Спосіб вибору енергозберігаючого профілю верхньої будови дорожнього полотна – лдх
Номер патенту: 119867
Опубліковано: 10.10.2017
Автори: Легеза Віктор Петрович, Хомічак Любомир Михайлович, Дичка Іван Андрійович
Формула / Реферат
Спосіб вибору енергозберігаючого профілю верхньої будови дорожнього полотна - ЛДХ, у якому верхня будова являє собою залізобетонне збірне покриття із закріпленими на ньому рейками, яке розміщене на підготовленій основі та профільоване у вигляді плавної кривої, яка має опуклі ділянки з локальними максимумами у місцях зупинок транспортного засобу та вгнуті ділянки з локальними мінімумами між сусідніми зупинками, причому ця крива має опуклу форму у місцях плавного спряження різних ділянок між собою, яка відрізняється тим, що кожна вгнута ділянка між двома сусідніми зупинками виконана у вигляді циклоїди і визначається:
![]() , (1)
, (1)
де ![]() - параметр циклоїди, який змінюється в межах від 0 до
- параметр циклоїди, який змінюється в межах від 0 до ![]() ;
; ![]() ;
; ![]() - характеристика циклоїди, яка визначається за формулою:
- характеристика циклоїди, яка визначається за формулою:
![]() ,
,
де
![]() - половина дистанції між двома сусідніми зупинками;
- половина дистанції між двома сусідніми зупинками;
![]() ;
; ![]() - величина коефіцієнта сухого тертя ковзання між рейками та ведучими (тяговими) колесами транспортного засобу;
- величина коефіцієнта сухого тертя ковзання між рейками та ведучими (тяговими) колесами транспортного засобу; ![]() - загальна кількість колісних пар транспортного засобу;
- загальна кількість колісних пар транспортного засобу; ![]() - кількість ведучих колісних пар транспортного засобу.
- кількість ведучих колісних пар транспортного засобу.
Текст
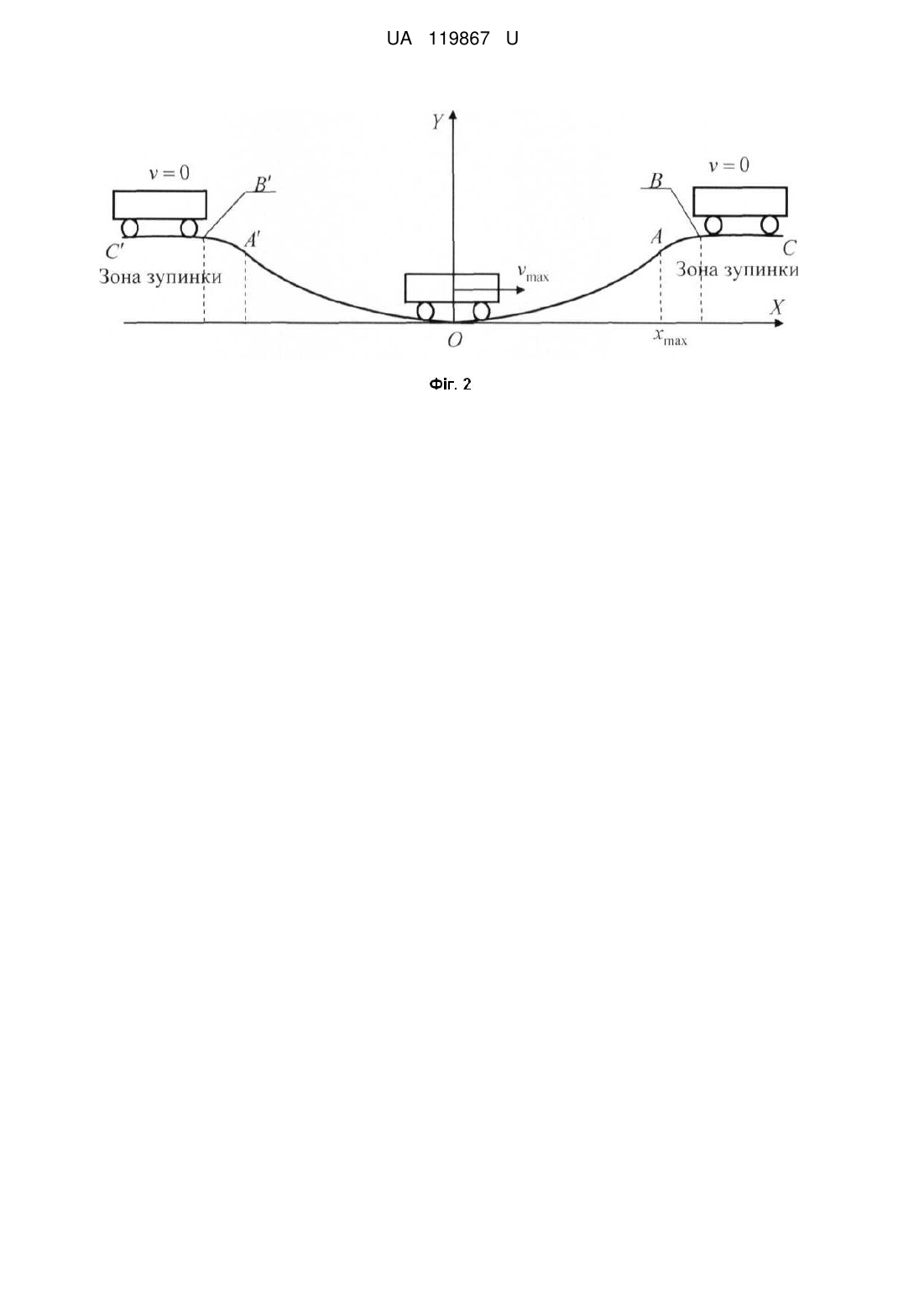
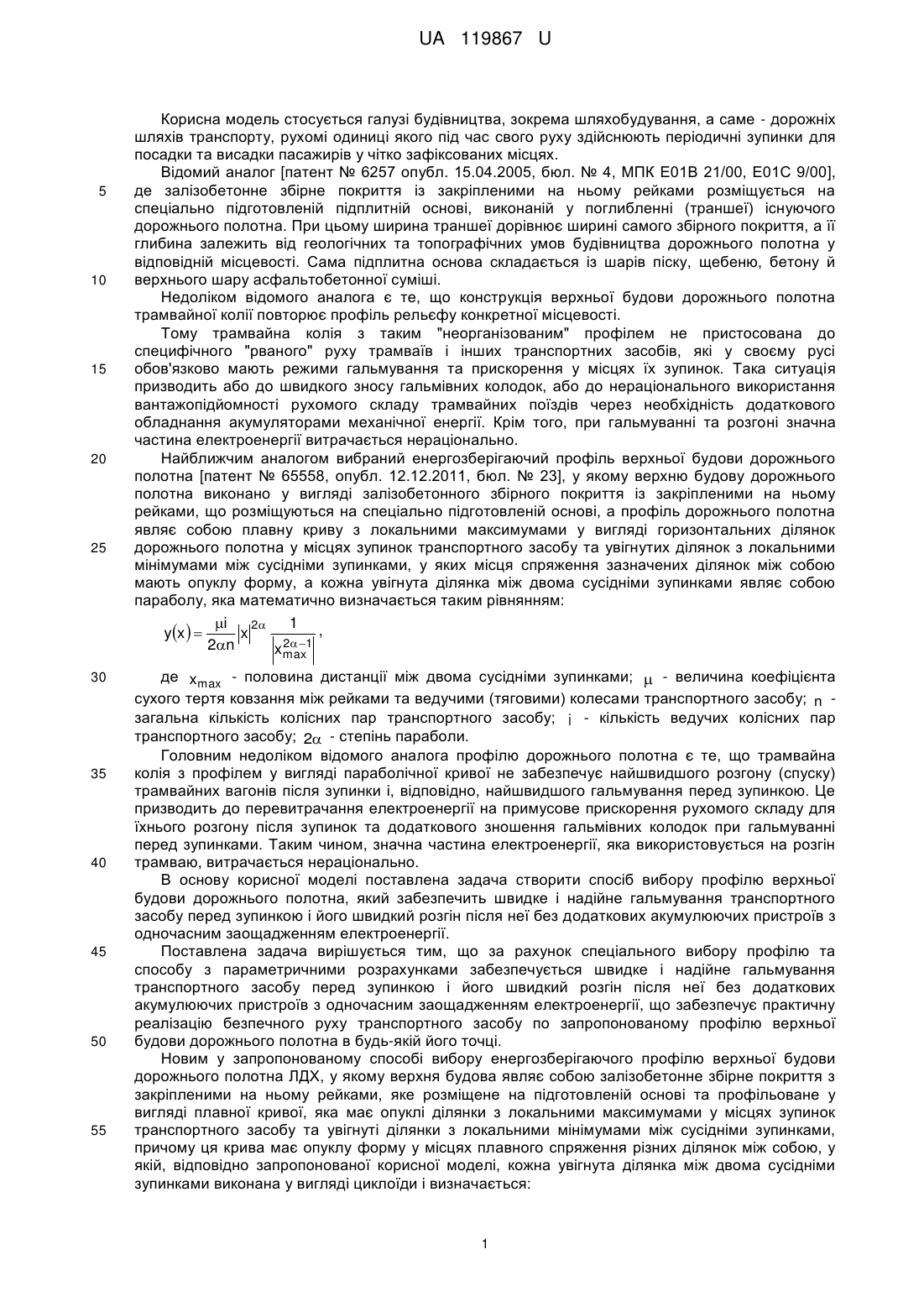
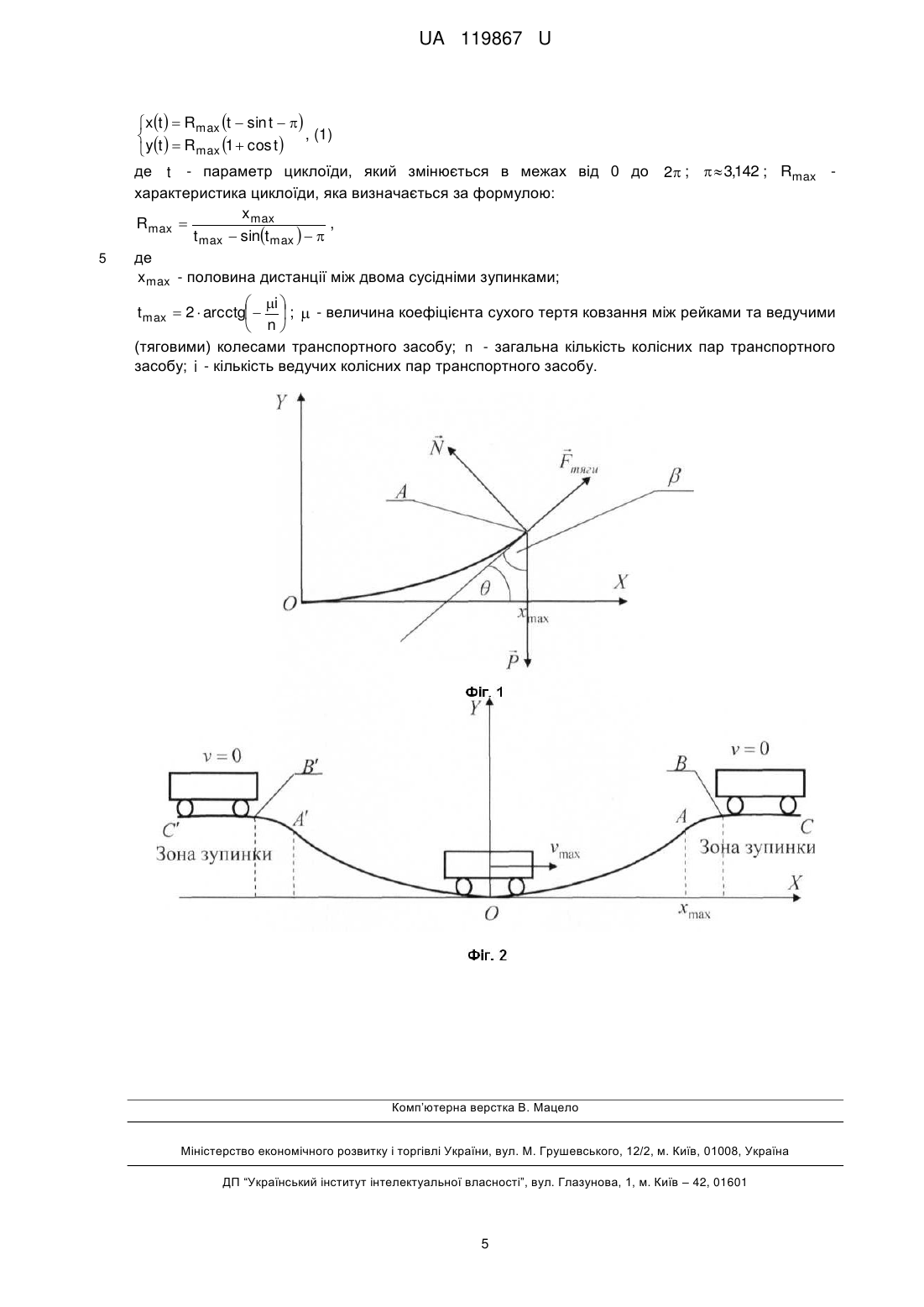
Реферат: Спосіб вибору енергозберігаючого профілю верхньої будови дорожнього полотна - ЛДХ, у якому верхня будова являє собою залізобетонне збірне покриття із закріпленими на ньому рейками, яке розміщене на підготовленій основі та профільоване у вигляді плавної кривої, яка має опуклі ділянки з локальними максимумами у місцях зупинок транспортного засобу та вгнуті ділянки з локальними мінімумами між сусідніми зупинками, причому ця крива має опуклу форму у місцях плавного спряження різних ділянок між собою. Кожна вгнута ділянка між двома сусідніми зупинками виконана у вигляді циклоїди і визначається: xt Rmax t sin t , (1) yt Rmax 1 cos t де t - параметр циклоїди, який змінюється в межах від 0 до 2 ; 3,142 ; Rmax характеристика циклоїди, яка визначається за формулою: x max Rmax , t max sint max де