Магнітопружний диференційний датчик тиску
Номер патенту: 17717
Опубліковано: 20.05.1997
Автори: Гуманюк Мстислав Несторович, Варавва Ігор Георгійович
Формула / Реферат
Магнитоупругий дифференциальный датчик давления, содержащий полый корпус, в торцах которого установлены мембраны с жесткими центрами и крышки со штуцерами, размещенные в корпусе силовоспринимающий элемент, магнитоупругий преобразователь, намагничивающие и измерительные обмотки, отличающийся тем, что магнитоупругий преобразователь выполнен в виде полого усеченного конуса с пазами на боковой поверхности, между которыми расположены стержни по образующим конуса с двумя диаметрально расположенными измерительными обмотками, преобразователь закреплен на боковой поверхности корпуса перпендикулярно eго продольной оси с помощью подпружиненного резьбового элемента, проходящего через внутреннюю полость преобразователя, второй конец резьбового элемента соединен с пятой, силовоспринимающий элемент выполнен в виде штоков, установленных соосно продольной оси корпуса с возможностью взаимодействия с жесткими центрами мембран и пятой, при этом под жестким центром каждой мембраны внутри корпуса со стороны, противоположной подводящему штуцеру, размещена с зазором жесткая шайба, а измерительные и намагничивающие обмотки размещены во взаимно перпендикулярных плоскостях, причем измерительные обмотки расположены в плоскости, совпадающей с продольной осью корпуса.
