Датчик для вимірювання кутової швидкості об’єктів
Номер патенту: 115968
Опубліковано: 10.05.2017
Автори: Бітов Мирослав Валерійович, Плешка Тетяна Євгеніївна, Жовнір Микола Федорович, Олійник Остап Олегович, Іващук Анатолій Васильович, Законов Євгеній Сергійович, Писаренко Леонід Дмитрович

Формула / Реферат
Датчик для вимірювання кутової швидкості об'єкта, що містить перший п'єзоелектричний звукопровід, на поверхні якого розташовані два перетворювачі ПАХ, сполучені із змішувачем сигналів, над першим п'єзоелектричним звукопроводом із зазором розміщено другий п'єзоелектричний звукопровід з перетворювач ПАХ, з'єднаний з генератором гармонічних коливань, який відрізняється тим, що кільцевий п'єзоелектричний хвилевід ПАХ сполучений з концентратором ПАХ, на якому розміщено перетворювач ПАХ, з'єднаний з генератором гармонічних коливань, а над кільцевим п'єзоелектричним хвилеводом із зазором розміщена антена ПАХ, при цьому кільцевий ємнісний знімач вихідного сигналу антени, сполучено із підсилювачем, змішувачем сигналів, генератором гармонічних сигналів та фільтром різницевої частоти сигналів генератора та антени.
Текст
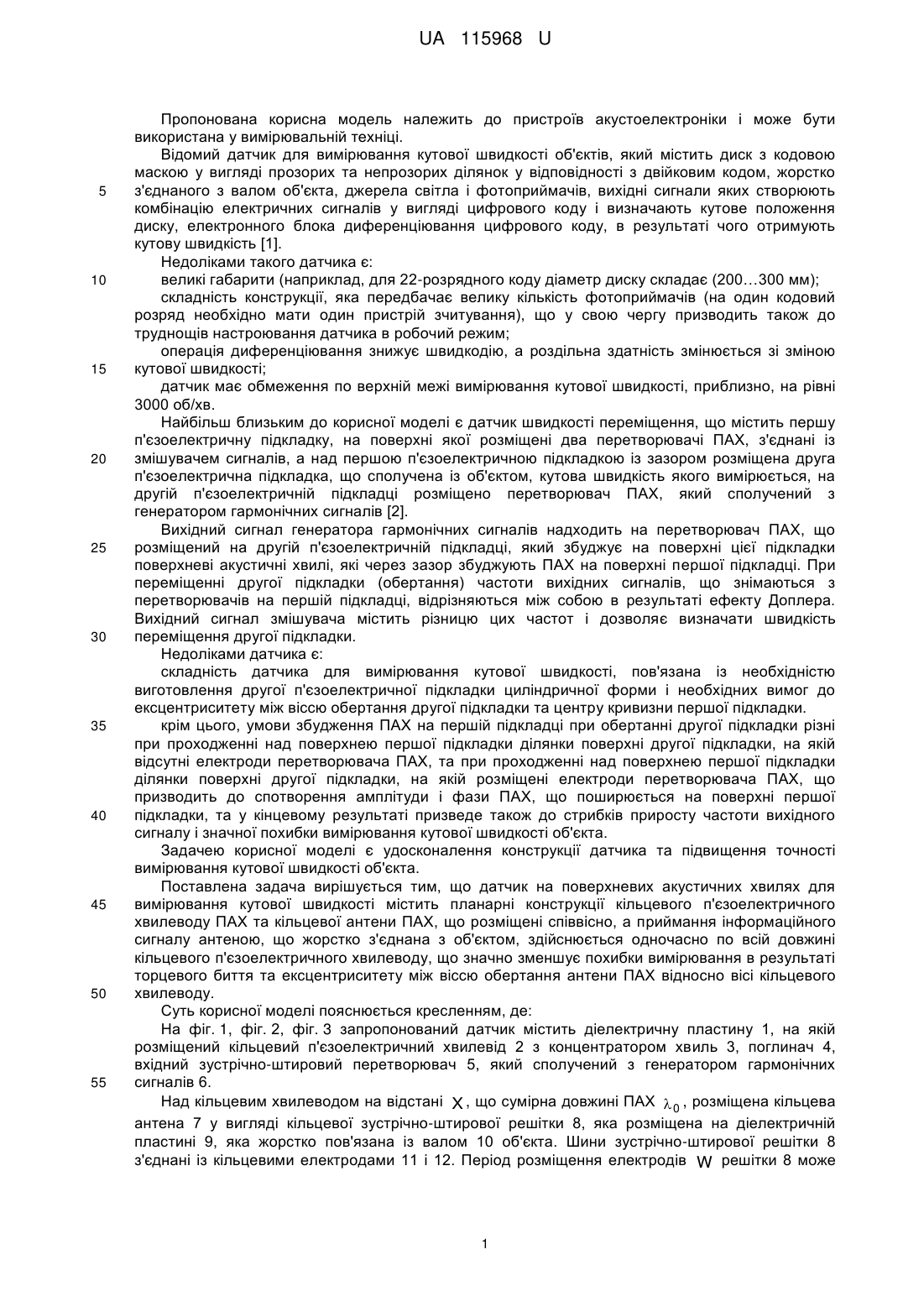
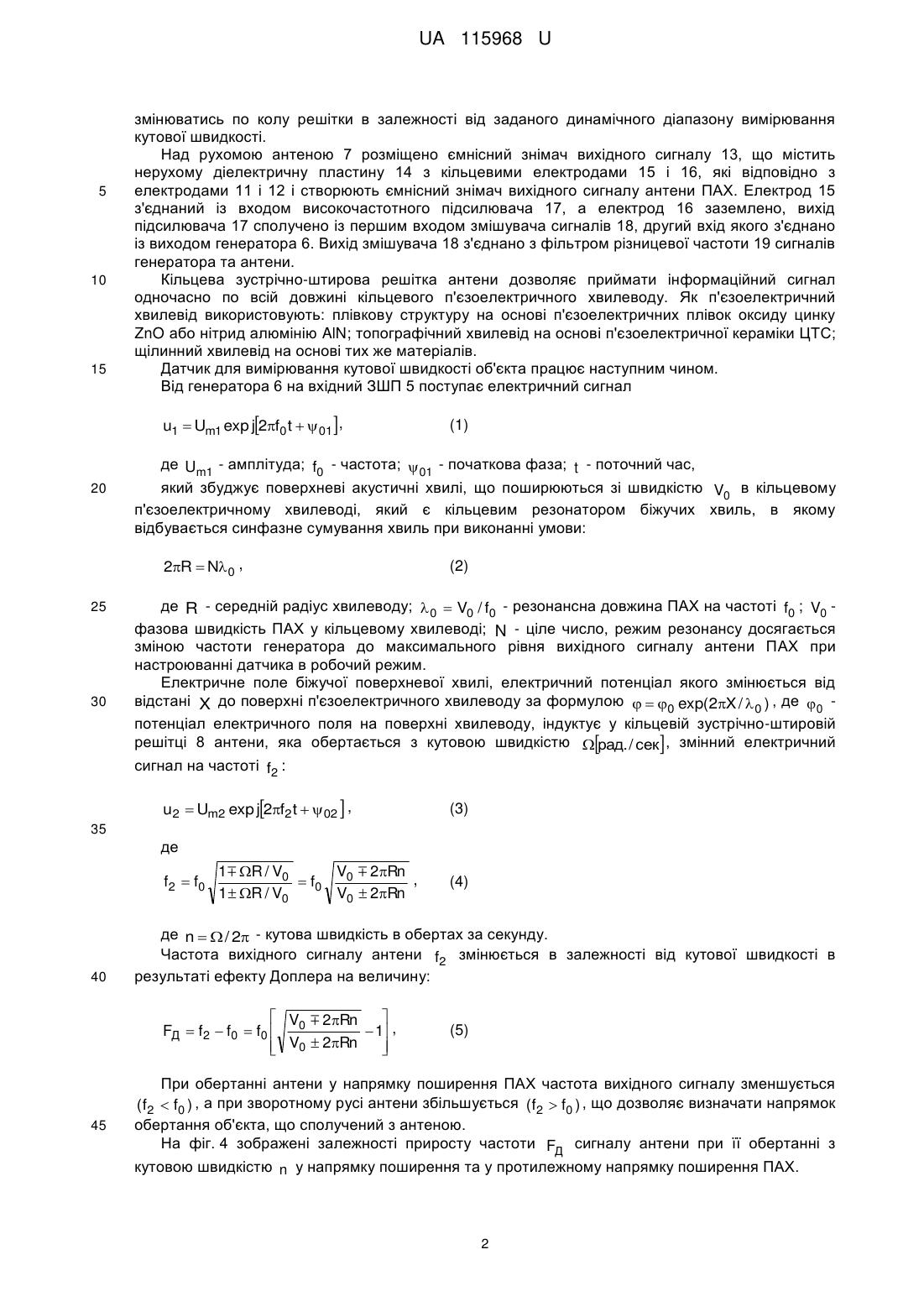
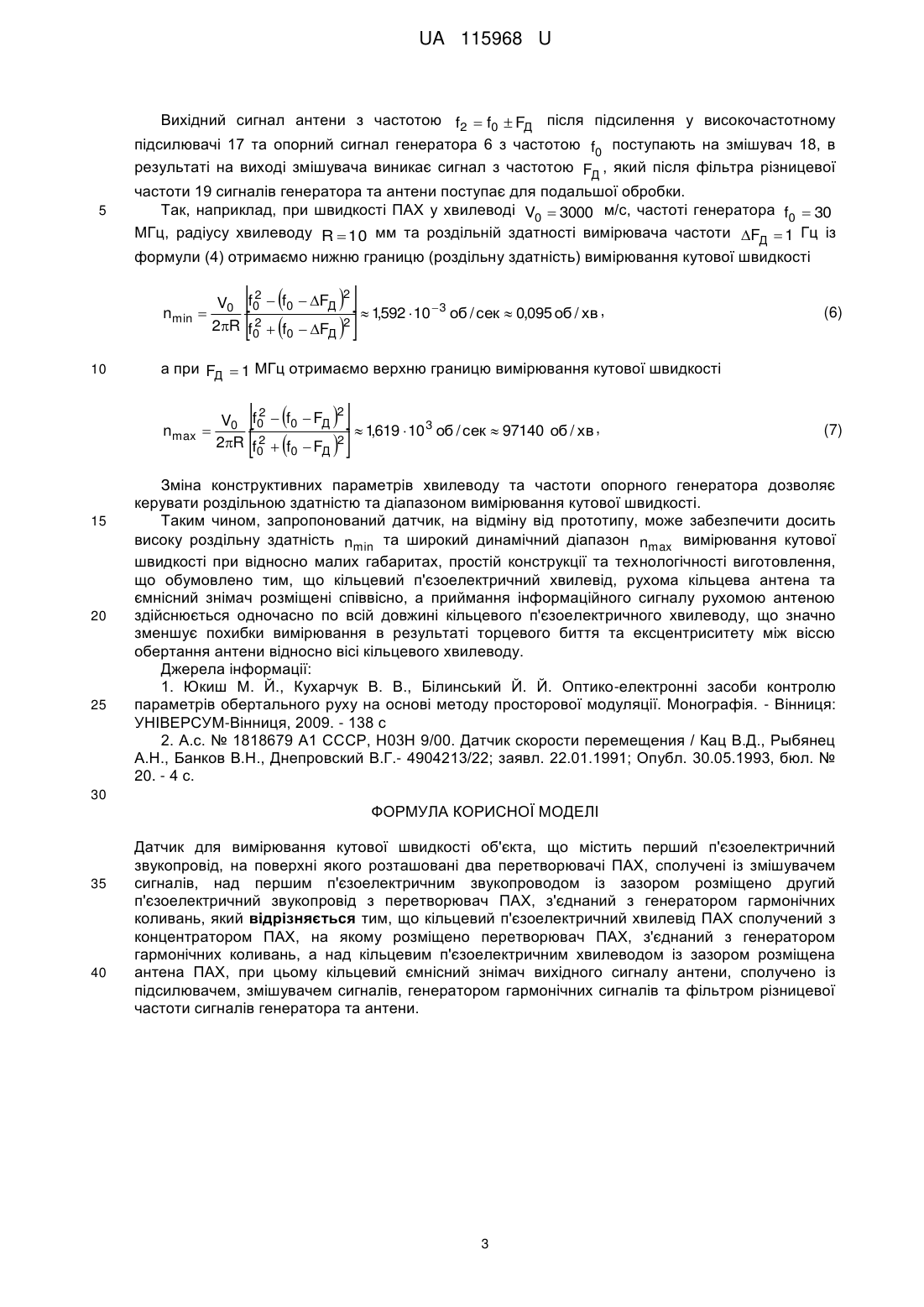
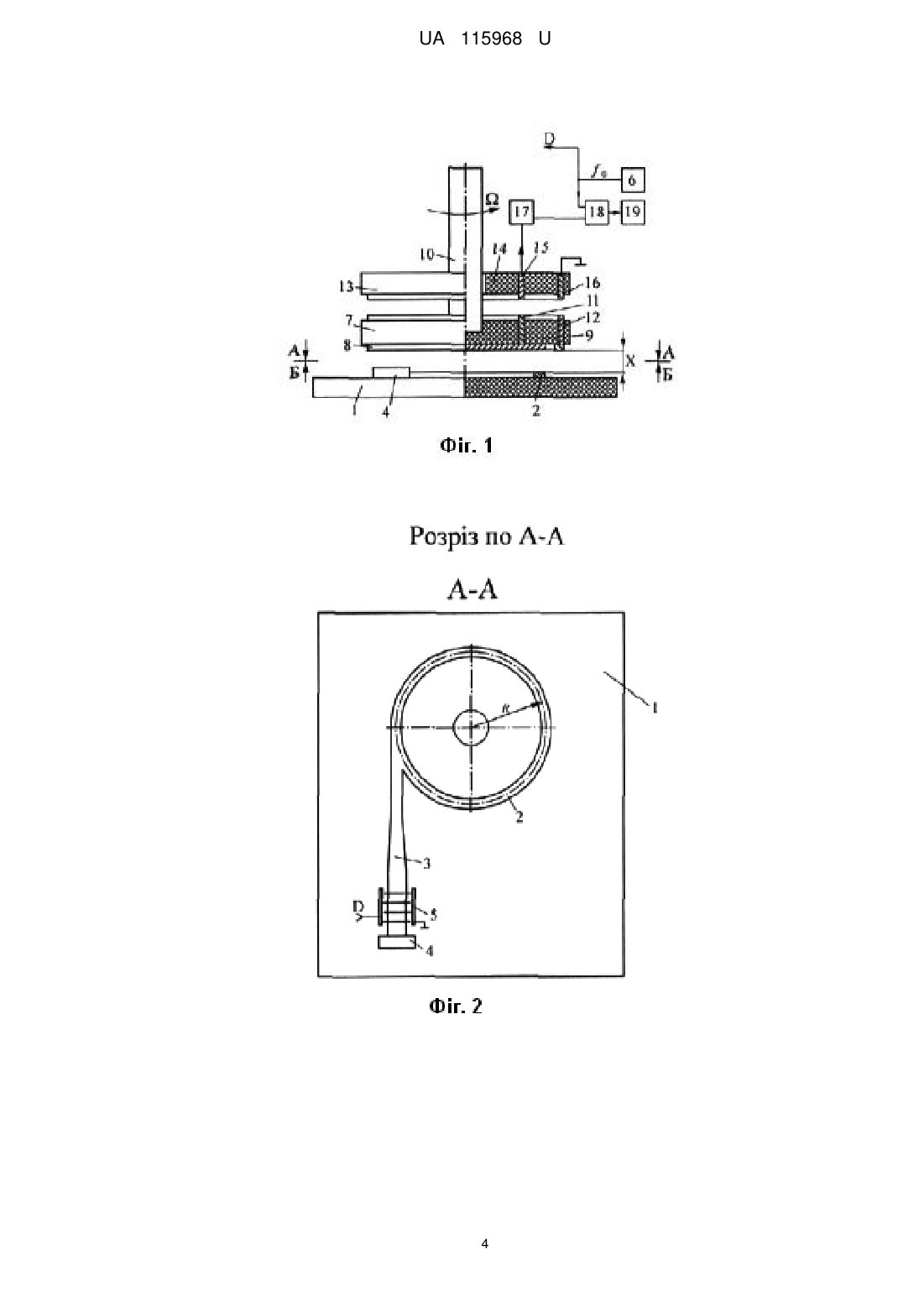
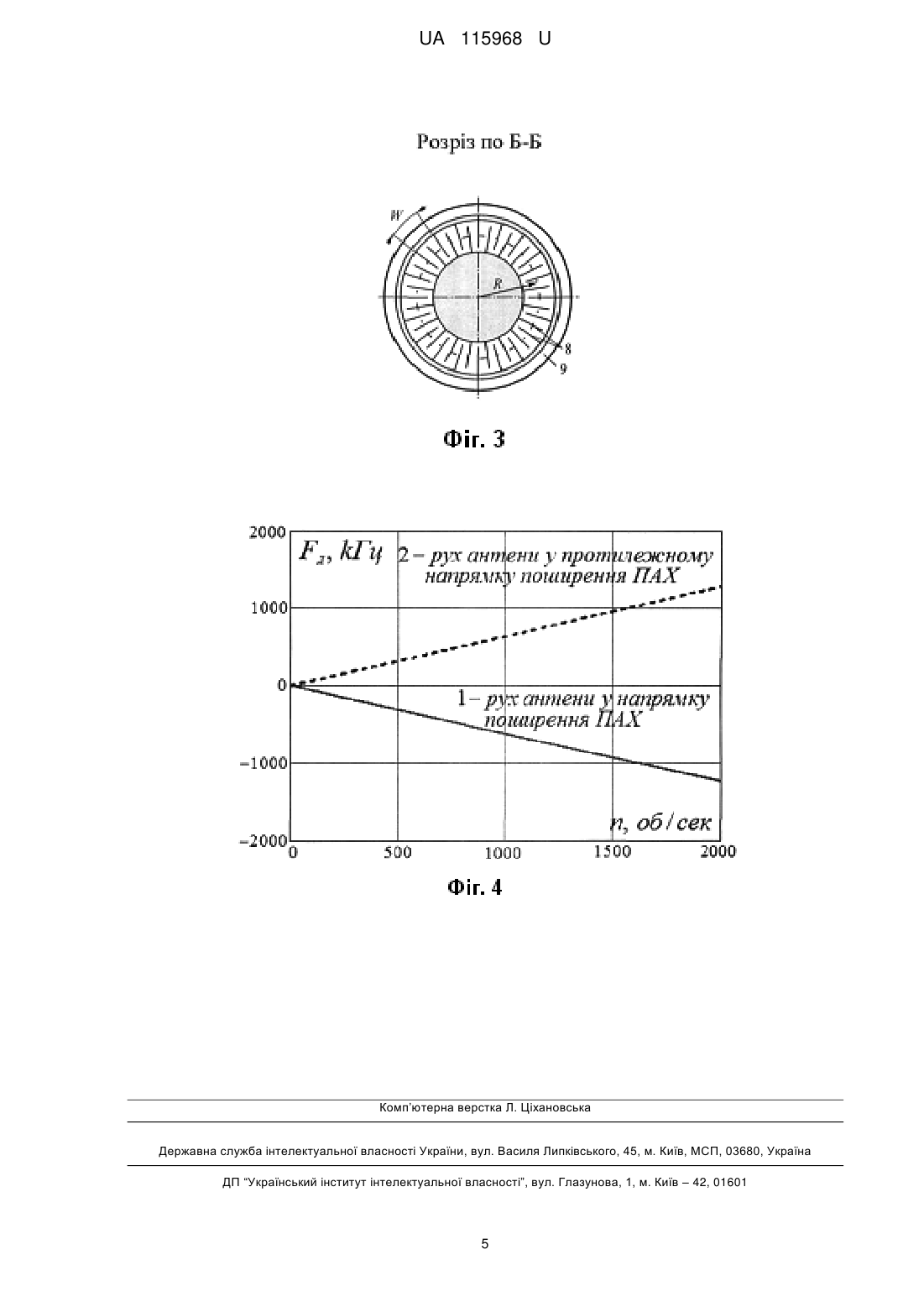
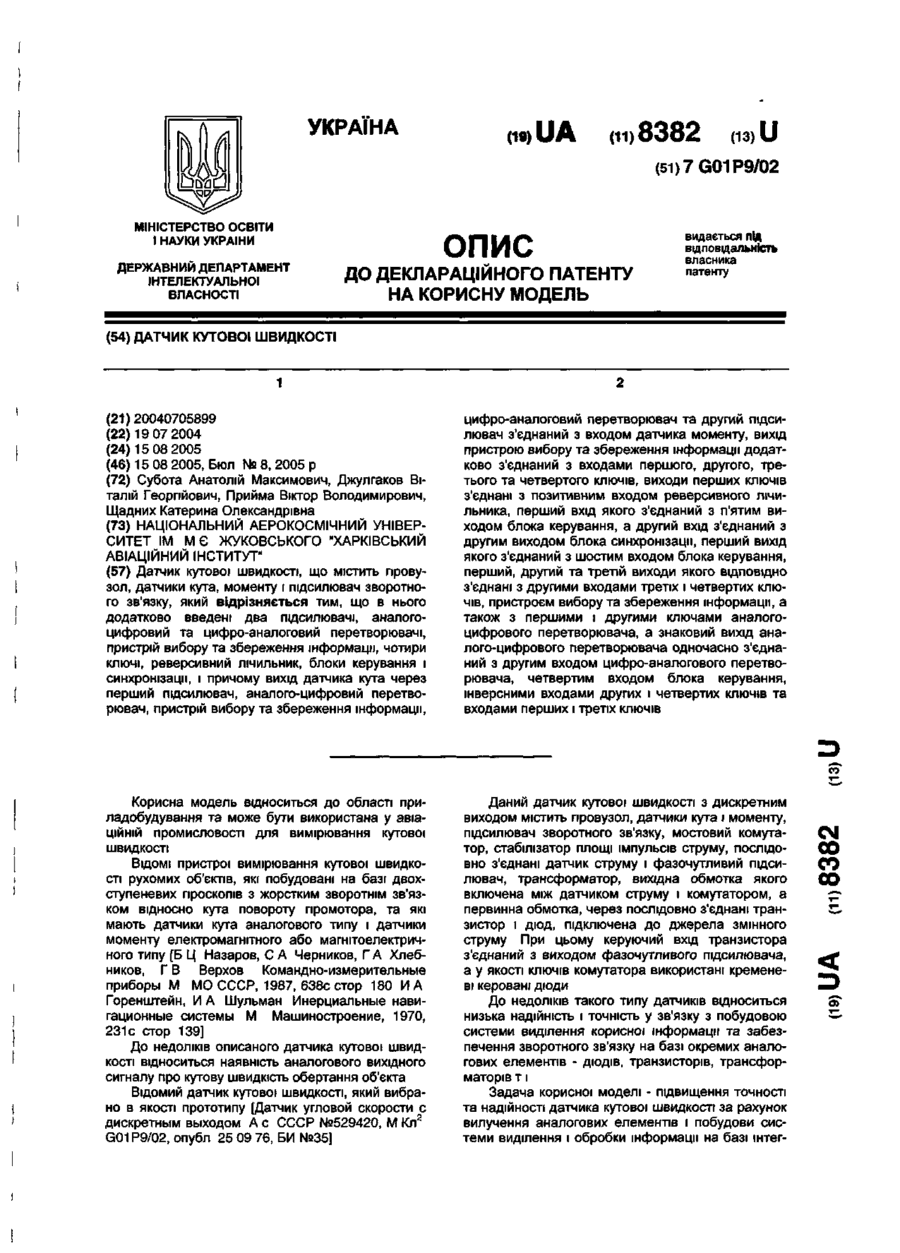
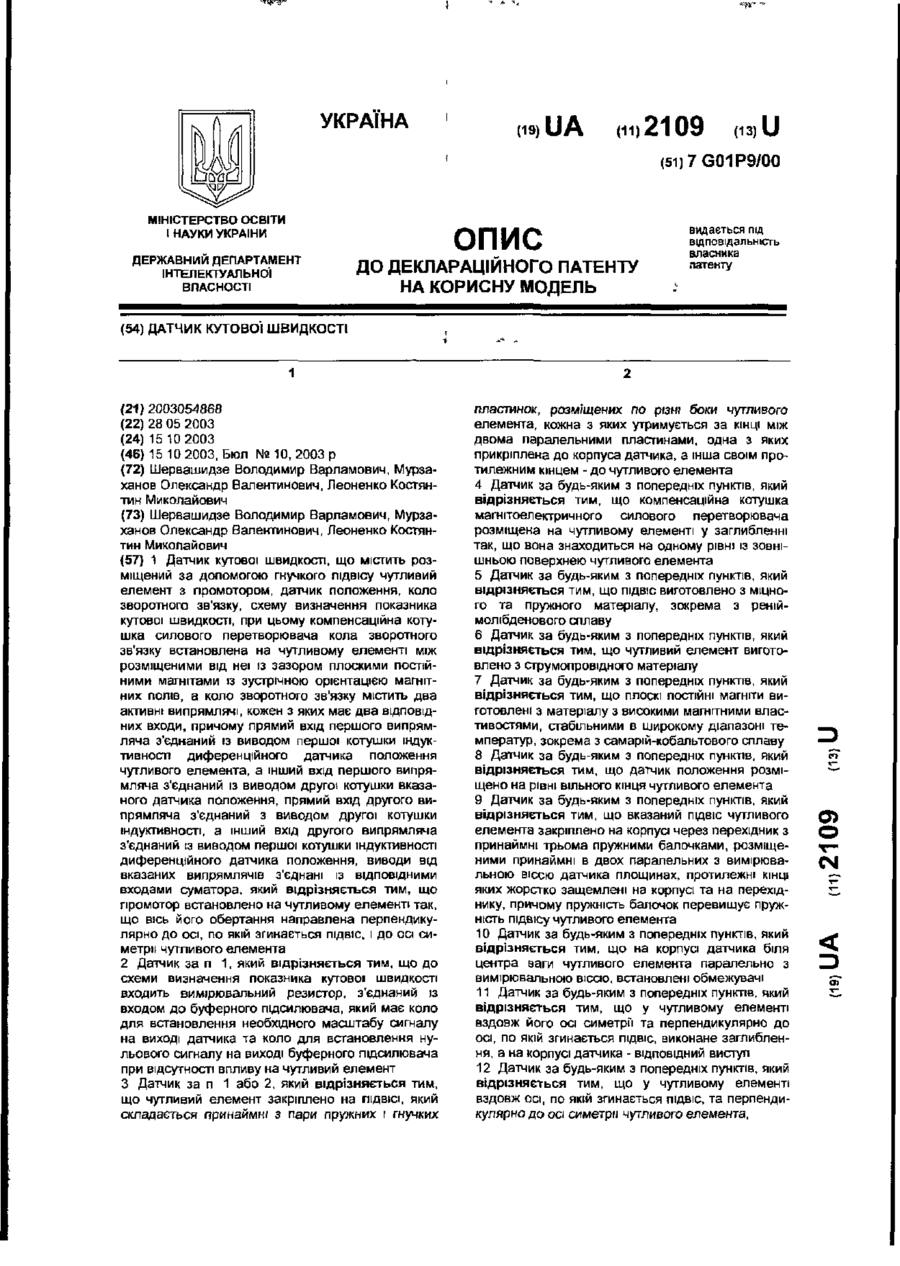
Реферат: Датчик для вимірювання кутової швидкості об'єкта містить перший п'єзоелектричний звукопровід, на поверхні якого розташовані два перетворювачі ПАХ, сполучені із змішувачем сигналів, над першим п'єзоелектричним звукопроводом із зазором розміщено другий п'єзоелектричний звукопровід з перетворювач ПАХ, з'єднаний з генератором гармонічних коливань. Кільцевий п'єзоелектричний хвилевід ПАХ сполучений з концентратором ПАХ, на якому розміщено перетворювач ПАХ, з'єднаний з генератором гармонічних коливань, а над кільцевим п'єзоелектричним хвилеводом із зазором розміщена антена ПАХ. При цьому кільцевий ємнісний знімач вихідного сигналу антени, сполучено