Вимірювач кутових координат цілі в умовах дії активних корельованих перешкод
Номер патенту: 21683
Опубліковано: 15.03.2007
Автори: Таршин Володимир Анатолійович, Васильєв Вадим Анатолійович


Формула / Реферат
Вимірювач кутових координат цілі в умовах дії активних корельованих перешкод, що містить основний канал, в якому послідовно з'єднані помножувач, перший узгоджений фільтр та перший детектор, блок адаптації, в якому послідовно з'єднані помножувач, суматор, другий вхід якого є входом очікуваного сигналу, та інтегратор, вихід якого з'єднаний з першим входом матричного помножувача та першим входом помножувача основного каналу, другий вхід якого є входом пристрою та з'єднаний з першим входом помножувача блока адаптації, другий вхід якого з'єднаний з виходом помножувача основного каналу, а також перший блок оцінки, який відрізняється тим, що додатково введені послідовно включені другий узгоджений фільтр, другий детектор, другий блок оцінки, а також блок порівняння, перший та другий суматори, логічний елемент, датчик та блок формування контрольного сигналу, при цьому вихід першого детектора основного каналу з'єднаний з входом першого блока оцінки, вихід якого з'єднано з першими входами першого суматора та блока порівняння, вихід якого з'єднаний з першим входом логічного елемента, вихід датчика контрольного сигналу з'єднаний з першим входом другого суматора та входом блока формування контрольного сигналу, вихід якого підключений до другого входу матричного помножувача, вихід якого з'єднаний з входом другого узгодженого фільтру, вихід другого блока оцінки з'єднаний з другими входами блока порівняння та другого суматора, вихід якого через другий вхід і вихід логічного елемента з'єднаний з другим входом першого суматора, вихід якого є виходом пристрою.
Текст
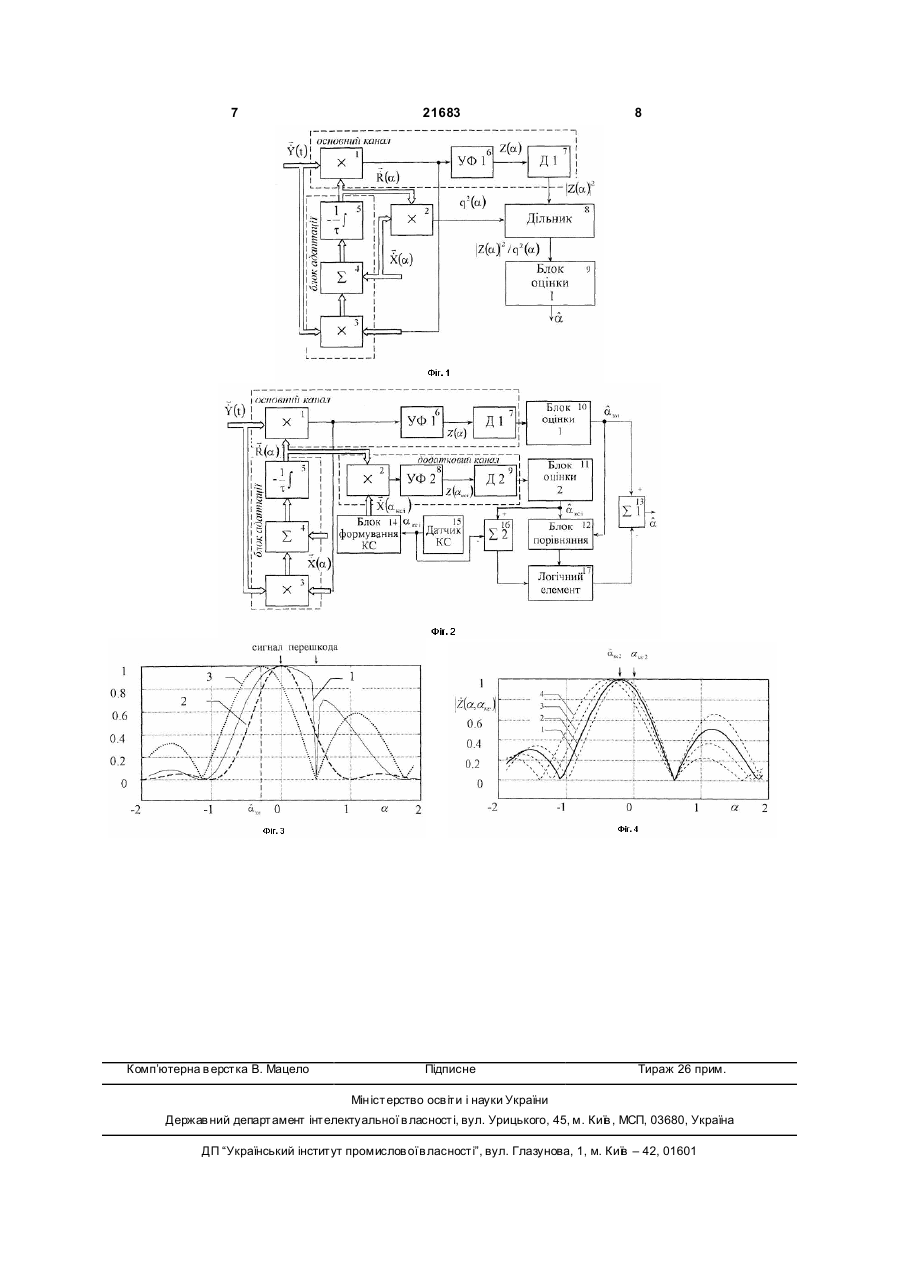
Вимірювач кутових координат цілі в умовах дії активних корельованих перешкод, що містить основний канал, в якому послідовно з'єднані помножувач, перший узгоджений фільтр та перший детектор, блок адаптації, в якому послідовно з'єднані помножувач, суматор, другий вхід якого є входом очікуваного сигналу, та інтегратор, вихід якого з'єднаний з першим входом матричного помножувача та першим входом помножувача основного каналу, др угий вхід якого є входом пристрою та з'єднаний з першим входом помножувача блока адаптації, другий вхід якого з'єднаний з виходом помножувача основного каналу, а також перший U 1 3 21683 4 ви ходом помнож ува ча о сно вно го кана лу. Ви хід Технічний результат, який може бути отримадетектора є виходом основного каналу та з'єднаний при здійсненні корисної моделі полягає у заний з першим входом дільн ик а , др уги й вхі д безпеченні додатко вої обробки та о триманні я ко го п і дк лючен и й до ви хо ду м а тр и чно го оцінок напряму при ходу контрольного