xmax - половина дистанції між двома сусідніми зупинками; i t max 2 arcctg ; - величина коефіцієнта сухого тертя ковзання між рейками та n ведучими (тяговими) колесами транспортного засобу; n - загальна кількість колісних пар транспортного засобу; i - кількість ведучих колісних пар транспортного засобу. UA 119867 U (12) UA 119867 U UA 119867 U 5 10 15 20 25 Корисна модель стосується галузі будівництва, зокрема шляхобудування, а саме - дорожніх шляхів транспорту, рухомі одиниці якого під час свого руху здійснюють періодичні зупинки для посадки та висадки пасажирів у чітко зафіксованих місцях. Відомий аналог [патент № 6257 опубл. 15.04.2005, бюл. № 4, МПК Е01В 21/00, Е01С 9/00], де залізобетонне збірне покриття із закріпленими на ньому рейками розміщується на спеціально підготовленій підплитній основі, виконаній у поглибленні (траншеї) існуючого дорожнього полотна. При цьому ширина траншеї дорівнює ширині самого збірного покриття, а її глибина залежить від геологічних та топографічних умов будівництва дорожнього полотна у відповідній місцевості. Сама підплитна основа складається із шарів піску, щебеню, бетону й верхнього шару асфальтобетонної суміші. Недоліком відомого аналога є те, що конструкція верхньої будови дорожнього полотна трамвайної колії повторює профіль рельєфу конкретної місцевості. Тому трамвайна колія з таким "неорганізованим" профілем не пристосована до специфічного "рваного" руху трамваїв і інших транспортних засобів, які у своєму русі обов'язково мають режими гальмування та прискорення у місцях їх зупинок. Така ситуація призводить або до швидкого зносу гальмівних колодок, або до нераціонального використання вантажопідйомності рухомого складу трамвайних поїздів через необхідність додаткового обладнання акумуляторами механічної енергії. Крім того, при гальмуванні та розгоні значна частина електроенергії витрачається нераціонально. Найближчим аналогом вибраний енергозберігаючий профіль верхньої будови дорожнього полотна [патент № 65558, опубл. 12.12.2011, бюл. № 23], у якому верхню будову дорожнього полотна виконано у вигляді залізобетонного збірного покриття із закріпленими на ньому рейками, що розміщуються на спеціально підготовленій основі, а профіль дорожнього полотна являє собою плавну криву з локальними максимумами у вигляді горизонтальних ділянок дорожнього полотна у місцях зупинок транспортного засобу та увігнутих ділянок з локальними мінімумами між сусідніми зупинками, у яких місця спряження зазначених ділянок між собою мають опуклу форму, а кожна увігнута ділянка між двома сусідніми зупинками являє собою параболу, яка математично визначається таким рівнянням: i 1 , 2 yx x 2 1 2n x max 30 