Радіолокаційна станція спостереження траєкторій балістичних об’єктів при використанні режиму перебудови частоти від імпульсу до імпульсу за випадковим законом
Номер патенту: 122886
Опубліковано: 25.01.2018
Автори: Пампуха Альона Ігорівна, Мірошніченко Олег Вікторович, Лоза Віталій Миколайович, Федоров Артем Костянтинович, Нікіфоров Микола Миколайович, Толок Ігор Вікторович, Пусан Віталій Володимирович, Карпенко Олексій Володимирович, Глухов Сергій Іванович, Прохоров Олег Анатолійович, Пампуха Ігор Володимирович, Загородній Володимир Васильович, Савран Віталій Олександрович
Формула / Реферат
1. Радіолокаційна станція спостереження траєкторій балістичних об'єктів при використанні режиму перебудови частоти, від імпульсу до імпульсу за випадковим законом, яка містить акустичній датчик, який з'єднаний з формувачем імпульсів запуску синхронізації через підсилювач; дисплей, який з'єднаний з основним процесором, до якого під'єднані флеш-пам'ять, радіомодуль WIFI та артилерійський балістичній комп'ютер; передавальна антена, яка під'єднана до керованого високочастотного генератора через підсилювач, який з'єднаний з основним процесором, цифровим сигнальним процесором та фільтром низьких частот, до якого під'єднана приймальна антена; підсилювач низьких частот, який з'єднаний з фільтром низьких частот та вимірювачем частоти, пристрій GPS, магнітній компас, інфрачервоний датчик, вібраційний датчик, модуль вимірювання швидкості обертання снаряда, метеостанція, які підключені до цифрового сигнального процесора, яка відрізняється тим, що з метою підвищення балістичних характеристик пристрою додатково містить модуль вимірювання кутової швидкості обертання снаряда.
2. Радіолокаційна станція за п. 1, який відрізняється тим, що додатково містить інфрачервоний датчик запуску, який спільно з акустичним датчиком формують імпульси запуску, що надходять на формувач імпульсів запуску та синхронізації.
3. Радіолокаційна станція за п. 1, який відрізняється тим, що як високочастотний генератор з фіксованою частотою використовується керований генератор високої частоти, який працює в режимі перебудови частоти, від імпульсу до імпульсу за випадковим законом, що полягає в тому, що кількість імпульсних сигналів, що формуються для випромінювання, вибирає рівною кількості N використовуваних частот випромінювання, а число N вибирають рівним 2k, де k - ціле число, що набуває значення від 6 до 8.
Текст
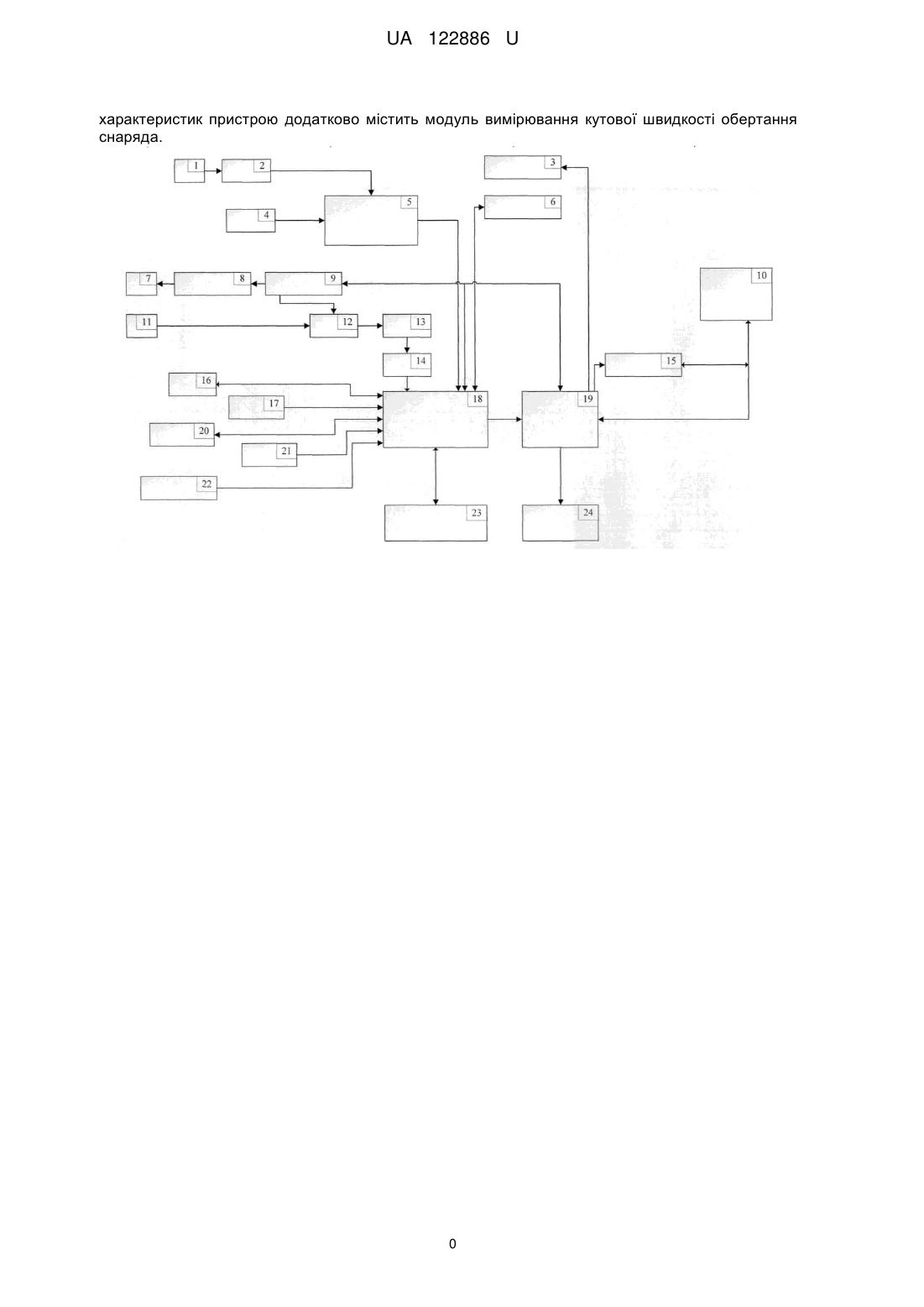
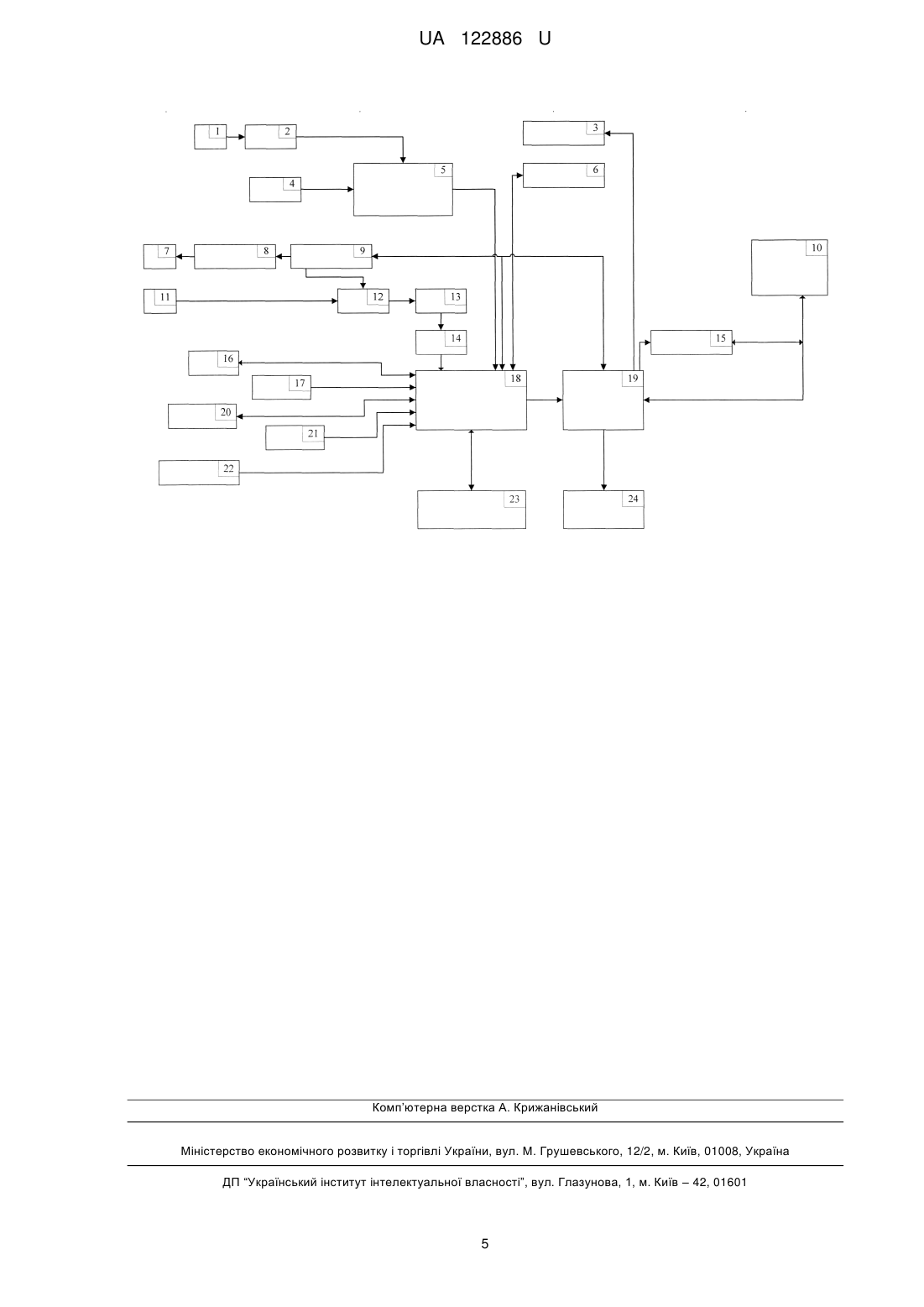
Реферат: Радіолокаційна станція спостереження траєкторій балістичних об'єктів при використанні режиму перебудови частоти від імпульсу до імпульсу за випадковим законом, яка містить акустичний датчик, який з'єднаний з формувачем імпульсів запуску синхронізації через підсилювач; дисплей, який з'єднаний з основним процесором, до якого під'єднані флеш-пам'ять, радіомодуль Wі-Fі та артилерійський балістичний комп'ютер; передавальна антена, яка під'єднана до керованого високочастотного генератора через підсилювач, який з'єднаний з основним процесором , цифровим сигнальним процесором та фільтром низьких частот, до якого