Спосіб компенсації активної складової комбінованої завади
Номер патенту: 121464
Опубліковано: 11.12.2017


Формула / Реферат
Спосіб компенсації активної складової комбінованої завади когерентно-імпульсних радіолокаційних станцій з пачковою вобуляцією частоти повторення зондуючих імпульсів, який базується на адаптації вагових коефіцієнтів, незмінних для всіх дискретів дальності кожної частотної пачки, за яким після часової фільтрації проводять просторову (або поляризаційну) фільтрацію, який відрізняється тим, що у фазових фільтрах, які найбільш віддалені від фільтрів, що можуть містити пасивні завади, на інтервалах дальності, довжина яких еквівалентна часу адаптації вагових коефіцієнтів, шляхом вирахування модулів нормованих коефіцієнтів міжканальної кореляції та їх порівняння визначають інтервал з найменшим рівнем пасивної завади в кожних однойменних фазових фільтрах основного та компенсаційного каналу, після вирахуваних модулів нормованих коефіцієнтів кореляції на визначених інтервалах дальності вибирають однойменні фазові фільтри основного та компенсаційного каналів з найменшим рівнем пасивної завади для формування вагових коефіцієнтів, при цьому сформовані вагові коефіцієнти використовують для компенсації активної складової комбінованої завади в кожному фазовому фільтрі кожного дискрету дальності.
Текст
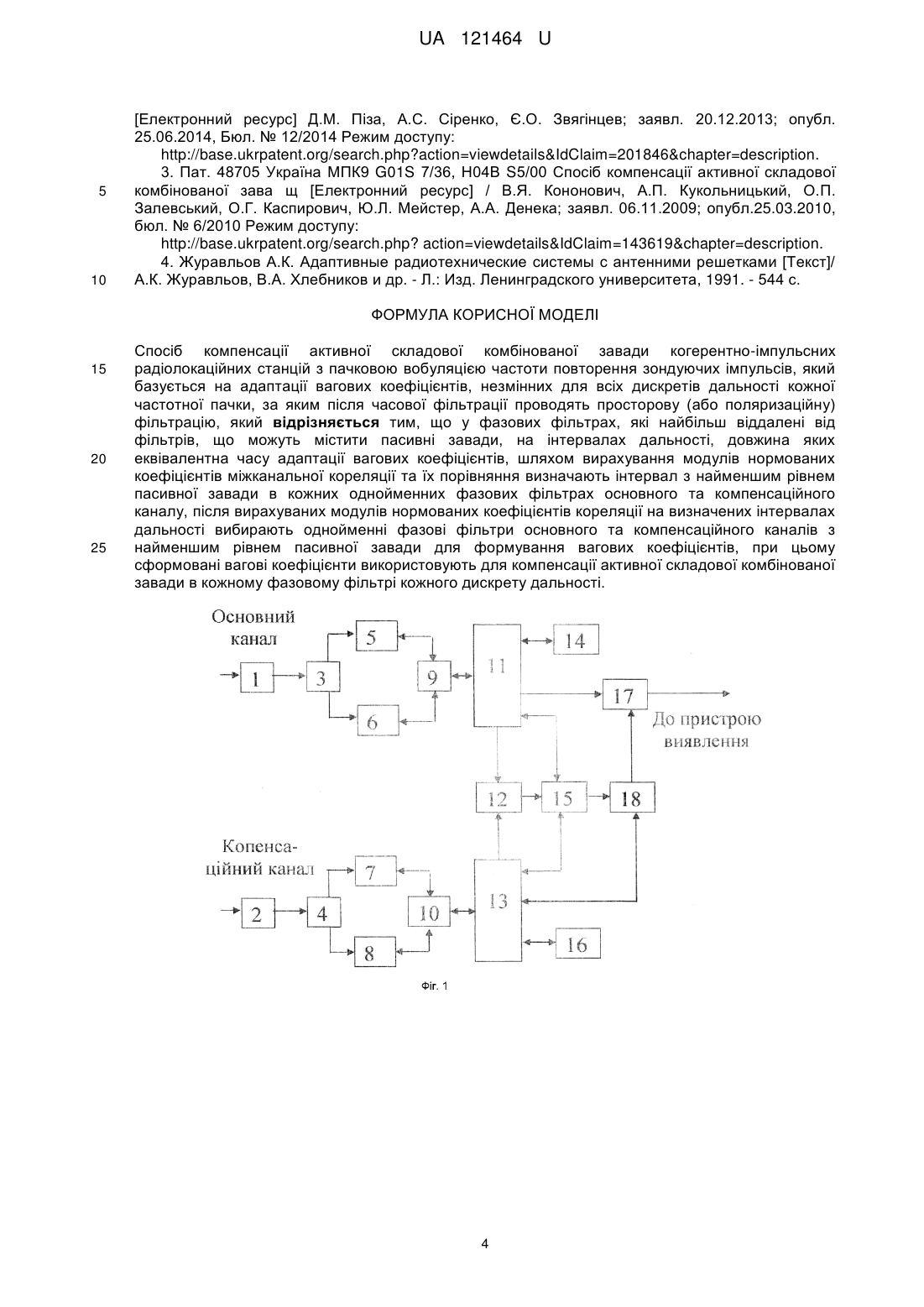
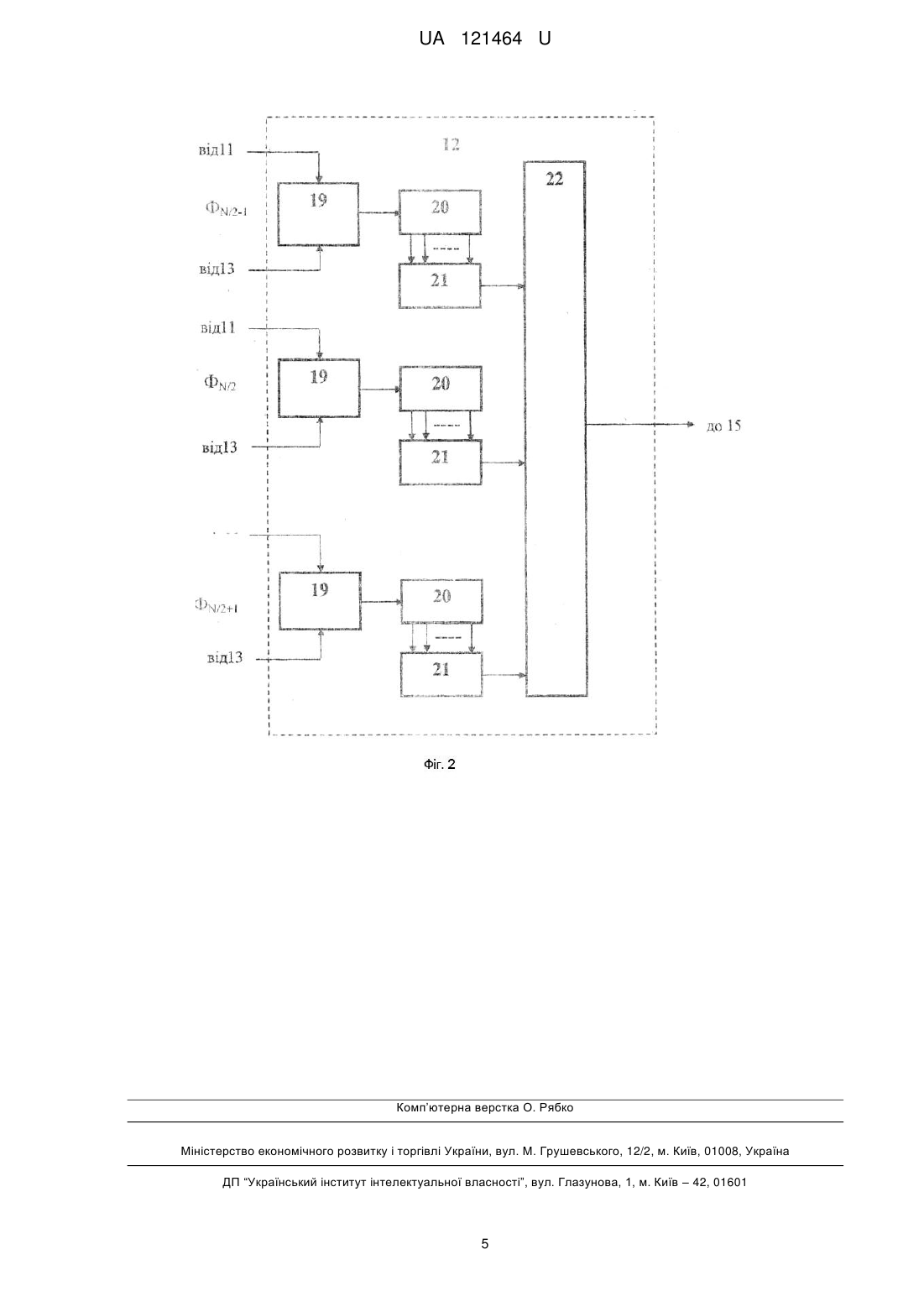
Реферат: Спосіб компенсації активної складової комбінованої завади когерентно-імпульсних радіолокаційних станцій з пачковою вобуляцією частоти повторення зондуючих імпульсів, який базується на адаптації вагових коефіцієнтів, незмінних для всіх дискретів дальності кожної частотної пачки. Після часової фільтрації проводять просторову (або поляризаційну) фільтрацію. У фазових фільтрах, які найбільш віддалені від фільтрів, що можуть містити пасивні завади, на інтервалах дальності, довжина яких еквівалентна часу адаптації вагових коефіцієнтів, вираховують модулі нормованих коефіцієнтів міжканальної кореляції та їх порівняння. Визначають інтервал з найменшим рівнем пасивної завади в кожних однойменних фазових фільтрах основного та компенсаційного каналу. Після вирахуваних модулів нормованих коефіцієнтів кореляції на визначених інтервалах дальності, вибирають однойменні фазові фільтри основного та компенсаційного каналів з найменшим рівнем пасивної завади для формування вагових коефіцієнтів. Сформовані вагові коефіцієнти використовують для компенсації активної складової комбінованої завади в кожному фазовому фільтрі кожного дискрету дальності. UA 121464 U (54) СПОСІБ КОМПЕНСАЦІЇ АКТИВНОЇ СКЛАДОВОЇ КОМБІНОВАНОЇ ЗАВАДИ UA 121464 U UA 121464 U 5 10 15 20 25 30 35 40 Корисна модель належить до радіолокації та може бути використана для