Інтегрована навігаційна система автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху
Номер патенту: 109634
Опубліковано: 25.08.2016
Автори: Дохов Олександр Іванович, Лук'янов Олександр Михайлович, Катюшина Олена Володимирівна, Лук'янова Ольга Олексіївна

Формула / Реферат
Інтегрована навігаційна система автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху, що включає в себе центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу багатофункціональної автомобільної бортової апаратури входять: GNSS-приймач, приймач пакетів даних, поширюваних системою, контролер з інстальованим спеціалізованим програмним забезпеченням, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що кожна багатофункціональна автомобільна бортова апаратура додатково включає в себе інерціальну навігаційну систему, і при цьому кожен вихід центру збору і обробки інформації з'єднаний із входом одного з центрів поширення інформації, кожен центр поширення інформації передає дані багатофункціональній автомобільній бортовій апаратурі, у якій ці дані надходять на вхід приймача пакетів даних, поширюваних системою, вихід якого з'єднаний з першим входом контролера з інстальованим спеціалізованим програмним забезпеченням, вихід інерціальної навігаційної системи з'єднаний з другим входом контролера з інстальованим спеціалізованим програмним забезпеченням, а вихід GNSS-приймача з'єднаний з третім входом контролера з інстальованим спеціалізованим програмним забезпеченням, вихід якого з'єднаний із входом запам'ятовуючого блока, а блок електроживлення з'єднаний з входами живлення інерціальної навігаційної системи, GNSS-приймача, приймача пакетів даних, поширюваних системою, контролера з інстальованим спеціалізованим програмним забезпеченням і запам'ятовуючого блока, і при цьому вихід запам'ятовуючого блока на час передачі даних з'єднується з входом переносного апаратно-програмного модуля, вихід якого також на час передачі даних з'єднується з входом центру збору і обробки інформації.
Текст
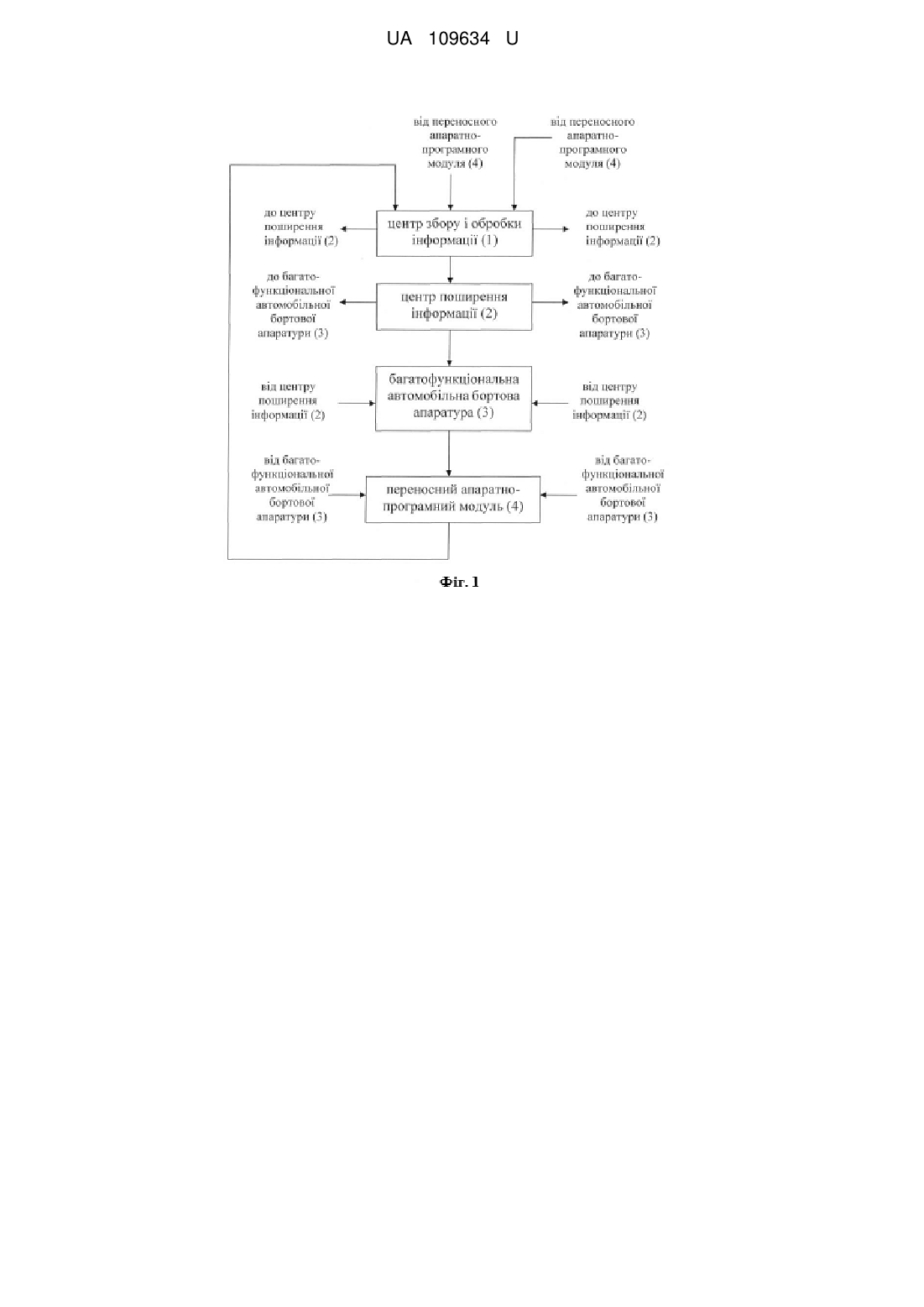
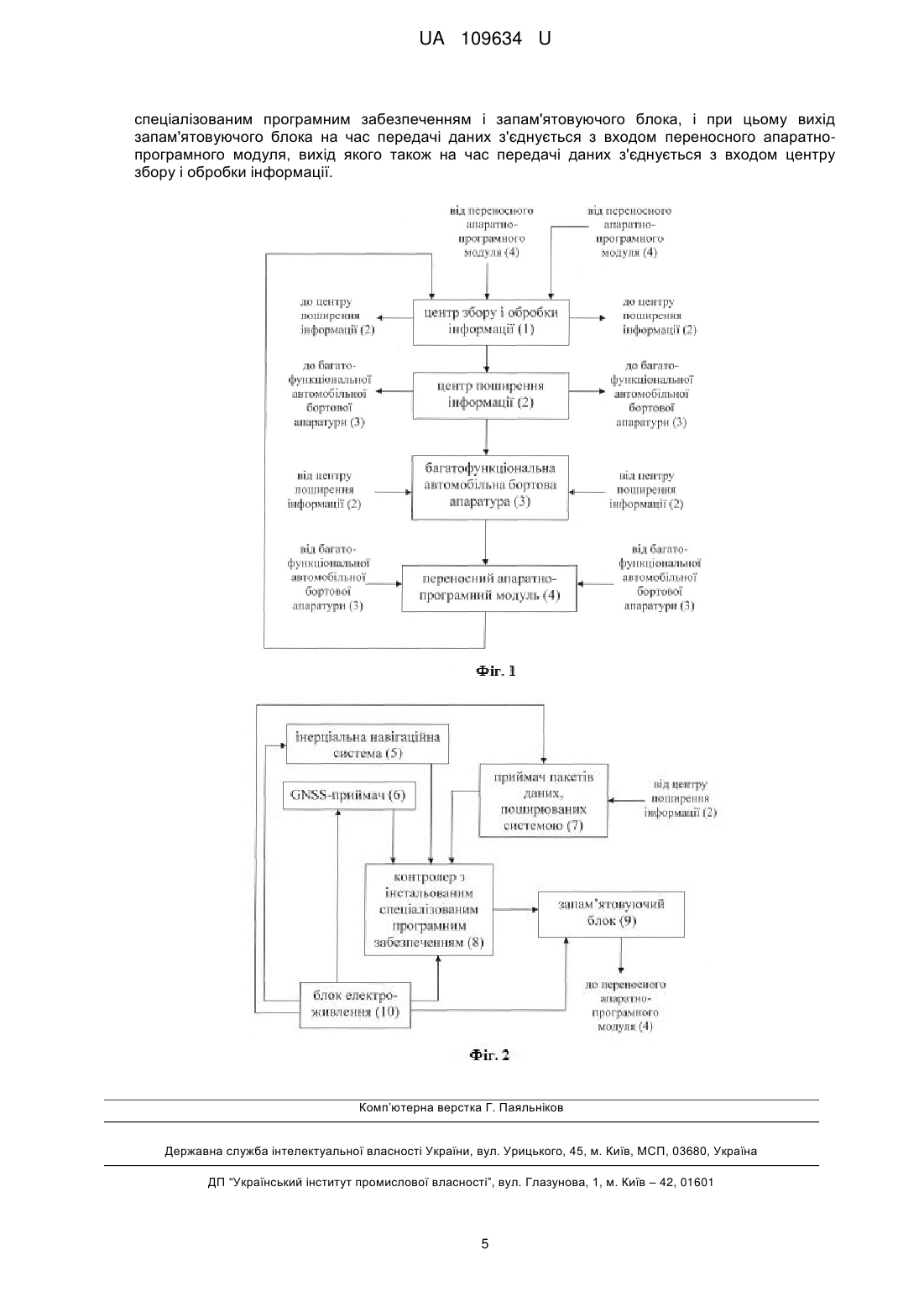
Реферат: Інтегрована навігаційна система автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху включає в себе центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратнопрограмні модулі. До складу багатофункціональної автомобільної бортової апаратури входять: GNSS-приймач, приймач пакетів даних, поширюваних системою, контролер з інстальованим спеціалізованим програмним забезпеченням, запам'ятовуючий блок і блок електроживлення. Кожна багатофункціональна автомобільна бортова апаратура додатково включає в себе інерціальну навігаційну систему. UA 109634 U (12) UA 109634 U UA 109634 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до навігаційної техніки та може бути використана для підвищення безпеки руху автомобільного транспорту. Відомий пристрій для попередження водія автотранспорту про близькість аварійно небезпечного об'єкта [Патент України на винахід № 79446 МПК G08G 1/00, опублікований 25.06.2007, Бюлетень № 9]. Цей пристрій складається з GPS-приймача, електронного блока перетворення, запам'ятовуючого блока, блока фільтрації сигналів, блока порівняння, генератора світлового та звукового випромінювача і блока електроживлення, причому в ньому вихід GPS-приймача з'єднаний з першими входами блока фільтрації сигналів