Спосіб управління гнучкою трубкою для ендоскопії і пристрій для його здійснення
Номер патенту: 111942
Опубліковано: 11.07.2016
Автори: Бабаджанян Аркадій Аршавірович, Бабаджанян Аршак Аркадійович
Формула / Реферат
1. Спосіб управління трубкою, який включає два і більше керовані рівні, який відрізняється тим, що управління кожним рівнем здійснюють одночасно з протилежною дією відносно напряму вигину керованого рівня, силою, що діє на наступний сусідній рівень управління в точці початкової площини перерізу цього рівня, а спільне управління групою з декількох рівнів здійснюють взаємозалежною дією на керовану групу, одночасно з протилежною дією відносно напряму вигину останнього рівня керованої групи, що силоміць діє на наступний сусідній рівень управління в точці початкової площини перерізу цього рівня.
2. Спосіб за п. 1, який відрізняється тим, що вплив на будь-який рівень управління створюється сумарною дією двох, трьох і більше сил, діючих в різних точках початкової площини перерізу цього рівня.
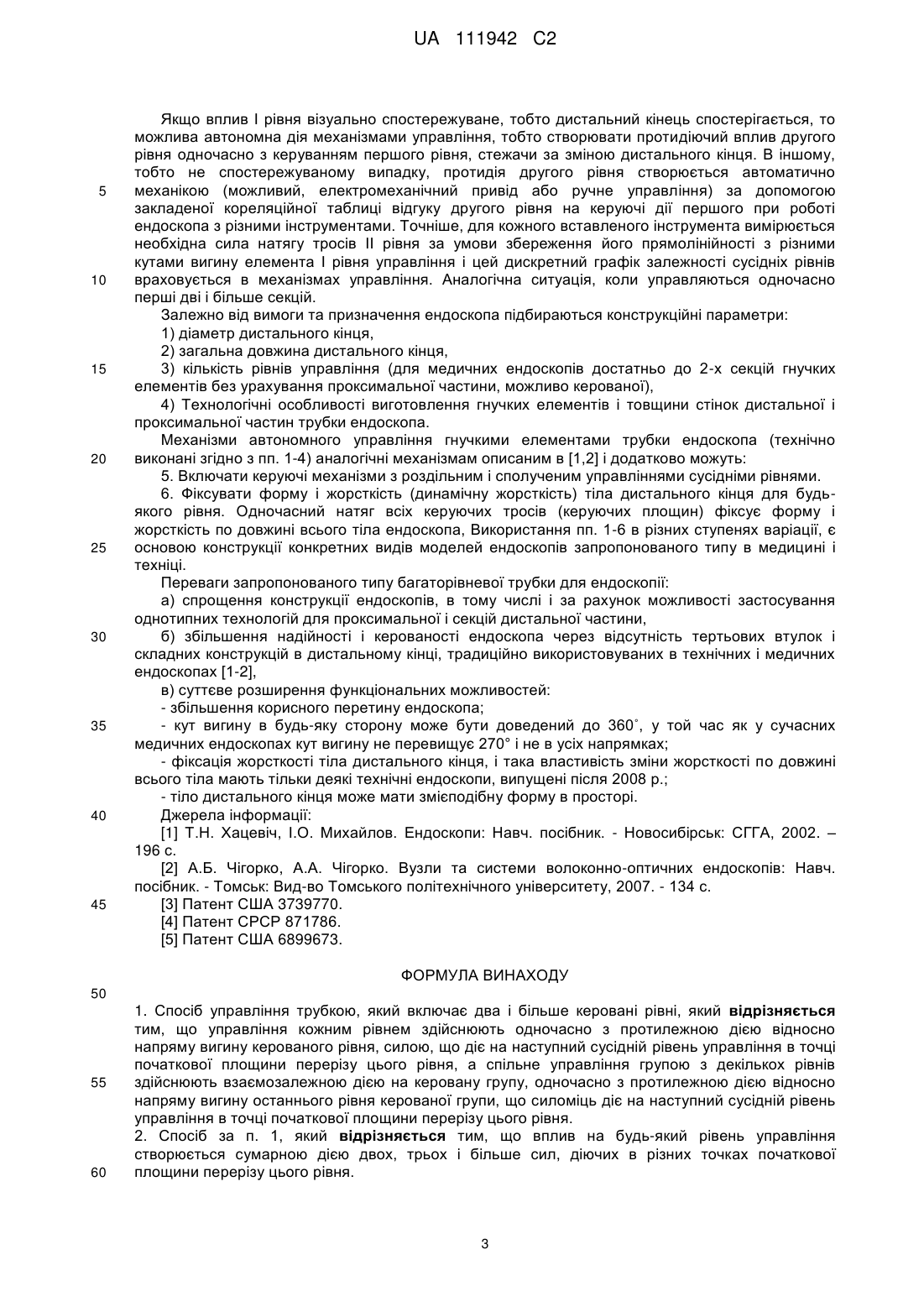
3. Керована трубка для ендоскопії, що містить дві або більше керовані секції у вигляді послідовно сполучених гнучких елементів з тросами, що управляють, для всіх рівнів, що проходять по каналах через всі секції ендоскопічної трубки і закріплені в початковій площині перерізу кожної секції управління до опорних кілець, яка відрізняється тим, що трубка виконана з можливістю управління кожною секцією впливом одночасно з протилежною дією відносно напряму вигину керованої секції силою, що діє на керуючий трос або троси наступної сусідньої секції в точці або точках опорного кільця цієї секції, а спільного управління групою з декількох секцій - здійсненням взаємозалежної дії тросів на групу керованих секцій, одночасно з протилежною дією відносно напряму вигину останньої секції керованої групи силою, що діє на керуючий трос або троси наступної сусідньої секції управління в точці або точках опорного кільця цієї секції.
