Автоматична система керування та наведення вогню мобільного мінометного комплексу
Формула / Реферат
1. Автоматична система керування та наведення вогню мобільного мінометного комплексу, що містить пульт керування; систему керування розвантаженням та завантаженням мінометної установки, яка включає приводи розвантаження/завантаження та датчики контролю розвантаженням/завантаженням; систему керування наведенням ствола мінометної установки, яка включає приводи наведення та датчики контролю наведенням; систему позиціонування та орієнтування мобільного мінометного комплексу, яка включає GPS та інерціальну навігаційну систему; систему зв’язку та обміну даними мобільного мінометного комплексу, яка включає засоби передачі та прийому мовної та цифрової інформації; систему контролю за боєукладанням, яка включає датчики збору та передачі інформації про стан боєприпасу, та засіб живлення, яка відрізняється тим, що автоматична система керування та наведення вогню мобільного мінометного комплексу містить блок обчислення, з’єднаний з засобами передачі та прийому мовної та цифрової інформації, та з блоком обробки інформації, на якому встановлені програмний блок збору та обробки інформації, яка надходить від GPS та інерціальної навігаційної системи, драйвери для приводів системи розвантаження/завантаження та драйвери для приводів наведення системи керування наведенням ствола мінометної установки, що включають приводи підйому та повороту ствола у горизонтальній та вертикальній площинах, система позиціонування та орієнтування мобільного мінометного комплексу включає щонайменше два осьові датчики положення рівня транспортного засобу відносно поверхні землі, опорної плити та ствола мінометної установки; система зв’язку та обміну даними мобільного мінометного комплексу виконана з можливістю роботи на фіксованих частотах в режимі захисту від завад.
2. Автоматична система керування та наведення вогню мобільного мінометного комплексу за п. 1, яка відрізняється тим, що осьові датчики положення системи позиціонування та орієнтування мобільного мінометного комплексу виконані у вигляді інклінометрів.
Текст
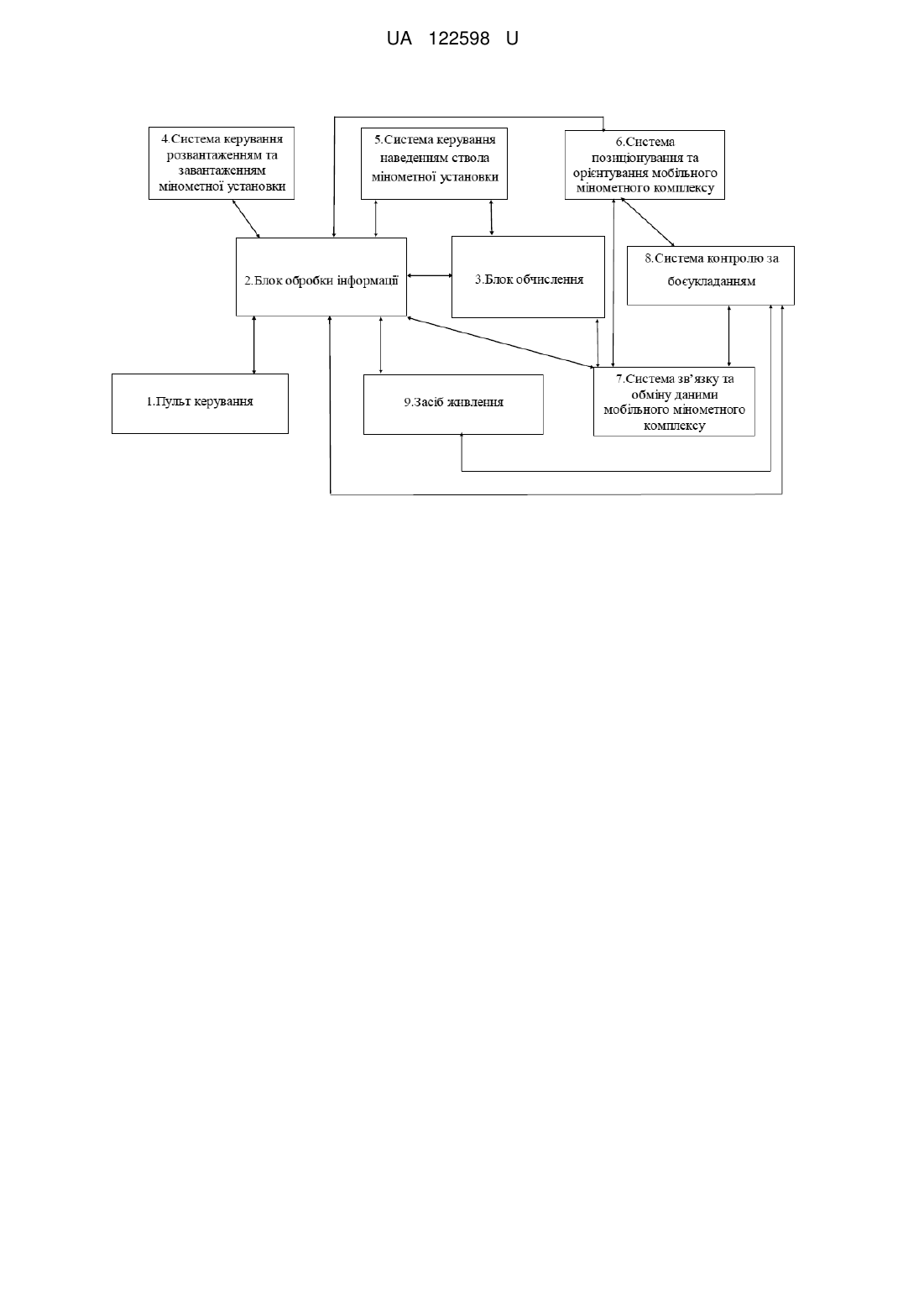
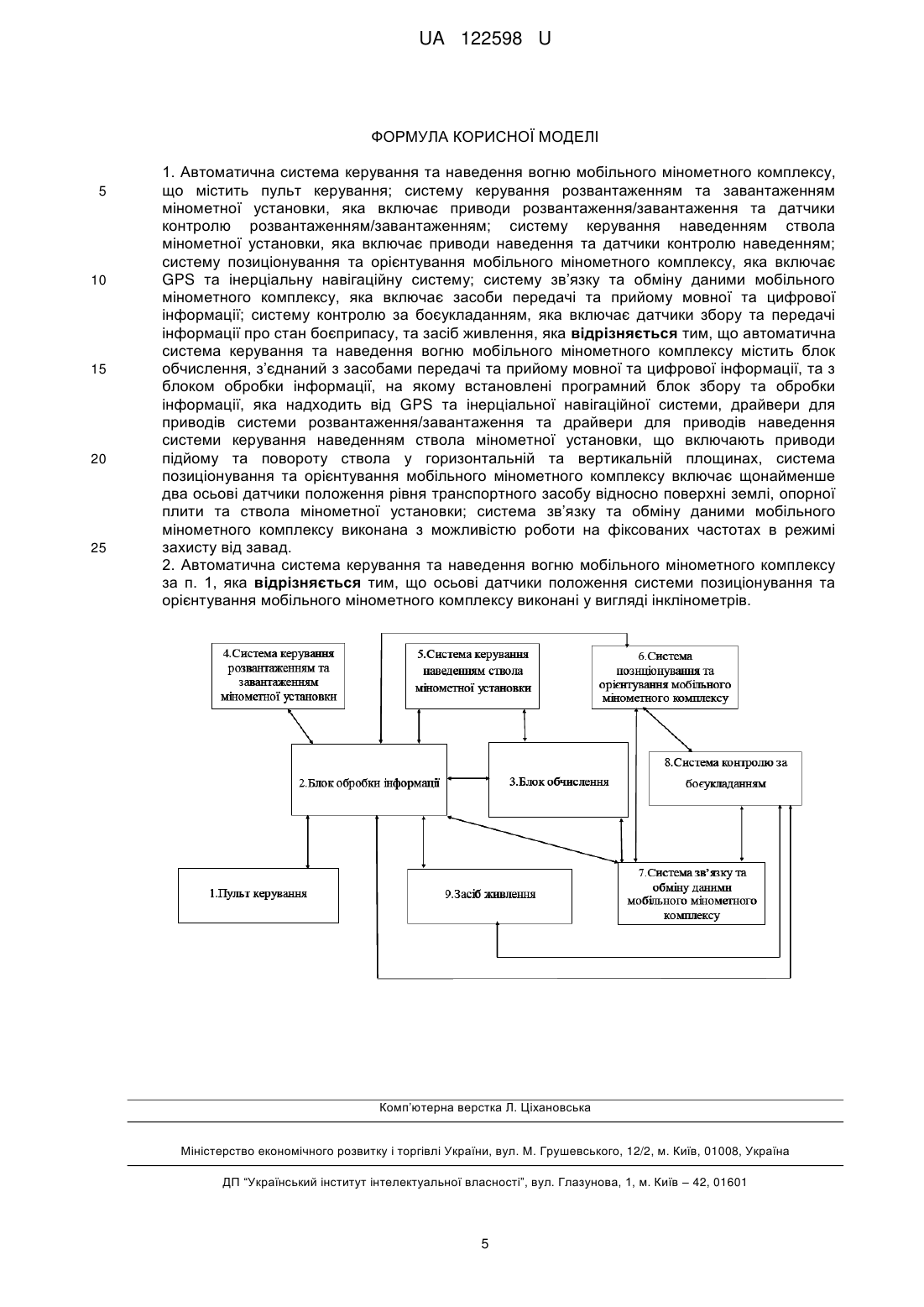
Реферат: Автоматична система керування та наведення вогню мобільного мінометного комплексу містить пульт керування; систему керування розвантаженням та завантаженням мінометної установки, яка включає приводи розвантаження/завантаження та датчики контролю розвантаженням/завантаженням; систему керування наведенням ствола мінометної установки, яка включає приводи наведення та датчики контролю наведенням; систему позиціонування та орієнтування мобільного мінометного комплексу, яка включає GPS та інерціальну навігаційну систему; систему зв’язку та обміну даними мобільного мінометного комплексу, яка включає засоби передачі та прийому мовної та цифрової інформації; систему контролю за боєукладанням, яка включає датчики збору та передачі інформації про стан боєприпасу, та засіб живлення. Автоматична система керування та наведенням вогню мобільного мінометного комплексу містить блок обчислення, з’єднаний з засобами передачі та прийому мовної та цифрової інформації, та з блоком обробки інформації, на якому встановлені програмний блок збору та обробки інформації, яка надходить від GPS та інерціальної навігаційної системи, драйвери для приводів системи розвантаження/завантаження та драйвери для приводів наведення системи керування наведенням ствола мінометної установки, що включають приводи підйому та повороту ствола у горизонтальній та вертикальній площинах, система позиціонування та орієнтування мобільного мінометного комплексу включає щонайменше два осьові датчики положення рівня транспортного засобу відносно поверхні землі, опорної плити та ствола мінометної установки; система