і електронного блока перетворення, другими виходом і входом електронний блок перетворення з'єднаний з другими входом і виходом блока фільтрації сигналів, третіми входом і виходом блок фільтрації сигналів з'єднаний з першими виходом і входом запам'ятовуючого блока, перший вихід електронного блока перетворення і другий вихід запам'ятовуючого блока з'єднані зі входами блока порівняння, вихід якого з'єднаний зі світловим та звуковим випромінювачами через генератор, а блок електроживлення з'єднаний з входами живлення GPS-приймача, електронного блока перетворення та генератора світлового та звукового випромінювача. Даний пристрій за сигналами супутникових навігаційних систем визначає координати автотранспортного засобу і, порівнявши їх з координатами аварійно небезпечних об'єктів, що зберігаються у базі даних, генерує сигнал попередження водія у разі наближення автомобіля до такого об'єкта. Цей пристрій має такі функціональні обмеження: 1) він дозволяє обчислити лише координати автомобіля, але не передбачає визначення напрямку і швидкості його руху, що унеможливлює автоматичне визначення ряду порушень правил руху (наприклад, перевищення швидкості); 2) він лише сповіщає про наближення автотранспортного засобу до того чи іншого об'єкта, але не аналізує дані про обмеження для параметрів руху, які існують на різних ділянках траєкторії автомобіля; 3) він не дозволяє накопичувати і зберігати вимірювальну навігаційну інформацію та результати її обробки і аналізу; 4) він не дає можливості проводити детальний аналіз зареєстрованої інформації і контролювати правильність сформованих попереджень. Найближчою за технічною суттю до пропонованої корисної моделі є система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху [Патент України на винахід № 88999 МПК G01С 21/26, G08G 1/052, G08G 1/056, опублікований 10.12.2009, Бюлетень № 23]. Ця система містить в собі центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу багатофункціональної автомобільної бортової апаратури входять: GNSS-приймач, приймач пакетів даних, поширюваних системою, контролер з інстальованим спеціалізованим програмним забезпеченням, запам'ятовуючий блок і блок електроживлення. При цьому кожен вихід центру збору і обробки інформації з'єднаний із входом одного з центрів поширення інформації, кожен центр поширення інформації передає дані автотранспортним засобам, обладнаним багатофункціональною автомобільною бортовою апаратурою, у якій ці дані надходять на вхід приймача пакетів даних, поширюваних системою, вихід якого з'єднаний з першим входом контролера з інстальованим спеціалізованим програмним забезпеченням, вихід GNSS-приймача з'єднаний з другим входом контролера з інстальованим спеціалізованим програмним забезпеченням, вихід якого з'єднаний з входом запам'ятовуючого блока, при цьому блок електроживлення з'єднаний з входами живлення GNSS-приймача, приймача пакетів даних, поширюваних системою, контролера з інстальованим спеціалізованим програмним забезпеченням і запам'ятовуючого блока, а вихід запам'ятовуючого блока на час передачі даних з'єднується з входом переносного апаратнопрограмного модуля, вихід якого також на час передачі даних з'єднується з входом центру збору і обробки інформації. Дана система функціонує наступним чином. Обмеження для параметрів руху, що визначаються правилами дорожнього