підвищення завадозахищеності імпульсних радіолокаційних станцій (РЛС), що використовують пачкову вобуляцію частоти повторення зондуючих імпульсів в умовах дії комбінованих завад по головному та бічних пелюстках діаграми спрямованості антени (ДСА). Відомими аналогами є радіолокатори, в яких застосовано спосіб фільтрації комбінованих завад, сутність якого полягає в тому, що на першому ступені фільтрації проводиться просторова або поляризаційна фільтрацій, а на другому ступені - часова фільтрація. Просторова фільтрація забезпечує приглушення активних завад, які діють по бічних пелюстках ДСА [1]. При цьому використовують просторові відмінності в структурі корисних сигналів і завад. Поляризаційна фільтрація забезпечує придушення активних завад, я всі не співпадають по поляризації з корисним сигналом і може застосовуватись для придушення активних завад, які діють по головному променю ДСА [2]. Часова фільтрація дозволяє виділяти корисні сигнали, використовуючи ефект Доплера, тобто виділяти корисні сигнали на фоні пасивної складової комбінованої завади за спектральними ознаками. Як пристрої просторової або поляризаційної фільтрації використовують додаткові компенсаційні канали прийому та автокомпенсатори завад або адаптивні антенні решітки, в якості часових фільтрів можуть використовуватись багатоканальні фазові фільтри. При застосуванні на першому ступені фільтрації просторового чи поляризаційного фільтра, а на другому ступені часового фільтра, можливе суттєве придушення активної складової комбінованої завади. Але суттєвим недоліком такого способу фільтрації в когерентно-імпульсній РЛС є зниження ефективності виділення корисних сигналів на фоні пасивної складової комбінованої завади на другому ступені фільтрації в часовому фільтрі. Це обумовлено тим, що при адаптації вагових коефіцієнтів автокомпенсатора на першому ступені фільтрації відбувається модуляція пасивної складової завади, яка надходить до компенсаційного каналу прийому. Така модуляція призводить до спотворення спектрів сигналів на виході автокомпенсатора і, як наслідок, до зниження ефективності виділення корисних сигналів на фоні пасивної складової комбінованої завади. Найближчим аналогом до корисної моделі є спосіб компенсації комбінованих завад, при якому на першому етапі фільтрації проводиться часова, а на другому етапі просторова або поляризаційна фільтрація [3]. При цьому формування вагових коефіцієнтів автокомпенсатора відбувається у межах поточної частотної пачки по інформації фазових фільтрів основного та компенсаційного каналів, які найбільш віддалені від фазових фільтрів з мінімальними та максимальними фазовими зсувами, а компенсація активної складової комбінованої завади в межах частотної пачки, виконується з використанням адаптивних вагових