Спосіб управління рухом сідлового автопоїзда й пристрій для його здійснення
Номер патенту: 46239
Опубліковано: 15.05.2002
Автори: П'янков Анатолій Андрійович, Агафонов Юрій Миколайович, Піскачов Олександр Іванович

Формула / Реферат
1. Спосіб управління курсовим рухом сідлового автопоїзда, здебільшого з неповоротними відносно рами колесами напівпричепа, при якому вимірюють поточне значення кута складання тягача з напівпричепом і завертають колеса тягача, які управляються, на кут у залежності від зміни величин параметрів, які вимірюються, який відрізняється тим, що задають кут необхідного напрямку руху автопоїзда заднім ходом, вимірюють поточне значення різниці між заданим кутом необхідного напрямку руху автопоїзда заднім ходом та кутом нахилу осі напівпричепа до осі дороги і поворот коліс тягача, які управляються, здійснюють на кут повороту у відповідності із формулою
![]()
де
![]() - кут повороту коліс тягача, що управляються;
- кут повороту коліс тягача, що управляються;
![]() - кут складання тягача з напівпричепом;
- кут складання тягача з напівпричепом;
![]() - кут нахилу осі напівпричепа до поздовжньої лінії наїзду;
- кут нахилу осі напівпричепа до поздовжньої лінії наїзду;
![]() - кут необхідного напрямку руху автопоїзда заднім ходом;
- кут необхідного напрямку руху автопоїзда заднім ходом;
![]() - постійні коефіцієнти підсилення.
- постійні коефіцієнти підсилення.
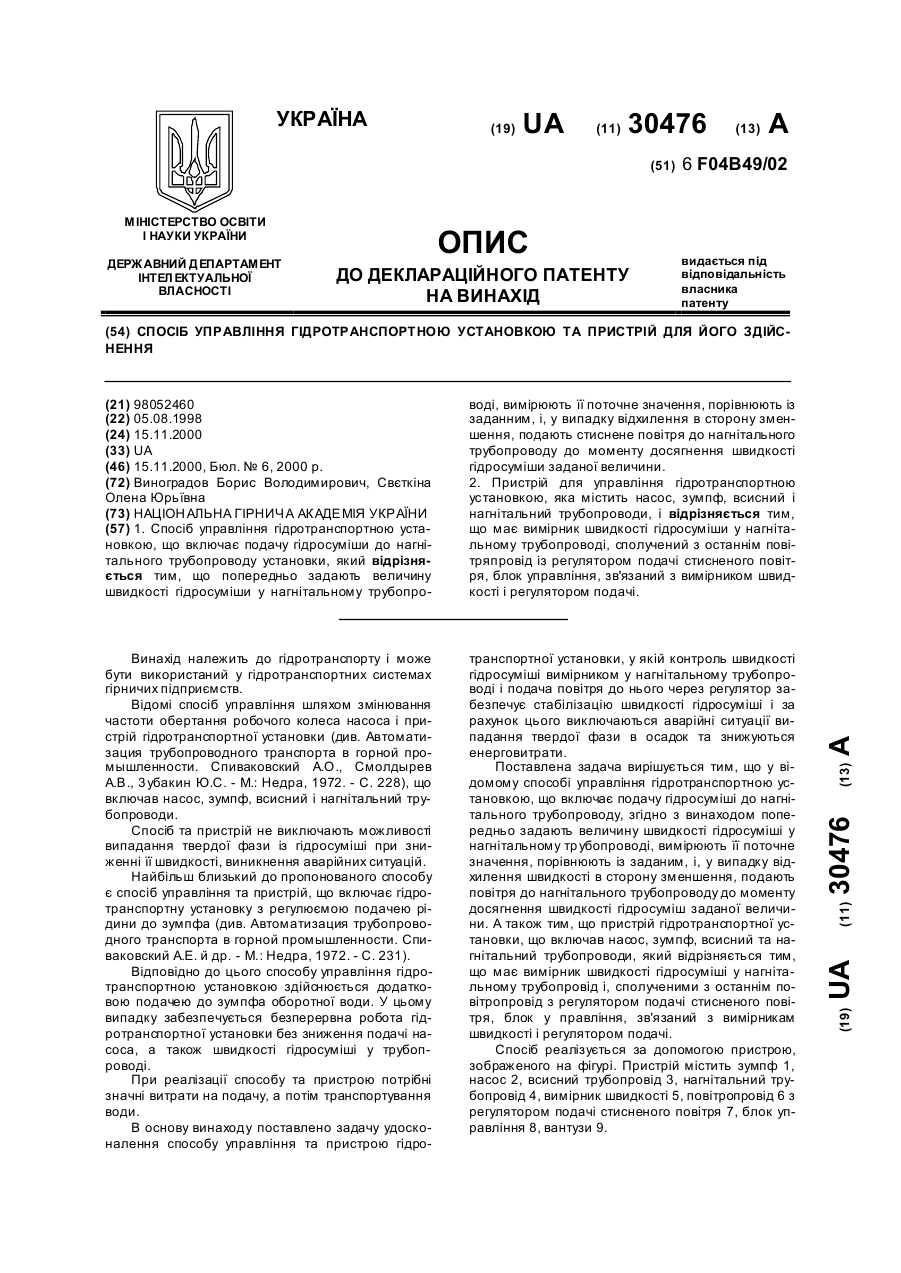
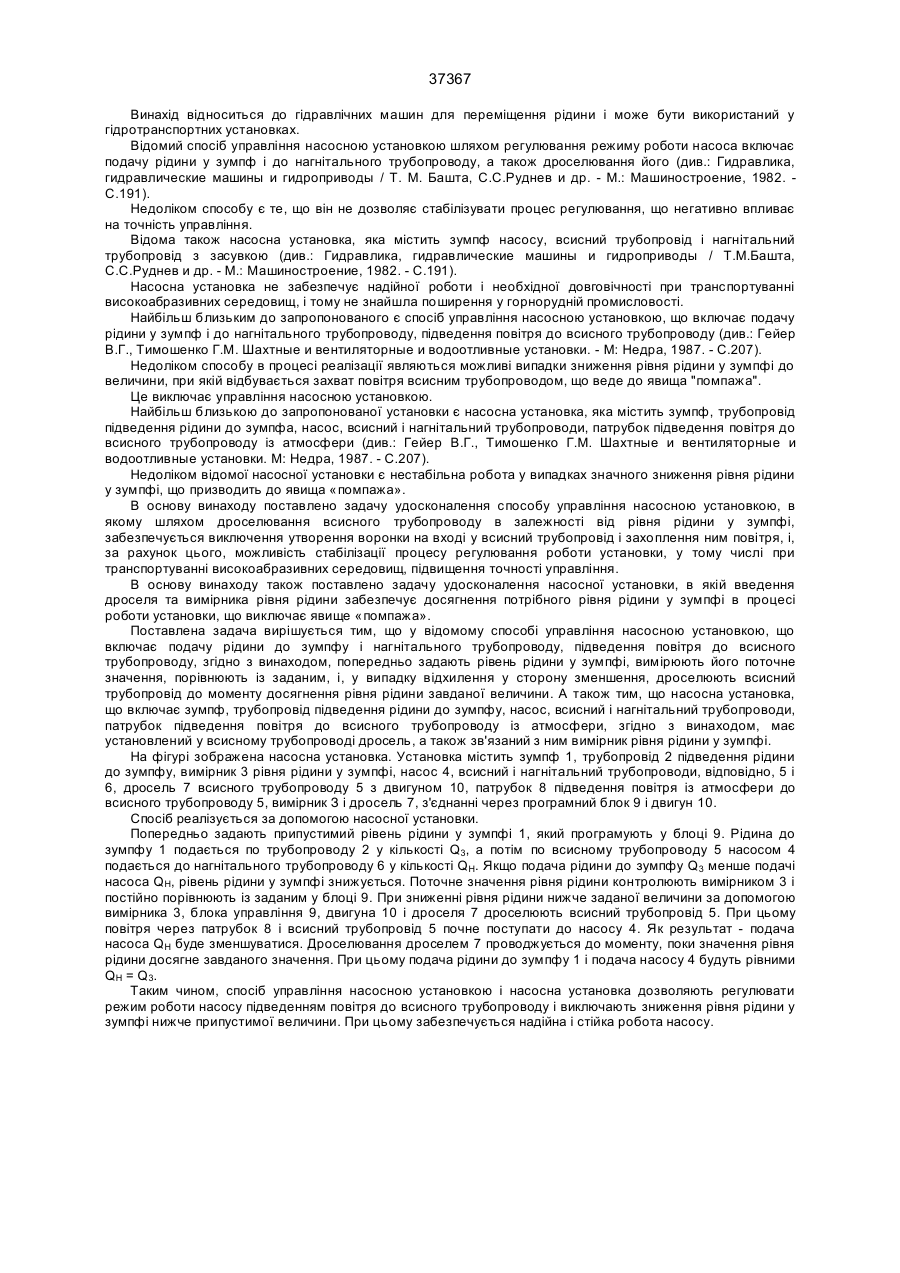
2. Пристрій управління рухом сідлового автопоїзда, здебільшого з неповоротними відносно рами колесами напівпричепа, що містить об'єкт управління, перший та другий підсилювачі, перший та другий суматори, нуль-індикатор, рульовий привід, систему, що стежить за поворотом коліс, датчик кута повороту коліс тягача, що управляються, датчик кута складання тягача з напівпричепом, причому виходи першого та другого підсилювачів підключені до входів першого суматора, вихід якого підключено