зв’язку та обміну даними мобільного мінометного комплексу виконана з можливістю роботи на фіксованих частотах в режимі захисту від завад. UA 122598 U (54) АВТОМАТИЧНА СИСТЕМА КЕРУВАННЯ ТА НАВЕДЕННЯ ВОГНЮ МОБІЛЬНОГО МІНОМЕТНОГО КОМПЛЕКСУ UA 122598 U UA 122598 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі озброєння, зокрема до області автоматичних систем керування та наведення озброєнням, а саме до автоматичної системи керування та наведення вогню мобільного мінометного комплексу, та може бути використана в складі мобільного мінометного комплексу. В сучасних мобільних мінометних комплексах для покращення та пришвидшення роботи комплексу використовуються автоматизовані системи керування та наведення вогнем. Відомі аналоги автоматичних систем керування та наведення вогнем мобільної мінометної установки, серед яких за сукупністю суттєвих ознак найближчими є наступні. Відомий апаратно-програмний комплекс автоматизованого управління вогнем артилерійського підрозділу, який містить метеорологічну станцію, термінал командира батареї, виконаний у вигляді переносного комп′ютерного пристрою, який виконаний із можливістю позначення цілей електронній мапі у тривимірній системі координат за інформацією, отриманою від засобів розвідки артилерійського підрозділу та інших військових формувань, вибору цілей для ураження, віддавання наказів щодо ураження цілей та отримання інформації про їх виконання, щонайменше два підключених до пристроїв навідників термінали командирів гармат, які виконані у вигляді комп′ютерних пристроїв та із можливістю визначення координат гармат підрозділу, отримання наказів щодо ураження цілей, передавання інформації про виконання наказів, про наявність боєприпасів, готовність гармат до ведення вогню та передачі наказів щодо ураження цілей та відповідних остаточних даних щодо кутів наведення гармати та параметрів вогню гармати до пристроїв навідників, причому термінал командира батареї та термінали командирів гармат зв′язані за допомогою цифрового радіозв′язку, мають відповідне програмне забезпечення та виконані із можливістю архівації обміну бойовою інформацією, відповідно до корисної моделі, пристрої навідників виконані у вигляді терміналів, метеорологічна станція та усі термінали комплексу виконані переносними, комплекс включає термінал старшого офіцера батареї із відповідним програмним забезпеченням, пов′язаний з терміналом командира батареї, метеорологічною станцією, терміналами командирів гармат, який виконаний із можливістю отримання наказів щодо ураження вибраних цілей з термінала командира батареї та відправки на термінал командира батареї підтвердження отримання та виконання наказів, здійснення балістичних розрахунків з урахуванням координат вибраних цілей та інформації, отриманої від метеорологічної станції, відправки даних балістичних розрахунків відповідно до вибраних цілей на термінали командирів гармат, при цьому термінал командира батареї виконаний з можливістю позначення спостережного пункту, вогневої позиції, небезпечного об′єкта, цілей для рухомого та нерухомого загороджувального вогню та відправки даних щодо положення позначених об′єктів на термінал старшого офіцера батареї для корегування балістичних розрахунків, термінал старшого офіцера батареї виконаний з можливістю виконання функцій термінала командира батареї, термінали командирів гармат виконані з можливістю виконання функцій старшого офіцера батареї щодо виконання балістичних розрахунків для кожної окремої гармати відповідно, при цьому кожен з терміналів виконаний з можливістю використання будь-якого типу електронних мап та оснащений модулем визначення місцезнаходження, наприклад GPS-модулем, а всі електронні компоненти комплексу з′єднані між собою за допомогою мережі цифрового радіозв′язку Wi-Fi (Патент України №108847, опубл. 