під'єднана приймальна антена; підсилювач низьких частот, який з'єднаний з фільтром низьких частот та вимірювачем частоти, пристрій GPS, магнітний компас, інфрачервоний датчик, вібраційний датчик, модуль вимірювання швидкості обертання снаряда, метеостанція, які підключені до цифрового сигнального процесора, причому з метою підвищення балістичних UA 122886 U (12) UA 122886 U характеристик пристрою додатково містить модуль вимірювання кутової швидкості обертання снаряда. 0 UA 122886 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області радіолокації, а саме до засобів радіолокаційного спостереження траєкторій балістичних об'єктів при використанні режиму перебудови частоти, від імпульсу до імпульсу за випадковим законом, що виключає негативний вплив прицільних по частоті навмисних перешкод. Для окремих артилерійських систем значення помилок в відхиленні снарядів може досягти до 2 % по дальності. Водночас, досвід бойових стрільб показує, що використання зарядів різних партій при стрільбі батареї, без точного визначення сумарного відхилення, початкової швидкості снарядів навіть не дозволяє закінчити пристрілку, не кажучи вже про виконання завдань стрільб. Враховуючи значну частку похибки балістичної підготовки в загальній складовій похибки повної підготовки стрільби артилерійських систем (в деяких системах вона складає до 50 %) в багатьох випадках ефективність стрільби залежить від якості проведення заходів балістичної підготовки для кожної артилерійської системи. На навчальну швидкість снаряда впливають велика кількість зовнішніх та внутрішніх параметрів, таких як температура, точка роси, тиск та інші. З метою компенсації цих параметрів та підготовки гармати до стрільби край важно знати начальну швидкість снаряда. Тому оснащення гармат балістичними станціями дозволяє уникнути таких великих помилок при стрільбі. Найбільш близьким аналогом є радіолокаційна система MVRS-700SC MUZZLE VELOCITY RADAR SYSTEM (див. https://www.weibel.dk/solutions/radar/tactical-muzzle-velocity-radars-systems/ Радіолокаційна система MVRS-700SC MUZZLE VELOCITY RADAR SYSTEM призначена для виміру початкової швидкості снаряда за принципом Допплера, обробка сигналу в станції проводиться за допомогою швидкого перетворення Фур'є (ШПФ). Система призначена для установки на танки, гаубиці та інші системи гармат, які з'єднуються з комп'ютером управління їх вогнем. Радіолокаційна система MVRS-700 вміщує в собі: 1. Допплерівську антену, яка виконана з використанням полозкової мікроантенної решітки, встановленої на основній частині гармати; 2. Вбудований надвисоких частот (НВЧ) - перемикач; 3. Вузькосмуговий НВЧ - фільтр; 4. Акустичний датчик; 5. Датчик компенсації руху гармати (опція); 6. Процесор; 7. Display Unit розміщено рядом з наводчиком гармати; 8. Цифрова секція MVRS-700SC містить блок збору і обробки даних для розрахунку усіх результатів; 9. Гнучкий кабель що з'єднує блок процесору та антену. Радіолокаційна система MVRS-700 має кваліфікацію відповідно до стандарту HATOSTANAG4114. Радіолокаційна система MVRS-700 працює так: В момент здійснення пострілу гармати за допомогою