із підсилювачем, змішувачем сигналів, генератором гармонічних сигналів та фільтром різницевої частоти сигналів генератора та антени. UA 115968 U (12) UA 115968 U UA 115968 U 5 10 15 20 25 30 35 40 45 50 55 Пропонована корисна модель належить до пристроїв акустоелектроніки і може бути використана у вимірювальній техніці. Відомий датчик для вимірювання кутової швидкості об'єктів, який містить диск з кодовою маскою у вигляді прозорих та непрозорих ділянок у відповідності з двійковим кодом, жорстко з'єднаного з валом об'єкта, джерела світла і фотоприймачів, вихідні сигнали яких створюють комбінацію електричних сигналів у вигляді цифрового коду і визначають кутове положення диску, електронного блока диференціювання цифрового коду, в результаті чого отримують кутову швидкість [1]. Недоліками такого датчика є: великі габарити (наприклад, для 22-розрядного коду діаметр диску складає (200…300 мм); складність конструкції, яка передбачає велику кількість фотоприймачів (на один кодовий розряд необхідно мати один пристрій зчитування), що у свою чергу призводить також до труднощів настроювання датчика в робочий режим; операція диференціювання знижує швидкодію, а роздільна здатність змінюється зі зміною кутової швидкості; датчик має обмеження по верхній межі вимірювання кутової швидкості, приблизно, на рівні 3000 об/хв. Найбільш близьким до корисної моделі є датчик швидкості переміщення, що містить першу п'єзоелектричну підкладку, на поверхні якої розміщені два перетворювачі ПАХ, з'єднані із змішувачем сигналів, а над першою п'єзоелектричною підкладкою із зазором розміщена друга п'єзоелектрична підкладка, що сполучена із об'єктом, кутова швидкість якого вимірюється, на другій п'єзоелектричній підкладці розміщено перетворювач ПАХ, який сполучений з генератором гармонічних сигналів [2]. Вихідний сигнал генератора гармонічних сигналів надходить на перетворювач ПАХ, що розміщений на другій п'єзоелектричній підкладці, який збуджує на поверхні цієї підкладки поверхневі акустичні хвилі, які через зазор збуджують ПАХ на поверхні першої підкладці. При переміщенні