25.07.2016р.). Недоліком даного аналогу є те, що дана система являється складною у використанні, потребує тривалого часу обробки інформації та орієнтована на гарматні установки. Найближчим аналогом є автоматизована система керування вогнем мобільного мінометного комплексу, яка складається з засобів керування, що містять пульт керування командира, керуючий і виконуючий пристрої горизонтального наведення, керуючий і виконуючий пристрої вертикального наведення, з засобів балістичного забезпечення, засобів зв'язку у вигляді цифрового каналу, відповідно до корисної моделі, що засоби керування додатково містять комп'ютер з системою підтримки прийняття рішень (СППР), керуючий і виконуючий пристрої встановлення об'єкта керування (міномета) на поверхню землі, лампу-сигналізатор встановлення міномета на поверхню місцевості, блок гіроскопічних датчиків рівня (БГДР) плити міномета, індикатор кута відхилення плити об'єкта керування від площини горизонту в поздовжній та поперечній площинах, датчики кутів горизонтального та вертикального наведення ствола міномета, індикатори відображення кутів горизонтального та вертикального наведення ствола міномета, засіб визначення дальності у вигляді лазерного далекоміра, засоби визначення дирекційного кута у вигляді бусолі з гіроскопічною насадкою, а засоби балістичного забезпечення виконані у вигляді балістичної станції та термометра для вимірювання температури зарядів, крім того автоматизована система керування вогнем мобільного мінометного комплексу також містить засіб топогеодезичного забезпечення у вигляді блока 1 UA 122598 U 5 10 15 20 25 30 35 40 45 50 55 навігаційної апаратури та засіб метеорологічного забезпечення у вигляді мобільної метеостанції з безпровідним інтерфейсом, при цьому комп'ютер, зі встановленою в ньому системою підтримки прийняття рішень, входами-виходами з'єднаний з виходами-входами цифрових каналів зв'язку, виходами-входами блока навігаційної апаратури, інші входи з'єднані з виходами метеостанції, балістичної станції та датчиком температури, вхід комп'ютера з'єднаний з виходом блока гіроскопічних датчиків рівня плити міномета, який з'єднаний з індикаторами кута відхилення плити об'єкта керування від площини горизонту в поздовжній та поперечній площинах, комп'ютер іншими входами-виходами з'єднаний з виходами-входами пульта керування командира мобільного мінометного комплексу, другий вихід пульта керування з'єднаний з входом керуючого пристрою, вихід якого з'єднаний з входом виконуючого пристрою встановлення об'єкта керування на поверхню землі, який з'єднаний з лампою сигналізатором встановлення міномета на поверхню місцевості, яка з'єднана з комп'ютером, третій та четвертий виходи пульта керування з'єднані з входами керуючих пристроїв вертикального та горизонтального наведення, виходи з яких з'єднані з входами виконуючих пристроїв та вертикального та горизонтального наведення міномета відповідно, виходи датчиків відхилень ствола міномета від горизонтальної та вертикальної площини з'єднані з входами комп'ютера і крім того з'єднані з індикаторами відображення кутів горизонтального і вертикального наведення ствола міномета, входи-виходи засобів визначення дальності та дирекційного кута цілі з'єднані через цифрові канали зв'язку з виходами-входами комп'ютера (Патент України №117956, опублікований 10.07.2017р.). Недоліком є те, що дана система є складною у використанні та потребує тривалого часу обробки інформації. В основу корисної моделі поставлено задачу створення автоматичної системи керування та наведення вогнем мобільного мінометного комплексу, яка в поєднанні з мінометною установкою та броньованим транспортним засобом, шляхом введення в систему засобів керування, що підвищить мобільність, самостійність мобільного мінометного комплексу з виконання бойових завдань, підвищить