Спосіб керування ступенем ракети-носія
Номер патенту: 114354
Опубліковано: 25.05.2017
Автори: Коваленко Микола Дмитрович, Коваленко Тит Олександрович, Шептун Юрій Дмитрович
Формула / Реферат
Спосіб керування ступенем ракети-носія з масовою асиметрією навколо подовжньої осі, який включає операції визначення висоти підйому ракети, кутового та лінійного пересування ракети, видачу команд на виконавчі органи керування ракетою для відпрацювання збурень і програмний поворот усіх керуючих камер згоряння двигуна ракети, який відрізняється тим, що програмний поворот виконують до проходження лінії дії вектора тяги двигуна через центр мас ступеня шляхом повороту двигуна в шарнірі або несиметричного впорскування компонента палива у надзвукову частину сопла і одночасно з поворотом двигуна виконують перехід від використання подовжньої осі ступеня як "базової" при реалізації програмного виведення ступенем корисного вантажу в задану точку простору, до використання нового поточного напрямку лінії дії вектора тяги двигуна як "базового", замість напрямку подовжньої осі.
Текст
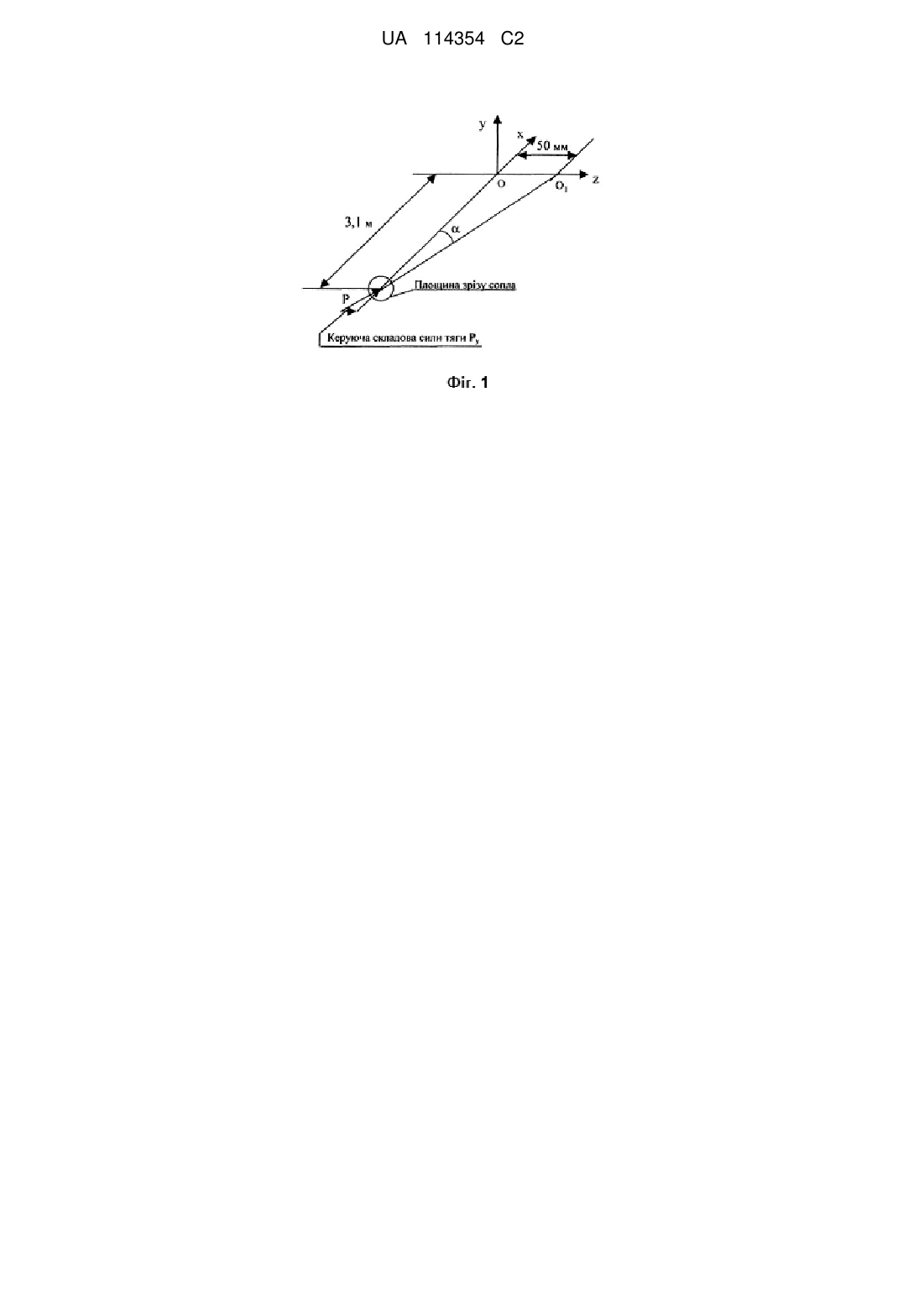
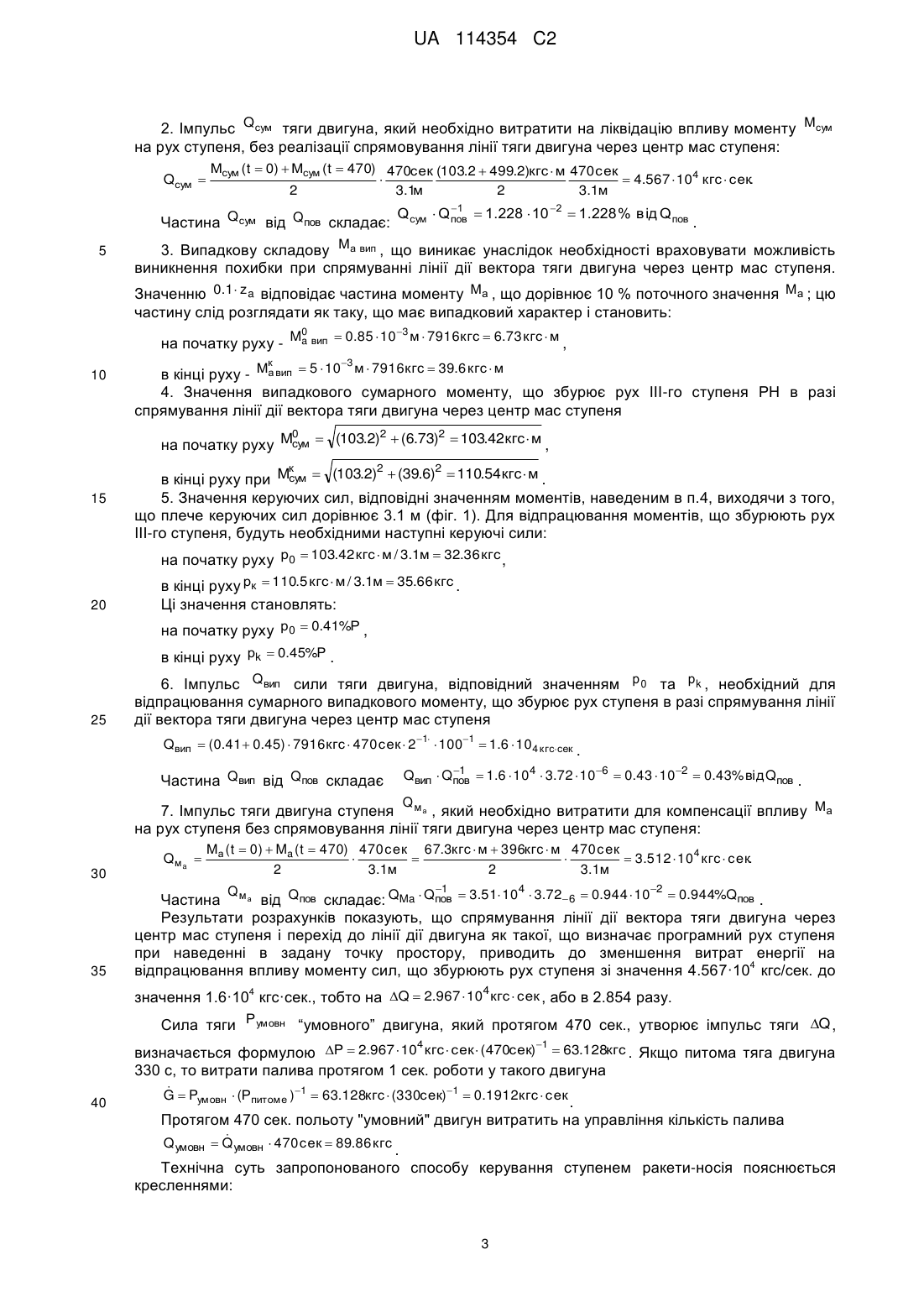
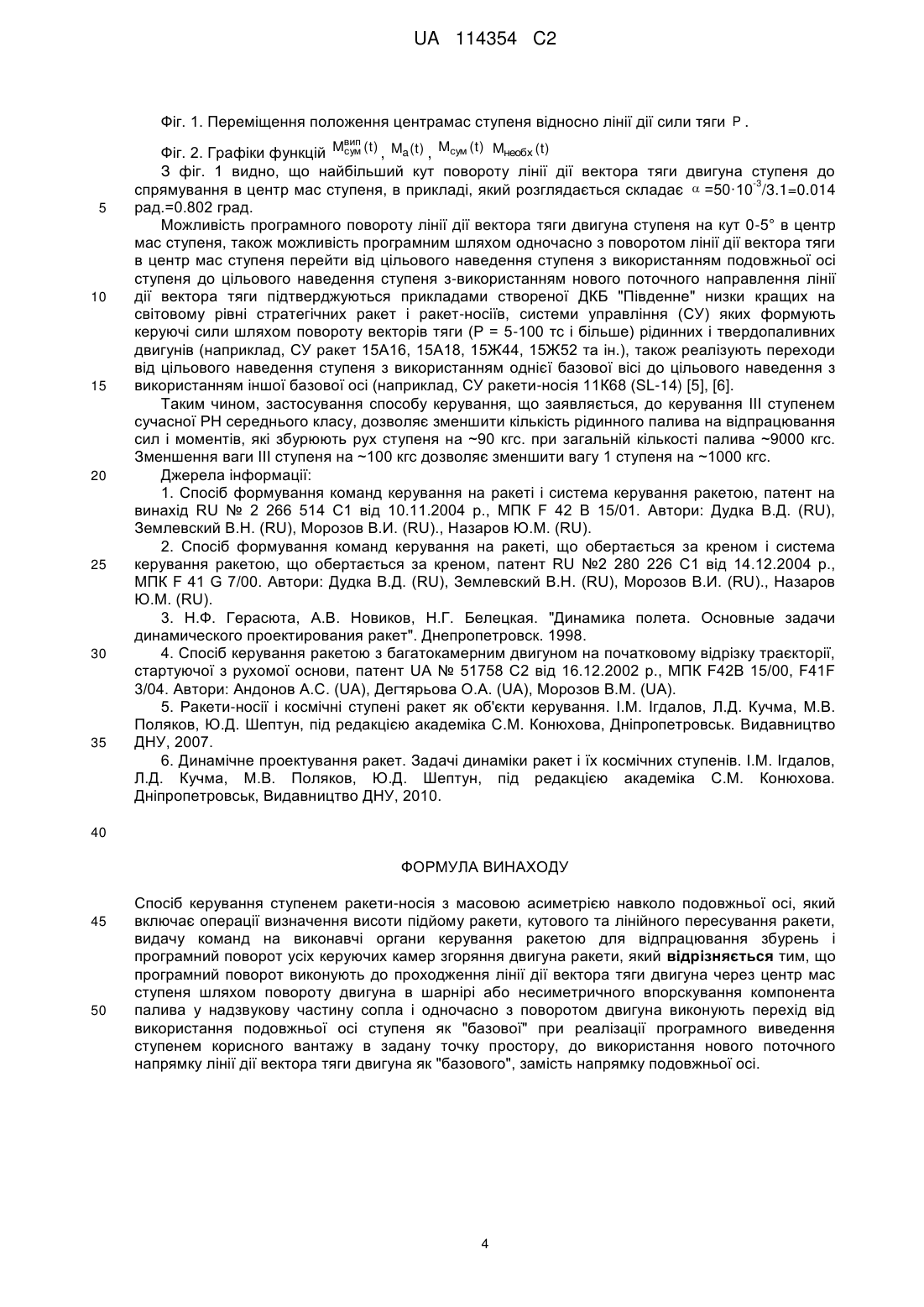
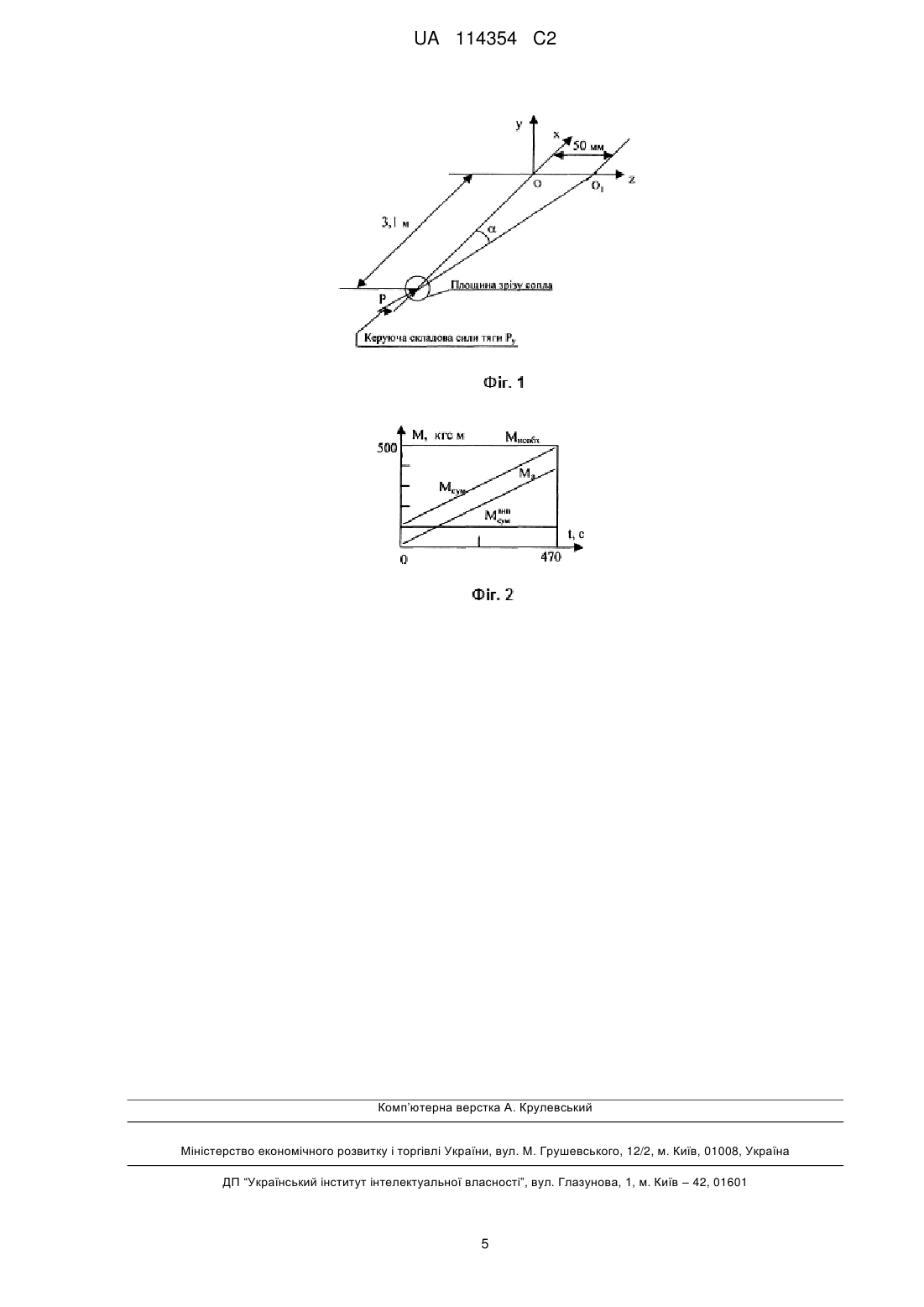
Реферат: Винахід належить до ракетно-космічної техніки, а саме до способів керування космічними ступенями ракет-носіїв з масовою асиметрією щодо подовжньої осі. Спосіб включає операції визначення висоти підйому ракети, кутового та лінійного пересування ракети, видачу команд на виконавчі органи керування ракетою для відпрацювання збурень і програмний поворот усіх керуючих камер згоряння двигуна ракети. З метою вдосконалення способу, програмний поворот виконують до проходження лінії дії вектора тяги двигуна через центр мас ступеня шляхом повороту двигуна в шарнірі або несиметричного впорскування компонента палива у надзвукову частину сопла. Також, одночасно з поворотом двигуна, виконують перехід від використання подовжньої осі ступеня як "базової" при реалізації програмного виведення ступенем корисного вантажу в задану точку простору, до використання нового поточного напрямку лінії дії вектора тяги двигуна як "базового", замість напрямку подовжньої осі. UA 114354 C2 (12) UA 114354 C2 UA 114354 C2 5 10 15 20 25 30 35 40 45 50 Винахід стосується ракетно-космічної техніки, а більш конкретно способів керування космічними ступенями ракет-носіїв з масовою асиметрією щодо подовжньої осі. Відомий спосіб формування команд керування на ракеті і система керування ракетою [1], при якому в момент старту формують одиночний