коефіцієнтів, що були сформовані в тій же самій частотній пачці. Недоліком найближчого аналога є низька ефективність придушення активної шумової завади за рахунок її міжканальної декореляції пасивною завадою [4], що обумовлено відносно високою вірогідністю присутності пасивної завади в фазових фільтрах з номером N/2 (де N кількість фазових фільтрів), в яких накопичуються сигнали з міжперіодною різницею 180 градусів. Дійсно, враховуючи функціональний зв'язок між частотою Доплера FД та радіальною складовою швидкості V г пасивної завади FД 45 50 55 2Vr , при λ=10 см і, наприклад V =20 м/с, г частота FД дорівнює 400 Гц, що може бути рівною або і перевищувати половину частоти повторення імпульсів радіолокаційної станції. При цьому пасивна завада може концентруватися в фільтрі з номером N/2. Це підтверджується результатами реєстрації пасивних завад в реальних, умовах функціонування РЛС. Крім цього, обмежуючим фактором придушення активної шумової завади є міжфільтрове "просочування" пасивної завади через бокові пелюстки суміжних фільтрів. Так, наприклад, при узгодженій фільтрації рівень бокової пелюстки фільтра складає мінус 13 дБ. В основу корисної моделі поставлена задача підвищення ефективності компенсації комбінованих завад за рахунок використання як спектральних, так і-часових відмінностей в структурі активних та пасивних завад. Поставлена задача вирішується тим, що спосіб компенсації активної складової комбінованої завади когерентно-імпульсних РЛС з пачковою вобуляцією зондуючих імпульсів після часової фільтрації проводиться просторова (поляризаційна) фільтрація, при виконанні якої формування вагових коефіцієнтів авто компенсатора виконується у межах поточної пачки по інформації фазових фільтрів, згідно з корисною моделлю, додатково на інтервалах дальності, еквівалентних часу адаптації вагових коефіцієнтів, у фазових фільтрах, які найбільш віддалені 1 UA 121464 U 5 10 15 20 25 30 35 40 від фільтрів, що можуть містити пасивні завади, виконується вибір інтервалу дальності з найменшим рівнем пасивної завади з наступним вибором однойменних фазових фільтрів основного та компенсаційного каналів для формування вагових коефіцієнтів, в яких на вибраному інтервалі дальності пасивна завада або відсутня, або має найменший рівень. Процедура адаптації вагових коефіцієнтів автокомпенсатора виконують з використанням інформації на інтервалі дальності з мінімальним рівнем пасивної завади та з використанням однойменних фазових фільтрів основного та компенсаційного каналів, у яких пасивна завада або відсутня, або має найменший рівень на вибраному інтервалі дальності в межах поточної частотної пачки. Враховуючи явище декореляції активної складової комбінованої завади пасивною завадою [4], інтервал дальності з найменшим рівнем