Вимірювач кутових координат цілі оглядових моноімпульсних систем в умовах дії активних корельованих перешкод
Номер патенту: 109822
Опубліковано: 12.09.2016
Автори: Молчанов Дмитро Вікторович, Таршин Володимир Анатолійович, Дорошко Ігор Миколайович, Лук'янчук Вадим Володимирович, Васильєв Вадим Анатолійович, Коломійцев Олексій Володимирович, Фоменко Дмитро Володимирович

Формула / Реферат
Вимірювач кутових координат цілі оглядових моноімпульсних систем в умовах дії активних корельованих перешкод, який містить пристрій ділення і помножувач; канал формування ![]() , який складений з послідовно з'єднаних матричного помножувача, узгодженого фільтра і квадратичного детектора; канал формування
, який складений з послідовно з'єднаних матричного помножувача, узгодженого фільтра і квадратичного детектора; канал формування ![]() , який складений з послідовно з'єднаних матричного помножувача і узгодженого фільтра; блок адаптації, який складений з послідовно з'єднаних матричного помножувача, суматора і інтегратора, та блок адаптації, який складений з послідовно з'єднаних матричного помножувача, суматора і інтегратора, який відрізняється тим, що додатково введено канал формування
, який складений з послідовно з'єднаних матричного помножувача і узгодженого фільтра; блок адаптації, який складений з послідовно з'єднаних матричного помножувача, суматора і інтегратора, та блок адаптації, який складений з послідовно з'єднаних матричного помножувача, суматора і інтегратора, який відрізняється тим, що додатково введено канал формування ![]() , який складений з послідовно з'єднаних помножувача, узгодженого фільтра і квадратичного детектора, канал формування
, який складений з послідовно з'єднаних помножувача, узгодженого фільтра і квадратичного детектора, канал формування ![]() , який складений з послідовно з'єднаних помножувача і узгодженого фільтра, а також помножувач, пристрій ділення, блок порівняння, логічний елемент, блок формування контрольного сигналу (КС) та датчик КС.
, який складений з послідовно з'єднаних помножувача і узгодженого фільтра, а також помножувач, пристрій ділення, блок порівняння, логічний елемент, блок формування контрольного сигналу (КС) та датчик КС.
Текст
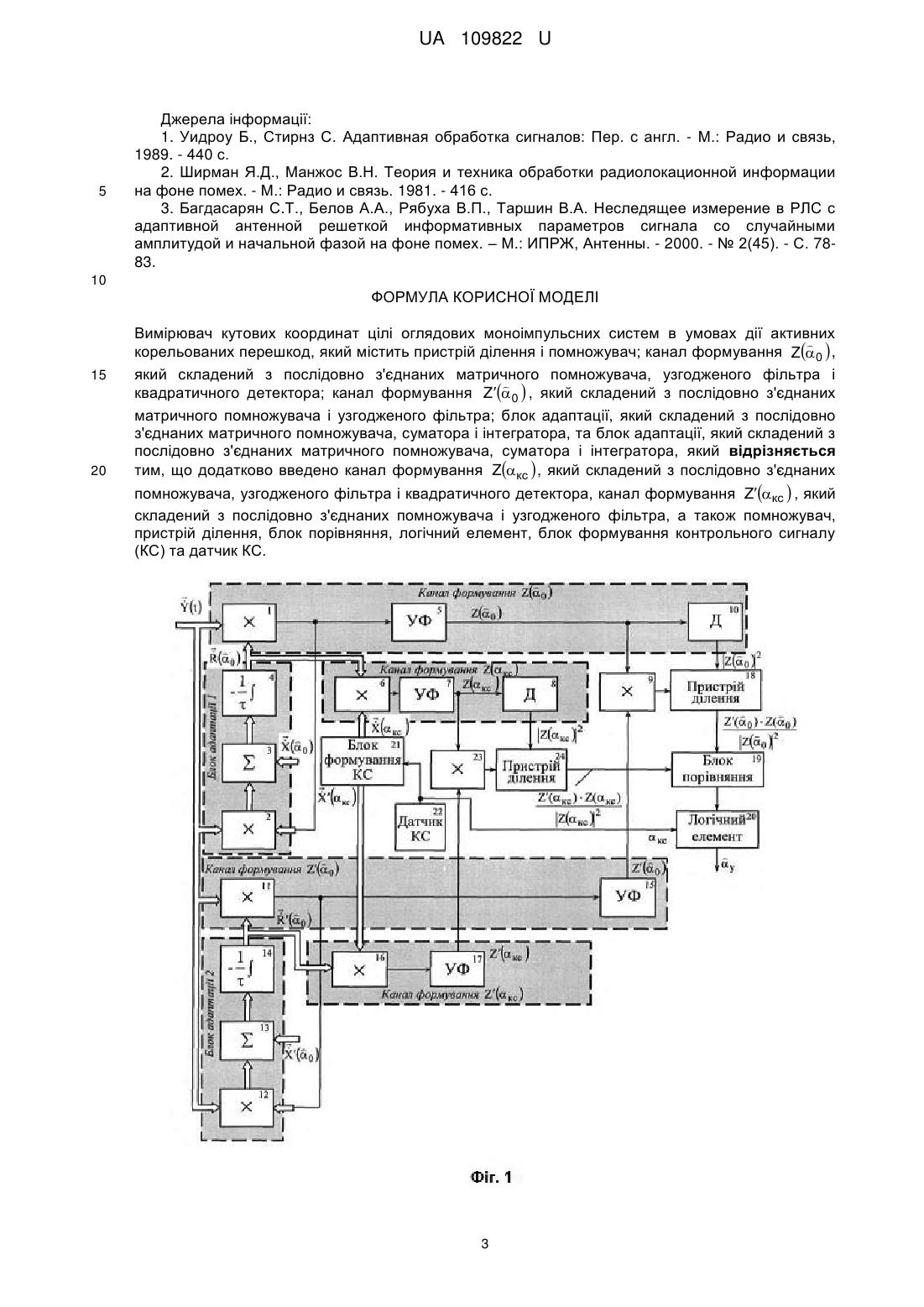
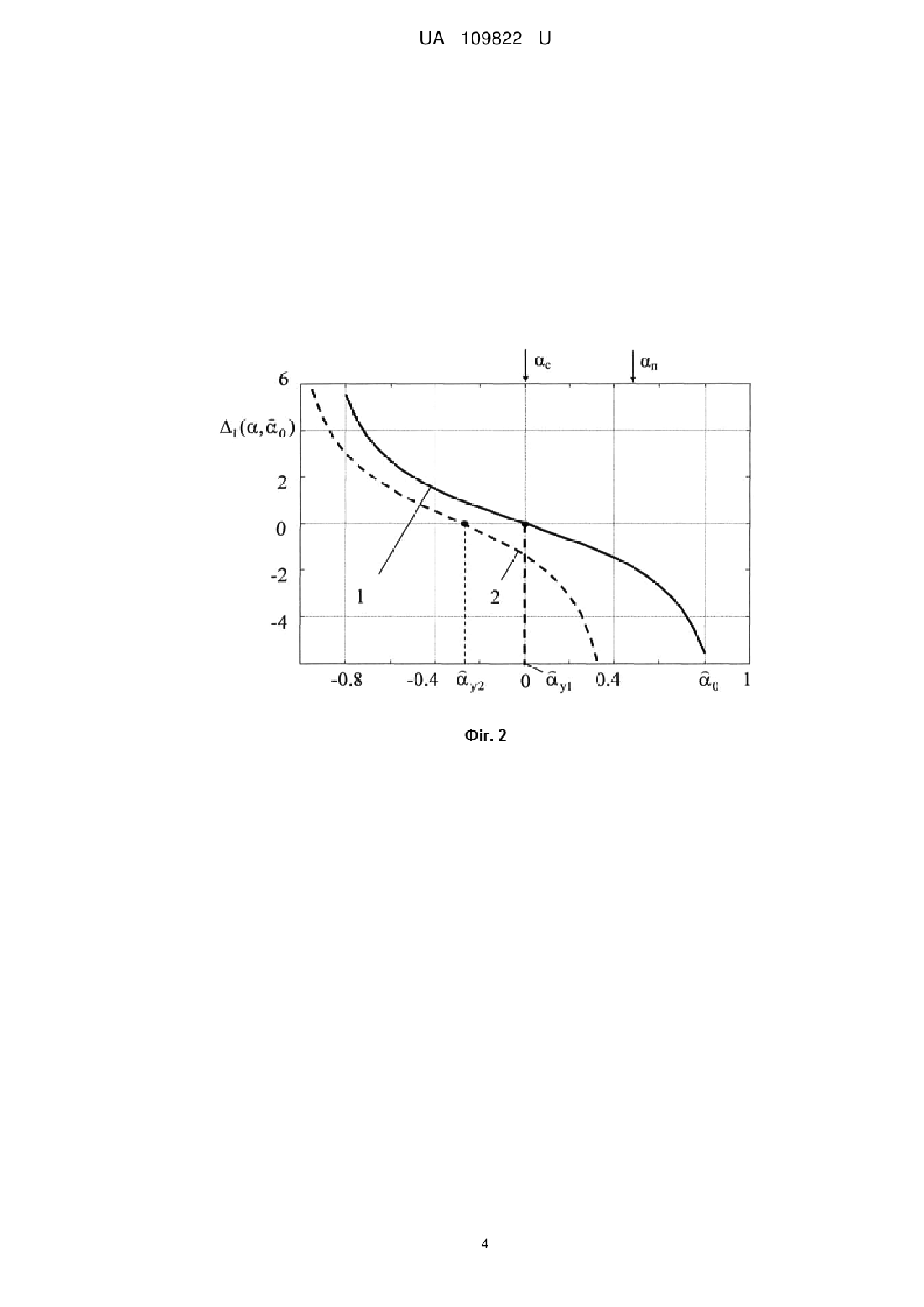
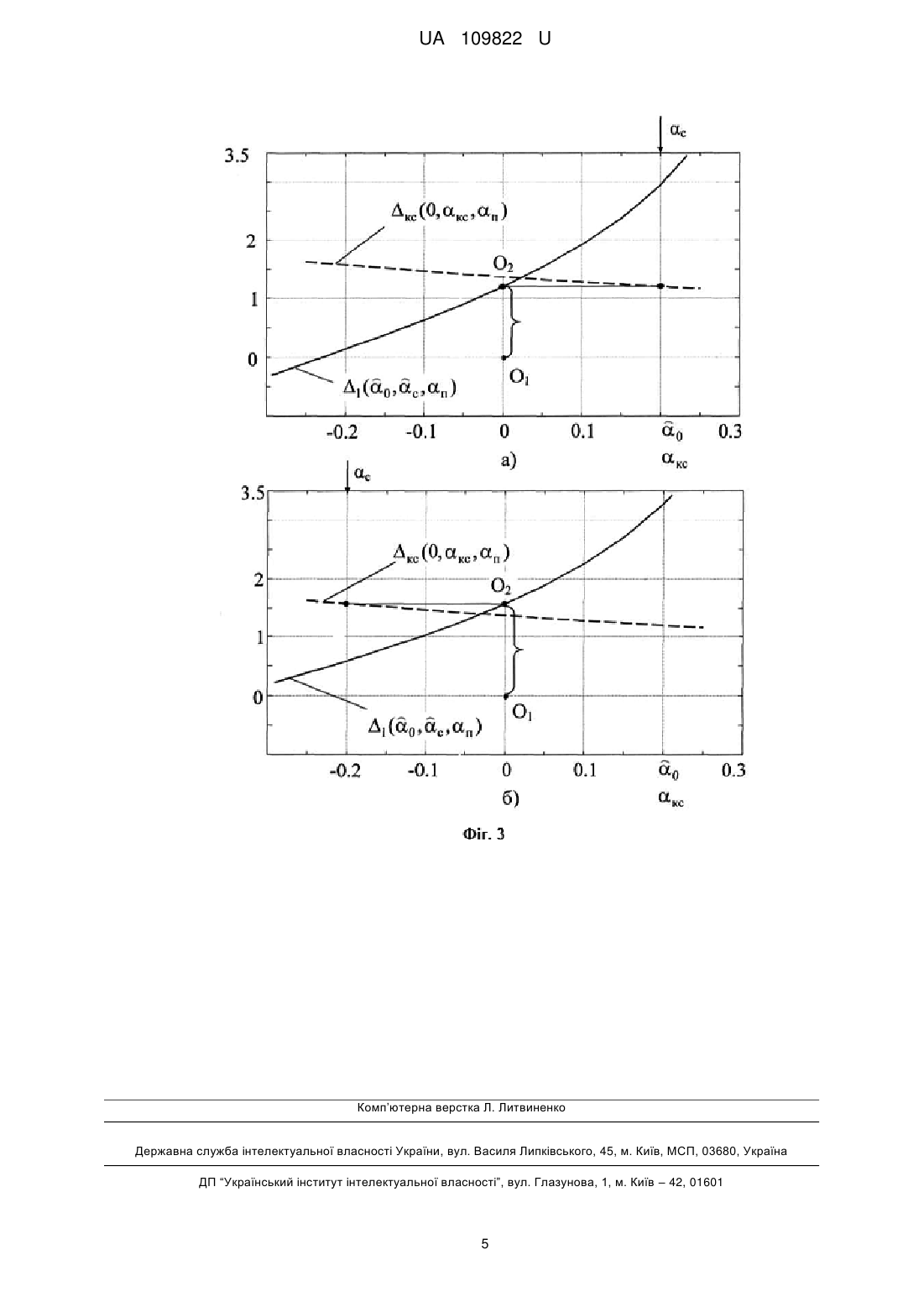