вбудованого акустичного датчика, який приводиться в дію і управляється за допомогою процесора, здійснюється виявлення ударної хвилі і антена розпочинає випромінювати сигнал НВЧ-CW високої частоти. Антена допплерівського радіолокатора передає сигнал НВЧ-CW та приймає сигнал, що відбивається від снаряда. Сигнал, відбитий від снаряда, містить інформацію про початкову швидкість снаряда. Вузька смуга НВЧ-фільтра гарантує, що інші радіолокаційні системи, а особливо радари, що мають велику імпульсну потужність, не перенасичують приймач. Сигнал, відбитий від снаряда, подається в блок процесора, де сигнал оцифровується та зберігається для аналізу цифрового сигналу відразу після того, як сигнал був записано. Результат надається оператору на дисплеї за 2 секунди після того, як проведено постріл, одночасно результат надається на комп'ютер управління вогнем (FCC), що підключений до послідовного інтерфейсу блока процесора. Записаний сигнал аналізується в цифровому блоці процесора за допомогою ШПФ для вилучення до 128 точок даних про швидкість снаряда. За допомогою пристрою компенсації руху гармати компенсується рух гармати в час проведення пострілу. Розрахована дульна швидкість передається на FCC по послідовному інтерфейсу, і зберігається в пам'яті для подальшого використання. Система повертається в режим очікування через декілька секунд після здійснення пострілу. Суть способу, який закладений у роботі відомого пристрою, полягає в такому, що радіолокаційна система MVRS-700 має варіант зі змінною частотою, а саме до 5 передаючих частот (за бажанням), які вибираються користувачем. Сигнал НВЧ-CW високої частоти 1 UA 122886 U 5 10 15 20 25 30 35 40 45 50 55 60 управляється з цифрового процесора і випромінюється тільки коли виявлено постріл гармати за допомогою акустичного датчика. Передача сигналу СВЧ-CW високої частоти автоматично відключається після завершення виміру, як правило, 0,5 секунди після виходу снаряда з дула гармати. Недоліком відомого пристрою є обмеження в використанні тільки 5 передаючих частот (за бажанням), які вибираються користувачем, що вказує на недостатню завадостійкість радіолокаційного пристрою, та її скритність під час роботи в бойових порядках. Перед початком зондування робиться аналіз завадової обстановки - визначення рівня зовнішніх завад сигналів на різних робочих частотах. Для роботи використовується та частота, що має найменший рівень перешкод. Кількість робочих частот в ідеалі повинна забезпечувати діапазон перебудови, що не дозволяє створити заваду з небезпечною для станції спектральною щільністю. Тому за досвідом бойових дій, провівши аналіз з використання пристрою, можна зробити висновок, що в частотному діапазоні фіксованих частот повинно бути більше, або зондуючі частоти повинні змінюватися за випадковим законом. Також вартість виробу (від 40 000 євро); використання тільки одного вбудованого акустичного датчика за допомогою якого проводиться виявлення ударної хвилі в момент здійснення пострілу гармати, що значно збільшує час першого виміру, та велика похибка виміру; відсутність можливості вимірювання кутової швидкості обертання снаряда