35 40 45 50 55 де xmax - половина дистанції між двома сусідніми зупинками; - величина коефіцієнта сухого тертя ковзання між рейками та ведучими (тяговими) колесами транспортного засобу; n загальна кількість колісних пар транспортного засобу; i - кількість ведучих колісних пар транспортного засобу; 2 - степінь параболи. Головним недоліком відомого аналога профілю дорожнього полотна є те, що трамвайна колія з профілем у вигляді параболічної кривої не забезпечує найшвидшого розгону (спуску) трамвайних вагонів після зупинки і, відповідно, найшвидшого гальмування перед зупинкою. Це призводить до перевитрачання електроенергії на примусове прискорення рухомого складу для їхнього розгону після зупинок та додаткового зношення гальмівних колодок при гальмуванні перед зупинками. Таким чином, значна частина електроенергії, яка використовується на розгін трамваю, витрачається нераціонально. В основу корисної моделі поставлена задача створити спосіб вибору профілю верхньої будови дорожнього полотна, який забезпечить швидке і надійне гальмування транспортного засобу перед зупинкою і його швидкий розгін після неї без додаткових акумулюючих пристроїв з одночасним заощадженням електроенергії. Поставлена задача вирішується тим, що за рахунок спеціального вибору профілю та способу з параметричними розрахунками забезпечується швидке і надійне гальмування транспортного засобу перед зупинкою і його швидкий розгін після неї без додаткових акумулюючих пристроїв з одночасним заощадженням електроенергії, що забезпечує практичну реалізацію безпечного руху транспортного засобу по запропонованому профілю верхньої будови дорожнього полотна в будь-якій його точці. Новим у запропонованому способі вибору енергозберігаючого профілю верхньої будови дорожнього полотна ЛДХ, у якому верхня будова являє собою залізобетонне збірне покриття з закріпленими на ньому рейками, яке розміщене на підготовленій основі та профільоване у вигляді плавної кривої, яка має опуклі ділянки з локальними максимумами у місцях зупинок транспортного засобу та увігнуті ділянки з локальними мінімумами між сусідніми зупинками, причому ця крива має опуклу форму у місцях плавного спряження різних ділянок між собою, у якій, відповідно запропонованої корисної моделі, кожна увігнута ділянка між двома сусідніми зупинками виконана у вигляді циклоїди і визначається: 1 UA 119867 U xt Rmax t sin t , yt Rmax 1 cos t 5 10 15 20 25 30 (1) де t - параметр циклоїди, який змінюється в межах від 0 до 2 ; 3,142 ; Rmax характеристика циклоїди, яка визначається за формулою: xmax , Rmax t max sint max де i xmax - половина дистанції між двома сусідніми зупинками; t max 2 arcctg ; n величина коефіцієнта