руху і дорожніми знаками, передаються автомобільній багатофункціональній апаратурі, де з ними порівнюються реальні значення параметрів руху автомобіля, обчислені за сигналами глобальних навігаційних супутникових систем, і, якщо результати аналізу даної інформації свідчать про порушення правил руху, то ці результати, разом з відповідними навігаційними вимірами, заносяться до спеціалізованого автомобільного запам'ятовуючого блока. Під час чергової перевірки працівниками ДАІ (патрульної поліції), через переносний апаратно-програмний модуль, ці дані передаються до центру збору і обробки інформації, де виконується їхня обробка з залученням вимірів найближчих базових станцій 1 UA 109634 U 5 10 15 20 25 30 35 40 45 50 55 60 супутникової навігації, в результаті якої остаточно визначається наявність чи відсутність порушення правил дорожнього руху. Ця система має наступні функціональні обмеження. Високі будинки, мости та інші споруди, розташовані поблизу місця перебування автомобіля, обладнаного багатофункціональною автомобільною бортовою апаратурою, можуть відбивати або затіняти сигнали навігаційних супутників, що значно підвищує погрішності вимірів GNSS-приймача або викликає перерви у навігаційних вимірах. Якість зареєстрованих в таких умовах навігаційних вимірів може виявитися надто низькою для визначення на їх основі координат та швидкості автомобіля з точністю, необхідною для проведення автоматизованого контролю дотримання водієм правил дорожнього руху. Крім того, через екранування сигналів навігаційних супутників об'єктами навколишнього середовища, кількість одночасно зареєстрованих навігаційних вимірів може бути недостатньою для визначення координат та швидкості автомобіля виключно на основі цих даних. Наслідком цього буде перерва у визначенні параметрів руху автомобіля, а отже, і в процесі контролю дотримання правил дорожнього руху. Ситуації, у яких об'єкти навколишнього середовища відбивають або затіняють сигнали навігаційних супутників, часто виникають при русі автомобіля вулицями міста. Задачею корисної моделі є розширення функціональних можливостей системи шляхом доповнення багатофункціональної автомобільної бортової апаратури інерціальною навігаційною системою. Поставлена задача вирішується в інтегрованій навігаційній системі автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху, що включає в себе собі центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу багатофункціональної автомобільної бортової апаратури входять: GNSS-приймач, приймач пакетів даних, поширюваних системою, контролер з інстальованим спеціалізованим програмним забезпеченням, запам'ятовуючий блок і блок електроживлення, згідно з корисною моделлю, кожна багатофункціональна автомобільна бортова апаратура додатково включає в себе інерціальну навігаційну систему, і при цьому кожен вихід центру збору і обробки інформації з'єднаний із входом одного з центрів поширення інформації, кожен центр поширення інформації передає дані багатофункціональній автомобільній бортовій апаратурі, у якій ці дані надходять на вхід приймача пакетів даних, поширюваних системою, вихід якого з'єднаний з першим входом контролера з інстальованим спеціалізованим програмним забезпеченням, вихід інерціальної навігаційної системи з'єднаний з другим входом контролера з інстальованим спеціалізованим програмним