та враховування цих даних. Основне збурення, снаряд (чи куля) отримує при виході із ствола. Коли снаряд виходить із ствола услід за ним із ствола вириваються порохові гази, вони неорганізовано впливають на снаряд і, зокрема, розгортають його відносно його траєкторії. В результаті вісь снаряда випадково відхилена і має випадкову кутову швидкість. Наслідком цього у польоті на снаряд, навіть в абсолютно однорідній атмосфері, діятиме бічна сила, яка спрямована за випадковим законом, її дія під час руху до цілі проінтегрується, накопичиться і приведе до випадкового відхилення. Обертання снаряда призводить до того, що вектор бічної сили швидко обертається і вказаний інтеграл значно зменшується. Крім того при стрільбі на максимальну дальність, снаряд втрачає кутову швидкість обертання і, отже, і гіроскопічну стійкість. Тому з метою підвищення балістичних характеристик всі ці показники повинні бути враховані. Задачею корисної моделі є вимірювання початкової швидкості супроводжуваного снаряда в режимі перебудови частоти, від імпульсу до імпульсу за випадковим законом при зниженому відношенні сигнал-шум, та підвищення точності виміру балістичних характеристик снаряда за рахунок внесення правок відносно оберту снаряда навколо своєї осі в польоті. Поставлена задача вирішується тим, що: Радіолокаційна станція спостереження траєкторій балістичних об'єктів при використанні режиму перебудови частоти, від імпульсу до імпульсу за випадковим законом, яка містить акустичній датчик, який з'єднаний з формувачем імпульсів запуску синхронізації через підсилювач; дисплей, який з'єднаний з основним процесором, до якого під'єднані флеш-пам'ять, радіомодуль WIFI та артилерійський балістичній комп'ютер; передавальна антена, яка під'єднана до керованого високочастотного генератора через підсилювач, який з'єднаний з основним процесором, цифровим сигнальним процесором та фільтром низьких частот, до якого під'єднана приймальна антена; підсилювач низьких частот, який з'єднаний з фільтром низьких частот та вимірювачем частоти, пристрій GPS, магнітній компас, інфрачервоний датчик, вібраційний датчик, модуль вимірювання швидкості обертання снаряда, метеостанція, які підключені до цифрового сигнального процесора, згідно з корисною моделлю, відрізняється тим, що з метою підвищення балістичних характеристик пристрою додатково містить модуль вимірювання кутової швидкості обертання снаряда, тому що коли снаряд виходить зі ствола, услід за ним із ствола вириваються порохові гази, вони неорганізовано впливають на снаряд і зокрема розгортають його відносно його траєкторії. В результаті вісь снаряда випадково відхилена і має випадкову кутову швидкість. Обертання снаряда призводить до того, що вектор бічної сили швидко обертається і похибка вимірювань значно зменшується. Крім того при стрільбі на максимальну дальність, снаряд втрачає кутову швидкість обертання і, отже, і гіроскопічну стійкість. Також, згідно з корисною моделлю, пристрій додатково містить інфрачервоний датчик запуску, який спільно з акустичним датчиком формують імпульси запуску, що надходять на формувач імпульсів запуску та