сухого тертя ковзання між рейками та ведучими (тяговими) колесами транспортного засобу; n - загальна кількість колісних пар транспортного засобу; i - кількість ведучих колісних пар транспортного засобу. Суть запропонованої корисної моделі полягає в наступному. Замінюючи профіль у вигляді параболи на циклоїдальний у відповідності до рівнянь (1), то можна суттєво зменшити час переміщення транспортних засобів між зупинками та зменшити витрачання електроенергії і пального на їхній розгін після кожної із зупинок. Обґрунтування такого вибору профілю верхньої будови дорожнього полотна з виведенням формул (1) наступне: Введемо таку прямокутну Декартову систему координат, у якій початок координат О співпадає з найнижчою точкою кривої між зупинками, вісь ординат OY напрямлена вертикально вверх, вісь абсцис ОХ - горизонтально вправо. Зазначимо, що вісь OY є одночасно віссю симетрії цієї парної кривої. Нагадаємо, що xmax дорівнює половині "активної" дистанції між двома сусідніми зупинками. Вона вибирається в залежності від типу міського транспорту та відстані між сусідніми зупинками. Визначимо формулу для обчислення характеристики циклоїди R, яка залежатиме від заданої величини xmax . Виберемо найменш вигідне положення транспортного засобу у верхній точці кривої перед зупинкою x xmax , коли його швидкість зменшується до нуля (див. Фіг. 1, точка А), а кутовий коефіцієнт k дотичної до кривої найбільший. Визначимо величину характеристики R циклоїди з тої умови, щоб транспортний засіб зміг зрушити з місця вгору з цього найбільш не вигідного положення в точці А, якщо величина коефіцієнта сухого тертя ковзання між рейками та ведучими (тяговими) колесами транспортного засобу задана і дорівнює . Нехай кутовий коефіцієнт дотичної до циклоїди в цій точці А дорівнює k . Тоді похідна y 'x t параметрично заданої функції (1) в точці кривої з параметром t t max задовольнятиме наступне рівняння: k y 'x t max 35 40 y 't t x 't t t t max R sin t R1 cos t t t max t ctg max 2 . Співвідношення між відповідними проекціями сил, показаних на Фіг. 1. На цьому рисунку позначено: N - нормальна реакція дорожнього полотна, яка виникає під дією сили ваги P Ni всього транспортного засобу; P Mg - вага транспортного засобу; Fтяги - модуль сили n тяги Fтяги (тертя ковзання), яка виникає під дією ведучих коліс транспортного засобу і напрямлена вздовж дотичної до кривої. В цих формулах враховано кількість i ведучих колісних пар транспортного засобу, а також загальну кількість колісних пар транспортного засобу n . Всі зазначені сили проектуються на напрями дотичної та нормалі, які побудовані в точці Ax xmax до кривої. Сума проекцій всіх діючих сил на напрям дотичної має вигляд: Mg cos Fтяги 0 . 