двох частот, перша з яких отримується як різниця частот некерованого та керованого вимірювальною величиною генераторів, друга отримується як різниця частот стабілізованого по частоті та керованого вимірювальною величиною генераторів. Суттєвими недоліками такого способу є значна складність конструкції, необхідність експериментального визначення коефіцієнта перетворення для забезпечення лінійної функції перетворення. В основу винаходу поставлено задачу створити спосіб отримання принципово лінійної характеристики перетворення вимірювачів різноманітних фізичних величин з частотними автогенераторними датчиками, що мають у загальному випадку наступні вихідні сигнали датчика 1 30 35 40 f0 (1 KX) n , f 2 f0 де f 1 - значення вихідного сигналу вимірювального каналу датчика, f 2 - значення вихідного сигналу компенсаційного каналу датчика, f 0 - значення вихідних сигналів вимірювального та компенсаційного каналів датчика при відсутності на вході вимірювальної величини, K коефіцієнт перетворення частотозадавального елемента датчика, X - вимірювальна величина, n - показник ступеня, що залежить від виду частотозадавального елемента автогенераторого датчика, що для більшості таких датчиків лежить у межах ± 8. Для вирішення поставленої задачі у способі отримання лінійної характеристики перетворення вимірювачів фізичних величин з частотними автогенераторними датчиками, який базується на перетворенні вихідного сигналу датчика - частоти, що нелінійно залежить від вимірювальної величини, в лінійно залежне вимірювальній величині число імпульсів наведеного на фіг. 1, вихідні сигнали частотного датчика 1, один з яких формують під дією вимірювальної величини X за допомогою частотозадавального елемента 2 вимірювального генератора 3 та f1 1 45 дорівнює f1 f0 (1 KX) n , а другий є незмінним і його формують за допомогою опорного генератора 4 та дорівнює f2 f0 , подають на перший та другий частотні входи мікроконтролера 5, де формують інтервали часу 1 та 2 , що заповнюють імпульсами з частотами f2 , отриманою від опорного генератора 4 та f1 , отриманою від вимірювального генератора 3, відповідно, при виконанні умови f2 f1 , або імпульсами з частотами f1 та f2 , відповідно, при виконанні умови f1 f2 до досягнення заздалегідь встановленого в пам'яті мікроконтролера 5 числа N0 , які зберігають у пам'яті мікроконтролера 5, далі за сформований інтервал часу 2 50 підраховують кількість імпульсів N1 2 f2 N0 f2 f1 1 , що надіслані на 2й вхід мікроконтролера 5 1 , що з частотою f2 , при виконанні умови f2 f1 , або кількість імпульсів N1 2 f1 N0 f1f2 надіслані на 1й вхід мікроконтролера 5 з частотою f1 , при виконанні умови f1 f2 , число імпульсів N1 або N1 зберігають у пам'яті мікроконтролера 5, після чого формують часовий 1 UA 107299 C2 інтервал 3 , який заповнюють імпульсами з частотою f1 до досягнення збереженого у пам'яті мікроконтролера 5 значення N1 , при виконанні умови f2 f1 , або імпульсами з частотою f2 , при виконанні умови f1 f2 до досягнення збереженого у пам'яті мікроконтролера 5 значення N1 , 5 1 1 часовий інтервал N0 f2 f1 2 або N0 f1f2 2 зберігають у пам'яті 3 N1f1 3 N1f2 мікроконтролера 5, далі послідовні операції формування часових імпульсів та чисел імпульсів продовжуються до формування числа імпульсів, що дорівнює Nn виконанні умови f2 f1 або Nn n 1f1 обчислення мікроконтролера N Xn 10 15 20 N0 n N0 f1 n f2 N0 n N0 f2 f1 n при n N0 f1 f2 n при виконанні умови f1 f2 , після чого у блоці 5 формують число імпульсів n N0 ( f0 ( f0 (1 KX) 1 n) n 1) N0KX , при виконанні умови f2 f1 1 KX) n )n n або N Xn Nn N0 N0 f1 f2 n N0 N0 ( f0 n ( f0 (1 1) N0KX при виконанні умови f1 f2 , яке лінійно залежить від вимірювальної величини