вогневу продуктивність, маневреність, покращить точність стрільби та захист екіпажу з одночасним спрощенням експлуатації системи. Поставлена задача вирішується таким чином, що автоматична система керування та наведення вогню мобільного мінометного комплексу містить пульт керування; систему керування розвантаженням та завантаженням мінометної установки, яка містить приводи розвантаження/завантаження та датчики контролю розвантаженням/завантаженням; систему керування наведенням ствола мінометної установки, яка включає приводи наведення та датчики контролю наведенням; систему позиціонування та орієнтування мобільного мінометного комплексу, яка включає GPS та інерціальну навігаційну систему; систему зв'язку та обміну даними мобільного мінометного комплексу, яка включає засоби передачі та прийому мовної та цифрової інформації; систему контролю за боєукладанням, яка включає датчики збору та передачі інформації про стан боєприпасу, та засіб живлення, згідно з корисною моделлю, автоматична система керування та наведення вогню мобільного мінометного комплексу містить блок обчислення, з'єднаний з засобами передачі та прийому мовної та цифрової інформації, та з блоком обробки інформації, на якому встановлені програмний блок збору та обробки інформації, яка надходить від GPS та інерціальної навігаційної системи, драйвери для приводів системи розвантаження/завантаження та драйвери для приводів наведення системи керування наведенням ствола мінометної установки, що включають приводи підйому та повороту ствола у горизонтальній та вертикальній площинах, система позиціонування та орієнтування мобільного мінометного комплексу включає щонайменше два осьові датчики положення рівня транспортного засобу відносно поверхні землі, опорної плити та ствола мінометної установки; система зв'язку та обміну даними мобільного мінометного комплексу виконана з можливістю роботи на фіксованих частотах в режимі захисту від завад. При цьому осьові датчики положення системи позиціонування та орієнтування мобільного мінометного комплексу можуть бути виконані у вигляді інклінометрів. Причинно-наслідковий зв'язок між сукупністю ознак, що заявляються, та технічним результатом, який досягається при її використанні, існує наступний. Згідно з корисною моделлю, автоматична система керування та наведення вогню мобільного мінометного комплексу містить блок обчислення. Блок обчислення здійснює перерахунок полярних кутів спочатку в азимутальні, потім в дирекційні, і в останню чергу в імпульси, якими керується кожний конкретний привід наведення. Таким чином, виконання у вказаній системі блока обчислення дозволяє забезпечити автоматизацію керування приводами наведення. 2 UA 122598 U 5 10 15 20 25 30 35 40 45 50 55 60 Згідно з корисною моделлю, блок обчислення з'єднаний з засобами передачі та прийому мовної та цифрової інформації, що дозволяє забезпечити безпосередній контакт системи керування наведенням ствола мінометної установки та системи зв'язку та обміну даними мобільного мінометного комплексу, і таким чином, автоматизувати роботу і точність наведення ствола мінометної установки. Згідно з корисною моделлю, блок обчислення з'єднаний з блоком обробки інформації, на якому встановлені програмний блок збору та обробки інформації, яка надходить від GPS та інерціальної навігаційної системи, драйвери для приводів системи розвантаження/завантаження та драйвери для приводів наведення системи керування наведенням ствола мінометної установки, що включають приводи підйому та повороту ствола у горизонтальній та вертикальній площинах. Виконання блока обробки інформації зі встановленими елементами зі з'єднанням з блоком обчислення дозволяє забезпечити передачу даних між самою системою керування та блоком обчислення, де як вже було вказано вище здійснюється перерахунок полярних