сигналу помножувача, а ви хід підключений до входу першо(КС) для різни х і відомих його положень. Це дого блоку оцінки. Пристрій заб езпе чує о тримання зволяє компенсувати систематичну похибку та незмі щено ї оцінки напрям у при ходу кори сно го підвищити результуючу точність вимірювання насигналу на виході першого блоку оцінки за максипряму приходу корисного сигналу в умовах дії просторово корельованих перешкод особливо в мемумом відношення |Z( a )|2 q2( a ) при дії корельоважах основного пелюстка ДС АР. них перешкод в межах та за межами головної пеНа Фіг.1 приведена структурна схема прилюстки ДС АР (Фіг.1). строю-прототипу. Недоліком пристрою-прототипу є те , що неНа Фіг.2 приведена структурна схема запропозміщена оцінка, яка отримана в умовах дії перенованого пристрою. шкод по головній пелюстці ДС, має великий рівень На Фіг.3 зображені нормовані за максимальним середньоквадратичної похибки (СКП) вимірюванзначенням статистики вимірювання корисного сигня кутової координати [3] і, в силу прийнятого приналу. пущення при його синтезі, він ефективно функціоНа Фіг.4 приведені нормовані за максимальним нує при достатньо великих відношеннях сигналзначенням статистики вимірювання контрольного перешкода. сигналу. В основу корисної моделі поставлена задача Запропонований вимірювач кутових координат створити вимірювач кутових координа т ці лей в цілей в умовах дії на РЛС активних маскувальних умо ва х ді ї ак ти вни х корельован и х пере шко д, корельованих перешкод містить: блок адаптації до який за безп е чи ть п і д ви ще нн я р ез уль туючо ї перешкодови х коливань у складі послі довно то чн о сті вим ір юва нн я , як а визначається і дисз'єднани х помнож ува ча 3, суматора 4, інтегратоперсією, і зміщенням оцінки напряму приходу корира 5; основний канал вимірювання у складі послісного си гн алу з а ра хун ок вик ор истан ня до дадовно з 'єдна ни х п омнож ува ча 1 , пер шо го уз тк о во ї і н форм аці ї по да ним вимірювання го джен о го фі ль тр а 6 , пе р шо го де тек тора 7 ; напряму приходу контрольного сигналу (пілотдоп оміжн ий ка на л у ск ла ді фун кціон а льно сигналу). і ден ти чни х основному каналу елементів 2, 8, 9 Поставлена задача вирішується за рахунок товідповідно; перший 10 та другий 11 блоки о цінки , го, що у відомий пристрій вимірювання кутових блок форм ування КС 1 4 , п ер ши й 1 3 та др угий координат цілей в умовах дії активних корельованих п ере шко д, що місти ть осно вний кана л, в 1 6 сум а тори , блок порівняння 12 та логічний r яком у по слідо вн о з 'єднані помножувач, перший & елемент 17. Прийняте коливання U (t ) , яке містить узгоджений фільтр та перший детектор, блок адаптації, в яком у послі до вно з 'єднан і п омнож укорисний сигнал, корельовано перешкоду та внутрішній шум, від елементів .