2 UA 119867 U Сума проекцій всіх діючих сил на напрям нормалі має вигляд: N Mg cos 0 , де - кут між дотичною і додатним напрямом осі ОХ; - кут між дотичною і від'ємним напрямом осі ΟΥ; 5 очевидно, що . 2 Із наведених вище співвідношень дістанемо формулу для кутового коефіцієнта дотичної, який пов'язує між собою параметр t max циклоїди і характеристики n , i , транспортної системи: t i k tg ctg max . 2 n 10 (2) Звідси знайдемо формулу для визначення величини t max , при якій абсциса xt досягає свого критичного значення xmax , тобто xt max xmax : i t max 2 arcctg . n (3) Отже, формула, яка пов'язує задану величину xmax і характеристику R циклоїди, набуває такого вигляду: 15 20 xmax xtmax Rtmax sintmax , де параметр t max знаходять за формулою (3). Зазначимо, що параметр t вимірюється в радіанах. У формулі (4) величина характеристики R циклоїди нам не відома, проте величина критичного значення xmax є заданою. З рівнянь (3) і (4) визначаємо характеристику R циклоїди, яка буде залежати від знайденого значення параметра t max і заданої величини критичного значення xmax між двома сусідніми зупинками: Rmax 25 30 35 (4) t max xmax sint max (5) У результаті - отримані остаточні співвідношення для визначення форми кривої - циклоїди у вигляді двох наступних параметричних рівнянь: xt Rmax t sin t ; , yt Rmax 1 cos t де Rmax визначається формулою (5). Оскільки у вибраній критичній точці А кривої кутовий коефіцієнт є найбільшим, то і у всіх інших точках увігнутої кривої (Фіг. 1) при 0 x xmax кутові коефіцієнти є меншими порівняно із вибраною точкою А при x xmax . Тому практична і фізична реалізація безпечного руху транспортного засобу без проковзування по такому профілю верхньої будови дорожнього полотна буде надійно забезпечена. Таким чином доведено, по-перше, співвідношення (1), винесені у формулу корисної моделі. Наведемо приклад розрахунку характеристики Rmax за допомогою виведених параметричних рівнянь циклоїди (1) при таких вихідних даних: xmax 400 м ; max 13 м / с максимальна швидкість транспортного засобу в нижній точці О кривої; 0,16 - коефіцієнт 40 тертя ковзання сталевого колеса відносно сталевої рейки; i 2 ; n 8 . Обчислимо величину характеристики Rmax . Спочатку визначимо максимальну висоту підйому транспортного засобу (висоту зупинки y зу п ) при такій заданій максимальній швидкості (в розрахунках прийнято, що g 10 м / с 2 ): 3 UA 119867 U 2 Mmax 2 Mgh hmax y зу п max 8,45 м . 