синхронізації, і замість високочастотного генератора з фіксованою частотою застосовано керований генератор високої частоти, який працює в режимі перебудови частоти, від імпульсу до імпульсу за випадковим законом, що полягає в тому, що кількість імпульсних сигналів, що формуються для випромінювання, вибирає рівною кількості N використовуваних частот випромінювання, а число N вибирають рівним 2k, де k - ціле число, що набуває значення від 6 до 8. Час Δt на 2 UA 122886 U 5 випромінювання пачки сигналів з перебудовою частоти вибирають не більше за інтервал кутової кореляції Тkk пов/(N-1). За допомогою станції радіолокації впродовж інтервалу часу Δt випромінюють пачку сигналів з перебудовою несучої частоти. При випромінюванні імпульсів з перебудовою частоти використовують випадковий закон зміни частоти, для чого в оперативному запам'ятовуючому пристрої формують і заздалегідь запам'ятовують послідовність величин частот, використовуваних в пачці від f0 до f0+Fпер з кроком Δf=Fпер /(N-1), де f0 основна частота випромінюваного сигналу. Розподіл номера частот випромінювання за випадковим законом, при якому час випромінювання t0 імпульсу на n- й частоті f0+nΔf ~ 10 15 20 25 30 35 40 45 50 55 60 ~ визначається за формулою tn =( n -1)Ti, де n - порядковий номер імпульсу на n- й частоті, що набуває значення від 1 до TV, що одного разу повторюється в межах пачки сигналів з перебудовою частоти. Суть корисної моделі пояснюється структурною схемою пристрою, яка представлена на Фіг. 1. На Фіг. 1 приведена структурна схема запропонованої радіолокаційної станції спостереження траєкторій балістичних об'єктів при використанні режиму перебудови частоти, від імпульсу до імпульсу за випадковим законом, де: - акустичний датчик 1, який з'єднаний з формувачем імпульсів запуску синхронізації 5 через підсилювач 2; - дисплей 3, який з'єднаний з основним процесором 19, до якого під'єднані флеш-пам'ять 24, радіомодуль WIFI 15 та артилерійський балістичній комп'ютер 10; - передавальна антена 7, яка під'єднана до керованого високочастотного генератора 9 через підсилювач 8, який з'єднаний з основним процесором 19, цифровим сигнальним процесором 18 та фільтром низьких частот 12, до якого під'єднана приймальна антена 11; - підсилювач низьких частот 13, який з'єднаний з фільтром низьких частот 12 та вимірювачем частоти 14, - пристрій GPS 16, магнітній компас 17, інфрачервоний датчик 22, вібраційний датчик 22, модуль вимірювання швидкості обертання снаряда 23, метеостанція 20, які підключені до цифрового сигнального процесора 18. Пристрій працює у такий спосіб. Радіолокаційна станція спостереження траєкторій балістичних об'єктів при використанні режиму перебудови частоти, від імпульсу до імпульсу за випадковим законом функціонує таким чином. На вибраній позиції здійснюється орієнтування станції за допомогою GPS навігатора 16 та магнітного компаса 17. На цифровий сигнальний процесор 18 надходять дані з метеостанції. Сигнал запуску від інфрачервоного датчика 21 та вібраційного датчика 22 формує імпульси синхронізації, які запускають керований високочастотний генератор 9. Керований високочастотний