4. Пристрій за п. 3, який відрізняється тим, що керована трубка має регульовану жорсткість по всій довжині трубки з початку секції або секцій шляхом створення, додатково до керуючої дії, рівних натягнень всіх тросів цієї секції або секцій.
5. Пристрій за п. 3, який відрізняється тим, що керована трубка технологічно виконана із сталевої трубки з властивістю пам'яті форми.
6. Пристрій за п. 4, який відрізняється тим, що керована трубка технологічно виконана із сталевої трубки з властивістю пам'яті форми.
7. Пристрій за п. 3, який відрізняється тим, що керована трубка технологічно виконана з використанням шарнірних конструкцій.
8. Пристрій за п. 4, який відрізняється тим, що керована трубка технологічно виконана з використанням шарнірних конструкцій.
Текст
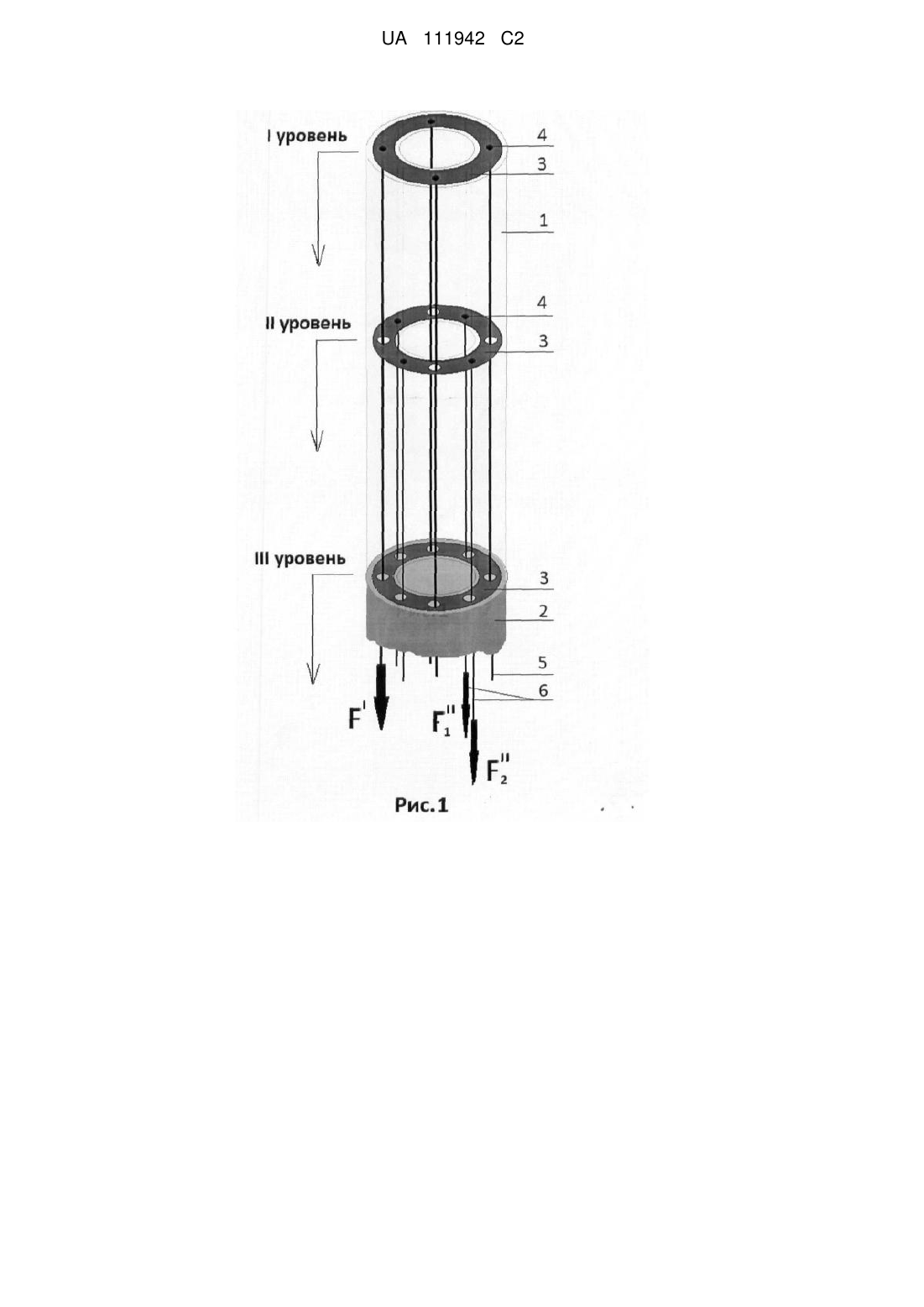
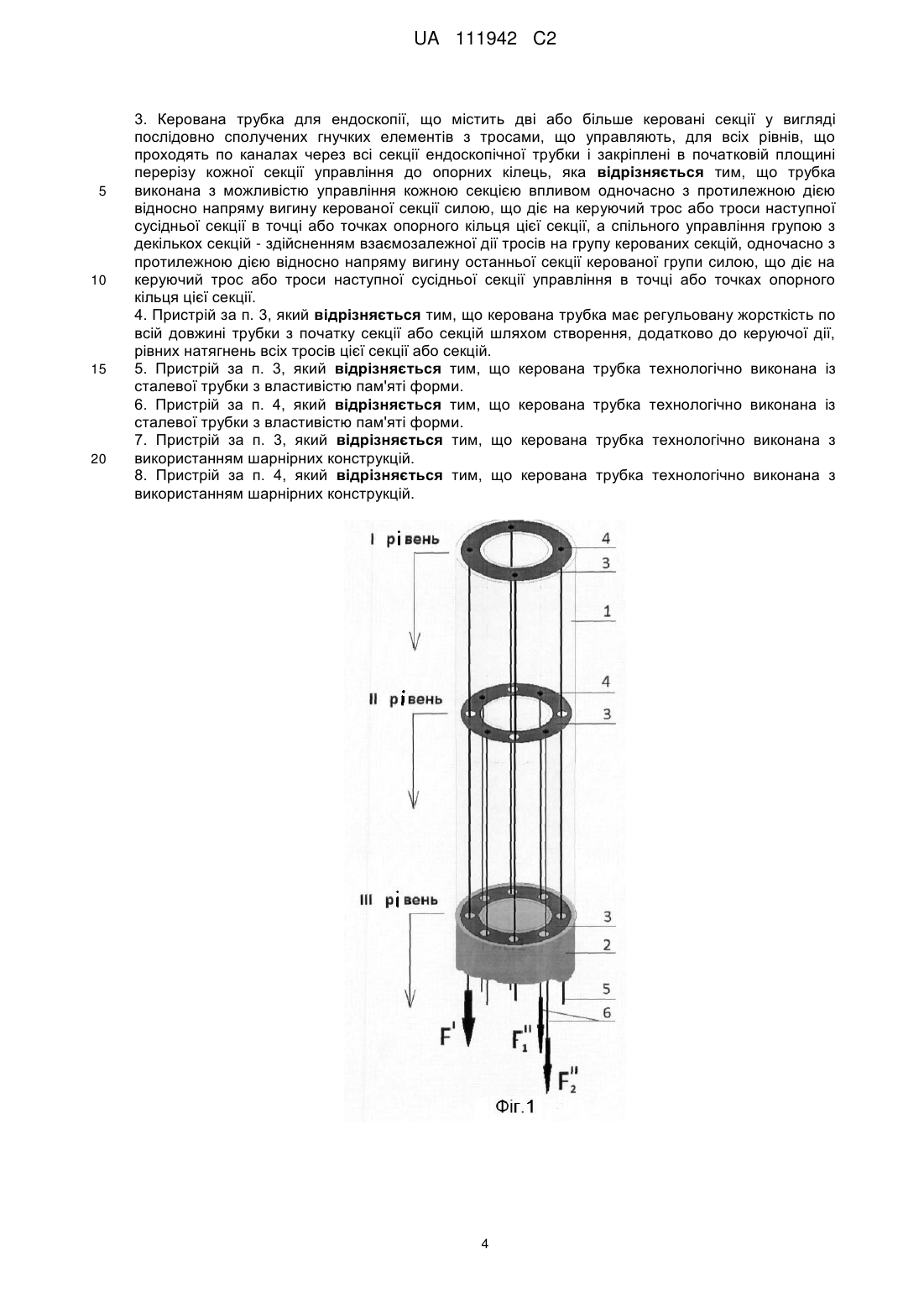
Реферат: Винахід належить до оптико-механічного машинобудування, зокрема до діагностичних пристроїв у медицині та техніці. Задача винаходу - створення нового типу (багаторівневої) керованої трубки для ендоскопії, яка дозволяє спростити конструкцію та суттєво підвищити надійність і функціональність ендоскопа. Зазначена задача вирішується шляхом багаторівневої дії протилежно направлених сил у точках вигину на трубку ендоскопа, складеного з декількох автономно керованих секцій (рівнів), що і є головною відмінністю від керування існуючих гнучких ендоскопів. UA 111942 C2 (12) UA 111942 C2 UA 111942 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до оптико-механічного машинобудування, зокрема може бути використано в медицині (діагностика і лікування) і техніці. Відома трубка для ендоскопії [3] гнучкий дистальний кінець виконаний у вигляді двох відрізків пружин, зістикованих за допомогою перехідних втулок в одну пружину з протилежними навивкам і поміщені в еластичну оболонку, і панорамний огляд забезпечується чотирма керованими тросами. Переміщення тросів, що управляють, в проксимальній частині здійснюється в обплетеннях Боудена (щільно навитих пружин), закріплених в площині стиковки з дистальним кінцем. Недоліком цієї керованої трубки є складність конструкції, обмеженість кута вигину і невеликий корисний переріз трубки ендоскопа. Конструкції управління нашого винаходу близькі патенти [4, 5], де пропонується дворівнева і трирівнева шарнірні конструкції дистального кінця ендоскопа (тобто дистальний кінець складається з двох і трьох керованих секцій або рівнів). Автономне управління кожною дистальною секцією ендоскопа досягається за допомогою тросів, що управляють, в обплетеннях Боудена, закріплених на початку кожного рівня, а самі обплетення закріплені в кінці цього рівня. Недоліком є складність і ненадійність конструкції із-за наявності металевих частин, що труться, і малого корисного перерізу ендоскопа. Конструкції управління також близькі дворівневі ендоскопи, що мають вищі характеристики надійності, які виконані зі сталевої трубки (з ніїтинолу або його аналогів) з властивістю пам'яті форми, як в [6], з вирізами, що чергуються по глибині і частоті по різних напрямах для забезпечення необхідної жорсткості