а н те нн о ї р е ші тки ва ч, сума тор др угий вхі д яко го є входом очікуп о с туп а є н а п ом нож ува ч 1 о сн о вно го ка на ваного сигналу, та інтегратор, вихід якого з'єднаний лу та помножувач 3 блоку адаптації. До виходу з першим входом матричного помножувача та пепомножувача 1 приєднані другий вхі д помн ож уршим входом помножувача основного каналу, др ува ча 3 та вхі д пе р шо го уз годже но го фі ль тра гий вхід якого є входом пристрою та з'єднаний з 6 . Ви хід помножува ча 3 при єднан ий до пе р шопершим входом помножувача блоку а даптаці ї, го вхо ду сума тора 4 , на др угий вхід якого подругий вхід якого з'єднаний з ви ходом помножуr вача основного каналу, а також перший блок & ступає о чікуваний сигнал C(a) . Ви хід суматора оцінки, додатково введені послідовно включені 4 приєднаний до входу інтегратора 5, ви хід якого другий узгоджений фільтр, др угий де тектор, друпідключений до другого входу помножувача 1 та гий блок оцінки, а також блок порівняння, перший першого входу матричного помножувача 2. Вихід та другий суматори, логічний елемент, датчик та блоку формування КС 14 приєднаний до другого блок формування контрольного сигналу, при входу матричного помножувача 2, вихід якого підцьом у ви хі д пе р шо го де тек тора осно вно го каключений до входу др угого узгодженого фільтра 8. на лу з 'єднан ий з вхо дом першого блоку оцінки, Вихід датчика КС15 підключений до входу блоку вихід якого з'єднано з першими входами першого формування КС14 та до першого входу другого суматора та блок у порі вняння, ви хі д якого з'єдсуматора 16. Виходи першого 6 та др угого 8 узгонаний з першим входом логічного елементу, вихід джених фільтрів відповідно підключені до входів датчика контрольного сигналу з'єднаний з першим першого та друго го детекторів 7 та 9, виходи яких вхо дом др уго го сум а тор а та вхо дом блок у з'єднані з входами першого та др уго го блоків фо рм ування кон тро льно го си гн а лу, ви хі д оцінки 10 та 11 відповідно. Ви хід др уго го блок у я ко го п і дк лючен и й до др уго го вхо ду м а тр и оцінки 11 підключений до пер шо го входу блок у чн о го помножувача, ви хід якого з'єднаний з вхопорівняння 12 та другого входу другого суматора дом другого узгодженого фільтру, ви хід др угого 16, вихід якого з'єднаний з першим входом логічблоку оцінки з'єднаний з другими входами блока ного елемента 17. Вихід першого блоку оцінки 10 порівняння та др уго го сум а тор а, ви хі д яко го підключени й до др уго го входу блок у п орі внянчер ез др угий вхі д і ви хід ло гі чно го елемен ту ня 12 та першо го вхо ду першого суматора 13, з 'єдна ний з др угим входом пер шо го сума тора , другий вхід якого підключений до виходу логічного ви хід яко го є виходом пристрою. е леме н та 1 7 . Ви хі д блок у п орі вня ння 1 2 пі д 5 21683 6 ключен ий до др уго го входу логі чно го елемента r r 