до входу другого суматора, вихід котрого через нуль-індикатор і рульовий механізм з'єднаний з системою, що стежить за поворотом коліс, до якої також підключено датчик кута повороту передніх коліс тягача, що управляються, своїм виходом з'єднаний із входом другого суматора, а вихід системи, що стежить за поворотом коліс, які управляються, зв'язаний з об'єктом управління, котрий підключений до датчика кута складання тягача з напівпричепом, який відрізняється тим, що має прилад задавання кута необхідного напрямку руху автопоїзда заднім ходом і датчик кута нахилу осі рами напівпричепа до необхідного напрямку руху автопоїзда, причому прилад задавання кута своїм виходом з'єднаний з другим входом датчика кута нахилу осі рами напівпричепа до необхідного напрямку руху автопоїзда, котрий першим входом зв'язаний з об'єктом управління, а виходом - з входом першого підсилювача.
Текст
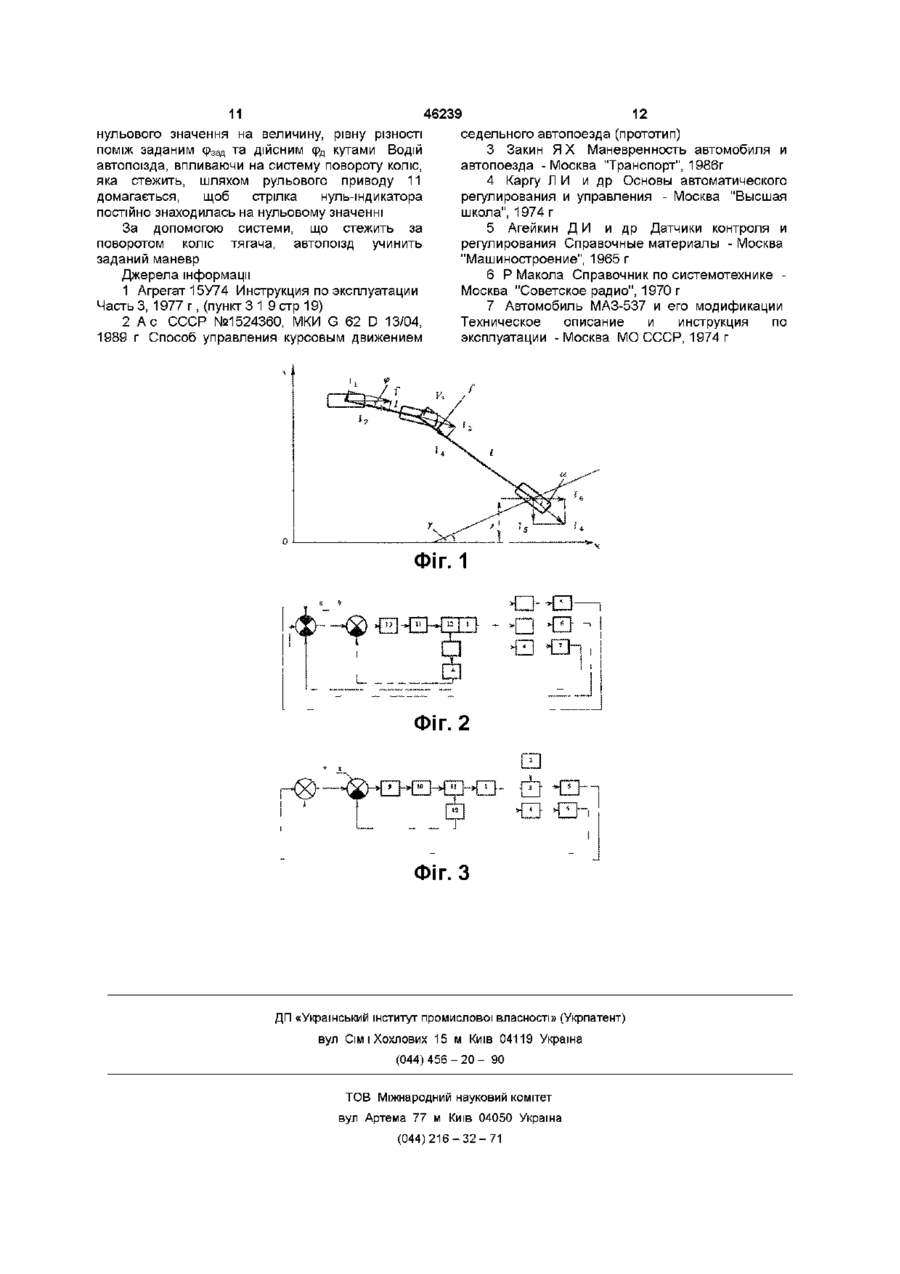
1 Спосіб управління курсовим рухом сідлового автопоїзда, здебільшого з неповоротними відносно рами колесами напівпричепа, при якому вимірюють поточне значення кута складання тягача з напівпричепом і завертають колеса тягача, які управляються, на кут у залежності від зміни величин параметрів, які вимірюються, який відрізняється тим, що задають кут необхідного напрямку руху автопоїзда заднім ходом, вимірюють поточне значення різниці між заданим кутом необхідного напрямку руху автопоїзда заднім ходом та кутом нахилу осі напівпричепа до осі дороги і поворот коліс тягача, які управляються, здійснюють на кут повороту у ВІДПОВІДНОСТІ із формулою Де ер - кут повороту коліс тягача, що управляються, Р - кут складання тягача з напівпричепом, ^ - кут нахилу осі напівпричепа до поздовжньої лінії наїзду, к к ПОСТІЙНІ коефіцієнти підсилення 2 Пристрій управління рухом сідлового автопоїзда, здебільшого з неповоротними відносно рами колесами напівпричепа, що містить об'єкт управління, перший та другий підсилювачі, перший та