і достатньої керованості. Резюмуючи, можна зробити висновок з [1-6], що на сьогодні існує єдиний спосіб управління трубками для ендоскопії, а саме: спосіб незалежного (автономного) управління дистальними секціями за допомогою тросів в обплетеннях Боудена. Таке управління діє лише на проміжок не охоплений обплетенням Боудена, отже змінюється геометрія лише цієї ділянки керованої трубки. В іншому випадку - за відсутності обплетень Боудена, змінюється геометрія всіх секцій трубки, що нижче ідуть за керованими секціями, таким чином, вищезгадані патенти близькі елементами конструкції ендоскопів, проте прототип відсутній. Наявність обплетень Боудена, в разі багаторівневого управління, звужує корисний переріз ендоскопів або діаметр інструментального каналу, що, наприклад, неприйнятний для уретросконій, де діаметр дистального кінця не повинен перевищувати 1,5-2,0 мм. Задача винаходу - опис нового способу управління і її реалізації як нового типу багаторівневої керованої трубки для ендоскопії. У винаході запропонований новий спосіб спосіб залежного управління дистальними секціями (рівнями) за допомогою тросів без обплетень Боудена і дані конструкції керованих трубок технологічно виконаних з гнучкої полімерної трубки, сталевої трубки з властивістю нам'яті форми і з трубкою шарнірною конструкцією секцій дистального кінця. Пропоновані прилади, основані на цьому способі управління, дозволяють істотно підвищити надійність і функціональність ендоскопа, зокрема: збільшують її корисний переріз, що прямо відбивається на часі виконання медичних операцій; наділяють трубку керованою жорсткістю; виключають використання сталевих втулок, що механічно труться, і складних конструкцій, тим самим дозволяють спрощувати і уніфікувати технологію виготовлення самої трубки. Вказана задача вирішується шляхом одночасної і багаторівневої дії на керовану групу секцій спільно з протилежно направленою дією, відносно напряму вигину останнього керованого рівня групи, що силоміць (або силами) діє на наступний сусідній до групи рівень управління в кранці (або точках) початкової площині перерізу цього рівня управління. Сучасні технології дозволяють отримувати композитні полімерні трубки з декількома шарами пружин і, додатково, багатошаровим обплетенням з круглого сталевого дроту діаметром до 0.01мм. або тканини. Далі назвемо секцію з такої трубки або аналогічних [3], які змінюють геометрію будь-якої, як завгодно малої, ділянки секці, схильної до дії сили (тобто безперервно, а для шарнірних конструкцій і ендоскопів із сталевої трубки з властивістю пам'яті форми відповідно геометрія дискретна) - гнучким елементом. Так як для наших цілей важлива тільки необхідна жорсткість гнучких елементів, обумовлена призначенням ендоскопа, будемо вважати, що необхідна жорсткість як в дистальному кінці (1, фіг.1), так і в проксимальній частині (2, фіг.1) забезпечена і, тому на фіг.1 схематично вказана тільки полімерна трубка. Рисунки 1, 2 пояснюють винахід, а також приклади конкретного виконання способу і пристрою для його здійснення, і жодним чином не обмежують обсяг домагань, викладений у