імпульс, який не дозволяє у кожному каналі проходження скорегованих сигналів, при цьому подовженість імпульсу, що формується, повинна бути не меншою сумарної величини постійної часу корегуючого фільтра і часу відсутності сигналів керування з моменту старту ракети. Відомий спосіб формування команд керування на ракеті, що обертається за креном, і система керування ракетою [2], при якому на ракеті формують з сигналу обертання лінеаризований сигнал, який з урахуванням кута крену ракети порівнюють з декодованими значеннями командних повідомлень відповідно за курсом і тангажем, і унаслідок порівняння формують команди керування ракетою. Відомий спосіб керування ракетою при її пусках зі стартової системи стаціонарного наземного комплексу [3], що включає операції визначення висоти підйому ракети, кутового і лінійного пересування, видачу команд на виконавчі органи керування ракетою, для відпрацьовування збурень. Недоліки способів в тому, що алгоритми формування команд керування не містять залежностей від зовнішніх сил і моментів, що збурюють рух ракети. Найбільш близьким за технічною суттю та результатом, який досягається, до способу, який заявляється, є спосіб керування ракетою з багатокамерним двигуном на стартовому відрізку траєкторії, що стартує з рухомої платформи [4] - прототип винаходу. Вадою цього способу є те, що в ньому не реалізуються певні можливості мінімізації енергії, яка витрачається системою керування ракетою на відпрацювання збурень. В основу винаходу поставлено задачу вдосконалити спосіб управління ракетою - прототип в напрямку мінімізації кількості енергії (кількості палива), яка витрачається системою управління на відпрацювання збурень. Задача вирішується способом, у відповідності з яким: програмний поворот двигуна ракети виконують до проходження лінії дії вектора тяги двигуна через центр мас ступеня шляхом повороту двигуна в шарнірі або несиметричного вприскування компонента палива у надзвукову частину сопла; одночасно з поворотом вектора тяги двигуна виконують перехід від використання подовжньої осі ступеня як "базової" при реалізації програмного виведення ступенем корисного вантажу в задану точку простору, до використання нового поточного напрямку лінії дії вектора тяги ступеня як "базового" замість напрямку подовжньої осі. Технічний результат, що досягається завдяки використанню способу, який заявляється суттєве зменшення витрат енергії на відпрацювання збурень параметрів руху. Як прикладу розраховується ефект від застосування зазначеного способу при керуванні рухом ІІІ-го ступеня сучасної РН з такими характеристиками [6]. 