генератор 9 генерує коливання, які після посилення за допомогою підсилювача 8 до необхідної потужності надходять на випромінювач передавальної антени 7. Відбитий від снаряда електромагнітний сигнал, прийнятий приймальною антеною 11, надходить на фільтр низьких частот 12. На вхід фільтр низьких частот 12 надходить сигнал від керованого високочастотного генератора 9 з частотами, що генеруються. На виході підсилювача низьких частот 13 низькочастотні коливання допплерівського спектра після посилення надходять на вимірювач частоти 14. Ширина смуги підсилювача низьких частот (ПНЧ) 13 вибирається, виходячи з можливого діапазону допплерівських частот. При такому перетворенні частоти втрачається знак допплерівського зміщення, що несуттєво для балістичного вимірника швидкості снаряда. Вимірювач частоти 14 в кожному каналі вимірює середню частоту допплерівського спектра, а цифровий сигнальний процесор 18 обчислює початкову швидкість снаряда та кутову швидкість обертання снаряда, які потім реєструються дисплеєм 3, а також застосовуються як вхідні дані для артилерійського балістичного комп'ютера (АБК) 10. На виході допплерівського радіолокатора формується сигнал із спектром допплерівських частот, що залежить від швидкості руху снаряда. Цей сигнал надходить на вхід цифрового сигнального процесора 18 через формувач імпульсів запуску синхронізації 5, вихідна інформація якого зберігається на флеш - пам'яті 24. Під дією сигналів з виходу лічильника реалізацій флешпам'ять 24 видає сигнали на аналізатор достовірності реалізацій і після аналізу сигнали надходять на вхід формувача даних для обчислення початкової швидкості снаряда. Сигнали з виходу формувача даних для обчислення початкової швидкості надходять на вхід обчислювача, для визначення швидкості снаряда і на вхід блока обчислення ШПФ, з виходу якого через блок оцінки ширини спектра надходять на основний цифровий процесор 19, після чого на дисплей і одночасно через засоби сполучення на АБК 18. Для виміру середньої допплерівської частоти можна використати лічильник "нулів", тобто лічильник числа імпульсів, сформованих схемою обмеження і диференціювання, в точках перетину нульового рівня напругою на виході ПНЧ 13. 3 UA 122886 U 5 10 Дана РЛС відрізняється від відомих тим, що на формувач імпульсів запуску та синхронізації надходять сигнали запуску, які дублюють та доповнюють один одного від інфрачервоного датчика та акустичного датчика. Імпульс синхронізації з формувач імпульсів запуску та синхронізації запускає КВЧГ. Керований генератор високої частоти працює в режимі перебудови частоти, від імпульсу до імпульсу за випадковим законом, що полягає в тому, що кількість імпульсних сигналів, що формуються для випромінювання, вибирає рівною кількості N використовуваних частот випромінювання, а число N вибирають рівним 2k, де k - ціле число, що набуває значення від 6 до 8, та модуль вимірювання кутової швидкості обертання снаряда, який забезпечує найбільш високі точності обчислення балістичних характеристик снаряда. Перевагами застосування запропонованої радіолокаційної станції спостереження траєкторій балістичних об'єктів при використанні режиму перебудови частоти від імпульсу до імпульсу за випадковим законом є: виключає негативний вплив прицільних по частоті навмисних перешкод; - підвищується точність виміру балістичних характеристик снаряда (швидкість) до 20 відсотків. 