формулі, а лише пояснюють суть винаходу і, тому, в частині способу у формулі; під керованою трубкою слід розуміти якусь гнучку трубку візуально поділену на частини з необов'язково фіксованими межами, а під керуючим впливом вважати механічне (тут в пристрої використана сила тяги тросів), магнітне, лазерне, ультразвукове тощо. 1 UA 111942 C2 5 10 15 20 25 30 35 Керований дистальний кінець пропонованого типу ендоскопа на фіг.1 складається з трьох секцій гнучких елементів і, можливо, різної жорсткості. Для управління на кожному рівні встановлені опорні кільця з прикріпленими за допомогою точкового зварювання 4-ма тросами (3,4 на фіг.1) і з 4-ма отворами для тросів усіх попередніх рівнів і також виконані канали через все тіло ендоскопа для тросів управління всіх рівнів (фіг.1), Інший кінець тросів йде до механізмів управління. Таким чином, для трирівневого управління ендоскопом потрібні 12 каналів-отворів для тросів на останньому рівні управління. Збільшення кількості рівнів накладає все більш жорсткі вимоги на якість тросів, покриття каналів і стінки трубки ендоскопа. Можливе поєднання каналів для тросів всіх непарних і всіх парних рівнів, що потребують всього 8 каналів в проксимальній частині. Без втрати спільності, ми будемо обговорювати дворівневе управління ендоскопа і, причому, III рівень - це управління проксимальної частини, яке може бути відсутнім, якщо жорсткість проксимальної частини така, що вплив сил переданих з верхніх рівнів не впливає на конфігурацію вигину проксимальної частини, як на фіг.1. Незалежно від жорсткості, управління III рівня може бути відсутнім, наприклад, якщо в цій секції для всіх тросів використані обплетення Боудена, які закріплені з опорним кільцем II рівня. Для простоти, на фіг.1 схематично зображено випадок відсутності керуючих тросів III рівня, що достатньо для розуміння суті винаходу. По суті, в нашому розумінні, трубка ендоскопа з однорівневим управлінням дистального кінця і проксимальною частиною є дворівневим ендоскопом з некерованим другим рівнем. Спосіб дій для управління ендоскопом зрозумілий з фіг.1: якщо на якій-небудь трос Т рівня І (5 фіг.1) прикладена сила F >О і гнучкий елемент І рівня зігнутий, тоді одночасно створюються протидіючі парні і симетричні сили II рівня і , тобто натяг II рівня проводиться протилежно стоячими і симетричними двома тросами II рівня (6 на фіг.1) для збереження геометрії (на фіг. прямолінійності) II рівня. Парна протидія необхідна для стійкості управління, зокрема повної компенсації виникаючих обертальних моментів при вигині трубки. Протидіючі сили можуть створюватися шляхом управління всією площиною опорних кілець різних рівнів, тобто на будьякому рівні, управління може здійснюватися силами натягу тросів, прикладених не тільки в одній або одночасно в двох точках, але і в трьох і більше точках опорного кільця, що, природно, має враховуватися в конструкції керуючого механізму. Якщо одночасно управляються І і II рівні, тобто змінюється геометрія тільки перших двох рівнів, тоді необхідно і одночасний вплив III рівня протидіючого напрямку вигину II рівня і ця протидія, в