X. На фіг. 2, для апаратної реалізації способу, зображена схема автогенераторного вимірювача фізичних величин, що містить: частотний автогенераторний датчик 1, в який входять вимірювальний 2 і опорний 3 автогенератори з вимірювальним 4, на який подають вимірювальну фізичну величину і опорним 5 ємнісними або індуктивними X частотозадавальними елементами, мікроконтролер 6, задатчик чутливості 7 і цифровий відліковий пристрій 8. Вимірювач працює наступним чином. При відсутності (нульовому значенні) вимірюваної фізичної величини ( X 0) на вході датчика 1, вимірювальний 2 і опорний 3 автогенератори виробляють частоти, відповідно f1 f2 f0 . Зміна значення величини X викликає пропорційну зміну ємності або індуктивності частотозадавального елемента 4 і відповідно зміну частоти f1 вимірювального генератора 2. Опорний генератор 3 з контурним елементом 5 виробляє незмінну, незалежну від значення X, частоту f2 f0 . Таким чином загальна характеристика перетворення автогенераторного частотного датчика: f1 25 30 Nn n 1f2 f0 (1 KX) 0,5 f 2 f0 де: K - коефіцієнт перетворення частотозадаючого элемента 4 генератора 2. Вихідні сигнали f1 і f2 вимірювального 2 і опорного 3 автогенераторів подають на перший та другий частотні входи мікроконтролера 6, де формують інтервал часу 1 , що заповнюють імпульсами з частотами f1 , отриманою від вимірювального генератора, до досягнення, заздалегідь встановленого задатчиком чутливості 7 в пам'яті мікроконтролера, числа N0 , далі 1 , що за сформований інтервал часу 1 підраховують кількість імпульсів N1 1f2 N0 f2 f1 надіслані на вхід 1 мікроконтролера з частотою f2 , число імпульсів N1 зберігають у пам'яті мікроконтролера, після чого формують часовий інтервал 2 , який заповнюють імпульсами з частотою f1 до досягнення збереженого у пам'яті мікроконтролера значення N1 , часовий 35 інтервал 2 N1f1 1 N0 f2 f1 2 зберігають у пам'яті мікроконтролера, після чого підраховують кількість імпульсів N2 , що надіслані на 2й вхід мікроконтролера з частотою f2 за інтервал часу 2 2 зберігають у пам'яті мікроконтролера. Далі в блоці , число імпульсів N2 2 f2 N0 f2 f1 обчислення МК виконують формування вихідного сигналу ВП у вигляді числового коду NX , що лінійно залежить від вимірювальної величини X наступним чином: 2 40 45 2 2 NX N2 N0 N0 f1 2f2 N0 N0 (f0 (f0 (1 KX) 0,5 ) 2 1) N0KX Технічним результатом є те, що в результаті виконання операцій за запропонованим способом вимірювач фізичних величин з частотними автогенераторними датчиками має принципово лінійну характеристику перетворення та може працювати із частотозадавальними елементами будь-якого типу при вимірюванні різноманітних фізичних величин. Використання запропонованого способу розширює галузь використання вимірювачів фізичних величин з частотними автогенераторними датчиками, підвищує точність і метрологічну надійність. 2 UA 107299 C2 5 Побудований на основі заявлюваного способу прилад має лінійну характеристику перетворення та працює із частотними датчиками з ємнісними частотозадавальними елементами і використовується для вимірювання та контролю тиску, сили і вологості з похибкою не більше ±0,1 %. Крім того, прилад має порівняно просту конструкцію. Джерела інформації: 1. Патент РФ № 2127496, H04R17/00, 10.03.1999. 2. Патент РФ № 2413269, G05B11/44, 27.02.2011. 3. А.