другий суматори, нуль-індикатор, рульовий привід, систему, що стежить за поворотом коліс, датчик кута повороту коліс тягача, що управляються, датчик кута складання тягача з напівпричепом, причому виходи першого та другого підсилювачів підключені до входів першого суматора, вихід якого підключено до входу другого суматора, вихід котрого через нульіндикатор і рульовий механізм з'єднаний з системою, що стежить за поворотом коліс, до якої також підключено датчик кута повороту передніх коліс тягача, що управляються, своїм виходом з'єднаний із входом другого суматора, а вихід системи, що стежить за поворотом коліс, які управляються, зв'язаний з об'єктом управління, котрий підключений до датчика кута складання тягача з напівпричепом, який відрізняється тим, що має прилад задавання кута необхідного напрямку руху автопоїзда заднім ходом і датчик кута нахилу осі рами напівпричепа до необхідного напрямку руху автопоїзда, причому прилад задавання кута своїм виходом з'єднаний з другим входом датчика кута нахилу осі рами напівпричепа до необхідного напрямку руху автопоїзда, котрий першим входом зв'язаний з об'єктом управління, а виходом - з входом першого підсилювача У - кут необхідного напрямку руху автопоїзда заднім ходом, Винахід, що пропонується, відноситься до автомобільної техніки і може бути використаний при розробці сідлових автопоїздів, що мають неповоротні колеса напівпричепа Відомий спосіб управління рухом сідлового автопоїзда заднім ходом, що заключаешься у первісному установленні тягача та напівпричепа в одну ЛІНІЮ і наступній подачі автопоїзда назад до призначеного об'єкта уздовж поздовжньої лінії наїзду так, щоб кромки лівих коліс тягача й ПІДВІСКИ напівпричепа співпадали з поздовжньою ЛІНІЄЮ наїзду й ПІДВІСКИ [1] До недоліків даного способу відноситься невигідність та неточність управління, котрі ведуть до надмірної напруги водія при управлінні автопоїздом, що рухається заднім ходом, і со сч (О 46239 автопоїзда з направляючою