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 1. Радіолокаційна станція спостереження траєкторій балістичних об'єктів при використанні режиму перебудови частоти від імпульсу до імпульсу за випадковим законом, яка містить акустичний датчик, який з'єднаний з формувачем імпульсів запуску синхронізації через підсилювач; дисплей, який з'єднаний з основним процесором, до якого під'єднані флеш-пам'ять, радіомодуль Wі-Fі та артилерійський балістичний комп'ютер; передавальна антена, яка під'єднана до керованого високочастотного генератора через підсилювач, який з'єднаний з основним процесором, цифровим сигнальним процесором та фільтром низьких частот, до якого під'єднана приймальна антена; підсилювач низьких частот, який з'єднаний з фільтром низьких частот та вимірювачем частоти, пристрій GPS, магнітний компас, інфрачервоний датчик, вібраційний датчик, модуль вимірювання швидкості обертання снаряда, метеостанція, які підключені до цифрового сигнального процесора, яка відрізняється тим, що з метою підвищення балістичних характеристик пристрою додатково містить модуль вимірювання кутової швидкості обертання снаряда. 2. Радіолокаційна станція за п. 1, яка відрізняється тим, що додатково містить інфрачервоний датчик запуску, який спільно з акустичним датчиком формують імпульси запуску, що надходять на формувач імпульсів запуску та синхронізації. 3. Радіолокаційна станція за п. 1, яка відрізняється тим, що як високочастотний генератор з фіксованою частотою використовується керований генератор високої частоти, який працює в режимі перебудови частоти, від імпульсу до імпульсу за випадковим законом, що полягає в тому, що кількість імпульсних сигналів, що формуються для випромінювання, вибирає рівною кількості N використовуваних частот випромінювання, а число N вибирають рівним 2k, де k ціле число, що набуває значення від 6 до 8. 4 UA 122886 U Комп’ютерна верстка А. Крижанівський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F41G 3/08
Мітки: імпульсу, використанні, спостереження, об'єктів, законом, траєкторій, перебудови, станція, частоти, балістичних, радіолокаційна, режиму, випадковим
Код посилання
<a href="https://ua.patents.su/7-122886-radiolokacijjna-stanciya-sposterezhennya-traehktorijj-balistichnikh-obehktiv-pri-vikoristanni-rezhimu-perebudovi-chastoti-vid-impulsu-do-impulsu-za-vipadkovim-zakonom.html" target="_blank" rel="follow" title="База патентів України">Радіолокаційна станція спостереження траєкторій балістичних об’єктів при використанні режиму перебудови частоти від імпульсу до імпульсу за випадковим законом</a>
Магнетронний генератор з перестройкою частоти від імпульсу до імпульсу
Номер патенту: 98574
Опубліковано: 25.05.2012
Автори: Сивоконь Костянтин Васильович, Чурюмов Геннадій Іванович, Екезлі Андрій Ігорович
МПК: H01J 25/00
Мітки: магнетронний, імпульсу, перестройкою, генератор, частоти