другої підкладки (обертання) частоти вихідних сигналів, що знімаються з перетворювачів на першій підкладці, відрізняються між собою в результаті ефекту Доплера. Вихідний сигнал змішувача містить різницю цих частот і дозволяє визначати швидкість переміщення другої підкладки. Недоліками датчика є: складність датчика для вимірювання кутової швидкості, пов'язана із необхідністю виготовлення другої п'єзоелектричної підкладки циліндричної форми і необхідних вимог до ексцентриситету між віссю обертання другої підкладки та центру кривизни першої підкладки. крім цього, умови збудження ПАХ на першій підкладці при обертанні другої підкладки різні при проходженні над поверхнею першої підкладки ділянки поверхні другої підкладки, на якій відсутні електроди перетворювача ПАХ, та при проходженні над поверхнею першої підкладки ділянки поверхні другої підкладки, на якій розміщені електроди перетворювача ПАХ, що призводить до спотворення амплітуди і фази ПАХ, що поширюється на поверхні першої підкладки, та у кінцевому результаті призведе також до стрибків приросту частоти вихідного сигналу і значної похибки вимірювання кутової швидкості об'єкта. Задачею корисної моделі є удосконалення конструкції датчика та підвищення точності вимірювання кутової швидкості об'єкта. Поставлена задача вирішується тим, що датчик на поверхневих акустичних хвилях для вимірювання кутової швидкості містить планарні конструкції кільцевого п'єзоелектричного хвилеводу ПАХ та кільцевої антени ПАХ, що розміщені співвісно, а приймання інформаційного сигналу антеною, що жорстко з'єднана з об'єктом, здійснюється одночасно по всій довжині кільцевого п'єзоелектричного хвилеводу, що значно зменшує похибки вимірювання в результаті торцевого биття та ексцентриситету між віссю обертання антени ПАХ відносно вісі кільцевого хвилеводу. Суть корисної моделі пояснюється кресленням, де: На фіг. 1, фіг. 2, фіг. 3 запропонований датчик містить діелектричну пластину 1, на якій розміщений кільцевий п'єзоелектричний хвилевід 2 з концентратором хвиль 3, поглинач 4, вхідний зустрічно-штировий перетворювач 