Реферат: Вимірювач кутових координат цілі оглядових моноімпульсних систем в умовах дії активних корельованих перешкод, який містить пристрій ділення і помножувач; канал формування Z 0 , який складений з послідовно з'єднаних матричного помножувача, узгодженого фільтра і квадратичного детектора; канал формування Z0 , який складений з послідовно з'єднаних матричного помножувача і узгодженого фільтра; блок адаптації, який складений з послідовно з'єднаних матричного помножувача, суматора і інтегратора, та блок адаптації, який складений з послідовно з'єднаних матричного помножувача, суматора і інтегратора, причому додатково введено канал формування Zкс , який складений з послідовно з'єднаних помножувача, узгодженого фільтра і квадратичного детектора, канал формування Zкс , який складений з послідовно з'єднаних помножувача і узгодженого фільтра, а також помножувач, пристрій ділення, блок порівняння, логічний елемент, блок формування контрольного сигналу (КС) та датчик КС. UA 109822 U (12) UA 109822 U UA 109822 U 5 10 15 20 25 30 35 40 45 50 55 Запропонована корисна модель належить до галузі радіолокації і може бути використана, зокрема, в моноімпульсних радіолокаційних станціях (РЛС) огляду простору для вимірювання кутових координат всіх об'єктів, що знаходяться в межах діаграми спрямованості та розділяються за дальністю при програмному керуванні положення променя у просторі в умовах дії зовнішніх (по відношенню до РЛС) активних корельованих перешкод. Відомий "Пристрій адаптації до дії корельованих перешкод" [1], який містить лінійну антенну решітку (АР), блок затримки сигналу, суматори та пристрій вагової обробки сигналу. Недоліком відомого пристрою є наявність систематичних похибок вимірювання напряму приймання сигналу. Найбільш близьким до запропонованого технічним рішенням, вибраним як прототип, є "Пристрій вимірювання кутових координат цілей на фоні корельованих перешкод" [2], який містить: матричні помножувачі, пристрої ділення, суматор, помножувач і блок визначення у ; канал формування Z0 , який складений з послідовно з'єднаних матричного помножувача, узгодженого фільтра і квадратичного детектора; канал формування Z0 , який складений з послідовно з'єднаних матричного помножувача і узгодженого фільтра; блок адаптації, який складений з послідовно з'єднаних матричного помножувача, суматора і інтегратора, та блок адаптації, який складений з послідовно з'єднаних матричного помножувача, суматора і інтегратора. Недоліком пристрою-прототипу є те, що незміщена оцінка, яка отримана в умовах дії перешкод по головній пелюстці діаграми спрямованості (ДС), має великий рівень середньоквадратичної похибки (СКП) вимірювання кутової координати [3] та її незміщеність забезпечується при достатньо великому значенні відношення параметра виявлення q2 . Крім того, вид дискримінаторної характеристики залежить від конкретної перешкодової обстановки, що ускладнює її попереднє градуювання і визначення напряму цілі, що знаходиться в межах нерухомої ДС решітки. В основу корисної моделі поставлена задача створити вимірювач кутових координат цілі оглядових моноімпульсних систем в умовах дії активних корельованих перешкод, який забезпечить підвищення результуючої точності вимірювання, що визначається дисперсією і зміщенням оцінки. Поставлена задача вирішується за рахунок того, що у пристрої-прототипі, який містить: матричні помножувачі, пристрої ділення, суматор, помножувач і блок визначення у ; канал формування Z0 , який складений з послідовно з'єднаних матричного помножувача, узгодженого фільтра і квадратичного детектора; канал формування Z0 , який складений з послідовно з'єднаних матричного помножувача і узгодженого фільтра; блок адаптації, який складений з послідовно з'єднаних матричного помножувача, суматора і інтегратора, та блок адаптації, який складений з послідовно з'єднаних матричного помножувача, суматора і інтегратора, вилучено матричні помножувачі, пристрій ділення, суматор і блок визначення у та додатково введено канал формування Zкс , який складений з послідовно з'єднаних помножувача, узгодженого фільтра і квадратичного детектора, канал формування Zкс , який складений з послідовно з'єднаних помножувача і узгодженого фільтра, а також помножувач, пристрій ділення, блок порівняння, логічний елемент, блок формування контрольного сигналу (КС) та датчик КС. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у забезпеченні додаткової обробки і отриманні оцінок напряму приходу контрольного сигналу для різних та відомих його значень в околиці напряму настройки нерухомої АР, компенсації систематичної похибки вимірювання кутової координати цілі та зменшенні рівня флуктуаційних похибок вимірювання для випадку дії перешкоди по головній пелюстці ДС АР. На Фіг. 1 зображена структурна схема запропонованого пристрою. На Фіг. 2 зображені дискримінаторні характеристики вимірювачів напряму приходу детермінованого сигналу. На Фіг. 3 зображені пеленгаційні характеристики каналів запропонованого пристрою. Запропонований вимірювач кутових координат цілі оглядових моноімпульсних систем в умовах дії активних корельованих перешкод містить канал формування Z0 , який складений