кутів. Виконання блока обробки інформації в системі керування та наведення вогню мобільного мінометного комплексу забезпечує приймання інформації від різних датчиків (датчиків рівня, навігаційних систем, тощо) та врахування їх показників та похибок на перерахування ввідних даних на кут нахилу прицілювання (ствола мінометної установки), відповідно, від заданих на них цілевказівників, за рахунок приводів підйому та повороту ствола у горизонтальній та вертикальній площинах, а також автоматизацію керування приводами розвантаження/завантаження, зокрема розвантаження та установку мінометної установки на підготовлену або не підготовлену поверхню, фіксування мінометної установки у бойовій позиції, завантаження мінометної установки у транспортний засіб, фіксування мінометної установки у транспортному засобі для його безпечного транспортування. Додатково блок обробки інформації дозволяє забезпечити зв'язок живлення з конструкцією мобільної мінометної установки, зокрема з приводами та датчиками. Згідно з корисною моделлю, система позиціонування та орієнтування мобільного мінометного комплексу включає щонайменше два осьові датчики положення рівня транспортного засобу відносно поверхні землі, опорної плити та ствола мінометної установки, при цьому, відповідно до ще однієї з ознак корисної моделі, осьові датчики положення виконані у вигляді інклінометрів. Виконання вказаних датчиків в системі позиціонування та орієнтування мобільного мінометного комплексу дозволяє забезпечити вимірювання кутів нахилу, повороту, а також контролювати поздовжній і поперечний нахил відносно поверхні землі, опорної плити та ствола мінометної установки. Згідно з корисною моделлю, система зв'язку та обміну даними мобільного мінометного комплексу виконана з можливістю роботи на фіксованих частотах в режимі захисту від завад. Таке виконання системи дозволяє засобам передачі та прийому мовної та цифрової інформації працювати в умовах постановки навмисних завад, зокрема за рахунок псевдовипадкової перебудови робочої частоти. Суть корисної моделі пояснюється наступним прикладом виконання та кресленням, де показана схема автоматичної системи керування та наведення вогню мобільного мінометного комплексу. Зображувальні матеріали, що ілюструють заявлену корисну модель, а також наведений приклад конкретного виконання ніяким чином не обмежують обсяг варіантів виконань, викладений у формулі, а тільки пояснюють суть корисної моделі. Автоматична система керування та наведення вогню мобільного мінометного комплексу містить: 1 - пульт керування, 2 - блок обробки інформації, 3 - блок обчислення, 4 - система керування розвантаженням та завантаженням мінометної установки, 5 - система керування наведенням ствола мінометної установки, 6 - система позиціонування та орієнтування мобільного мінометного комплексу, 7 - система зв'язку та обміну даними мобільного мінометного комплексу, 8 - система контролю за боєукладанням, 9 - засіб живлення. Пуль керування 1 з'єднаний з блоком обробки інформації 2, що виконаний у вигляді планшета. На блок обробки інформації 2 встановлені програмний блок збору та обробки інформації, яка надходить від GPS та інерціальної навігаційної системи, драйвери для приводів системи розвантаження/завантаження та драйвери для приводів наведення системи керування наведенням ствола мінометної установки. 