1. Номінальна тяга двигуна в пустоті - 7916 кгс, питома тяга - 330 сек, час роботи, с, - 470 с. 2. Зсув геометричної осі камери двигуна відносно осі рами, мм, не більше - 2. 3. Відхилення від перпендикулярності осі камери двигуна до площини стикування двигуна з рамою, під навантаженням, кутові хвилини, не більше - 15' (~0.25°). 4. Масова асиметрія, м, не більше: - на початку руху ут=0.003 м, zт=0.0085 м, - в кінці руху ут=0.017 м, zт=0.05 м. 5. Відстань від площини зрізу сопла до центру мас ступеня - 3.1 м. Коректність методу розрахунку сил і моментів, що збурюють рух ступенів РН, підтверджена результатами обробки матеріалів льотних випробувань понад 150 ракет і ракет-носіїв різного класу розробки ДКБ "Південне" [5]. Сумарні величини сили F і моменту M від технологічних похибок виготовлення і монтажу ракети і рушійної установки, пружної деформації рами рушійної установки визначаються як геометричні суми випадкових складових Fi , M j [5]. k n F Fi2 M M 2 j j 1 , (1) Несиметричність масового компонування ракети відносно подовжньої осі обумовлює наявність детермінованого зміщення z a центру мас ступеня ракети за нормаллю до її i 1 55 подовжньої осі. Як наслідок, виникає детермінований момент Ma P za сили тяги ракетного двигуна відносно центру мас ракети, що збурює рух ракети. Зміщення z a звичайно близьке до 1 UA 114354 C2 5 нуля, якщо баки ступеня заповнені рідинним паливом, і досягає найбільшого значення, якщо баки порожні. З урахуванням викладеного, формулу для визначення моменту M , обумовленого технологічними похибками виготовлення і монтажу ракети і рушійної установки, пружною деформацією рами рушійної установки, масовою асиметрією ракети відносно подовжньої осі, слід записати так: k M Ma M P z a M2 . (2) j j1 10 15 20 Таким чином, сила і моменти, що збурюють рух ступеня, визначаються з урахуванням невипадкового і випадкового характеру окремих складових, але без використання того, що модуль і напрямок дії моменту Ma відомі (з достатньою точністю можливих експериментальних вимірів та чисельних розрахунків розміру z a ). Наведеним значенням похибок виготовлення, складання III-го ступеня ракети та її двигунної установки відповідають наступні значення складових сил і моментів, що збурюють рух ступеня: випадкові складові збурюючий момент від сили тяги двигуна відносно центра мас ступеня, обумовлений зсувом осі камери двигуна відносно осі рами перехідника M1 7916 кгс 0.002 м 15.8 кгс м , збурююча сила від сили тяги двигуна, обумовлена відхиленням геометричної осі камери двигуна від перпендикулярності