Формула / Реферат:
Магнетронний генератор з перестройкою частоти від імпульсу до імпульсу, що містить катод, анод, розділений на сегменти подовжніми щілинами, які входять до складу порожнистих резонаторів, вивід НВЧ енергії і додатково один або більше виводів енергії, джерело живлення, анодна напруга якого прикладена між катодом і анодом, який відрізняється тим, що введені зовнішнє навантаження, сполучене з головним активним виводом НВЧ енергії і одне або...
Радіолокаційна станція комплексної системи захисту корабля
Номер патенту: 83795
Опубліковано: 25.09.2013
Автори: Гузь Володимир Іванович, Ліпатов Валерій Павлович, Стецюк Володимир Леонтійович, Долеско Анатолій Олександрович, Піронер Ян Михайлович
МПК: G01S 13/04
Мітки: радіолокаційна, корабля, захисту, комплексної, системі, станція
Формула / Реферат:
Радіолокаційна станція комплексної системи захисту корабля, що містить антенний пост з антеною, пульт оператора та розподільний щит, при цьому до складу антенного поста входять антенна система, передавач, надвисокочастотний приймач, підсилювач проміжної частоти та модуль процесорів, до складу пульта оператора входять панельний комп'ютер пульта оператора, що містить з'єднані між собою монітор пульта оператора РЛС та процесор керування і...
Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об’єктів
Номер патенту: 8961
Опубліковано: 15.08.2005
Автори: Толстіхін Микола Вікторович, Єна Григорій Олександрович, Шовгун Віталій Андрійович, Білановський Михайло Миколайович, Біличенко Іван Федорович, Ліпатов Валерій Павлович, Андрусенко Микола Іванович
Мітки: пасивна, координат, носіїв, вимірювання, надводних, випромінюючих, радіолокаційна, повітряних, станція, об'єктів
Формула / Реферат:
1. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого...
Послідовності стрибкоподібної перебудови частоти для багатосмугових систем зв’язку
Номер патенту: 85839
Опубліковано: 10.03.2009
Автор: Маріч Светіслав
МПК: H04B 1/69, H04J 11/00
Мітки: частоти, послідовності, систем, зв'язку, перебудови, багатосмугових, стрибкоподібної
Формула / Реферат:
1. Спосіб одержання послідовності стрибкоподібної перестройки частоти (СПЧ), що включає етапи, на якиходержують першу послідовність елементів для виразу 1/k, де k - індекс для елементів в першій послідовності,одержують другу послідовність елементів для виразу logα 1/k на основі першої послідовності, при цьому вирази 1/k і logα 1/k оцінюють за допомогою операції по модулю р, де р - просте число, а α - первісний...
Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об’єктів
Номер патенту: 78129
Опубліковано: 15.02.2007
Автори: Ліпатов Валерій Павлович, Андрусенко Микола Іванович, Толстіхін Микола Вікторович, Єна Григорій Олександрович, Біличенко Іван Федорович, Білановський Михайло Миколайович, Шовгун Віталій Андрійович
Мітки: повітряних, носіїв, радіолокаційна, об'єктів, випромінюючих, координат, вимірювання, станція, надводних, пасивна
Формула / Реферат:
1. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого...
Наступний патент: Портативний перекладач-3
Випадковий патент: Пристрій для контролю ресурсу комутаційних апаратів