пасивної завади може бути визначеним шляхом поточного оцінювання нормованого міжканального коефіцієнта кореляції. Кореляційний аналіз, який виконується в кожному фільтровому каналі, за рахунок вибору інтервалу дальності з найбільшим значенням нормованого коефіцієнта міжканальної кореляції в однойменних фазових фільтрах, в яких ймовірність наявності пасивної завади найменша, надає можливість використати як спектральні, так і часові відмінності в структурі пасивної складової комбінованої завади для зменшення її впливу на адаптацію вагових коефіцієнтів авто компенсатора. Корисна модель пояснюється прикладом системи часово-поляризаційної (або часовопросторової) обробки РЛС, що використовує пачкову вобуляцію частоти повторення зондуючих імпульсів. Структурна схема системи часово-поляризаційної обробки, в якій реалізовано запропонований спосіб, зображена на фіг. 1 До складу системи часово-поляризаційної обробки входять: основний 1 та компенсаційний 2 канали прийому, комутатори 3, 4, 9, 10, запам'ятовуючі пристрої (ЗП) 5, 6, 7, 8, контролери доступу до пам'яті (КДП) 11, 13, процесори дискретного перетворення Фур'є (ДПФ) 14, 16, кореляційний аналізатор 12, формувач вагових коефіцієнтів 15, суматор автокомпенсатора 17, помножувач 18. Кореляційний аналізатор 12 (фіг. 2), в свою чергу, складається з кореляторів 19, цифрових ліній затримки (ЦЛЗ) 20, пристроїв вибору максимуму за дальністю 21 та пристрою вибору максимуму за фільтром 22. Виходи основного 1 та компенсаційного 2 каналів прийому підключені до комутаторів 3 та 4, відповідно. Комутатор 3 підключений до ЗП 5 та 6. Комутатор 4 підключений до ЗП 7 та 8. ЗП 5 та 6 через комутатор 9 підключені до КДП 11. ЗП 7 та 8 через комутатор 10 підключені до КДП. 13. КДП її підключений до процесора ДПФ 14, кореляційного аналізатора 12, формувача вагових коефіцієнтів 15 та першого входу суматора автокомпенсатора 17. Вихід кореляційного аналізатора 12 підключений до входу формувача вагових коефіцієнтів 15, вихід якого підключено до першого входу помножувача 18. КДП 13 підключений до процесора ДПФ 16, до кореляційного аналізатора 12, формувача вагових коефіцієнтів 15 та другого входу помножувача 18. Вихід помножувача 18 підключений до другого входу суматора авто компенсатора 17. Вихід суматора автокомпенсатора 17 є виходом системи часово-просторової обробки та підключається до пристрою виявлення РЛС. На перші входи кореляторів 19 кореляційного аналізатора 12 через-КДП 11 подаються вихідні сигнали N доплерівських фільтрів ФN / 21 , ФN / 2 ,...ФN / 21 основного каналу, які реалізуються за допомогою процесора ДПФ 14. На другі входи кореляторів 19 кореляційного аналізатора 12 через КДП 13 таким самим чином подаються вихідні сигнали N фазових (допплерівських) фільтрів ФN / 21 , ФN / 2 ,...