до площини стикування двигуна з рамою-перехідником FI 7916 кгс sin 0.25 0 33 кгс , збурюючий момент від сили FI відносно центра мас ступеня на плечі 3.1 м (фіг.1) M2 33 кгс 3.1м 102 кгс м , сумарний збурюючий момент 25 30 35 2 Мвип М1 м2 103 .2 кгс м . сум 2 детермінована складова збурюючий момент від сили тяги маршового двигуна відносно центра мас ступеня, обумовлений масовою асиметрією: на початку руху Ма (t 0) 7916 кгс 0.0085 м 67.3 кгс м , в кінці руху Ма t 470 ) 7916 кгс 0.05 м 396 кгс м . Момент Ма лінійно збільшується за часом унаслідок збільшення масової асиметрії від 0.008 м до 0.05 м за причини випорожнення паливних баків ступеня від початку до кінця руху. Переміщення центра мас ступеня відносно лінії дії сили тяги Р пояснюється кресленнями. На фіг. 1 Oxyz - зв'язана система координат, точка O поєднана з центром мас ступеня в момент t 0 , точка O1 - з центром мас в момент t 470 c , P - вектор тяги двигуна. Кут змінюється від значення 0085 м (3.1м)1 2.581 10 3 рад 0.1148 0 в початковий момент польоту до значення 0.05м (3.1м)1 0.016 10 3 рад 0.917 0 в момент t 470 c . Розрахунки показують, що на початку руху ІІІ-го ступеня, випадкові збурюючі моменти, більше детермінованих, в кінці руху - суттєво менші (в 4 рази). Найбільше значення моменту, що збурює рух ступеня, визначається як арифметична сума складових: сумарного випадкового 40 45 Mвип сум та детермінованого Ма . У випадку, що розглядається, маємо наступні значення сумарного моменту, який збурює рух ступеня, розраховані у відповідності з міжвідомчою методикою [5] за формулою Мсум Мвип Ма : сум на початку руху - 103.2 кгс·м, в кінці руху - 103.2 кгс·м + 396кгс·м = 499.2кгс·м ≈ 500кгс·м. Останнє значення є суттєво більшим, ніж необхідно на значній за часом ділянці польоту вип ступеня. Графіки функцій Mсум ( t ) , M(t) , Mсум ( t ) Mнеобх (t ) , представлені на фіг. 2. Визначимо наступне 1. Повне значення імпульсу Qпов , Р двигуна III-го ступеня ракети протягом штатного часу 6 роботи двигуна - 470 сек. Qпов =7916 кгс · 470сек.=3.72-10 кгс · сек. 2 UA 114354 C2 2. Імпульс Qсум тяги двигуна, який необхідно витратити на ліквідацію впливу моменту Мсум на рух ступеня, без реалізації спрямовування лінії тяги двигуна через центр мас ступеня: Qсум Мсум (t 0) Мсум (t 470) 470сек (103.2 499.2)кгс м 470 сек 4.567 104 кгс сек. 2 3.1м 2 3.1м 1 Q Qпов 1.228 10 2 1.228 % від Qпов Частина Qсум від Qпов складає: сум . 