неможливість постійно вести спостереження за В основу винаходу поставлене завдання положенням елементів тягача з напівпричепом і створити такий спосіб управління рухом сигналами регулювальника, зважаючи на те, що сідельного автопоїзда заднім ходом, котрий довжина напівпричепа значно більше, ніж ширина шляхом повороту коліс тягача, які управляються тягача згідно закону управління колесами тягача, який Відомий також спосіб управління рухом був розроблений, підвищив би маневреність сідлового автопоїзда заднім ходом, що автопоїзда при його русі заднім ходом заключаешься у тому, що водій за допомогою дзеркал заднього виду та сигналів, що подаються Поставлене завдання вирішується за рахунок регулювальником, керує передніми колесами того, що у способі управління курсовим рухом тягача, забезпечуючи необхідний маневр сідлового автопоїзда, при якому вимірюють автопоїзда поточне значення кута складання тягача з напівпричепом і завертають колеса тягача, що Недоліком цього способу являється управляються, на кут у залежності від зміни обмеженість інформації про положення величин параметрів, які вимірюються, додатково напівпричепа відносно дороги, що ускладнює задають кут необхідного напрямку руху автопоїзда управління автопоїздом і може призвести до заднім ходом, вимірюють поточне значення складання тягача з напівпричепом, коли він різності поміж заданим кутом необхідного рухається заднім ходом напрямку руху автопоїзда заднім ходом та кутом Сідловин автопоїзд із неповоротними нахилу осі напівпричепа до осі дороги й поворот колесами напівпричепа, який рухається заднім коліс тягача, які управляються, здійснюють на кут ходом - це розімкнута, отже, нестійка система у ВІДПОВІДНОСТІ з формулою Отже, неправильні дії водія можуть призвести до складання автопоїзда й утрати його рухомості ф = к1р + к2{у-а\ (2) Усі ЦІ недоліки призводять до великих витрат де ф - кут повороту середнього колеса тягача, часу на подачу автопоїзда заднім ходом до