ФN / 21 45 50 55 компенсаційного каналу, які реалізуються за допомогою процесора ДПФ 16. Вихід кожного з кореляторів 19 підключений до відповідної ЦЛЗ 20. Відводи кожної ЦЛЗ 20 підключені до відповідного пристрою вибору максимуму за дальністю 21. Виходи пристроїв вибору максимуму за дальністю 21 підключені до пристрою вибору максимуму за фільтром 22. Вихід пристрою вибору максимуму за фільтром 22 є виходом кореляційного аналізатора 12 та підключений до формувача вагового коефіцієнта 15. Корисна модель працює наступним чином: Входи основного 1 та компенсаційного 2 каналів прийому підключаються, до дуально поляризованої антени, якою приймаються як корисні сигнали, так і активні та пасивні завади. Сигнали, прийняті основним каналом І, через комутатор 3 потрапляють до ЗП 5, де у вигляді матриці MN запам'ятовуються відгуки довжиною М елементів розділення за дальністю, віддзеркалені від N когерентних зондувальних сигналів та активні і пасивні завади. Таким саме чином сигнали, прийняті компенсаційним каналом 2, через комутатор 4 потрапляють до ЗП 7, де у вигляді матриці MN запам'ятовуються відгуки когерентного пакета з N сигналів, та завади, які прийняті компенсаційним каналом 2. Після того, як відгуки на всю пачку імпульсів прийнято та запам'ятовано у ЗП 5 та 7, комутатори 3 та 4 перемикають виходи основного І та 2 UA 121464 U 5 10 компенсаційного 2 каналів до ЗП 6 та 8, відповідно. У ЗП 6 та 8 відбувається накопичення наступної пачки, а прийнята у ЗП 5 та 7 пачка буде в цей час піддаватися обробці за наступним алгоритмом. Комутатори, 9 і 10 з'єднують, відповідно, ЗП 5, 7 з КДП 11 і 13. Процесори ДПФ 14 та 16 через КДП 11 та 13, відповідно, виконують обчислення М-точкового ДПФ рядків матриць, запам'ятованих у ЗП 5 та 7, в результаті чого рядки цих матриць замінюються їх ДПФ. Тобто відбувається часова фільтрація сигналів основного та компенсаційного каналів набором з N доплерівських фільтрів. Після часової фільтрації вміст ЗП 5 та 7 паралельно по рядках, послідовно по стовпцях через КДП 11 та 13 подається на корелятори 19 кореляційного аналізатора, 12. Модуль нормованого коефіцієнта міжканальної кореляції може бути розрахованим за методом "ковзаючого вікна" на інтервалах з m елементів розділення за дальністю за формулою: U 0U k U0 15 2 Uk , (1) 2 де U 0 и U k комплексні значення сигналів на виході однойменних фазових фільтрів основного (ЗП 5) та компенсаційного (ЗП 7) каналів, відповідно; - операція комплексного спряження; - операція усереднення. Таким чином: у лініях затримки 20 зберігається розподіл нормованого коефіцієнта міжканальної кореляції за дальністю І часом) окремо дня кожного фазового фільтра ФN / 21 , 20 25 30 ФN / 2 ,...