5 3. Випадкову складову Ма вип , що виникає унаслідок необхідності враховувати можливість виникнення похибки при спрямуванні лінії дії вектора тяги двигуна через центр мас ступеня. Значенню 0.1 z a відповідає частина моменту Ма , що дорівнює 10 % поточного значення Ма ; цю частину слід розглядати як таку, що має випадковий характер і становить: 0 3 на початку руху - Ma вип 0.85 10 м 7916кгс 6.73 кгс м , 3 к 10 в кінці руху - Ма вип 5 10 м 7916кгс 39.6 кгс м 4. Значення випадкового сумарного моменту, що збурює рух ІІІ-го ступеня РН в разі спрямування лінії дії вектора тяги двигуна через центр мас ступеня 0 2 2 на початку руху Мсум (103.2) (6.73) 103.42кгс м , к 15 2 2 в кінці руху при Мсум (103.2) (39.6) 110.54 кгс м . 5. Значення керуючих сил, відповідні значенням моментів, наведеним в п.4, виходячи з того, що плече керуючих сил дорівнює 3.1 м (фіг. 1). Для відпрацювання моментів, що збурюють рух ІІІ-го ступеня, будуть необхідними наступні керуючі сили: на початку руху р0 103.42 кгс м / 3.1м 32.36 кгс , 20 в кінці руху рк 110.5 кгс м / 3.1м 35.66 кгс . Ці значення становлять: на початку руху р0 0.41%Р , в кінці руху рk 0.45%P . 25 6. Імпульс Qвип сили тяги двигуна, відповідний значенням р 0 та рk , необхідний для відпрацювання сумарного випадкового моменту, що збурює рух ступеня в разі спрямування лінії дії вектора тяги двигуна через центр мас ступеня Qвип (0.41 0.45) 7916 кгс 470 сек 2 1 1001 1.6 104 кгссек Частина Qвип від Qпов складає 1 Qвип Qпов . 1.6 10 3.72 106 0.43 102 0.43% від Qпов . 4 Q 7. Імпульс тяги двигуна ступеня м а , який необхідно витратити для компенсації впливу Ма на рух ступеня без спрямовування лінії тяги двигуна через центр мас ступеня: 30 Qм a Ма ( t 0) Ma ( t 470) 470 сек 67.3кгс м 396кгс м 470 сек 3.512 104 кгс сек. 2 3.1м 2 3.1м 1 Q 35 2 4 Частина м а від Qпов складає: QMa Qпов 3.51 10 3.72 6 0.944 10 0.944%Qпов . Результати розрахунків показують, що спрямування лінії дії вектора тяги двигуна через центр мас ступеня і перехід до лінії дії двигуна як такої, що визначає програмний рух ступеня при наведенні в задану точку простору, приводить до зменшення витрат енергії на 4 відпрацювання впливу моменту сил, що збурюють рух ступеня зі значення 4.567·10 кгс/сек. до 4 4 значення 1.6·10 кгс·сек., тобто на Q 2.967 10 кгс сек , або в 2.854 разу. Сила тяги Р умовн “умовного” двигуна, який протягом 470 сек., утворює імпульс тяги Q , 1 4 визначається формулою P 2.967 10 кгс сек (470сек) 63.128кгс . Якщо питома тяга двигуна 330 с, то витрати палива протягом 1 сек. роботи у такого двигуна 40 G Pумовн (Рпитоме )1 63.128кгс (330сек)1 0.1912кгс сек . Протягом 470 сек. польоту "умовний" двигун витратить на управління кількість палива Q умовн Q умовн 470 сек 89.86 