силу відсутності на фіг.1 управління III рівня, як зазначено вище, компенсується жорсткістю III рівня. На фіг.2 схематично наведені конфігурації вигинів дистального кінця ендоскопа в площині, І що проходять через вісь трубки, при дії сили натягу F та інших сил на інших рівнях. У статиці, І тобто на І рівні сила натягу F =0 і результуючі сили II рівня (обумовлені вагою першої секції) і III рівня (обумовлені вагою двох секцій), тоді трубка прямолінійна по всій дистальній частині (фіг.2а). Наявність рівних, але ненульових результуючих сил II і III рівня відповідно перевищують сили обумовлені вагою однієї та другої секцій і при відсутності сили 40 45 І натягу І рівня (F =0 і )) слід розуміти як управління всією площиною опорних кілець II рівня, тобто присутній рівний натяг відразу всіх 4-х тросів відповідних рівнів, що відповідає створенню додаткової жорсткості або динамічної жорсткості з другого рівня. Таким чином можна створювати велику динамічну жорсткість при відносно невеликій вихідній (статичної) жорсткості з будь-якого рівня управління трубки. І У динаміці (наприклад F >0), якщо результуюча сила створена силами II рівня і , врівноважує силу І , кінематично передану на II рівень силою першого рівня F >0, то трубка на І І рівні вигнута, а з другого рівня прямолінійна (фіг.2b, де F >0 і тобто при І 50 55 , ) при їх відмінності, І - і F >0 вигини обох рівнів трубки будуть в одному напрямку (фіг.2с), а якщо - і F >0 вигин ІІ рівня спрямований у протилежний бік, тобто тіло дистального кінця буде мати змієподібну форму фіг.2d). Таким чином, в динаміці, при кількості рівнів управління більше одного, дистальна частина по всій довжині може мати різні радіуси вигину, у тому числі і в зворотному напрямку. Додаткова жорсткість, починаючи з будь-якого рівня може бути створена відповідними силами тяг і в цьому випадку. Так як такі поєднання сил, одержувані впливом на відповідні тяги сусідніх рівнів, можуть бути відтворені у перерізі будь-якої площини проходить через вісь трубки (на фіг.2 показано переріз в одній площині), тоді кінчик першого рівня дистальної частини буде здійснювати панорамний огляд досліджуваної області. 2 UA 111942 C2 5 10 15 20 25 30 35 40 45 Якщо вплив І рівня візуально спостережуване, тобто дистальний кінець спостерігається, то можлива автономна дія механізмами управління, тобто створювати протидіючий вплив другого рівня одночасно з керуванням першого рівня, стежачи за зміною дистального кінця. В іншому, тобто не спостережуваному випадку, протидія другого рівня створюється автоматично механікою (можливий, електромеханічний привід або ручне управління) за допомогою закладеної кореляційної таблиці відгуку другого рівня на керуючі дії першого при роботі ендоскопа з різними інструментами. Точніше, для кожного вставленого інструмента вимірюється необхідна сила натягу тросів II рівня за умови збереження його прямолінійності з різними кутами вигину елемента І рівня управління і цей дискретний графік залежності сусідніх рівнів враховується в механізмах управління. Аналогічна ситуація, коли управляються одночасно перші дві і більше