ФN / 21 Відводи ліній затримки 20 визначаються інтервалом усереднення у виразі (1) і зроблені з кроком, що відповідає часу адаптації вагових коефіцієнтів автокомпенсатора. Пристрої вибору максимуму за дальністю 21 у кожному з фільтрів окремо визначають на якому відрізку дальності (часу) спостерігався найбільший для цього фільтра нормований коефіцієнт міжканальної кореляції та його значення. Пристрій вибору максимуму за фільтром 22 порівнює значення нормованого коефіцієнта міжканальної кореляції на виходах пристроїв вибору максимуму за дальністю 21 та визначає, у якому фільтрі спостерігався найбільший з цих максимумів. Формувач вагових коефіцієнтів 15 на підставі цієї інформації через КДП 11 та 13 отримує запам'ятовані у ЗП 5 та 7 відповідні фрагменти вихідних сигналів визначених однойменних доплерівських фільтрів. На підставі цих фрагментів формувач вагових коефіцієнтів 15 розраховує значення вагових коефіцієнтів К автокомпенсатора за виразом U 0U k . (2) K 2 Uk 35 40 45 50 Після розрахунку вагових коефіцієнтів за формулою (2) вони подаються на другий вхід помножувача 18, КДП 11 та 13 поелементно подають дані основного та компенсаційного каналів, відповідно на суматор авто компенсатора 17 та помножувач 18. В суматорі автокомпенсатора 17 відбувається компенсація завади. Скомпенсовані елементи пачки імпульсів подаються на подальшу обробку до пристрою виявлення PЛC, який на схемі не показано. Після закінчення обробки комутатори 3, 4, 9, 10 перемикаються таким чином, що на обробку подається вміст ЗП 6 та 8, а дані нового пакета надходять до ЗП 5 та 7 і т.д. Завдяки використання як спектральних, так і часових відмінностей в структурі активної і пасивної складової комбінованої завади запропонований спосіб компенсації активної складової комбінованої завади забезпечує суттєве зменшення впливу пасивної завади на процес адаптації вагових коефіцієнтів авто компенсатора активних шумових завад та підвищує його ефективність. Джерело інформації: 1. Пат. 3881177 США, МПК G01S 7/36. Frequeneyagile-basebandsidelobecanceller [Електронний ресурс] / Len Joseph F, Rankin Peter M; заявл. 12.03.1974; опубл. 29.04.1975, Режим доступу: http://docs.google.com/viewer?url=patentin'ictgc!:. storage. googieapis.com/pdfs/US388 1177.pdf. 2. Пат. 91114 Україна, МПК G01S 7/36 Н04В 15/00. Спосіб захисту радіолокаторів від комбінованих завад, діючих по головному променю діаграми спрямованості антени 3 UA 121464 U 5 10 [Електронний ресурс] Д.М. Піза, А.С. Сіренко, Є.О. Звягінцев; заявл. 20.12.2013; опубл. 25.06.2014, Бюл. № 12/2014 Режим доступу: http://base.ukrpatent.org/search.php?action=viewdetails&IdClaim=201846&chapter=description. 3. Пат. 48705 Україна МПК9 G01S 7/36, Н04В S5/00 Спосіб компенсації активної складової комбінованої зава щ [Електронний ресурс] / В.Я. Кононович, А.П. Кукольницький, О.П. Залевський, О.