С. СССР 1211664, G01R23/14, 15.02.1986. ФОРМУЛА ВИНАХОДУ 10 15 Спосіб отримання лінійної характеристики перетворення вимірювачів фізичних величин з частотними автогенераторними датчиками, що базується на перетворенні вихідного сигналу частотного датчика, що нелінійно залежить від вимірювальної величини, в лінійно залежне від вимірювальної величини число імпульсів, який відрізняється тим, що перший вихідний сигнал частотного датчика формують під дією вимірювальної величини X за допомогою вимірювального генератора та встановлюють таким, що дорівнює f1 1 n f0 (1 KX) , при 1 KX) n , 20 25 30 35 виконанні умови f2 f1 або f1 f0 (1 при виконанні умови f1 f2 , де f0 - значення вихідних сигналів датчика при відсутності на вході вимірювальної величини, n - показник ступеня, що залежить від виду частотозадавального елемента датчика, а другий вихідний сигнал частотного датчика формують за допомогою опорного генератора та встановлюють таким, що дорівнює f2 f0 , подають на перший та другий частотні входи мікроконтролера, де формують інтервали часу 1 та 2 , який заповнюють імпульсами з частотою f2 , отриманою від опорного генератора, та частотою f1 , отриманою від вимірювального генератора, відповідно, при виконанні умови f2 f1 , або імпульсами з частотами f1 та f2 , відповідно, при виконанні умови f1 f2 до досягнення заздалегідь встановленого в пам'яті мікроконтролера числа N0 , які зберігають у пам'яті мікроконтролера, далі за сформований інтервал часу 2 підраховують f2 , що надходять на вхід 1 мікроконтролера з частотою f , кількість імпульсів N1 2 f2 N0 2 f1 f1 при виконанні умови f2 f1 , або кількість імпульсів N1 2 f1 N0 f , що надходять на вхід 1 2 мікроконтролера з частотою f1 , при виконанні умови f1 f2 , число імпульсів N1 або N1 зберігають у пам'яті мікроконтролера, після чого формують часовий інтервал 3 , який заповнюють імпульсами з частотою f1 до досягнення збереженого у пам'яті мікроконтролера значення N1 , при виконанні умови f2 f1 , або імпульсами з частотою f2 , при виконанні умови f1 f2 до досягнення збереженого у пам'яті мікроконтролера значення N1 , часовий інтервал f f 1 1 N0 2 2 або N0 1 2 зберігають у пам'яті мікроконтролера, 3 N1 f 3 N1 f 1 2 f1 f2 послідовно формують часові імпульси та числа імпульсів, поки не буде досягнуто число імпульсів, що дорівнює Nn умові f1 Nn NX n N0 f1 f2 n Nn N0 N0 n N0 f1 n f2 N0 N0 N0 f0 n , при умові f2 1 n N0 f0 f0 (1 KX) n f0 (1 1 KX) n залежить від вимірювальної величини X . 3 f1 або Nn n N0 f1 n n , при f1 f2 f2 , після чого за допомогою блока обчислення мікроконтролера формують число імпульсів N X 40 n N0 f2 n 1f2 n 1f1 n 1 N0KX при умові f2 f1 або n 1 N0KX при умові f1 f2 , яке лінійно UA 107299 C2 4 UA 107299 C2 Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюHuselnikov Oleksii Viktorovych
Автори російськоюГусельников Алексей Викторович
МПК / Мітки
МПК: G01R 23/00, G01D 5/00
Мітки: фізичних, величин, спосіб, вимірювачів, лінеаризації, перетворення, автогенераторними, частотними, датчиками, характеристики
Код посилання
<a href="https://ua.patents.su/7-107299-sposib-linearizaci-kharakteristiki-peretvorennya-vimiryuvachiv-fizichnikh-velichin-z-chastotnimi-avtogeneratornimi-datchikami.html" target="_blank" rel="follow" title="База патентів України">Спосіб лінеаризації характеристики перетворення вимірювачів фізичних величин з частотними автогенераторними датчиками</a>
Спосіб вимірювання фізичних величин
Номер патенту: 27666
Опубліковано: 12.11.2007
Автори: Зелена Ольга Вікторівна, Шабатура Юрій Васильович
МПК: G01D 5/12
Мітки: величин, спосіб, вимірювання, фізичних
Формула / Реферат:
Спосіб вимірювання фізичних величин, який полягає у тому, що піддають фізичному впливу чутливий елемент, з використанням електричного параметра чутливого елемента, в результаті чого формують електричний сигнал, здійснюють програмну обробку цього сигналу з використанням інформації про передатні характеристики чутливого елемента, який відрізняється тим, що спочатку формують імпульсний тестовий сигнал, а значення вимірюваної фізичної величини...