5, який сполучений з генератором гармонічних сигналів 6. Над кільцевим хвилеводом на відстані X , що сумірна довжині ПАХ 0 , розміщена кільцева антена 7 у вигляді кільцевої зустрічно-штирової решітки 8, яка розміщена на діелектричній пластині 9, яка жорстко пов'язана із валом 10 об'єкта. Шини зустрічно-штирової решітки 8 з'єднані із кільцевими електродами 11 і 12. Період розміщення електродів W решітки 8 може 1 UA 115968 U 5 10 15 змінюватись по колу решітки в залежності від заданого динамічного діапазону вимірювання кутової швидкості. Над рухомою антеною 7 розміщено ємнісний знімач вихідного сигналу 13, що містить нерухому діелектричну пластину 14 з кільцевими електродами 15 і 16, які відповідно з електродами 11 і 12 і створюють ємнісний знімач вихідного сигналу антени ПАХ. Електрод 15 з'єднаний із входом високочастотного підсилювача 17, а електрод 16 заземлено, вихід підсилювача 17 сполучено із першим входом змішувача сигналів 18, другий вхід якого з'єднано із виходом генератора 6. Вихід змішувача 18 з'єднано з фільтром різницевої частоти 19 сигналів генератора та антени. Кільцева зустрічно-штирова решітка антени дозволяє приймати інформаційний сигнал одночасно по всій довжині кільцевого п'єзоелектричного хвилеводу. Як п'єзоелектричний хвилевід використовують: плівкову структуру на основі п'єзоелектричних плівок оксиду цинку ZnO або нітрид алюмінію AlN; топографічний хвилевід на основі п'єзоелектричної кераміки ЦТС; щілинний хвилевід на основі тих же матеріалів. Датчик для вимірювання кутової швидкості об'єкта працює наступним чином. Від генератора 6 на вхідний ЗШП 5 поступає електричний сигнал u1 Um1 exp j2f0 t 01, 20 де Um1 - амплітуда; f0 - частота; 01 - початкова фаза; t - поточний час, який збуджує поверхневі акустичні хвилі, що поширюються зі швидкістю V0 в кільцевому п'єзоелектричному хвилеводі, який є кільцевим резонатором біжучих хвиль, в якому відбувається синфазне сумування хвиль при виконанні умови: 2R N 0 , 25 30 (1) (2) де R - середній радіус хвилеводу; 0 V0 / f0 - резонансна довжина ПАХ на частоті f0 ; V0 фазова швидкість