секцій. Залежно від вимоги та призначення ендоскопа підбираються конструкційні параметри: 1) діаметр дистального кінця, 2) загальна довжина дистального кінця, 3) кількість рівнів управління (для медичних ендоскопів достатньо до 2-х секцій гнучких елементів без урахування проксимальної частини, можливо керованої), 4) Технологічні особливості виготовлення гнучких елементів і товщини стінок дистальної і проксимальної частин трубки ендоскопа. Механізми автономного управління гнучкими елементами трубки ендоскопа (технічно виконані згідно з пп. 1-4) аналогічні механізмам описаним в [1,2] і додатково можуть: 5. Включати керуючі механізми з роздільним і сполученим управліннями сусідніми рівнями. 6. Фіксувати форму і жорсткість (динамічну жорсткість) тіла дистального кінця для будьякого рівня. Одночасний натяг всіх керуючих тросів (керуючих площин) фіксує форму і жорсткість по довжині всього тіла ендоскопа, Використання пп. 1-6 в різних ступенях варіації, є основою конструкції конкретних видів моделей ендоскопів запропонованого типу в медицині і техніці. Переваги запропонованого типу багаторівневої трубки для ендоскопії: а) спрощення конструкції ендоскопів, в тому числі і за рахунок можливості застосування однотипних технологій для проксимальної і секцій дистальної частини, б) збільшення надійності і керованості ендоскопа через відсутність тертьових втулок і складних конструкцій в дистальному кінці, традиційно використовуваних в технічних і медичних ендоскопах [1-2], в) суттєве розширення функціональних можливостей: - збільшення корисного перетину ендоскопа; - кут вигину в будь-яку сторону може бути доведений до 360˚, у той час як у сучасних медичних ендоскопах кут вигину не перевищує 270° і не в усіх напрямках; - фіксація жорсткості тіла дистального кінця, і така властивість зміни жорсткості по довжині всього тіла мають тільки деякі технічні ендоскопи, випущені після 2008 р.; - тіло дистального кінця може мати змієподібну форму в просторі. Джерела інформації: [1] Т.Н. Хацевіч, І.О. Михайлов. Ендоскопи: Навч. посібник. - Новосибірськ: СГГА, 2002. – 196 с. [2] А.Б. Чігорко, А.А. Чігорко. Вузли та системи волоконно-оптичних ендоскопів: Навч. посібник. - Томськ: Вид-во Томського політехнічного університету, 2007. - 134 с. [3] Патент США 3739770. [4] Патент СРСР 871786. [5] Патент США 6899673. ФОРМУЛА ВИНАХОДУ 50 55 60 1. Спосіб управління трубкою, який включає два і більше керовані рівні, який відрізняється тим, що управління кожним рівнем здійснюють одночасно з протилежною дією відносно напряму вигину керованого рівня, силою, що діє на наступний сусідній рівень управління в точці початкової площини перерізу цього рівня, а спільне управління групою з декількох рівнів здійснюють взаємозалежною дією на керовану групу, одночасно з протилежною дією відносно напряму вигину останнього рівня керованої групи, що силоміць діє на наступний сусідній рівень управління в точці початкової площини перерізу цього рівня. 2. Спосіб за п. 1, який відрізняється тим, що вплив на будь-який рівень управління створюється сумарною дією двох, трьох і більше сил, діючих в різних точках початкової площини перерізу цього рівня. 