з послідовно з'єднаних матричного помножувача 1, узгодженого фільтра 5 і квадратичного детектора 10; канал формування Z0 , який складений з послідовно з'єднаних матричного помножувача 11 і узгодженого фільтра 15; канал формування Zкс , який складений з 1 UA 109822 U 5 10 15 послідовно з'єднаних помножувача 6, узгодженого фільтра 7 і квадратичного детектора 8, канал формування Zкс , який складений з послідовно з'єднаних помножувача 16 і узгодженого фільтра 15; блок адаптації, який складений з послідовно з'єднаних матричного помножувача 2, суматора 3 і інтегратора 4; блок адаптації, який складений з послідовно з'єднаних матричного помножувача 12, суматора 13 і інтегратора 14; блок формування контрольного сигналу 21; блок порівняння 19; датчик контрольного сигналу 22, помножувачі 9 і 23, пристрої ділення 18 і 24 та логічний елемент. Робота запропонованого вимірювача кутових координат цілі оглядових моноімпульсних систем в умовах дії активних корельованих перешкод полягає у наступному (Фіг. 1). Для отримання оцінки кутової координати цілі при багатоканальному прийманні як достатня статистика для вимірювання використовується модуль вагового інтеграла: 1 T Z Y t R t, dt , (1) 2 де Yt ,Rt, - вектори-стовпці комплексних амплітуд прийнятого коливання та вагової функції відповідно; - кутова координата очікуваного сигналу; т, - знаки транспонування та комплексного спряження. 25 2 Для визначення вихідного ефекту дискримінатора Z в околиці відомого напрямку настройки АР 0 розкладається в ряд Тейлора та обмежується першими трьома членами: 2 2 1 2 2 Z Z 0 Z 0 0 Z 0 0 2 . (2) 2 Розв'язання рівняння правдоподібності має вигляд: Re( Z( 0 )Z ( 0 )) , (3) 1 у 0 ( ) 2 Z 0 - похідна вагового інтегралу де Z( 0 ) Z по при 0 ; у - текуча оцінка напряму приходу сигналу. При обробці квазідетермінованого сигналу на фоні флуктуаційних шумів оцінка напряму приходу сигналу у1 з використанням алгоритму (3) є незміщеною (Фіг. 2, крива 1). У випадку дії 30 корельованих за простором перешкод з напрямку п компенсація цього впливу призводить до викривлення результуючої характеристики спрямованості, а оцінка кутової координати є зміщеною у 2 . Суттєвим це зміщення є при дії постановників перешкод по головній пелюстці характеристики спрямованості (Фіг. 2, крива 2). При використанні Z та настройки АР в напрямку текуча оцінка напряму приходу 20 0 у сигналу визначається для заданої перешкодової обстановки в околиці 0 шляхом формування текучих оцінок напряму приходу КС у кс , які відповідають різним та відомим його значенням 35 40 кс (в межах ширини ДС). При заданій орієнтації ДС реалізується алгоритм (3) для КС та формується дискримінаторна характеристика (ДХ): Re( Z( кс )Z ( кс )) , (4) кс 2 Z( кс ) зі зміщеним нулем для відомих напрямків КС кс . У блоку порівняння відбувається зрівняння ДХ (3) і (4) 1(0 , с , п ) відповідно). У випадку рівності цих характеристик вимірювача формується текуча оцінка напряму приходу сигналу (Фіг. 3, крива кс (0, кс , п ) і (Фіг. 3, відрізок О1О2) на виході у кс . Точність отриманої оцінки значно вище точності вимірювання напряму приходу корисного сигналу, що обумовлено відсутністю зовнішніх перешкод на вході каналу КС та можливістю вибору енергії КС. 2 UA 109822 U 5 Джерела інформації: 1. Уидроу Б., Стирнз С. Адаптивная обработка сигналов: Пер. с англ. - М.: Радио и связь, 1989. - 440 с. 2. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь. 1981. - 416 с. 3. Багдасарян С.Т., Белов А.А., Рябуха В.П., Таршин В.А. Неследящее измерение в РЛС с адаптивной антенной решеткой информативных параметров сигнала со случайными амплитудой и начальной фазой на фоне помех. – М.: ИПРЖ, Антенны. - 2000. - № 2(45). - С. 7883. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Вимірювач кутових координат цілі оглядових моноімпульсних систем в умовах дії активних корельованих перешкод, який містить пристрій ділення і помножувач; канал формування Z 0 , який складений з послідовно з'єднаних матричного помножувача, узгодженого фільтра і квадратичного детектора; канал формування Z0 , який складений з послідовно з'єднаних матричного помножувача і узгодженого фільтра; блок адаптації, який складений з послідовно з'єднаних матричного помножувача, суматора і інтегратора, та блок адаптації, який складений з послідовно з'єднаних матричного помножувача, суматора і інтегратора, який відрізняється тим, що додатково введено канал формування Zкс , який складений з послідовно з'єднаних помножувача, узгодженого фільтра і квадратичного детектора, канал формування Zкс , який складений з послідовно з'єднаних помножувача і узгодженого фільтра, а також помножувач, пристрій ділення, блок порівняння, логічний елемент, блок формування контрольного сигналу (КС) та датчик КС. 3 UA 109822 U 4 UA 109822 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 13/06
Мітки: активних, систем, корельованих, умовах, перешкод, цілі, оглядових, кутових, моноімпульсних, вимірювач, дії, координат
Код посилання