ПАХ у кільцевому хвилеводі; N - ціле число, режим резонансу досягається зміною частоти генератора до максимального рівня вихідного сигналу антени ПАХ при настроюванні датчика в робочий режим. Електричне поле біжучої поверхневої хвилі, електричний потенціал якого змінюється від відстані X до поверхні п'єзоелектричного хвилеводу за формулою 0 exp(2X / 0 ) , де 0 потенціал електричного поля на поверхні хвилеводу, індуктує у кільцевій зустрічно-штировій решітці 8 антени, яка обертається з кутовою швидкістю рад. / сек , змінний електричний сигнал на частоті f2 : u2 Um2 exp j2f2 t 02 , (3) 35 де f 2 f0 40 1 R / V0 V0 2Rn , f0 1 R / V0 V0 2Rn де n / 2 - кутова швидкість в обертах за секунду. Частота вихідного сигналу антени f2 змінюється в залежності від кутової швидкості в результаті ефекту Доплера на величину: V 2Rn FД f2 f0 f0 0 1 , V0 2Rn 45 (4) (5) При обертанні антени у напрямку поширення ПАХ частота вихідного сигналу зменшується (f2 f0 ) , а при зворотному русі антени збільшується (f2 f0 ) , що дозволяє визначати напрямок обертання об'єкта, що сполучений з антеною. На фіг. 4 зображені залежності приросту частоти FД сигналу антени при її обертанні з кутовою швидкістю n у напрямку поширення та у протилежному напрямку поширення ПАХ. 2 UA 115968 U Вихідний сигнал антени з частотою f2 f0 FД після підсилення у високочастотному підсилювачі 17 та опорний сигнал генератора 6 з частотою f0 поступають на змішувач 18, в результаті на виході змішувача виникає сигнал з частотою FД , який після фільтра різницевої 5 частоти 19 сигналів генератора та антени поступає для подальшої обробки. Так, наприклад, при швидкості ПАХ у хвилеводі V0 3000 м/с, частоті генератора f0 30 МГц, радіусу хвилеводу R 10 мм та роздільній здатності вимірювача частоти FД 1 Гц із формули (4) отримаємо нижню границю (роздільну здатність) вимірювання кутової швидкості nmin 10 20 25 f f 2 0 2 0 1,592 10 3 об / сек 0,095 об / хв , f0 FД 2 f0 FД 2 (6) а при FД 1 МГц отримаємо верхню границю вимірювання кутової швидкості nmax 15 V0 2R V0 2R f f 2 0 2 0 1,619 10 3 об / сек 97140 об / хв , f0 FД 2 f0 FД 2 (7) Зміна конструктивних параметрів хвилеводу та частоти опорного генератора дозволяє керувати роздільною здатністю та діапазоном вимірювання кутової швидкості. Таким чином, запропонований датчик, на відміну від прототипу, може забезпечити досить високу роздільну здатність nmin та широкий динамічний діапазон nmax вимірювання кутової швидкості при відносно малих габаритах, простій конструкції та технологічності виготовлення, що обумовлено тим, що кільцевий п'єзоелектричний хвилевід, рухома кільцева антена та ємнісний знімач розміщені співвісно, а приймання інформаційного сигналу рухомою антеною здійснюється одночасно по всій довжині кільцевого п'єзоелектричного хвилеводу, що значно зменшує похибки вимірювання в результаті торцевого биття та ексцентриситету між віссю обертання антени відносно вісі кільцевого хвилеводу. Джерела інформації: 1. Юкиш М. Й., Кухарчук В. В., Білинський Й. Й. Оптико-електронні засоби контролю параметрів обертального руху на основі методу просторової модуляції. Монографія. - Вінниця: УНІВЕРСУМ-Вінниця, 2009. - 138 с 2. А.с. № 1818679 А1 СССР, Н03Н 9/00. Датчик скорости перемещения / Кац В.Д., Рыбянец А.Н., Банков В.Н., Днепровский В.Г.- 4904213/22; заявл. 22.01.1991; Опубл. 30.05.1993, бюл. № 20. - 4 с. 30 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 Датчик для вимірювання кутової швидкості об'єкта, що містить перший п'єзоелектричний звукопровід, на поверхні якого розташовані два перетворювачі ПАХ, сполучені із змішувачем сигналів, над першим п'єзоелектричним звукопроводом із зазором розміщено другий п'єзоелектричний звукопровід з перетворювач ПАХ, з'єднаний з генератором гармонічних коливань, який відрізняється тим, що кільцевий п'єзоелектричний хвилевід ПАХ сполучений з концентратором ПАХ, на якому розміщено перетворювач ПАХ, з'єднаний з генератором гармонічних коливань, а над кільцевим п'єзоелектричним хвилеводом із зазором розміщена антена ПАХ, при цьому кільцевий ємнісний знімач вихідного сигналу антени, сполучено із підсилювачем, змішувачем сигналів, генератором гармонічних сигналів та фільтром різницевої частоти сигналів генератора та антени. 3 UA 115968 U 4 UA 115968 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: кутової, датчик, об'єктів, швидкості, вимірювання