2 2g За формулою (2) визначимо кутовий коефіцієнт k у найнебезпечнішій точці кривої (це є точка А). Він дорівнює: k 0,04 . За цією величиною та формулою (3) обчислимо t max : 5 tmax 2 arcctg 0,04 3,2217 . Тепер за заданою величиною xmax і знайденою величиною t max обчислимо характеристику циклоїди Rmax : xmax 400 2500 м . t max sint max 3,2217 sin3,2217 Таким чином, шукана величина характеристики циклоїди дорівнює: Rmax 2500 м . Очевидно, що при іншому заданому значенні xmax параметр t max і величина характеристики Rmax будуть іншими. Суть корисної моделі можна з'ясувати з Фіг. 2, де наведено якісну форму кривої запропонованого енергозберігаючого профілю верхньої будови дорожнього полотна. Кожна увігнута ділянка А'А між зупинками має свій локальний мінімум в деякій точці О та з обох кінців має плавні спряження В'А' та АВ у вигляді опуклих кривих, які з'єднують цю увігнуту ділянку із сусідніми горизонтальними ділянками С'В' і ВС кривої відповідно. Завдяки вибору такого профілю верхньої будови дорожнього полотна під час руху Rmax 10 15 20 25 30 35 40 2 транспортного засобу відбувається процес перетворення його кінетичної енергії M max - в 2 потенціальну Mgh, причому це буде спостерігатися періодично, від зупинки до зупинки. В такому динамічному режимі руху практично виключаються додаткові енергетичні витрати на активне гальмування та активний розгін транспортного засобу. Додаткова енергія може знадобитись тільки на подолання сил тертя кочення між колесами транспортного засобу та рейками, які є незначними, і енерговитратами на це можна знехтувати. Проте відмінність такого періодичного руху транспортного засобу від найближчого аналога полягає в тому, що швидкість розгону (руху) транспортного засобу після зупинки збільшиться за рахунок вибору нового профілю запропонованої кривої у вигляді циклоїди порівняно з профілем у вигляді параболи. Аналогічна картина буде спостерігатись і у гальмівному шляху транспортного засобу перед зупинкою. Енергозберігаючий профіль у вигляді циклоїди для верхньої будови дорожнього полотна може бути реалізований за допомогою спеціального профілювання підплитної основи для рейкового транспорту (трамвай, залізниця, метрополітен), наприклад, підсипкою і "підштопкою" різної кількості ущільнених шарів ґрунту та щебеню або з використанням паль різної висоти вздовж дорожнього полотна. Для монорельсового транспорту це профілювання взагалі спрощується, оскільки його несучі рейки закріплюються на вертикальних стійках над землею, висоту яких можна вибирати у відповідності до формул (1). Запропонований спосіб вибору профілю дорожнього полотна ЛДХ: за рахунок спеціального способу вибору енергозберігаючого профілю верхньої будови дорожнього полотна у вигляді циклоїди забезпечиться надійне гальмування транспортного засобу перед зупинкою та його розгін після неї без додаткових акумулюючих пристроїв з одночасним заощадженням електроенергії. Запропонована корисна модель забезпечує практичну реалізацію безпечного руху транспортного засобу по запропонованому профілю верхньої будови дорожнього полотна у будь-якій його точці. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Спосіб вибору енергозберігаючого профілю верхньої будови дорожнього полотна - ЛДХ, у якому верхня будова являє собою залізобетонне збірне покриття із закріпленими на ньому рейками, яке розміщене на підготовленій основі та профільоване у вигляді плавної кривої, яка має опуклі ділянки з локальними максимумами у місцях зупинок транспортного засобу та вгнуті ділянки з локальними мінімумами між сусідніми зупинками, причому ця крива має опуклу форму у місцях плавного спряження різних ділянок між собою, який відрізняється тим, що кожна вгнута ділянка між двома сусідніми зупинками виконана у вигляді циклоїди і визначається: 4 UA 119867 U 5 xt Rmax t sin t , (1) yt Rmax 1 cos t де t - параметр циклоїди, який змінюється в межах від 0 до 2 ; 3,142 ; Rmax характеристика циклоїди, яка визначається за формулою: x max , Rmax t max sint max де xmax - половина дистанції між двома сусідніми зупинками; i t max 2 arcctg ; - величина коефіцієнта сухого тертя ковзання між рейками та ведучими n (тяговими) колесами транспортного засобу; n - загальна кількість колісних пар транспортного засобу; i - кількість ведучих колісних пар транспортного засобу. Комп’ютерна верстка В. Мацело Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: E01C 9/02, E01C 9/00, E01B 21/00
Мітки: верхньої, лдх, профілю, будови, енергозберігаючого, полотна, вибору, дорожнього, спосіб
Код посилання
<a href="https://ua.patents.su/7-119867-sposib-viboru-energozberigayuchogo-profilyu-verkhno-budovi-dorozhnogo-polotna-ldkh.html" target="_blank" rel="follow" title="База патентів України">Спосіб вибору енергозберігаючого профілю верхньої будови дорожнього полотна – лдх</a>
Енергозберігаючий профіль верхньої будови дорожнього полотна

Номер патенту: 65558
Опубліковано: 12.12.2011
Автори: Легеза Дмитро Вікторович, Легеза Віктор Петрович
МПК: E01B 21/00, E01C 9/00
Мітки: верхньої, будови, енергозберігаючий, профіль, полотна, дорожнього
Формула / Реферат:
Енергозберігаючий профіль верхньої будови дорожнього полотна, у якому верхня будова виконана у вигляді залізобетонного збірного покриття із закріпленими на ньому рейками, що розміщується на спеціально підготовленій основі, який відрізняється тим, що його виконано у вигляді плавної кривої з локальними максимумами у вигляді горизонтальних ділянок дорожнього полотна у місцях зупинок транспортного засобу та вгнутих ділянок з локальними мінімумами...