забезпеченням, а вихід GNSS-приймача з'єднаний з третім входом контролера з інстальованим спеціалізованим програмним забезпеченням, вихід якого з'єднаний із входом запам'ятовуючого блока, а блок електроживлення з'єднаний з входами живлення інерціальної навігаційної системи, GNSS-приймача, приймача пакетів даних, поширюваних системою, контролера з інстальованим спеціалізованим програмним забезпеченням і запам'ятовуючого блока, і при цьому вихід запам'ятовуючого блока на час передачі даних з'єднується з входом переносного апаратно-програмного модуля, вихід якого також на час передачі даних з'єднується з входом центру збору і обробки інформації. На Фіг. 1 зображено загальну схему запропонованої системи. На Фіг. 2 зображено схему багатофункціональної автомобільної бортової апаратури, яка є складовою частиною запропонованої системи. Інтегрована навігаційна система автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху включає в себе (Фіг. 1) центр збору і обробки інформації 1, центри поширення інформації 2, багатофункціональну автомобільну бортову апаратуру 3, переносні апаратно-програмні модулі 4, причому до складу багатофункціональної автомобільної бортової апаратури 3 входять (Фіг. 2): інерціальна навігаційна система 5, GNSS-приймач б, приймач пакетів даних, поширюваних системою 7, контролер з інстальованим спеціалізованим програмним забезпеченням 8, запам'ятовуючий блок 9 і блок електроживлення 10. При цьому кожен вихід центру збору і обробки інформації 1 з'єднаний із входом одного з центрів поширення інформації 2, кожен центр поширення інформації 2 передає дані автотранспортним засобам, обладнаним багатофункціональною автомобільною бортовою апаратурою 3, у якій ці дані надходять на вхід приймача пакетів даних, поширюваних системою 7, вихід якого з'єднаний з першим входом контролера з інстальованим спеціалізованим програмним забезпеченням 8, вихід інерціальної навігаційної системи 5 з'єднаний з другим входом контролера з інстальованим спеціалізованим програмним забезпеченням 8, а вихід GNSS-приймача б з'єднаний з третім входом контролера з інстальованим спеціалізованим програмним забезпеченням 8, вихід якого з'єднаний з входом запам'ятовуючого блока 9, і при цьому блок 2 UA 109634 U 5 10 15 20 25 30 35 40 45 50 55 60 електроживлення 10 з'єднаний з входами живлення інерціальної навігаційної системи 5, GNSSприймача 6, приймача пакетів даних, поширюваних системою 7, контролера з інстальованим спеціалізованим програмним забезпеченням 8 і запам'ятовуючого блока 9, а вихід запам'ятовуючого блока 9 на час передачі даних з'єднується з входом переносного апаратнопрограмного модуля 4, вихід якого також на час передачі даних з'єднується з входом центру збору і обробки інформації 1. Система працює таким чином. У центрі збору і обробки інформації 1 зберігається база даних, що містить інформацію про діапазони координат, в межах яких діють обмеження (заборона парковки, обмеження швидкості або напрямків руху тощо), що визначаються розміщеними на вулицях даного населеного пункту дорожніми знаками. Сформовані на основі цієї інформації пакети даних, що містять формалізовані для подальшого використання правила руху, передаються за допомогою провідного зв'язку в центри поширення інформації 2. При цьому пакет даних, що надходить до центру поширення інформації 2, містить правила