кгс . Технічна суть запропонованого способу керування ступенем ракети-носія пояснюється кресленнями: 3 UA 114354 C2 Фіг. 1. Переміщення положення центрамас ступеня відносно лінії дії сили тяги Р . вип 5 10 15 20 25 30 35 Фіг. 2. Графіки функцій Mсум ( t ) , Ma (t ) , Mсум ( t ) Mнеобх (t ) З фіг. 1 видно, що найбільший кут повороту лінії дії вектора тяги двигуна ступеня до -3 спрямування в центр мас ступеня, в прикладі, який розглядається складає =50·10 /3.1=0.014 рад.=0.802 град. Можливість програмного повороту лінії дії вектора тяги двигуна ступеня на кут 0-5° в центр мас ступеня, також можливість програмним шляхом одночасно з поворотом лінії дії вектора тяги в центр мас ступеня перейти від цільового наведення ступеня з використанням подовжньої осі ступеня до цільового наведення ступеня з-використанням нового поточного направлення лінії дії вектора тяги підтверджуються прикладами створеної ДКБ "Південне" низки кращих на світовому рівні стратегічних ракет і ракет-носіїв, системи управління (СУ) яких формують керуючі сили шляхом повороту векторів тяги (Р = 5-100 тс і більше) рідинних і твердопаливних двигунів (наприклад, СУ ракет 15А16, 15А18, 15Ж44, 15Ж52 та ін.), також реалізують переходи від цільового наведення ступеня з використанням однієї базової вісі до цільового наведення з використанням іншої базової осі (наприклад, СУ ракети-носія 11К68 (SL-14) [5], [6]. Таким чином, застосування способу керування, що заявляється, до керування ІІІ ступенем сучасної РН середнього класу, дозволяє зменшити кількість рідинного палива на відпрацювання сил і моментів, які збурюють рух ступеня на ~90 кгс. при загальній кількості палива ~9000 кгс. Зменшення ваги ІІІ ступеня на ~100 кгс дозволяє зменшити вагу 1 ступеня на ~1000 кгс. Джерела інформації: 1. Спосіб формування команд керування на ракеті і система керування ракетою, патент на винахід RU № 2 266 514 С1 від 10.11.2004 p., МПК F 42 В 15/01. Автори: Дудка В.Д. (RU), Землевский В.Н. (RU), Морозов В.И. (RU)., Назаров Ю.М. (RU). 2. Спосіб формування команд керування на ракеті, що обертається за креном і система керування ракетою, що обертається за креном, патент RU №2 280 226 С1 від 14.12.2004 р., МПК F 41 G 7/00. Автори: Дудка В.Д. (RU), Землевский В.Н. (RU), Морозов В.И. (RU)., Назаров Ю.М. (RU). 3. Н.Ф. Герасюта, А.В. Новиков, Н.Г. Белецкая. "Динамика полета. Основные задачи динамического проектирования ракет". Днепропетровск. 1998. 4. Спосіб керування ракетою з багатокамерним двигуном на початковому відрізку траєкторії, стартуючої з рухомої основи, патент UA № 51758 С2 від 16.12.2002 p., МПК F42В 15/00, F41F 3/04. Автори: Андонов А.