Стенд для випробування транспортних засобів з відтворенням профілю дорожнього полотна
Номер патенту: 59365
Опубліковано: 10.05.2011
Автори: Мачишин Григорій Миколайович, Березенець Ігор Олександрович, Пелевін Леонід Євгенійович
МПК: G01M 17/00
Мітки: профілю, випробування, відтворенням, дорожнього, засобів, стенд, транспортних, полотна
Формула / Реферат:
Стенд для випробування транспортних засобів з відтворенням профілю дорожнього полотна, що містить основу, на яку встановлено опорні барабани і нерухомі опори, який відрізняється тим, що на фундамент встановлено ліву та праву станини стенда, кожна з яких спирається на основи, на які встановлено передні та задні стійки, між якими симетрично відносно центральної вертикальної осі розміщені зовнішня та внутрішня стінки з напрямними, між якими...
Спосіб захисту дорожнього полотна, злітно-посадочних аеродромних смуг від руйнівних вібраційно-хвильових коливань
Номер патенту: 116696
Опубліковано: 25.05.2017
Автори: Харченко Микола Микитович, Кафтан Олександр Несторович
МПК: E01C 5/00, E02D 27/34, E01C 3/00
Мітки: полотна, вібраційно-хвильових, спосіб, руйнівних, аеродромних, коливань, захисту, смуг, злітно-посадочних, дорожнього
Формула / Реферат:
Спосіб захисту дорожнього полотна, злітно-посадочних аеродромних смуг від руйнівних вібраційно-хвильових коливань, що включає горизонтальне укладання автомобільних шин з пустотами, заповненими щебенем, який відрізняється тим, що автомобільні шини горизонтально укладають в габіонний матрац, пустоти заповнюють щебенем, поверх габіонного матраца укладають георешітку, чарунки якої заповнюють щебенем.
Тент для захисту дорожнього полотна, робітників та техніки від несприятливих кліматичних умов
Номер патенту: 48274
Опубліковано: 10.03.2010
Автори: Комащенко Максим Павлович, Макачян Карен Геворкович, Доля Анатолій Григорович, Бачурін Олексій Микитович
МПК: E01C 23/00, E04B 1/00
Мітки: техніки, умов, кліматичних, робітників, полотна, захисту, тент, несприятливих, дорожнього
Формула / Реферат:
1. Тент для захисту дорожнього полотна, робітників та техніки від несприятливих кліматичних умов, що включає ферми, з'єднані між собою за допомогою плівки, який відрізняється тим, що як плівку використовують плівку, виготовлену з поліетилентерафталату.2. Тент за п. 1, який відрізняється тим, що для забезпечення мобільності він споряджений колесами, встановленими на рейки, попередньо влаштовані на земляне полотно.3. Тент за пп....
Залізобетонна рейкова плита для улаштування верхньої будови безстикової трамвайної колії
Номер патенту: 10417
Опубліковано: 15.11.2005
Автор: Кердівара Анатолій Дмитрович
МПК: E01B 21/00, E01C 9/00
Мітки: безстикової, колії, трамвайної, будови, верхньої, улаштування, залізобетонна, рейкова, плита
Формула / Реферат:
Залізобетонна рейкова плита для улаштування верхньої будови безстикової трамвайної колії, що містить елементи фіксації положення плит відносно рейок, яка відрізняється тим, що по всій довжині плити виконані два пази для утворення рейкової колії, у яких жорстко закріплені омегаподібні металеві профілі, що утворюють жолоби, які мають протилежні стінки, що звужуються до зіва жолоба й нахилені одна до одної під кутом 10-20° від вертикалі, при...
Попередній патент: Замок-блокіратор з матричною системою кодування
Наступний патент: Конструкція тришарових профільних брусів для виготовлення віконних блоків із склопакетами
Випадковий патент: Системний блок комп'ютера