руху лише тими ділянками вулиць, які розташовані в межах зони, прилеглої до цього центру і закріпленої за ним. Кожен з центрів поширення інформації 2 безперервно транслює ці дані, а також інформацію про межі даної зони для усіх автотранспортних засобів, що перебувають на території цієї зони і оснащені багатофункціональною автомобільною бортовою апаратурою 3. Для цього може використовуватися будь-який радіозв'язок (ультракороткохвильовий, GSM/GPRS або Wi-Fi зв'язок). У багатофункціональній автомобільній бортовій апаратурі 3 контролер з інстальованим спеціалізованим програмним забезпеченням 8 виконує спільну обробку вихідних даних інерціальної навігаційної системи 5 та навігаційних вимірів, зареєстрованих GNSS-приймачем б. В результаті цієї обробки безперервно оцінюються поточні значення параметрів руху (координат і компонентів вектора швидкості) даного автомобіля. Одночасно з цим приймач пакетів даних, поширюваних системою 7 безперервно приймає дані, що транслюються усіма центрами поширення інформації 2, які перебувають в області радіовидимості для поточного місця перебування автомобіля. На основі отриманих координат контролер з інстальованим спеціалізованим програмним забезпеченням 8 визначає, в якій зоні населеного пункту перебуває даний автомобіль, і виконує спільну обробку обчислених значень параметрів руху автомобіля з формалізованими правилами руху, прийнятими від центру поширення інформації 2, розташованого у цій зоні. В ході цієї обробки перевіряється відповідність значень параметрів руху автомобіля обмеженням, що існують для них у поточному місці перебування цього автомобіля. В результаті визначається, чи дотримується водій правил дорожнього руху. У разі фіксації порушення інформація про нього, а також відповідні GNSS-виміри, вихідні дані інерціальної навігаційної системи 5 і дані щодо обмежень для параметрів руху автотранспортних засобів, на основі яких було ідентифіковане порушення, заносяться до запам'ятовуючого блока 9. Блок електроживлення 10 забезпечує багатофункціональну автомобільну бортову апаратуру 3 електроживленням. Переносні апаратно-програмні модулі 4 призначені для отримання інформації, що накопичилась у бортовому запам'ятовуючому блоці 9 автомобіля, її відображення на екрані (що дає можливість її оперативного аналізу) і передачі в центр збору і обробки інформації 1. До складу переносного апаратно-програмного модуля 4 входять: невеликий переносний комп'ютер з програмним забезпеченням, призначеним для проведення оперативного аналізу інформації, пристрій для зчитування даних із запам'ятовуючого блока 9, що входить до складу багатофункціональної автомобільної бортової апаратури 3, і пристрій для передачі даних до центру збору і обробки інформації 1. У центрі збору і обробки інформації 1, куди регулярно надходять дані від переносних апаратно-програмних модулів 4, виконується обробка й детальний аналіз GNSS-вимірів та вихідних даних інерціальної навігаційної системи 5, накопичених у запам'ятовуючому блоці 9 кожного автомобіля, оснащеного багатофункціональною автомобільною бортовою апаратурою 3. В ході цієї обробки залучається інформація найближчих перманентних та/або контрольних диференціальних станцій супутникової навігації, що дозволяє отримати більш точну оцінку параметрів руху автомобіля. В процесі виконуваного аналізу перевіряється, чи