об'єкта що управляється та визначається кутами повороту призначення або при русі у заданому напрямку, а також підвищеному видатку палива двигуном тягача Найбільш близьким до передбачуваного технічного рішення, вибраного в якості прототипу, є спосіб управління курсовим рухом сідлового автопоїзду [2], який заключається у тому, що вимірюють кут складання тягача з напівпричепом [З, кут нахилу осі напівпричепа до поздовжньої лінії наїзду а, зміщення лівих коліс напівпричепа відносно поздовжньої лінії наїзду та повертають колеса тягача, котрі управляються, на кут у залежності від зміни величин параметрів, що вимірюються у ВІДПОВІДНОСТІ із формулою к-іі2 (1) де ф - кут повороту коліс тягача, що управляються, Р - кут складання тягача з напівпричепом, z - зміщення лівих коліс напівпричепа відносно поздовжній осі наїзду, k-і, кг, кз- коефіцієнти підсилення Недоліком способу-прототипу є те, що він не забезпечує необхідного маневрування автопоїзда, який рухається заднім ходом, у випадках, коли на шляху автопоїзда є перешкоди (наприклад, ями або ІНШІ автомобілі), котрі необхідно об'їжджати Це пояснюється тим, що закон управління колесами тягача (1) дозволяє забезпечити приведення сідлового автопоїзда з неповоротними колесами напівпричепа у ЛІНІЮ (тобто, коли поздовжні осі тягача та напівпричепа лежать на одній прямій) і тривалий рух уздовж прямої, яка направляє Для реалізації закону управління (1) необхідно безперервне вимірювання параметрів [З, а та z Крім того, вимірювання а та z вимагає наявності жорсткого чи іншого зв'язку з направляючою, уздовж якої автопоїзд повинен рухатися Таким чином, реалізація даного способу можлива лише при наявності направляючої, яка пов'язана із землею, і при зв'язку напівпричепа правого та лівого (Н/1.Н'2) коліс (ВІДПОВІДНО) ЗГІДНО з формулою приведення, що відома н - кут складання тягача з напівпричепом, а - кут нахилу осі напівпричепа ДО поздовжньої лінії наїзду, У - кут необхідного напрямку руху автопоїзда заднім ходом, кі.