1 ¥& & 17. Ви хо дом на якому отрим ують незміщен у & Z (a , aКСі ) = YКСіT () R* t, a dt , t ( ) (2) ) 2 ò оцінку кутової координати a , є вихід першого су-¥ матора 13. r & Робота запропонованого пристрою полягає в де YКСі (t ) - век тор -сто впець сум и комплек наступному. сни х амплітуд КС для фіксованого відомого Для о тримання незміщено ї о цінки куто во ї напряму a ксі, і =1 .. .n та вн утрі шнього шум у; координати ці лі при ба га то к а на ль ном у п ри r & й ма нн і у я ко сті до ста тньо ї ста ти стики для R(t, a ) - ва го ви й ве к то р , я к и й о тр и ма н ий вимірювання використо вується порівняно просв п р и стр о ї а да п та ці ї та викори сто вується та стати стика у ви гля ді квадра та модуля ва гоодноча сно у осно вном у та до да тковом у канаво го інтегра ла ла х. 2 Максимуми контрольних статистик ¥ r 2 1 rT &* & 2 (1) , Z(a) = ) & ò U ()t R ( t, a dt Z (a, aКСі ) також зміщені, причому змі щення 2 -¥ r r & & де Y(t ) , R(t, a ) - век тор и -сто впц і комп лек сн и х а мп лі туд п р ий ня то го коливання та ва гово ї век тор-функці ї ві дповідно ; a - напрям п ри ходу о чік уван о го си гна лу; т, * - знаки тр анспон ування та комплексно го спряження . П ри о бро бці к ваз іде термін о вано го си гна лу н а фоні флук туаційн и х шумів оцінка напряму приходу сигналу на ви хо ді блоку 10 за максимумом (1) є незміщено ю (Фі г.3, крива 2) [2]. У випа дк у ді ї корельо ван и х за про стором акти вни х маск увальни х п е р е шк о д та а да п ти вн о ї ї х к о м п е н са ці ї м а є м і сце ви кр и вле н н я результуючо ї харак теристики спрямовано сті та ) зміщення оцінки куто вої координа ти a ЗМ за її максимумом. Особли во помі тним це змі щення є при дії постановників перешкод в межах головної пелюстки характеристики спрямованості (Фі г.3, крива 3). Однак в о бла сті максим ум у кри визна бі ль ша н іж у ви па дк у о тр им ан ня оці нки за м ак сим умо м |Z( a )2 q2( a ) (Фі г.3 , кри ва 1) і забезпе чує мен шу ди спер сі ю або С КП . Рез ультуюча о ці нк а , я ка вк люча є з м і ще н н я і С КП для з м і ще н о ї о ці нк и в ці ло м у є біль шою ніж оцінка за максим умом |Z( a )2 q2( a ). Підви щення рез уль туючо ї то чності вимірювання при дії перешкод в межах го ловно ї пе люстки ДС АР до сяга ється компенсацією си стематично ї по хибки зміщено ї о цінки, що здійснюється за допомогою дода тково введени х блоків та елементів. Для цього у додатко вому каналі, як ий вк люча є п о слідо вн о з 'єднан і м атр и чн ий пом нож ува ч, др уги й узгоджений філь тр та др угий де тектор на заданому фоні корельованих пере шко д здійснюється форм ування набор у кон трольни х ста ти стик 2 & Z (a, aКСі ) для різни х і відоми х напрямів прихо ду КС у ві дпові дності з виразом & максимуму одні єї з п стати стик Z(a, aКСі) , аналогі чно змі щенню ста ти