<a href="https://ua.patents.su/7-109822-vimiryuvach-kutovikh-koordinat-cili-oglyadovikh-monoimpulsnikh-sistem-v-umovakh-di-aktivnikh-korelovanikh-pereshkod.html" target="_blank" rel="follow" title="База патентів України">Вимірювач кутових координат цілі оглядових моноімпульсних систем в умовах дії активних корельованих перешкод</a>
Вимірювач кутових координат цілі в умовах дії активних корельованих перешкод

Номер патенту: 21683
Опубліковано: 15.03.2007
Автори: Таршин Володимир Анатолійович, Васильєв Вадим Анатолійович
МПК: G01S 13/06
Мітки: перешкод, умовах, активних, кутових, дії, вимірювач, корельованих, координат, цілі
Формула / Реферат:
Вимірювач кутових координат цілі в умовах дії активних корельованих перешкод, що містить основний канал, в якому послідовно з'єднані помножувач, перший узгоджений фільтр та перший детектор, блок адаптації, в якому послідовно з'єднані помножувач, суматор, другий вхід якого є входом очікуваного сигналу, та інтегратор, вихід якого з'єднаний з першим входом матричного помножувача та першим входом помножувача основного каналу, другий вхід якого є...
Наземний вимірювач кутових координат цілі
Номер патенту: 17671
Опубліковано: 15.03.2002
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: кутових, цілі, наземний, вимірювач, координат
Формула / Реферат:
Наземный измеритель угловых координат цели, содержащий передатчик непрерывного синусоидального сигнала, антенную систему, состоящую из передающей антенны и двух приемных антенн, двух приемников и фазометра, отличающийся тем, что антенная система выполнена в виде двух ярусов, в нижнем ярусе размещены передающая антенна и две приемных, а в верхнем ярусе - две другие приемные антенны, приемные антенны расположены симметрично относительно...
Спосіб визначення кутових координат цілі і пристрій для його реалізації
Номер патенту: 74230
Опубліковано: 15.11.2005
Автори: Черняк Сергій Іванович, Бузанов Віктор Іванович, Попов Віктор Гаврилович
МПК: F41G 3/22
Мітки: спосіб, кутових, пристрій, цілі, реалізації, визначення, координат
Формула / Реферат:
1. Спосіб визначення кутових координат цілі за допомогою нашоломної системи цілеуказання з нерухомою міткою у візирному пристрої, який включає фіксацію положення візирної лінії шляхом суміщення нерухомої мітки з ціллю та визначення кутових координат візирної лінії, що відповідають кутовим координатам цілі, який відрізняється тим, що за допомогою додаткової рухомої мітки фіксують кут непогодження між положенням візирної лінії, що визначається...