кг - ПОСТІЙНІ коефіцієнти підсилення Для визначення коефіцієнтів ki,k.2 розглянемо рух автопоїзда заднім ходом, представляючи автопоїзд у вигляді велосипедної схеми, що переміщується на площині відносно непорушної системи координат ХОУ ВІДОМІ [2] значення швидкостей V-іЛ/б ( фіг 1) V-i=V sin ф, V2=V COS ф, V3=V cos ф sin p, (3) V4=V COS ф COS p, V5=V cos ф cos p sin a, V6=V cos ф cos p cos a Запишемо рівняння ЗОВНІШНІХ переміщень ланок автопоїзда Вони будуть аналогічні рівнянням, наведеним у [2] l L (4) Уз L де І - довжина бази тягача, L - довжина бази напівпричепа Враховуючи значення швидкостей, рівняння ЗОВНІШНІХ рухів ланок можна переписати у вигляді Р=(5) V cos
ДивитисяДодаткова інформація
Автори англійськоюPiankov Anatolii Andriiovych, Agafonov Tyrii Mykolaiovych
Автори російськоюПьянков Анатолий Андреевич, Агафонов Юрий Николаевич
МПК / Мітки
МПК: B62D 13/00, B62D 53/00
Мітки: спосіб, пристрій, управління, автопоїзда, здійснення, сідлового, рухом
Код посилання
<a href="https://ua.patents.su/6-46239-sposib-upravlinnya-rukhom-sidlovogo-avtopozda-jj-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління рухом сідлового автопоїзда й пристрій для його здійснення</a>
Спосіб управління гідротранспортною установкою та пристрій для його здійснення
Номер патенту: 30476
Опубліковано: 15.11.2000
Автори: Свєткіна Олена Юрьївна, Виноградов Борис Володимирович
МПК: F04B 49/02
Мітки: здійснення, гідротранспортною, пристрій, установкою, управління, спосіб
Формула / Реферат:
1. Спосіб управління гідротранспортною установкою, що включає подачу гідросуміші до нагнітального трубопроводу установки, який відрізняється тим, що попередньо задають величину швидкості гідросуміші у нагнітальному трубопроводі, вимірюють її поточне значення, порівнюють із заданим, і, у випадку відхилення в сторону зменшення, подають стиснене повітря до нагнітального трубопроводу до моменту досягнення швидкості гідросуміші заданої...