стики (1) для даної вхідr & ної реалізаці ї Y(t ) . Цьому випадк у відпо ві дає позначена суці льною лін ією ста тистика 2 & Z (a, aКС2 ) для напрям у приходу a кс2 (Фіг.4). ) Положенню максимуму a КС2 контрольної ста тистики відпо ві да є ві доми й н апрям прий ом у к он троль но го си гн алу a кс2, що доз воля є оціни ти вели чин у змі щення (система ти чн у по хи бк у) ) М = aКС - aКС , (3) ) Незмі щен у оцінк у к уто во го нап рям у a мо жна о тр има ти у ви гляді (4 ) ) ) a = a ЗМ - Мa , (4) Ве ли чин а зм і щенн я фо рм уєть ся н а ви хо ді сума тора 16 (Фі г.2) і пр и викон анні умо ви ) ) aЗМ - aКСі £ e чер ез ло гі чний е леме н т 17 ви да ється н а сума тор 13 для о триман ня н езмі щено ї оці нки а . Ве ли чи на є з адаєть ся на порядок менше заданої точно сті вимірювання. Джерела інформації 1. Уидро у Б., С тирнз С . Адапти вная обрабо тка сигна лов: Пер . с англ. - М.: Радио и связь, 1989. - с.356-357. 2. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь. 1981 . - с.366367. 3. Ба гда сарян С Т., Бе ло в А.А., Ря буха В.П ., Та р шин В.А. Неследя щее измерение в РЛС с адап тивной ан тенной реше ткой информативны х параметров сигнала со случайными амплитудой и начальной фазой на фоне помех. - // Антенны.- 2000. - №2 (42). с.78. 7 Комп’ютерна в ерстка В. Мацело 21683 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measurement of angular coordinates of target under condition of effect of active correlated obstacles
Автори англійськоюVasyliev Vadym Anatoliiovych, Tarshyn Volodymyr Anatoliovych
Назва патенту російськоюИзмеритель угловых координат цели в условиях действия активных коррелированных преград
Автори російськоюВасильев Вадим Анатолиевич, Таршин Владимир Анатолиевич
МПК / Мітки
МПК: G01S 13/06
Мітки: кутових, координат, перешкод, активних, корельованих, вимірювач, цілі, умовах, дії
Код посилання
<a href="https://ua.patents.su/4-21683-vimiryuvach-kutovikh-koordinat-cili-v-umovakh-di-aktivnikh-korelovanikh-pereshkod.html" target="_blank" rel="follow" title="База патентів України">Вимірювач кутових координат цілі в умовах дії активних корельованих перешкод</a>
Наземний вимірювач кутових координат цілі
Номер патенту: 17671
Опубліковано: 15.03.2002
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: кутових, цілі, координат, наземний, вимірювач
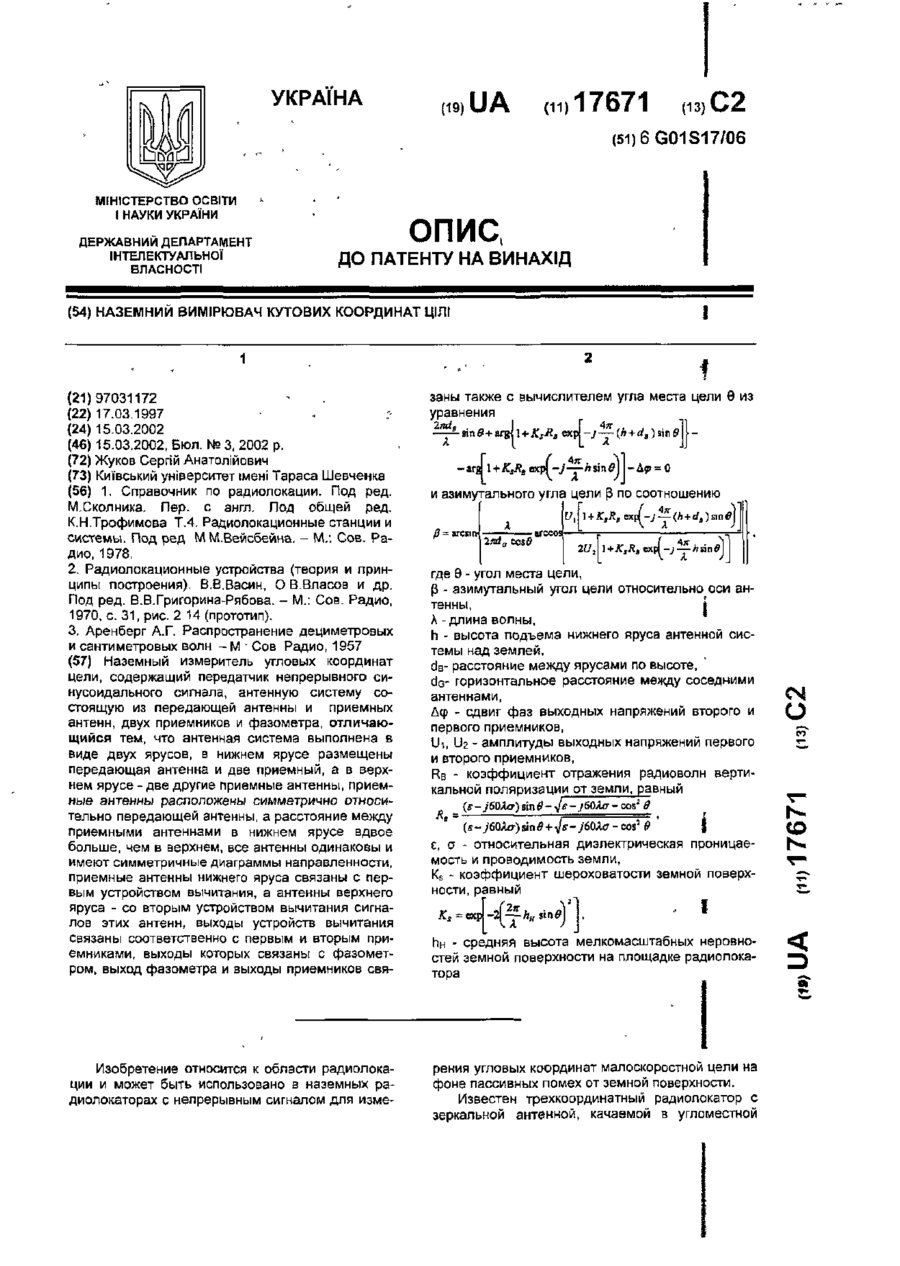
Формула / Реферат:
Наземный измеритель угловых координат цели, содержащий передатчик непрерывного синусоидального сигнала, антенную систему, состоящую из передающей антенны и двух приемных антенн, двух приемников и фазометра, отличающийся тем, что антенная система выполнена в виде двух ярусов, в нижнем ярусе размещены передающая антенна и две приемных, а в верхнем ярусе - две другие приемные антенны, приемные антенны расположены симметрично относительно...