3 UA 122598 U 5 10 15 20 25 30 35 40 45 50 55 Система керування розвантаженням та завантаженням мінометної установки 4 включає приводи розвантаження/завантаження та датчики контролю розвантаженням/завантаженням. Приводи розвантаження/завантаження виконані у вигляді гідроциліндрів та сполучені з механізмами розвантаженням/завантаженням, що складають конструкцію мінометної установки. Вказана система 4 з'єднана з блоком обробки інформації 2. Система керування наведенням ствола мінометної установки 5 містить приводи наведення та датчики контролю наведенням. Приводи наведення в свою чергу включають приводи підйому та повороту ствола у горизонтальній та вертикальній площинах, при чому приводи підйому та повороту виконані у вигляді циліндричного корпусу із приводом гвинт-гайка та поворотного столу з редуктором відповідно. Вказана система 5 з'єднана з блоком обробки інформації 2. Система позиціонування та орієнтування мобільного мінометного комплексу 6 включає GPS та інерціальну навігаційну систему, дані від яких надходять до програмного блока збору та обробки інформації, що встановлений на блока обробки інформації 2, таким чином вказана система 6 з'єднана з блоком обробки інформації 2. Система 6 також включає два осьові датчики положення рівня транспортного засобу відносно поверхні землі, опорної плити та ствола мінометної установки, що виконані у вигляді інклінометрів. Система зв'язку та обміну даними мобільного мінометного комплексу 7 включає засоби передачі та прийому мовної та цифрової інформації, що виконані у вигляді радіостанції, або іншими відомими з рівня техніки засобами. Система 7 працює на фіксованих частотах в режимі захисту від завад. Режим захисту від завад забезпечує зв'язок в умовах постановки навмисних перешкод. Вказана система 7 з'єднана з блоком обробки інформації 2, а також з системою позиціонування та орієнтування мобільного мінометного комплексу 6. Система контролю за боєукладанням 8 містить датчики збору та передачі інформації про стан боєприпасу, зокрема про кількість боєприпасів, наявність підривача, основного метального заряду, додаткових зарядів та їх температуру. Вказана система 7 з'єднана з блоком обробки інформації 2, а також з системою позиціонування та орієнтування мобільного мінометного комплексу 6, системою зв'язку та обміну даними мобільного мінометного комплексу 7. Блок обчислення 3 виконаний у вигляді комп'ютера. Блок обчислення 3 з'єднаний з блоком обробки інформації 2 та системою зв'язку та обміну даними мобільного мінометного комплексу 7, зокрема з засобами передачі та прийому мовної та цифрової інформації. Засіб живлення 9 виконаний у вигляді акумуляторної батареї та з'єднаний з блоком обробки інформації 2 та системою контролю за боєукладанням 8. Запропонована корисна модель працює наступним чином. Отриманні всі вхідні дані (від системи керування розвантаженням та завантаженням мінометної установки 4, системи керування наведенням ствола мінометної установки 5, системи позиціонування та орієнтування мобільного мінометного комплексу 6, системи зв'язку та обміну даними мобільного мінометного комплексу 7, системи контролю за боєукладанням 8) надходять до блока обробки інформації 2. Блок обробки інформації 2, в свою чергу, показує відповідний стан механізмів мінометної установки на індикаторах пульту керування 1 оператора. Оператор проводить балістичні розрахунки на ціль з отриманих розвідувальних даних. Розрахована інформація від оператора потрапляє на блок обробки інформації 2 і там перераховується, враховуючи похибки рівня та куту положення транспортного засобу, плити мінометної та ствола міномета. Розрахована інформація надходить до блока обчислення 3, де проходить ряд обчислювань, і вже інформація в імпульсних даних поступає на приводи наведення ствола мінометної установки. Після наведення ствола мінометної установки на ціль та проведення пострілу датчики контролю наведенням зчитують інформацію про положення ствола міномета (так як під час пострілів (від віддачі) положення опорної плити та ствола мінометної установки буде змінюватись) і передають їх на блок обробки інформації 2. Після цього цикл автоматичної системи керування та наведення вогню розпочинається знову. Таким чином, запропонована корисна модель дозволяє створити автоматичну систему керування та наведення вогнем мобільного мінометного комплексу, яка в поєднанні з мінометною установкою та броньованим транспортним засобом, шляхом введення в систему засобів керування, що підвищить мобільність, самостійність мобільного мінометного комплексу з виконання бойових завдань, підвищить вогневу продуктивність, маневреність, покращить точність стрільби та захист екіпажу з одночасним спрощенням експлуатації системи. 