Спосіб вимірювання кутових координат цілі
Номер патенту: 13420
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Бахвалов Борис Миколайович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: координат, цілі, спосіб, вимірювання, кутових
Формула / Реферат:
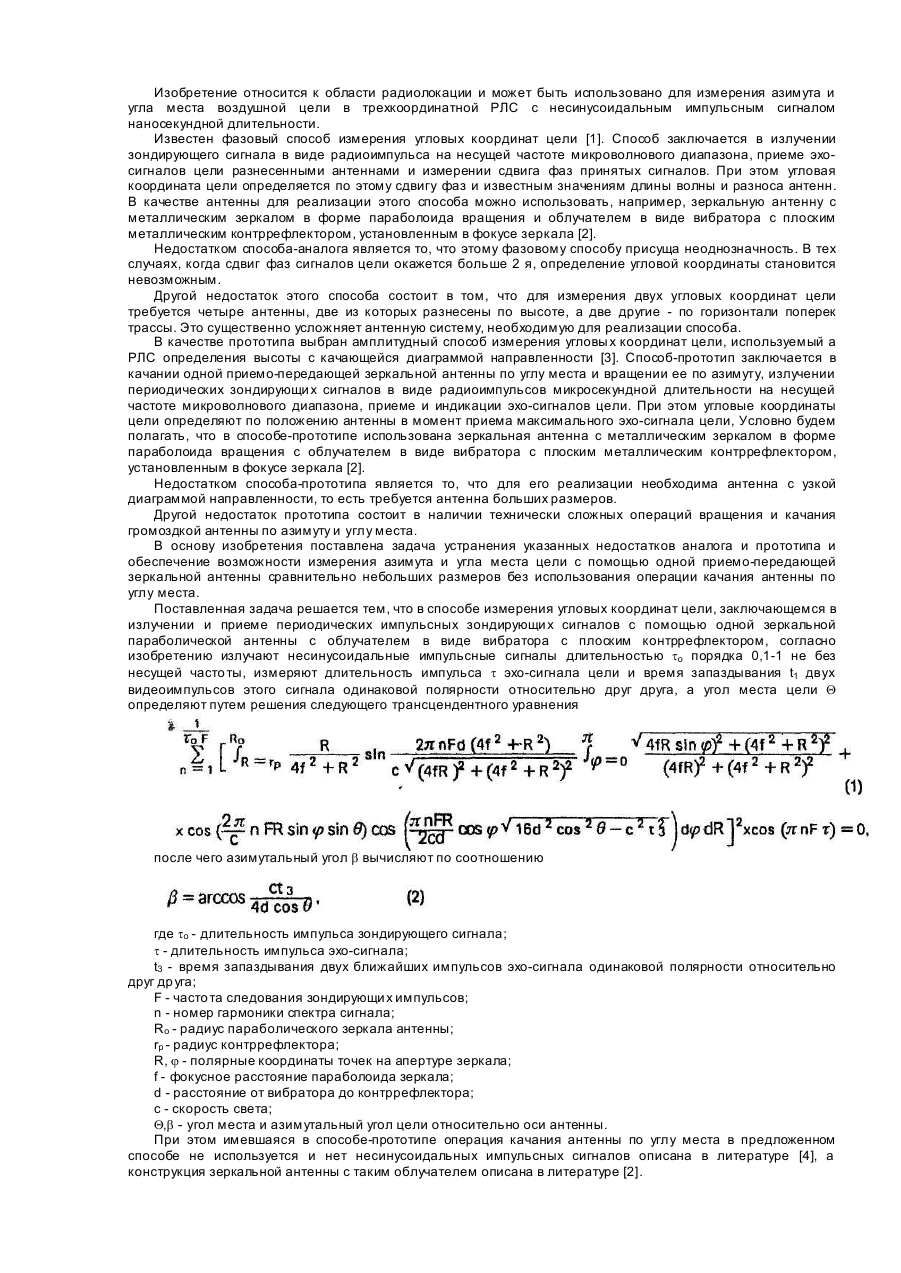
Способ измерения угловых координат цели, заключающийся в излучении и приеме периодических импульсных зондирующих сигналов с помощью одной зеркальной параболической антенны с облучателем в виде вибратора с плоским контррефлектором, отличающийся тем, что излучают несинусоидальные импульсные сигналы длительностью t0 порядка 0,1-1 нс без несущей частоты, измеряют длительность импульса t эхо-сигнала цели и время запаздывания t3 двух...