Автогенераторний вимірювач фізичних величин
Номер патенту: 59973
Опубліковано: 10.06.2011
Автор: Гусельников Олексій Вікторович
МПК: G01L 11/00, G01K 15/00
Мітки: фізичних, величин, автогенераторний, вимірювач
Формула / Реферат:
Автогенераторний вимірювач фізичних величин, що містить частотний датчик, в який входять ідентичні вимірювальний та опорний автогенератори з ідентичними вимірювальним та опорним частотозадавальними елементами, який відрізняється тим, що в нього введено мікроконтролер, задатчик значення показника ступеня, задатчик чутливості і цифровий відліковий пристрій, причому виходи вимірювального та опорного автогенераторів з'єднано, відповідно, з...
Спосіб лінеаризації характеристики конвеєрної ваги
Номер патенту: 82051
Опубліковано: 11.03.2008
Автори: Кусайко Юрій Миколайович, Стехін Андрій Павлович, Свістєльнік Сергій Вікторович
МПК: G01G 11/00, B65G 15/00
Мітки: конвеєрної, лінеаризації, спосіб, характеристики, ваги
Формула / Реферат:
1. Спосіб лінеаризації характеристики конвеєрної ваги, який полягає у тому, що попередньо зважують з первісним передавальним коефіцієнтом декілька порцій матеріалу, що проходять через ваги з різними лінійними щільностями, і одночасно вимірюють відстань або час проходження порцій матеріалу, підраховують усереднені значення зміряних і дійсних лінійних щільностей або продуктивностей і за цими точками апроксимують реальну характеристику ваги, а...
Спосіб лінеаризації характеристики конвеєрної ваги
Номер патенту: 3732
Опубліковано: 15.12.2004
Автори: Свістєльнік Сергій Вікторович, Стехін Андрій Павлович, Кусайко Юрій Миколайович
МПК: B65G 15/00, G01G 11/00
Мітки: лінеаризації, конвеєрної, ваги, спосіб, характеристики
Формула / Реферат:
1. Спосіб лінеаризації характеристики конвеєрної ваги, який полягає у тому, що попередньо зважують з первісним передатним коефіцієнтом декілька порцій матеріалу, що проходять через ваги з різними лінійними щільностями, і одночасно вимірюють шлях або час проходження порцій матеріалу, підраховують усереднені значення виміряних і дійсних лінійних щільностей або продуктивностей і по цих точках апроксимують реальну характеристику ваги, а потім...
Спосіб вимірювання фізичних величин
Номер патенту: 47143
Опубліковано: 17.06.2002
Автори: Балабанов Ігор Валерійович, Збруцький Олександр Васильович, ТРОНЬ ЮРІЙ ОПАНАСОВИЧ, Балабанова Тетяна Василівна
МПК: G01D 9/00
Мітки: фізичних, спосіб, вимірювання, величин
Формула / Реферат:
Спосіб вимірювання фізичних величин шляхом перетворення вимірювальної фізичної величини в n каналах, вимірювання перетворених сигналів і послідовної математичної обробки цих сигналів, який відрізняється тим, що фізична величина, яка подається на вхід перетворювача 1-го канала формується як алгебраїчна сума вимірювальної фізичної величини і фізичних величин, пропорційних сигналам на виходах перетворювачів 2-го, 3-го,..., n-го каналів, фізична...
Попередній патент: Спосіб отримання зображення і багатошаровий носій для його здійснення
Наступний патент: Спосіб одержання повітряно-горіхового напівфабрикату
Випадковий патент: Моноклінний 2-хлор-n-(4' -хлорбіфеніл-2-іл)нікотинамід, спосіб його одержання, фунгіцидний засіб та спосіб боротьби з шкідливими грибами