4 UA 122598 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 1. Автоматична система керування та наведення вогню мобільного мінометного комплексу, що містить пульт керування; систему керування розвантаженням та завантаженням мінометної установки, яка включає приводи розвантаження/завантаження та датчики контролю розвантаженням/завантаженням; систему керування наведенням ствола мінометної установки, яка включає приводи наведення та датчики контролю наведенням; систему позиціонування та орієнтування мобільного мінометного комплексу, яка включає GPS та інерціальну навігаційну систему; систему зв’язку та обміну даними мобільного мінометного комплексу, яка включає засоби передачі та прийому мовної та цифрової інформації; систему контролю за боєукладанням, яка включає датчики збору та передачі інформації про стан боєприпасу, та засіб живлення, яка відрізняється тим, що автоматична система керування та наведення вогню мобільного мінометного комплексу містить блок обчислення, з’єднаний з засобами передачі та прийому мовної та цифрової інформації, та з блоком обробки інформації, на якому встановлені програмний блок збору та обробки інформації, яка надходить від GPS та інерціальної навігаційної системи, драйвери для приводів системи розвантаження/завантаження та драйвери для приводів наведення системи керування наведенням ствола мінометної установки, що включають приводи підйому та повороту ствола у горизонтальній та вертикальній площинах, система позиціонування та орієнтування мобільного мінометного комплексу включає щонайменше два осьові датчики положення рівня транспортного засобу відносно поверхні землі, опорної плити та ствола мінометної установки; система зв’язку та обміну даними мобільного мінометного комплексу виконана з можливістю роботи на фіксованих частотах в режимі захисту від завад. 2. Автоматична система керування та наведення вогню мобільного мінометного комплексу за п. 1, яка відрізняється тим, що осьові датчики положення системи позиціонування та орієнтування мобільного мінометного комплексу виконані у вигляді інклінометрів. Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: комплексу, система, керування, мінометного, вогню, мобільного, наведення, автоматична
Код посилання
<a href="https://ua.patents.su/7-122598-avtomatichna-sistema-keruvannya-ta-navedennya-vognyu-mobilnogo-minometnogo-kompleksu.html" target="_blank" rel="follow" title="База патентів України">Автоматична система керування та наведення вогню мобільного мінометного комплексу</a>
Автоматизована система керування вогнем мобільного мінометного комплексу
Номер патенту: 117956
Опубліковано: 10.07.2017
Автори: Житник Віктор Євгенович, Макеєв Василь Ілліч, Будник Микола Миколайович, Раскошний Андрій Федорович, Ярема Микола Григорович, Довбиш Анатолій Степанович, Ляпа Микола Миколайович
Мітки: мінометного, система, автоматизована, комплексу, вогнем, мобільного, керування
Формула / Реферат:
Автоматизована система керування вогнем мобільного мінометного комплексу, яка складається з засобів керування, що містять пульт керування командира, керуючий і виконуючий пристрої горизонтального наведення, керуючий і виконуючий пристрої вертикального наведення, з засобів балістичного забезпечення, засобів зв'язку у вигляді цифрового каналу, яка відрізняється тим, що засоби керування додатково містять комп'ютер з системою підтримки прийняття...