Радіолокаційний фазовий вимірювач кутових координат із бе3упинним випромінюванням
Номер патенту: 40133
Опубліковано: 16.07.2001
Автори: Бахвалов Валентин Борисович, Порошин Сергій Михайлович
МПК: G01S 3/14
Мітки: кутових, координат, фазовий, вимірювач, бе3упинним, радіолокаційний, випромінюванням
Формула / Реферат:
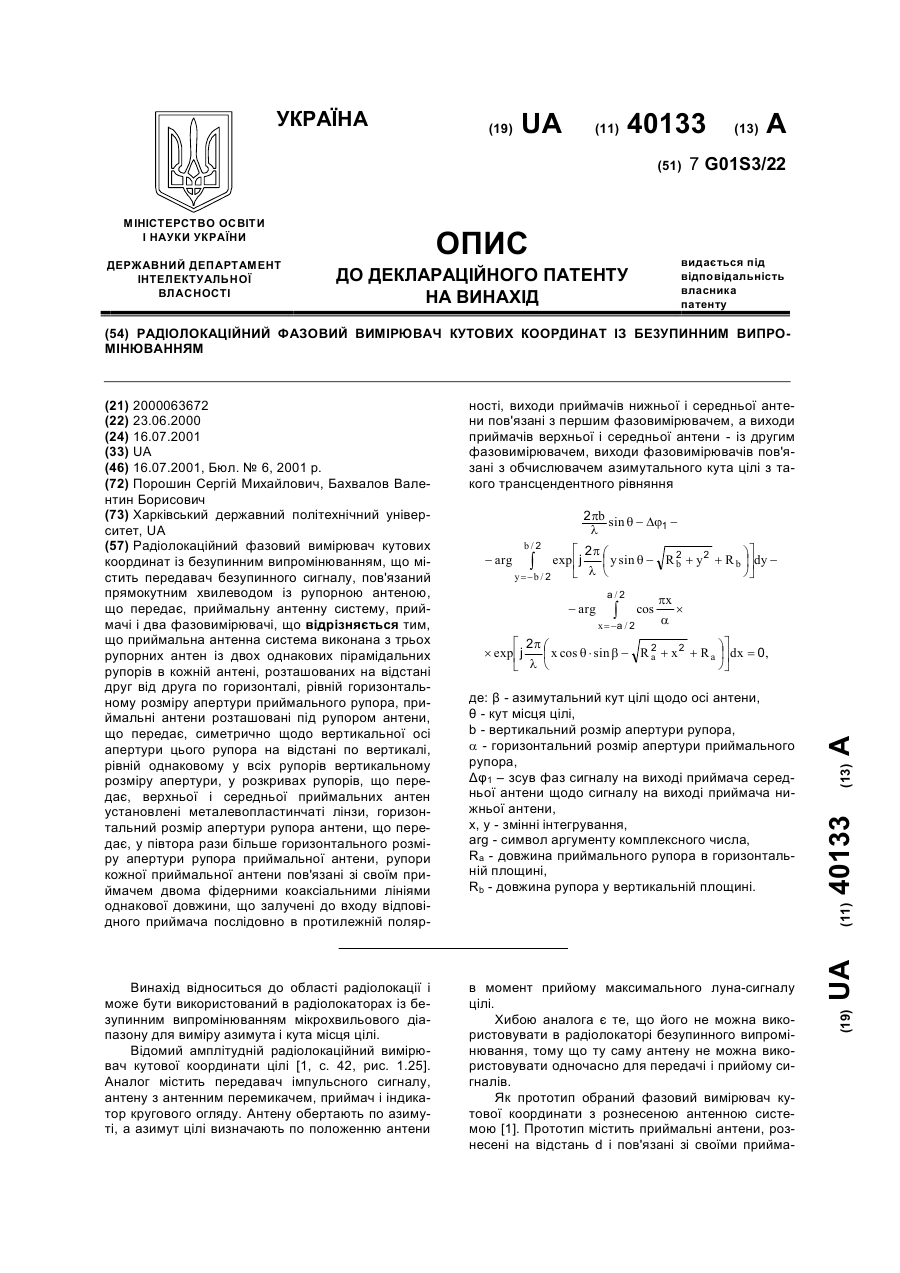
Радіолокаційний фазовий вимірювач кутових координат із безупинним випромінюванням, що містить передавач безупинного сигналу, пов'язаний прямокутним хвилеводом із рупорною антеною, що передає, приймальну антенну систему, приймачі і два фазовимірювача, що відрізняються тим, що приймальна антенна система виконана з трьох рупорних антен із двох однакових пірамідальних рупори в кожній антені, розташованих на відстані друг від друга по...
Попередній патент: Гвинтовий розходомір транспортних засобів
Наступний патент: Система електропостачання шестиелектродної дугової електропечі з пасивним керованим фільтром струмів вищих гармонік
Випадковий патент: Інерційний конвеєр