Код посилання
<a href="https://ua.patents.su/7-115968-datchik-dlya-vimiryuvannya-kutovo-shvidkosti-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Датчик для вимірювання кутової швидкості об’єктів</a>
Датчик кутової швидкості
Номер патенту: 8382
Опубліковано: 15.08.2005
Автори: Субота Анатолій Максимович, Щадних Катерина Олександрівна, Прийма Віктор Володимирович, Джулгаков Віталій Георгійович
МПК: G01P 9/00
Мітки: датчик, кутової, швидкості
Формула / Реферат:
Датчик кутової швидкості, що містить гіровузол, датчики кута, моменту і підсилювач зворотного зв'язку, який відрізняється тим, що в нього додатково введені два підсилювачі, аналого-цифровий та цифро-аналоговий перетворювачі, пристрій вибору та збереження інформації, чотири ключі, реверсивний лічильник, блоки керування і синхронізації, і причому вихід датчика кута через перший підсилювач, аналого-цифровий перетворювач, пристрій вибору та...
Датчик кутової швидкості

Номер патенту: 2678
Опубліковано: 15.07.2004
Автори: Шкляр Володимир Петрович, Самусь Андрій Ігорович, Мурзаханов Олександр Валентинович, Шервашидзе Володимир Варламович
МПК: G01P 9/00
Мітки: датчик, швидкості, кутової
Формула / Реферат:
Датчик кутової швидкості, що містить чутливий елемент з гіромотором і системою підвісу, датчик кутового положення, наприклад, індуктивного типу, блок управління рухом чутливого елементу, схему вимірювання кутової швидкості, який відрізняється тим, що до його складу введені обмежувач та інвертуючий інтегратор, причому вхід та вихід інвертуючого інтегратора з'єднані через обмежувач з виходом та входом схеми вимірювання кутової швидкості...
Датчик кутової швидкості
Номер патенту: 2109
Опубліковано: 15.10.2003
Автори: Мурзаханов Олександр Валентинович, Шервашидзе Володимир Варламович, Леоненко Костянтин Миколайович
МПК: G01P 9/00, G01P 11/00
Мітки: швидкості, датчик, кутової
Формула / Реферат:
1. Датчик кутової швидкості, що містить розміщений за допомогою гнучкого підвісу чутливий елемент з гіромотором, датчик положення, коло зворотного зв'язку, схему визначення показника кутової швидкості, при цьому компенсаційна котушка силового перетворювача кола зворотного зв'язку встановлена на чутливому елементі між розміщеними від неї із зазором плоскими постійними магнітами із зустрічною орієнтацією магнітних полів, а коло зворотного...
Пристрій для вимірювання кутової швидкості та прискорення
Номер патенту: 56722
Опубліковано: 15.05.2003
Автори: Білинська Марина Йосипівна, Кухарчук Василь Васильович, Білинський Йосип Йосипович
МПК: G01C 19/00, G01P 3/36
Мітки: пристрій, вимірювання, прискорення, кутової, швидкості
Формула / Реферат:
Пристрій для вимірювання кутової швидкості та кутового прискорення, який містить освітлювач, контрольований вал, об'єктив, оптично зв'язаний з входом багатоелементного фотоприймального пристрою, який відрізняється тим, що в нього введена насадка на контрольованому валу, виконана у вигляді Архімедової спіралі, оптично зв'язана з освітлювачем, що являє собою напівпровідниковий лазер, об'єктивом і обчислювальним пристроєм, вхід якого зв'язаний з...
Пристрій для вимірювання кутової швидкості
Номер патенту: 55791
Опубліковано: 15.04.2003
Автори: Білинська Марина Йосипівна, Кухарчук Василь Васильович
МПК: G01P 3/36
Мітки: пристрій, вимірювання, кутової, швидкості
Формула / Реферат:
Пристрій для вимірювання кутової швидкості, що містить освітлювач, об'єктив, багатоелементний фотоприймальний пристрій, який відрізняється тим, що в нього введена багатогранна насадка на контрольований вал, виконана у вигляді правильного багатогранника, обчислювальний пристрій, при цьому освітлювач виконаний у вигляді імпульсного лазера, а багатоелементний фотоприймальний пристрій виконаний у вигляді матриці світлочутливих елементів, оптичний...
Попередній патент: Демпфіруючий натяжний пристрій
Наступний патент: Спосіб азотування в тліючому розряді з оптимізацією технологічного режиму
Випадковий патент: Емульсійна матриця для вибухових речовин