Система наведення мінометної установки
Номер патенту: 122595
Опубліковано: 10.01.2018
Автор: Натаров Олексій Павлович
МПК: F41A 27/28, F41A 27/06, F41A 27/00
Мітки: мінометної, система, наведення, установки
Формула / Реферат:
1. Система наведення мінометної установки, що містить лафет з підйомним механізмом, з'єднані зі стволом мінометної установки та закріплені на опорній плиті з опорною чашею, при цьому ствол мінометної установки з'єднаний з казенником, яка відрізняється тим, що лафет з підйомним механізмом з'єднані з опорною плитою за допомогою опорно-поворотного пристрою, на якому розташовано опори, а кульова опора казенника ствола мінометної установки...
Автоматична система керування
Номер патенту: 114881
Опубліковано: 27.03.2017
Автор: Пацкун Іван Васильович
МПК: G01R 31/00, G05B 13/00, G06F 7/48
Мітки: система, керування, автоматична
Формула / Реферат:
1. Автоматична система керування, яка містить корпус, що складається із силового блока, на якому розміщені прошунтовані твердотільні реле Fotek SSR-40DA, блока керування, який містить мікроконтролер "Atmega 2560", оптичну розв’язку, яка зв’язана з мікроконтролером та прошунтованими твердотільними реле, на вхід аналогових входів мікроконтролера розроблена схема, до якої підключаються датчики освітлення, температури, вологості, дощу,...
Інтегрована система пошуку, наведення, стабілізації та керування вогнем “триада-бт”
Номер патенту: 83793
Опубліковано: 25.09.2013
Автори: Цисарж Вячеслав Вікторович, Стецюк Володимир Леонтійович, Баранчук Олександр Іванович, Долеско Анатолій Олександрович, Піронер Ян Михайлович, Яновський Юрій Іванович
МПК: F41G 5/00
Мітки: система, стабілізації, пошуку, інтегрована, наведення, керування, вогнем, триада-бт
Формула / Реферат:
Інтегрована система пошуку, наведення, стабілізації та керування вогнем "Триада-БТ", що містить оптико-електронний модуль, блок керування механізмами інтегрованої системи, привод вертикального наведення, електродвигун приводу вертикального наведення, підсилювач вертикального наведення, датчик кута місця, привод горизонтального наведення, електродвигун приводу горизонтального наведення, підсилювач горизонтального наведення, датчик...
Інтегрована система пошуку, наведення, стабілізації та керування вогнем “триада-бм”
Номер патенту: 83794
Опубліковано: 25.09.2013
Автори: Стецюк Володимир Леонтійович, Баранчук Олександр Іванович, Долеско Анатолій Олександрович, Яновський Юрій Іванович, Цисарж Вячеслав Вікторович, Піронер Ян Михайлович
МПК: F41G 5/00
Мітки: триада-бм, стабілізації, наведення, інтегрована, керування, пошуку, система, вогнем
Формула / Реферат:
Інтегрована система пошуку, наведення, стабілізації та керування вогнем, що містить оптико-електронний модуль, блок керування механізмами інтегрованої системи, привод вертикального наведення, електродвигун приводу вертикального наведення, підсилювач вертикального наведення, датчик кута місця, привод горизонтального наведення, електродвигун приводу горизонтального наведення, підсилювач горизонтального наведення, датчик курсового кута, пульт...
Попередній патент: Механізм ручного дублювання системи наведення мінометної установки
Наступний патент: Мобільний мінометний комплекс з автоматичною системою керування та наведенням вогню
Випадковий патент: Робочий орган культиватора