дійсно зареєстрована інформація підтверджує факт порушення правил дорожнього руху. Дані, при аналізі яких факт порушення підтвердився, накопичуються і архівуються. Таким чином, створюється єдина база даних, що містить усі порушення правил дорожнього руху, скоєні водіями у межах даного населеного пункту. Вона може бути використана для автоматизованого виявлення порушників, а також для вивчення статистики порушень правил руху. Під час створення даної системи населений пункт, де вона впроваджується в дію, поділяється на зони (їх кількість визначається розмірами цього пункту), в кожній з яких 3 UA 109634 U 5 10 15 20 25 30 35 розгортається центр поширення інформації 2. Межі цих зон визначаються таким чином, щоб зони деякою мірою перекривалися, завдяки чому досягається безперервність забезпечення користувачів інформацією про правила руху. Кожен з центрів поширення інформації 2 з'єднується за допомогою провідного зв'язку з єдиним центром збору і обробки інформації 1, а також оснащується радіотехнічним пристроєм для передачі споживачам інформації про формалізовані правила руху та про межі даної зони. В рамках центру збору і обробки інформації 1 створюється одне або кілька (в залежності від розмірів населеного пункту, в якому введено в дію пропоновану систему) автоматизованих робочих місць, оснащених настільними комп'ютерами, на яких зберігається база даних, що містить інформацію про діапазони дії усіх дорожніх знаків даного населеного пункту, а також інстальоване програмне забезпечення, призначене для формування формалізованих правил руху (обмежень) і для проведення ретельної обробки і детального аналізу інформації, накопиченої у запам'ятовуючих блоках 9, що входять до складу багатофункціональної автомобільної бортової апаратури 3. Автотранспортні засоби обладнуються багатофункціональною бортовою апаратурою 3, а працівники ДАІ (патрульної поліції) забезпечуються переносними апаратно-програмними модулями 4 і використовують їх в рамках проведення чергових перевірок. Таким чином, запропонована система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху базується на обчисленні і подальшому аналізі не тільки координат, але й компонентів вектора швидкості даного автомобіля. При цьому параметри руху автомобіля визначаються в результаті спільної обробки інформації глобальних навігаційних супутникових систем та вихідних даних інерціальної навігаційної системи 5, завдяки чому забезпечується стабільно висока точність, безперервність та надійність визначення координат і швидкості автомобіля незалежно від впливу об'єктів, що оточують цей автомобіль. Спільна обробка усіх визначених параметрів руху автомобіля та існуючих формалізованих правил дорожнього руху забезпечує безперервне та надійне здійснення контролю дотримання правил дорожнього руху, зокрема обов'язкове виявлення таких допущених порушень правил руху, як перевищення швидкості, порушення правил паркування, виїзд на зустрічну смугу, розворот у неналежному місці. Збереження даних про виявлені порушення правил дорожнього руху в бортовому запам'ятовуючому блоці 9 кожного транспортного засобу дає можливість централізованого збору і накопичення цієї інформації для її подальшої обробки і аналізу. Наявність у складі запропонованої системи центру збору і обробки інформації 1 дозволяє виконувати ретельну обробку зібраних