Г. Каспирович, Ю.Л. Мейстер, А.А. Денека; заявл. 06.11.2009; опубл.25.03.2010, бюл. № 6/2010 Режим доступу: http://base.ukrpatent.org/search.php? action=viewdetails&IdClaim=143619&chapter=description. 4. Журавльов А.К. Адаптивные радиотехнические системы с антенними решетками [Текст]/ А.К. Журавльов, В.А. Хлебников и др. - Л.: Изд. Ленинградского университета, 1991. - 544 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 Спосіб компенсації активної складової комбінованої завади когерентно-імпульсних радіолокаційних станцій з пачковою вобуляцією частоти повторення зондуючих імпульсів, який базується на адаптації вагових коефіцієнтів, незмінних для всіх дискретів дальності кожної частотної пачки, за яким після часової фільтрації проводять просторову (або поляризаційну) фільтрацію, який відрізняється тим, що у фазових фільтрах, які найбільш віддалені від фільтрів, що можуть містити пасивні завади, на інтервалах дальності, довжина яких еквівалентна часу адаптації вагових коефіцієнтів, шляхом вирахування модулів нормованих коефіцієнтів міжканальної кореляції та їх порівняння визначають інтервал з найменшим рівнем пасивної завади в кожних однойменних фазових фільтрах основного та компенсаційного каналу, після вирахуваних модулів нормованих коефіцієнтів кореляції на визначених інтервалах дальності вибирають однойменні фазові фільтри основного та компенсаційного каналів з найменшим рівнем пасивної завади для формування вагових коефіцієнтів, при цьому сформовані вагові коефіцієнти використовують для компенсації активної складової комбінованої завади в кожному фазовому фільтрі кожного дискрету дальності. 4 UA 121464 U Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H04B 15/00, G01S 7/36
Мітки: комбінованої, спосіб, складової, завади, компенсації, активної
Код посилання
<a href="https://ua.patents.su/7-121464-sposib-kompensaci-aktivno-skladovo-kombinovano-zavadi.html" target="_blank" rel="follow" title="База патентів України">Спосіб компенсації активної складової комбінованої завади</a>
Спосіб компенсації активної складової комбінованої завади

Номер патенту: 114213
Опубліковано: 10.05.2017
Автори: Звягінцев Євген Олександрович, Піза Дмитро Макарович
МПК: H04B 15/00, G01S 7/36
Мітки: спосіб, комбінованої, компенсації, складової, активної, завади
Формула / Реферат:
Спосіб компенсації активної складової комбінованої завади імпульсних РЛС з пачковою вобуляцією зондуючих імпульсів, за яким після часової фільтрації проводиться просторова (поляризаційна) фільтрація, при виконанні якої формування вагових коефіцієнтів виконується у межах поточної пачки по інформації фазових фільтрів, що найбільш віддалені від фазових фільтрів, що можуть містити спектри пасивних завад, який відрізняється тим, що на інтервалах...