3 UA 111942 C2 5 10 15 20 3. Керована трубка для ендоскопії, що містить дві або більше керовані секції у вигляді послідовно сполучених гнучких елементів з тросами, що управляють, для всіх рівнів, що проходять по каналах через всі секції ендоскопічної трубки і закріплені в початковій площині перерізу кожної секції управління до опорних кілець, яка відрізняється тим, що трубка виконана з можливістю управління кожною секцією впливом одночасно з протилежною дією відносно напряму вигину керованої секції силою, що діє на керуючий трос або троси наступної сусідньої секції в точці або точках опорного кільця цієї секції, а спільного управління групою з декількох секцій - здійсненням взаємозалежної дії тросів на групу керованих секцій, одночасно з протилежною дією відносно напряму вигину останньої секції керованої групи силою, що діє на керуючий трос або троси наступної сусідньої секції управління в точці або точках опорного кільця цієї секції. 4. Пристрій за п. 3, який відрізняється тим, що керована трубка має регульовану жорсткість по всій довжині трубки з початку секції або секцій шляхом створення, додатково до керуючої дії, рівних натягнень всіх тросів цієї секції або секцій. 5. Пристрій за п. 3, який відрізняється тим, що керована трубка технологічно виконана із сталевої трубки з властивістю пам'яті форми. 6. Пристрій за п. 4, який відрізняється тим, що керована трубка технологічно виконана із сталевої трубки з властивістю пам'яті форми. 7. Пристрій за п. 3, який відрізняється тим, що керована трубка технологічно виконана з використанням шарнірних конструкцій. 8. Пристрій за п. 4, який відрізняється тим, що керована трубка технологічно виконана з використанням шарнірних конструкцій. 4 UA 111942 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A61B 1/005, A61B 17/94
Мітки: спосіб, пристрій, ендоскопії, здійснення, трубкою, управління, гнучкою
Код посилання
<a href="https://ua.patents.su/7-111942-sposib-upravlinnya-gnuchkoyu-trubkoyu-dlya-endoskopi-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління гнучкою трубкою для ендоскопії і пристрій для його здійснення</a>
Спосіб управління насосною установкою та пристрій для його здійснення
Номер патенту: 37367
Опубліковано: 15.05.2001
Автори: Виноградов Борис Володимирович, Орел Микола Сергійович, Свєткіна Олена Юр'євна
МПК: F04B 49/02
Мітки: насосною, установкою, пристрій, управління, спосіб, здійснення
Формула / Реферат:
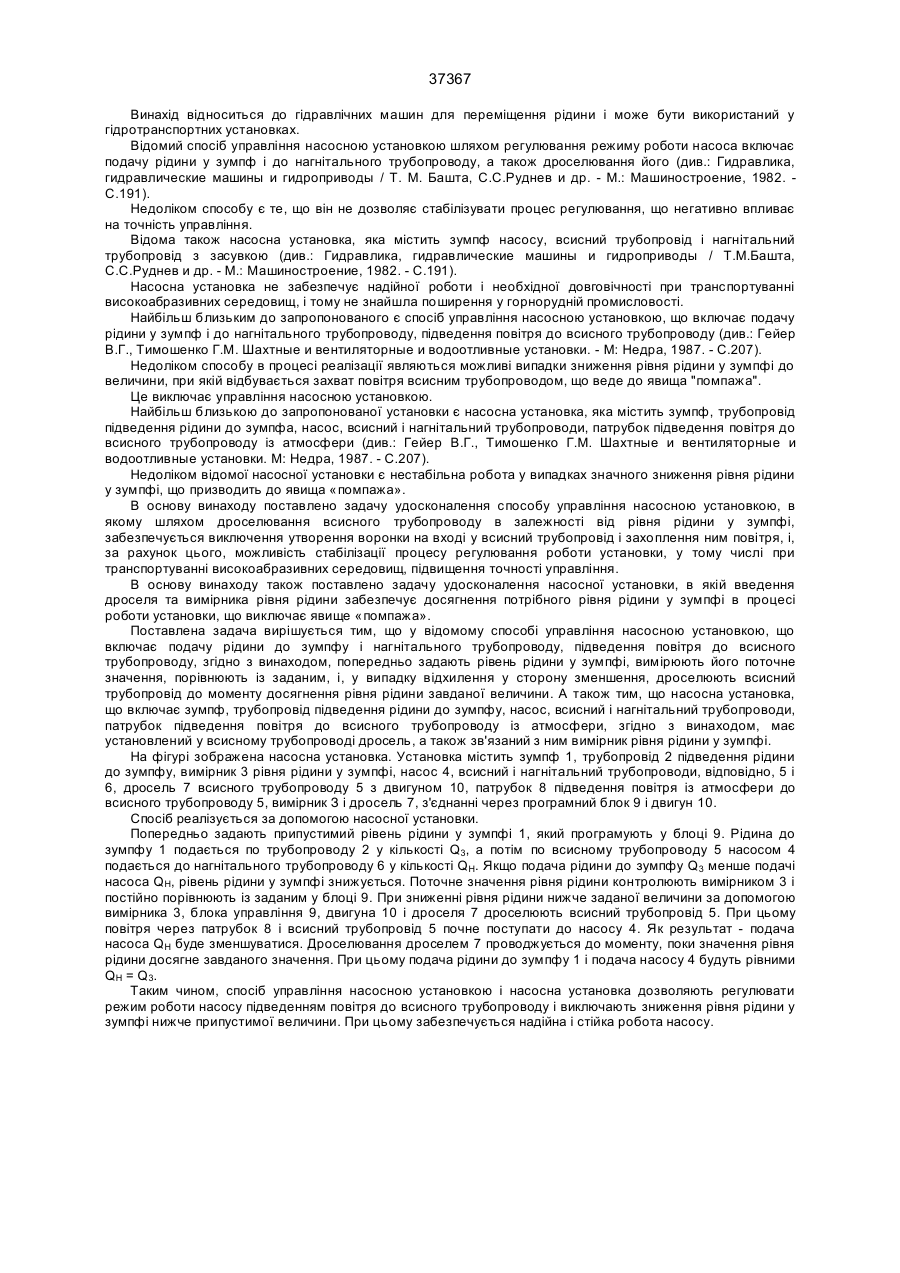
1. Спосіб управління насосною установкою, що включає подачу рідини у зумпф і до нагнітального трубопроводу, підведення повітря до всисного трубопроводу, який відрізняється тим, що попередньо задає рівень рідини у зумпфі, вимірює його поточне значення, порівнює із заданим, і, у випадку відхилення в сторону зменшення, дроселює всисний трубопровід до моменту досягнення рівня рідини заданої величини. 2. Насосна установка, яка містить...
Спосіб управління гідротранспортною установкою та пристрій для його здійснення
Номер патенту: 30476
Опубліковано: 15.11.2000