автомобільною бортовою апаратурою даних, при проведенні якої передбачене залучення додаткової інформації, сформованої найближчими GNSS базовими станціями. Завдяки цьому підвищується надійність остаточних висновків про наявність чи відсутність порушення правил дорожнього руху у кожному конкретному випадку. Внаслідок усього зазначеного, використання даної системи дозволить підвищити дисципліну водіїв, а отже, скоротити кількість дорожньо-транспортних пригод на автодорогах і зробити дорожній рух безпечнішим. 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 60 Інтегрована навігаційна система автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху, що включає в себе центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу багатофункціональної автомобільної бортової апаратури входять: GNSS-приймач, приймач пакетів даних, поширюваних системою, контролер з інстальованим спеціалізованим програмним забезпеченням, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що кожна багатофункціональна автомобільна бортова апаратура додатково включає в себе інерціальну навігаційну систему, і при цьому кожен вихід центру збору і обробки інформації з'єднаний із входом одного з центрів поширення інформації, кожен центр поширення інформації передає дані багатофункціональній автомобільній бортовій апаратурі, у якій ці дані надходять на вхід приймача пакетів даних, поширюваних системою, вихід якого з'єднаний з першим входом контролера з інстальованим спеціалізованим програмним забезпеченням, вихід інерціальної навігаційної системи з'єднаний з другим входом контролера з інстальованим спеціалізованим програмним забезпеченням, а вихід GNSS-приймача з'єднаний з третім входом контролера з інстальованим спеціалізованим програмним забезпеченням, вихід якого з'єднаний із входом запам'ятовуючого блока, а блок електроживлення з'єднаний з входами живлення інерціальної навігаційної системи, GNSSприймача, приймача пакетів даних, поширюваних системою, контролера з інстальованим 4 UA 109634 U спеціалізованим програмним забезпеченням і запам'ятовуючого блока, і при цьому вихід запам'ятовуючого блока на час передачі даних з'єднується з входом переносного апаратнопрограмного модуля, вихід якого також на час передачі даних з'єднується з входом центру збору і обробки інформації. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G08G 1/056, G01C 21/28, G08G 1/052
Мітки: навігаційна, дотримання, автомобіля, інтегрована, правил, руху, водієм, контролю, автоматизованого, система, дорожнього
Код посилання
<a href="https://ua.patents.su/7-109634-integrovana-navigacijjna-sistema-avtomatizovanogo-kontrolyu-dotrimannya-vodiehm-avtomobilya-pravil-dorozhnogo-rukhu.html" target="_blank" rel="follow" title="База патентів України">Інтегрована навігаційна система автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху</a>
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху

Номер патенту: 88999
Опубліковано: 10.12.2009
Автори: Лук'янов Олександр Михайлович, Дохов Олександр Іванович, Грінченко Олена Володимирівна, Лук'янова Ольга Олексіївна
МПК: G08G 1/056, G01C 21/26, G08G 1/052
Мітки: автомобіля, водієм, руху, дотримання, система, правил, автоматизованого, дорожнього, контролю
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні апаратно-програмні модулі, а багатофункціональна автомобільна...