Спосіб компенсації активної складової комбінованої завади

Номер патенту: 48705
Опубліковано: 25.03.2010
Автори: Мейстер Юрій Лазарович, Денека Анатолій Анатолійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Каспирович Олександр Геннадійович, Залевський Олексій Павлович, КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ
МПК: H04B 15/00, G01S 7/36
Мітки: активної, компенсації, завади, комбінованої, спосіб, складової
Формула / Реферат:
Спосіб компенсації активної складової комбінованої завади в імпульсних радіолокаторах з пачковою вобуляцією частоти повторення зондуючих імпульсів, який базується на адаптації вагового коефіцієнта, незмінного для всіх дискретів дальності для кожної частотної пачки, який відрізняється тим, що на першому етапі фільтрації проводиться часова, а на другому етапі - просторова (поляризаційна) фільтрація, при цьому, формування вагового коефіцієнта...
Спосіб захисту імпульсного радіолокатора від активної складової комбінованої завади
Номер патенту: 120630
Опубліковано: 10.11.2017
Автори: Морщавка Сергій Володимирович, Піза Дмитро Макарович, Семенов Дмитро Сергійович
МПК: G01B 1/00, H04B 15/00
Мітки: активної, складової, радіолокатора, імпульсного, завади, захисту, комбінованої, спосіб
Формула / Реферат:
Спосіб захисту імпульсного радіолокатора від активної складової комбінованої завади, за яким основним та компенсаційним каналом приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагових коефіцієнтів поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигнали на тлі пасивних завад та відображають...
Спосіб захисту когерентно-імпульсної радіолокаційної станції від комбінованих завад
Номер патенту: 59472
Опубліковано: 10.05.2011
Автори: Рудик Олександр Володимирович, Залевський Олексій Павлович, Піза Дмитро Макарович
МПК: H04B 15/00, G01S 7/36
Мітки: завад, радіолокаційної, захисту, когерентно-імпульсної, станції, комбінованих, спосіб
Формула / Реферат:
Спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад, за яким основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагових коефіцієнтів поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигнали на тлі пасивних завад та...
Спосіб захисту радіолокаторів від комбінованих завад, діючих по головному променю діаграми спрямованості антени
Номер патенту: 91114
Опубліковано: 25.06.2014
Автори: Сіренко Андрій Сергійович, Звягінцев Євген Олександрович, Піза Дмитро Макарович
МПК: G01S 7/36, H04B 15/00
Мітки: захисту, головному, діючих, спрямованості, радіолокаторів, антени, спосіб, комбінованих, завад, діаграми, променю
Формула / Реферат:
Спосіб захисту радіолокаторів від комбінованих завад, діючих по головному променю діаграми спрямованості антени, за яким основним та компенсаційним каналами радіолокатора приймають корисні сигнали та завади, які діють по головному променю діаграми спрямованості антени, компенсують активну шумову задачу шляхом регулювання вагових коефіцієнтів поляризаційного фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням...
Попередній патент: Спосіб лікування автоімунного тиреоїдиту
Наступний патент: Спосіб просторової селекції джерел радіовипромінювання в довільній хвильовій зоні
Випадковий патент: Сульфонамідні похідні, спосіб їх одержання та фармацевтична композиція на їх основі