Автори: Виноградов Борис Володимирович, Свєткіна Олена Юрьївна
МПК: F04B 49/02
Мітки: пристрій, гідротранспортною, установкою, здійснення, управління, спосіб
Формула / Реферат:
1. Спосіб управління гідротранспортною установкою, що включає подачу гідросуміші до нагнітального трубопроводу установки, який відрізняється тим, що попередньо задають величину швидкості гідросуміші у нагнітальному трубопроводі, вимірюють її поточне значення, порівнюють із заданим, і, у випадку відхилення в сторону зменшення, подають стиснене повітря до нагнітального трубопроводу до моменту досягнення швидкості гідросуміші заданої...
Спосіб управління рухом сідлового автопоїзда й пристрій для його здійснення
Номер патенту: 46239
Опубліковано: 15.05.2002
Автори: Піскачов Олександр Іванович, П'янков Анатолій Андрійович, Агафонов Юрій Миколайович
МПК: B62D 53/00, B62D 13/00
Мітки: рухом, автопоїзда, пристрій, здійснення, спосіб, сідлового, управління
Формула / Реферат:
1. Спосіб управління курсовим рухом сідлового автопоїзда, здебільшого з неповоротними відносно рами колесами напівпричепа, при якому вимірюють поточне значення кута складання тягача з напівпричепом і завертають колеса тягача, які управляються, на кут у залежності від зміни величин параметрів, які вимірюються, який відрізняється тим, що задають кут необхідного напрямку руху автопоїзда заднім ходом, вимірюють поточне значення різниці між...
Спосіб силового автоматичного управління електричною машиною та пристрій для його здійснення
Номер патенту: 54727
Опубліковано: 17.03.2003
Автори: Богомол Володимир Іванович, Туваржиєв Валентин Карпович, Ленчевський Євген Анатолійович, Борсук Євген Павлович
МПК: G05F 1/00
Мітки: пристрій, здійснення, машиною, управління, спосіб, електричною, автоматичного, силового
Формула / Реферат:
1. Спосіб силового автоматичного управління електричною машиною, який полягає у тому, що порівнюють відхилення рівня параметра у точці регулювання від еталонного рівня регульованого параметра, а потім на основі порівняння, рівень напруги електроенергії джерела електричного струму обмежують, отриману електроенергію фільтрують і подають на збудження електричної машини, який відрізняється тим, що рівень напруги електроенергії джерела...
Спосіб управління роботою та пристрій для його здійснення
Номер патенту: 30168
Опубліковано: 15.11.2000
Автори: Накидайло Артем Сергійович, Кириченко Євген Олексійович, Вишняк Євген Олександрович
Мітки: спосіб, управління, роботою, здійснення, пристрій
Формула / Реферат:
1. Спосіб управління роботою ерліфта, який включає подачу на всмоктування компресора атмосферного повітря, відсепарованого у ерліфті газу, який відрізняється тим, що попередньо задають умову відношення температур атмосферного повітря (Тн) та відсепарованого газу (Те) у процесі підйому пульпи регулюють шляхом зміни опору всмоктуючого патрубка витратний склад компонентів у...
Попередній патент: Інформаційно-вимірювальна система
Наступний патент: Спосіб і реактор для селективного видалення продукту із газоподібної системи
Випадковий патент: Спосіб одержання препарату для лікування паразитарних захворювань тварин