С. (UA), Дегтярьова О.А. (UA), Морозов В.М. (UA). 5. Ракети-носії і космічні ступені ракет як об'єкти керування. І.М. Ігдалов, Л.Д. Кучма, М.В. Поляков, Ю.Д. Шептун, під редакцією академіка С.М. Конюхова, Дніпропетровськ. Видавництво ДНУ, 2007. 6. Динамічне проектування ракет. Задачі динаміки ракет і їх космічних ступенів. І.М. Ігдалов, Л.Д. Кучма, М.В. Поляков, Ю.Д. Шептун, під редакцією академіка С.М. Конюхова. Дніпропетровськ, Видавництво ДНУ, 2010. 40 ФОРМУЛА ВИНАХОДУ 45 50 Спосіб керування ступенем ракети-носія з масовою асиметрією навколо подовжньої осі, який включає операції визначення висоти підйому ракети, кутового та лінійного пересування ракети, видачу команд на виконавчі органи керування ракетою для відпрацювання збурень і програмний поворот усіх керуючих камер згоряння двигуна ракети, який відрізняється тим, що програмний поворот виконують до проходження лінії дії вектора тяги двигуна через центр мас ступеня шляхом повороту двигуна в шарнірі або несиметричного впорскування компонента палива у надзвукову частину сопла і одночасно з поворотом двигуна виконують перехід від використання подовжньої осі ступеня як "базової" при реалізації програмного виведення ступенем корисного вантажу в задану точку простору, до використання нового поточного напрямку лінії дії вектора тяги двигуна як "базового", замість напрямку подовжньої осі. 4 UA 114354 C2 Комп’ютерна верстка А. Крулевський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F02K 9/80, F42B 15/01
Мітки: спосіб, керування, ступенем, ракети-носія
Код посилання
<a href="https://ua.patents.su/7-114354-sposib-keruvannya-stupenem-raketi-nosiya.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування ступенем ракети-носія</a>
Спосіб підготовки ракети-носія до пуску
Номер патенту: 79644
Опубліковано: 25.04.2013
Автори: Пахомов Альберт Васильович, Мокін Олександр Васильович, Мокін Андрій Олександрович, Варяничко Геннадій Володимирович, Соколов Євген Іванович, Колесов Микола Євгенович
МПК: F42B 15/00, B64G 5/00
Мітки: ракети-носія, спосіб, підготовки, пуску
Формула / Реферат:
1. Спосіб підготовки ракети-носія до пуску, який ґрунтується на штатних продувках двигуна першого ступеня ракети-носія до команди "контакт підйому", котрі містять підготовчі продувки повітрям бортової заправної арматури і двигуна по лінії пального та основних продувок азотом хвостового відсіку і двигуна по лінії пального, а в разі аварійного вимкнення двигуна - його нештатні продувки азотом по лініях пального і окислювача, який...