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди
Номер патенту: 91792
Опубліковано: 25.08.2010
Автори: Лук'янов Олександр Михайлович, Лук'янова Ольга Олексіївна, Сітенко Олександр Миколайович, Грінченко Олена Володимирівна, Дохов Олександр Іванович
МПК: G01C 21/26, G08G 1/052, G08G 1/056
Мітки: правил, руху, визначення, дорожньо-транспортної, пригоди, дотримання, дорожнього, водієм, система, автомобіля, контролю, автоматизованого, факту, виникнення
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GPS/GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні...
Автоматизована система аналізу дотримання правил дорожнього руху, виявлення причин виникнення дорожньо-транспортних пригод і контролю користування платними ділянками
Номер патенту: 106291
Опубліковано: 11.08.2014
Автори: Дохов Олександр Іванович, Галевич Максим Миколайович, Лук'янов Олександр Михайлович, Лук'янова Ольга Олексіївна, Грінченко Олена Володимирівна
МПК: G08G 1/056, G07B 15/00, G08G 1/0962, G08G 1/052, G01C 21/26
Мітки: руху, система, виникнення, виявлення, ділянками, правил, причин, дорожнього, дотримання, контролю, аналізу, платними, дорожно-транспортних, пригод, користування, автоматизована
Формула / Реферат:
Автоматизована система аналізу дотримання правил дорожнього руху, виявлення причин виникнення дорожньо-транспортних пригод і контролю користування платними ділянками, що включає в себе центр збору і обробки інформації, центри поширення інформації, багатофункціональну автомобільну бортову апаратуру і переносні апаратно-програмні модулі, причому до складу центру збору і обробки інформації входять: приймальний пристрій, блок екстреного...
Система для персоніфікації дотримання правил дорожнього руху (пдпдр) транспортним засобом та спосіб її використання
Номер патенту: 99251
Опубліковано: 10.08.2012
Автор: Денисов Олександр Костянтинович
МПК: G08G 1/052, G08G 1/017
Мітки: спосіб, транспортним, правил, дорожнього, використання, пдпдр, засобом, система, персоніфікації, руху, дотримання
Формула / Реферат:
1. Система для персоніфікації дотримання правил дорожнього руху транспортним засобом, яка містить приймально-передавальний радіокомплекс (1) з блоком енергозабезпечення (2) та антенами (3), блоком зчитування (4), блоком контролю інформації (5), дешифратором (6), перетворювачем коду (7), пристроєм керування зчитування, накопичення і аналізу отриманої через радіомітки інформації, а також передачі цієї інформації на інші системи, блоком...
Спосіб автоматизованого контролю виконання правил дорожнього руху
Номер патенту: 12164
Опубліковано: 16.01.2006
Автори: Душник Володимир Феліксович, Ущенко Валентин Іванович, Бурачек Всеволод Германович, Зайцев Сергій Анатолійович, Васильєв Олександр Павлович
МПК: G08G 1/01
Мітки: руху, правил, спосіб, контролю, автоматизованого, дорожнього, виконання
Формула / Реферат:
Спосіб автоматизованого контролю виконання Правил дорожнього руху, що включає вимірювання швидкості дорожньо-транспортного засобу (ДТЗ), що контролюється, та урахування супутніх факторів фіксування порушень Правил дорожнього руху з застосуванням процесора, який відрізняється тим, що при встановленні факту порушення швидкісного режиму водієм ДТЗ визначають та вводять в пам'ять процесора номер вимірювача швидкості ДТЗ, дату порушення, код...
Попередній патент: Спосіб визначення морфологічних показників річкових раків
Наступний патент: Спосіб діагностики розвитку остеопорозу
Випадковий патент: Модульна водогрійна газова установка для зовнішнього використання