Спосіб управління насосною установкою та пристрій для його здійснення
Номер патенту: 37367
Опубліковано: 15.05.2001
Автори: Орел Микола Сергійович, Виноградов Борис Володимирович, Свєткіна Олена Юр'євна
МПК: F04B 49/02
Мітки: управління, пристрій, спосіб, здійснення, насосною, установкою
Формула / Реферат:
1. Спосіб управління насосною установкою, що включає подачу рідини у зумпф і до нагнітального трубопроводу, підведення повітря до всисного трубопроводу, який відрізняється тим, що попередньо задає рівень рідини у зумпфі, вимірює його поточне значення, порівнює із заданим, і, у випадку відхилення в сторону зменшення, дроселює всисний трубопровід до моменту досягнення рівня рідини заданої величини. 2. Насосна установка, яка містить...
Спосіб управління рухом транспортного засобу
Номер патенту: 18699
Опубліковано: 25.12.1997
Автори: Андреєв Сергій Іванович, Охріменко Володимир Дмитрович, Саприкін Микола Олександрович, Павлюк Дмитро Олександрович, Баліцький Сергій Олександрович, Кизима Станіслав Степанович
МПК: G08G 1/01
Мітки: транспортного, засобу, рухом, спосіб, управління
Формула / Реферат:
Способ управления движением транспортного средства, основанный на измерении коэффициента сцепления колес с дорогой, вычислении максимально допустимой кинематической характеристики транспортного средства, измерении реальной кинематической характеристики транспортного средства, сравнении реальной и максимально-допустимой кинематических характеристик транспортного средства, изменении параметров движения транспортного средства таким образом,...
Спосіб автоматичного управління рухом транспортного засобу
Номер патенту: 13290
Опубліковано: 28.02.1997
Автори: Кизима Станіслав Степанович, Павлюк Дмитро Олександрович
МПК: B60T 8/72, G08G 1/052
Мітки: транспортного, спосіб, рухом, засобу, автоматичного, управління
Формула / Реферат:
(57) Способ автоматического управления движением транспортного средства, основанный на определении текущего значения ускорения транспортного средства и формировании управляющего воздействия на органы, связанные с движущим или тормозным приводом, отличающийся тем, что формируют соответствующий текущему значению ускорения транспортного средства сигнал динамической перегрузки, по значению которого осуществляют формирование управляющего...
Спосіб управління положенням центра тиску сонячної радіації на космічному апараті та пристрій для його здійснення
Номер патенту: 45415
Опубліковано: 15.04.2002
Автори: Науменко Роман Миколайович, Алпатов Анатолій Петрович
Мітки: апараті, тиску, центра, управління, здійснення, положенням, спосіб, космічному, пристрій, радіації, сонячної
Формула / Реферат:
1. Спосіб управління положенням центра тиску сонячної радіації на космічному апараті шляхом зміни положення відбивачів, який відрізняється тим, що у процесі управління додатково змінюють оптичні властивості поверхні відбивачів.2. Пристрій для управління положенням центра тиску сонячної радіації на космічному апараті, що містить плоскі відбивачі, які встановлено з можливістю зміни положення, який відрізняється тим, що відбивачі...
Попередній патент: Спосіб плавки чавуну та твердих відходів
Наступний патент: Захоплювач профільних деталей з змінними параметрами відповідно до поперечного перерізу деталі (конструкції)
Випадковий патент: Енантіомерно чисті фосфоіндоли як інгібітори віл