Радіолокаційний фазовий вимірювач кутових координат із бе3упинним випромінюванням
Номер патенту: 40133
Опубліковано: 16.07.2001
Автори: Порошин Сергій Михайлович, Бахвалов Валентин Борисович
МПК: G01S 3/14
Мітки: фазовий, радіолокаційний, бе3упинним, координат, вимірювач, кутових, випромінюванням
Формула / Реферат:
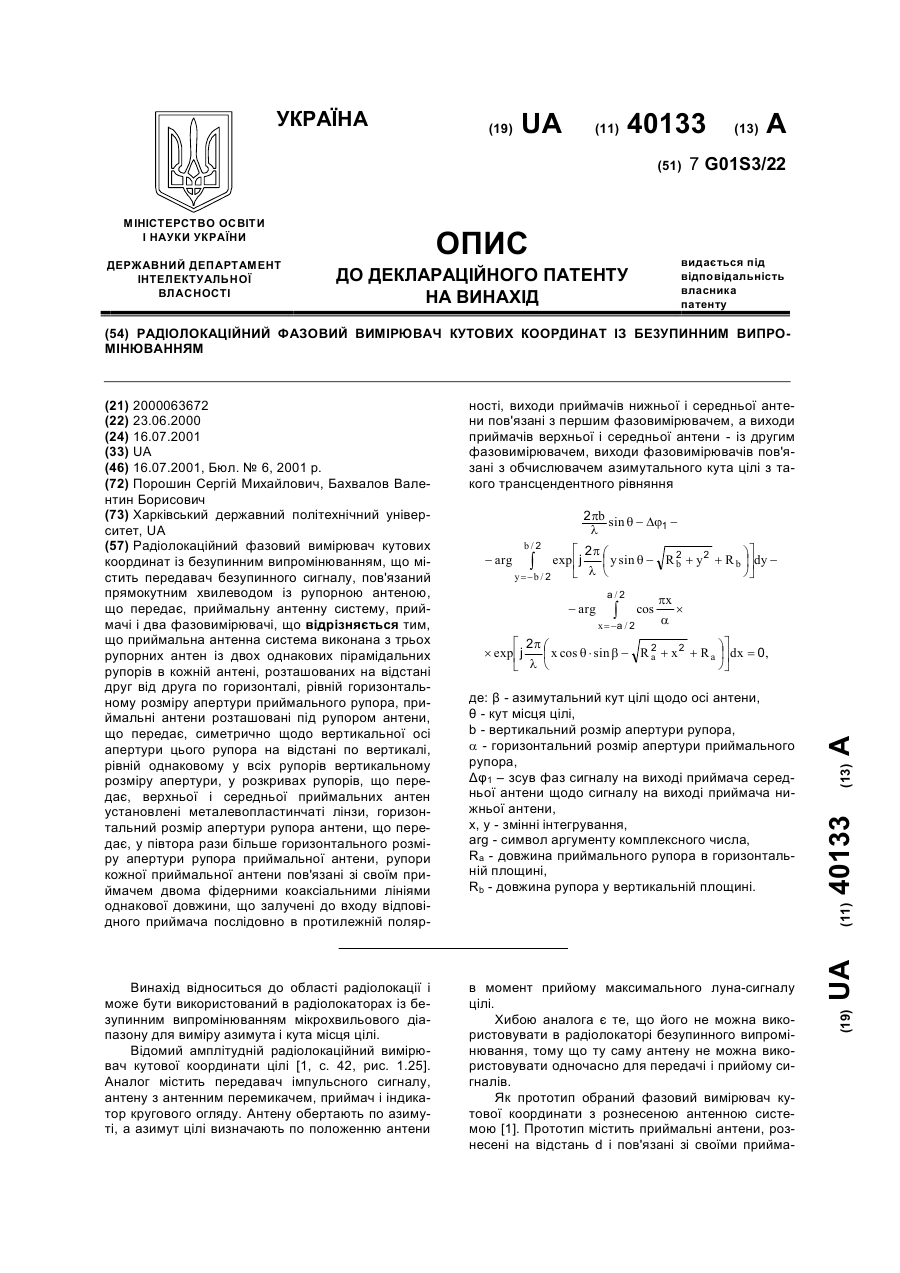
Радіолокаційний фазовий вимірювач кутових координат із безупинним випромінюванням, що містить передавач безупинного сигналу, пов'язаний прямокутним хвилеводом із рупорною антеною, що передає, приймальну антенну систему, приймачі і два фазовимірювача, що відрізняються тим, що приймальна антенна система виконана з трьох рупорних антен із двох однакових пірамідальних рупори в кожній антені, розташованих на відстані друг від друга по...