Спосіб рятування пілотованого космічного корабля з аварійної ракети-носія
Номер патенту: 20362
Опубліковано: 15.01.2007
Автори: Зиков Микола Єфимович, Морозов Олег Дмитрович, Мокін Олександр Васильович, Мокін Андрій Олександрович, Шашин Микола Митрофанович, Кулігін Анатолій Михайлович
МПК: F42B 15/00, B64G 1/00
Мітки: корабля, пілотованого, ракети-носія, спосіб, космічного, аварійної, рятування
Формула / Реферат:
Спосіб рятування пілотованого космічного корабля з аварійної ракети-носія, що включає відділення пілотованого космічного корабля від ракети-носія при працюючій маршовій рушійній установці ракети-носія, яка рухається з кутом атаки, і запускання рушійної установки системи аварійного рятування пілотованого космічного корабля, який відрізняється тим, що перед відділенням пілотованого космічного корабля вимикають маршову рушійну установку...
Спосіб регулювання параметрів кутового руху ракети-носія космічного апарата
Номер патенту: 83861
Опубліковано: 26.08.2008
Автори: Манойленко Олександр Олексійович, Шептун Юрій Дмитрович
МПК: B64G 1/24, G05B 15/00
Мітки: апарата, параметрів, спосіб, регулювання, кутового, ракети-носія, космічного, руху
Формула / Реферат:
Спосіб регулювання параметрів кутового руху ракети-носія космічного апарата шляхом вимірювання кутових швидкостей та кутів тангажа, рискання і крену, порівняння виміряних значень з заданими, формування основних сигналів керування ракетою згідно з помилками регулювання, який відрізняється тим, що на кожному такті керування ракетою з моменту відключення рухомої установки і до моменту відділення космічного апарата формують в каналах тангажа і...
Пристрій з детонаційним ракетним двигуном для гальмування космічного ступеня ракети-носія
Номер патенту: 104833
Опубліковано: 25.02.2016
Автори: Коваленко Тит Олександрович, Кіріченко Олександр Олегович, Коваленко Галина Миколаївна, Коваленко Микола Дмитрович, Горяна Ольга Гарріївна, Ігнатьєв Олександр Дмитрович
МПК: F02K 9/10, F02K 9/95, F02K 9/00
Мітки: ракетним, двигуном, гальмування, детонаційним, пристрій, ракети-носія, ступеня, космічного
Формула / Реферат:
Пристрій з детонаційним ракетним двигуном для гальмування космічного ступеня ракети-носія, що містить в собі камеру згоряння, споряджену зарядом твердого палива, сопловий устрій для прискорення газового потоку, блок керування запуском двигуна, силову платформу для розміщення складових частин двигуна та сприймання сили тяги, який відрізняється тим, що камера згоряння, виготовлена кільцевою тороїдальної форми з боковими циліндричними стінками...
Спосіб приведення у вихідний стан ракети-носія при пуску, що не відбувся
Номер патенту: 47331
Опубліковано: 17.06.2002
Автори: Лавриненко Борис Михайлович, Агарков Анатолій Васильович, Соколова Валентина Петрівна, Федоров Володимир Миколайович, Мокін Олександр Васильович
Мітки: спосіб, ракети-носія, вихідній, приведення, відбувся, стан, пуску
Формула / Реферат:
Спосіб приведення у вихідний стан ракети-носія при пуску, що не відбувся, що містить підготовчі операції з ракетою-носієм до пуску, запускання двигуна, розфіксацію ракети-носія, вимкнення двигуна при необхідності, зливання з баків компонентів палива й продування трактів рушійної установки, який відрізняється тим, що у ньому продування трактів рушійної установки після зливання пального з баків проводять тиском газів наддуву з баків...
Попередній патент: Переносний пристрій для очищення води
Наступний патент: Спосіб збільшення дальності дії системи багатоабонентної радіочастотної ідентифікації
Випадковий патент: Фіксатор для остеосинтезу при переломі шийки стегна