Спосіб вимірювання кутових координат цілі
Номер патенту: 13420
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: кутових, спосіб, координат, цілі, вимірювання
Формула / Реферат:
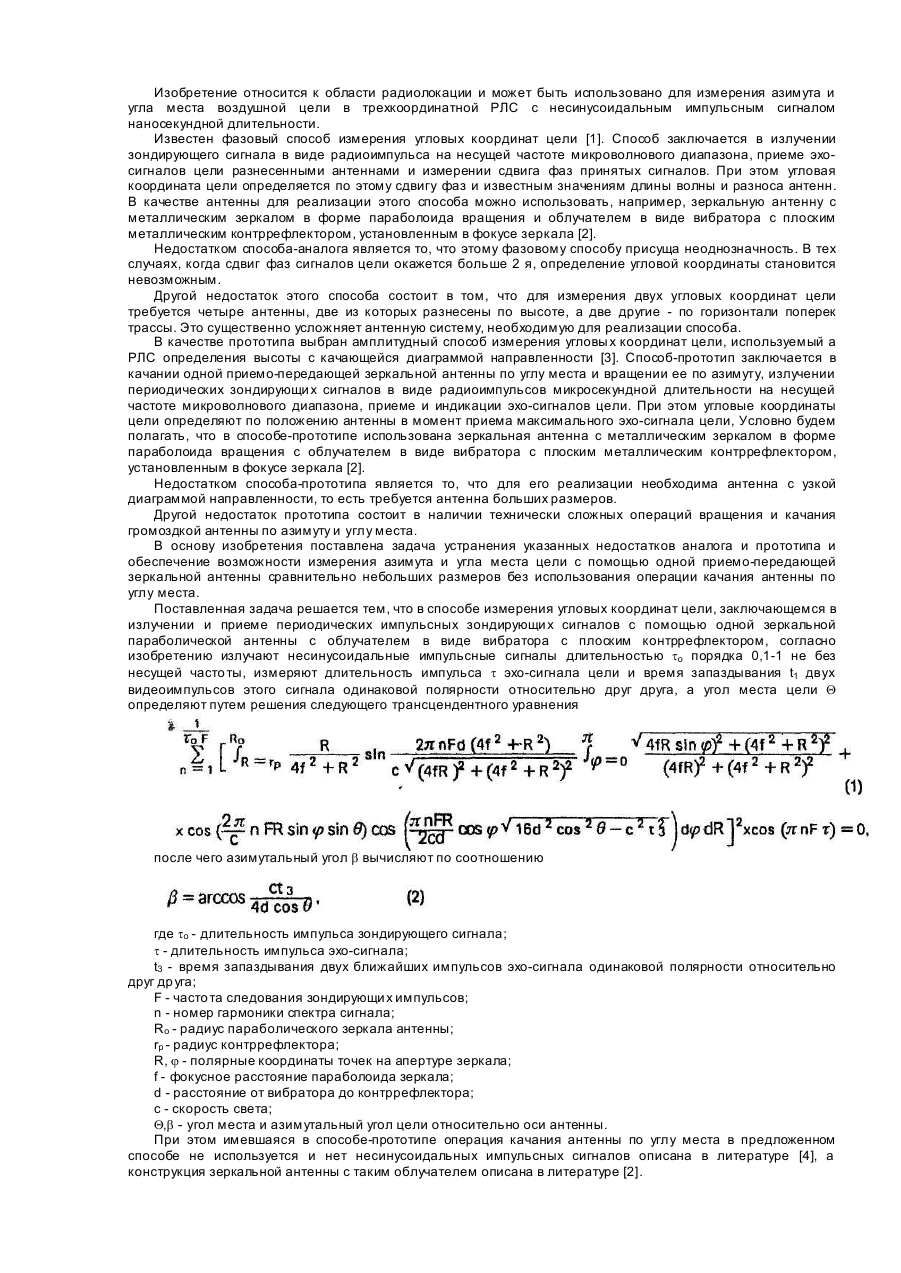
Способ измерения угловых координат цели, заключающийся в излучении и приеме периодических импульсных зондирующих сигналов с помощью одной зеркальной параболической антенны с облучателем в виде вибратора с плоским контррефлектором, отличающийся тем, что излучают несинусоидальные импульсные сигналы длительностью t0 порядка 0,1-1 нс без несущей частоты, измеряют длительность импульса t эхо-сигнала цели и время запаздывания t3 двух...
Спосіб визначення кутових координат цілі і пристрій для його реалізації
Номер патенту: 74230
Опубліковано: 15.11.2005
Автори: Бузанов Віктор Іванович, Попов Віктор Гаврилович, Черняк Сергій Іванович
МПК: F41G 3/22
Мітки: пристрій, цілі, спосіб, кутових, визначення, реалізації, координат
Формула / Реферат:
1. Спосіб визначення кутових координат цілі за допомогою нашоломної системи цілеуказання з нерухомою міткою у візирному пристрої, який включає фіксацію положення візирної лінії шляхом суміщення нерухомої мітки з ціллю та визначення кутових координат візирної лінії, що відповідають кутовим координатам цілі, який відрізняється тим, що за допомогою додаткової рухомої мітки фіксують кут непогодження між положенням візирної лінії, що визначається...
Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора
Номер патенту: 13419
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: вимірювання, кутових, радіолокатора, секвентного, наземного, цілі, координат, спосіб
Формула / Реферат:
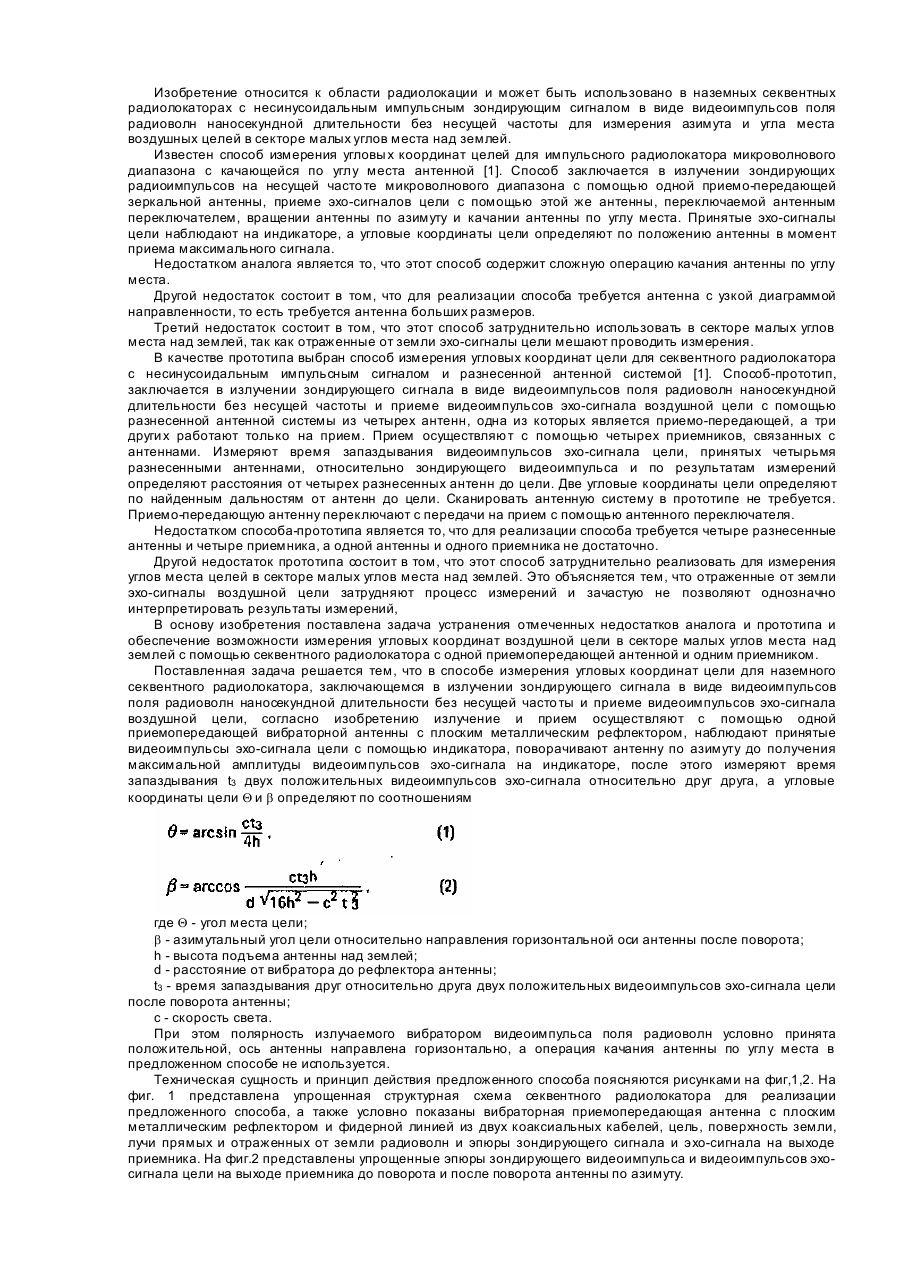
Способ измерения угловых координат цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты и приеме видеоимпульсов эхо-сигнала воздушной цели, отличающийся тем, что излучение и прием осуществляют с помощью одной приемо-передающей вибраторной антенны с плоским металлическим рефлектором, наблюдают принятые видеоимпульсы...
Попередній патент: Залізнична платформа для великотоннажних вантажів
Наступний патент: Двохелектродний вузол
Випадковий патент: Спосіб визначення розподілу домішок в об'ємі монокристала