Текст
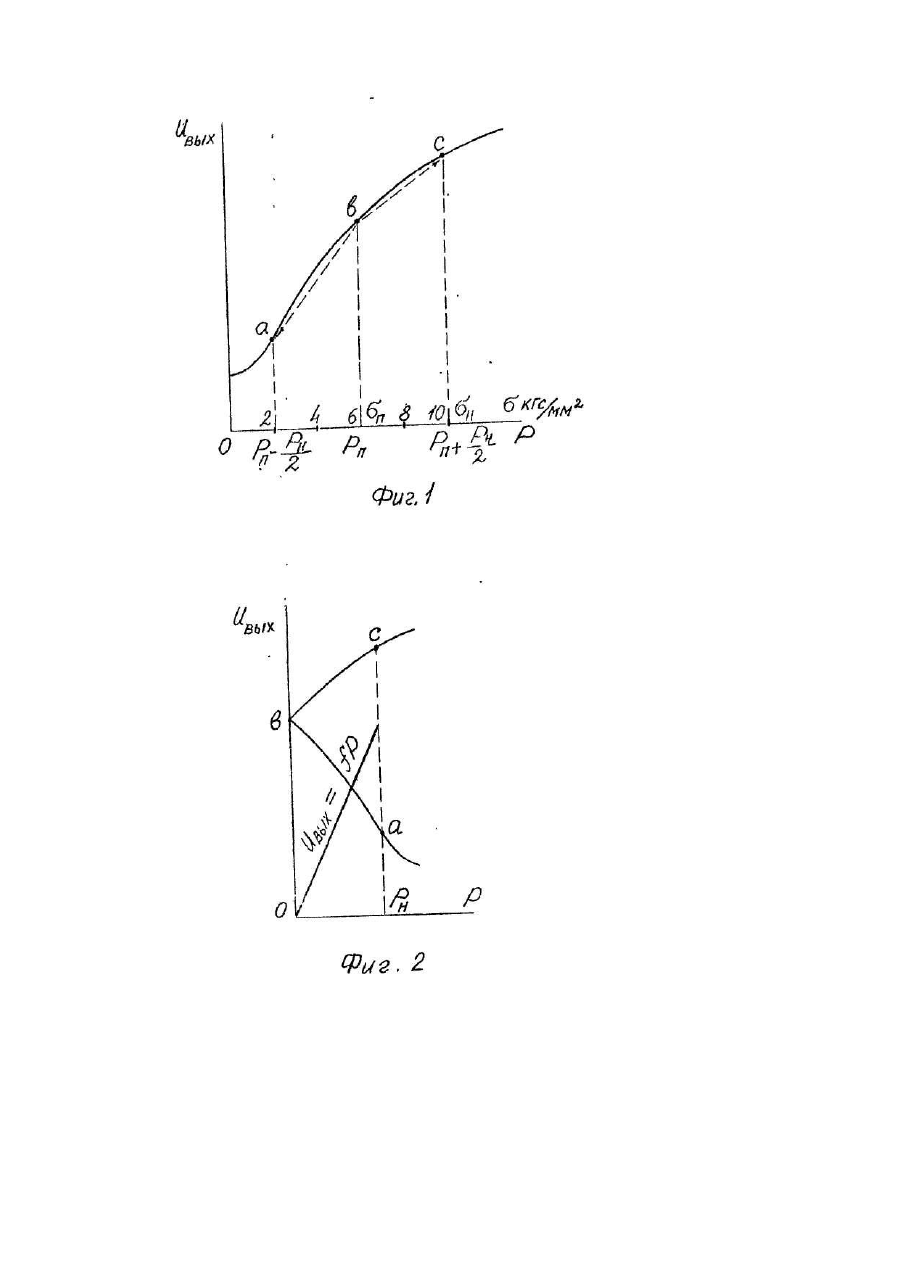
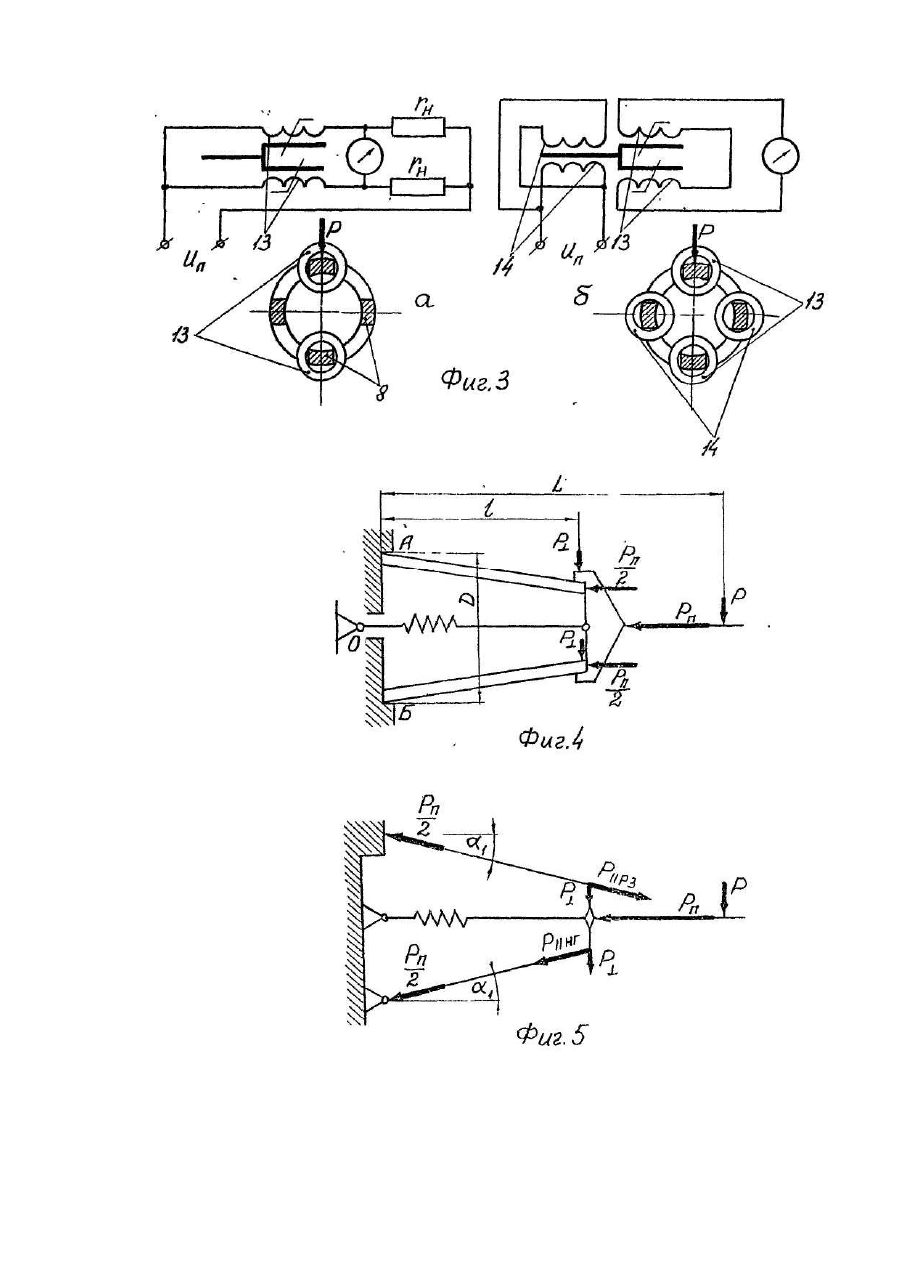
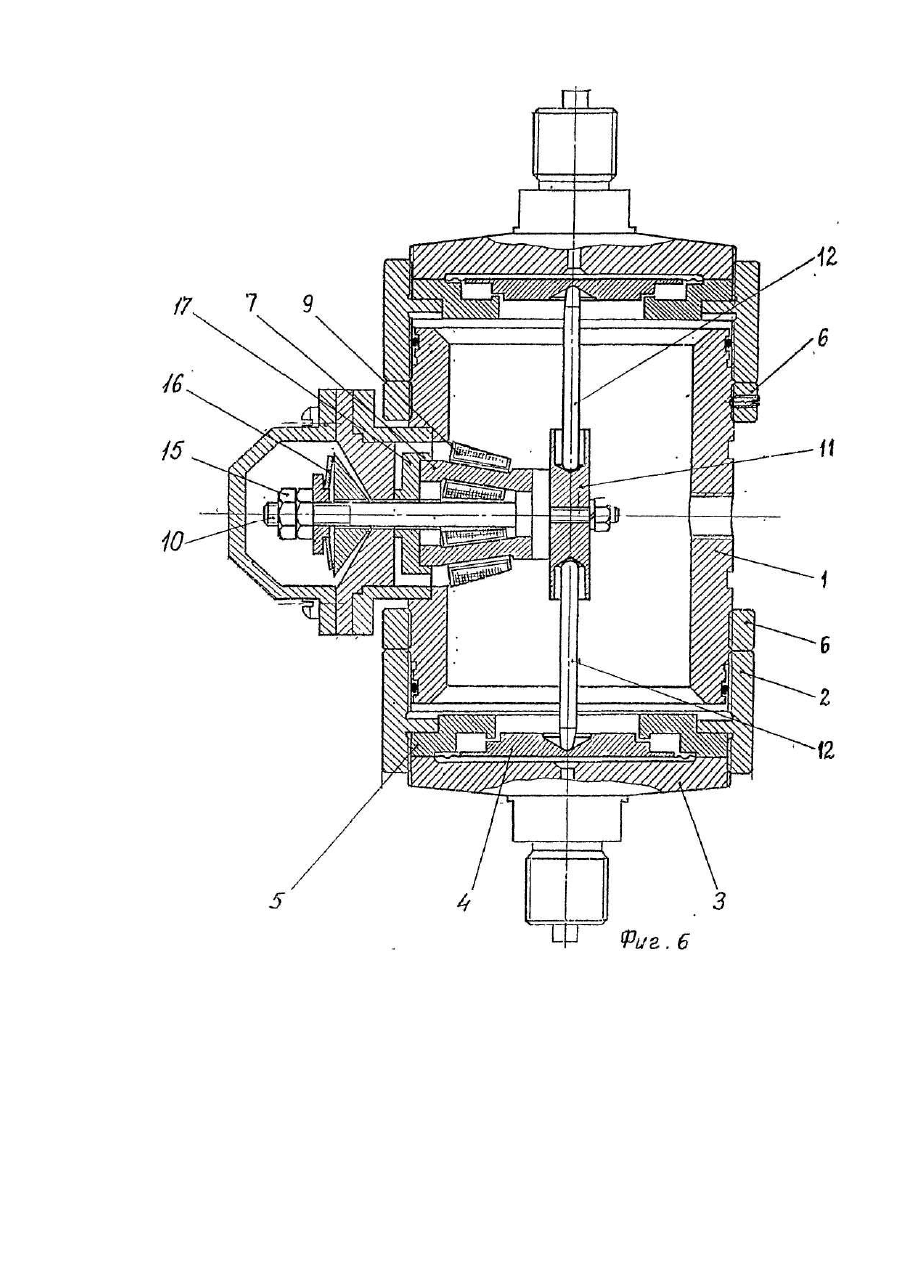
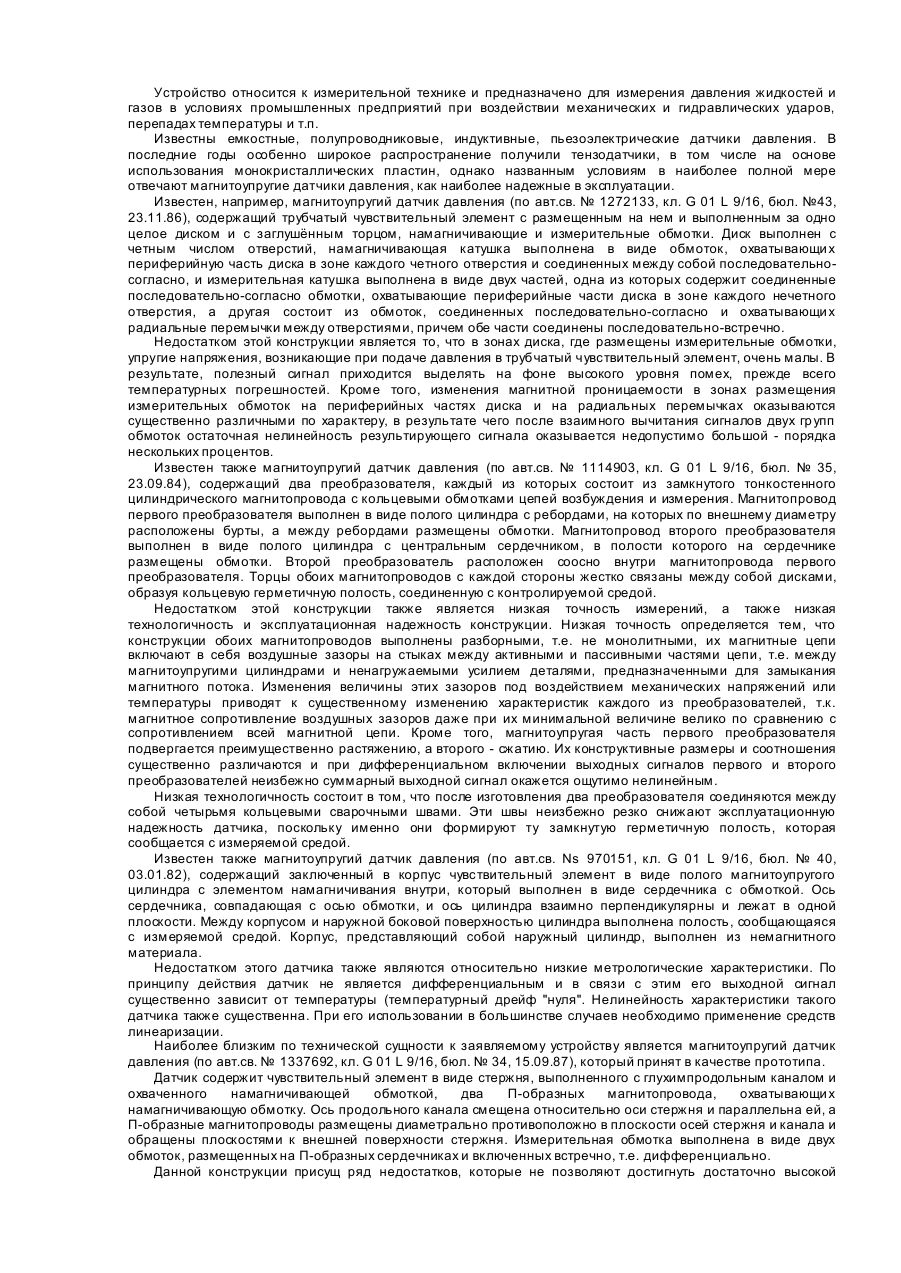
Изобретение относится к области приборостроения и может быть применено в энергетике для измерения разности давлений и, в частности, малых перепадов давлений в случае, когда рабочее давление в системе в десятки раз превышает величину перепада, что оказывается необходимым при измерении расходов жидкостей и газов. Известен магнитоупругий датчик разности давлений (по авт. св. № 827987, кл. G01L13/00, бюл. № 17,07.05.81), который содержит сплошной магнитолровод, выполненный в виде бруса, продольные цилиндрические внутренние камеры, соединенные с источниками внешних давлений, измерительные и намагничивающую обмотки. Внутренние камеры расположены симметрично по обе стороны оси симметрии бруса и о хвачены измерительной обмоткой, пропущенной через выполненные в брусе о тверстия, оси которых перпендикулярны оси бруса. Это устройство имеет низкую точность измерений, что объясняется следующими причинами. Из данных экспериментальных исследований известно (например, Гуманюк М.Н, Магнито упругие датчики в автоматике. - Киев, "Техніка", 1972, рис. 14-27), что магнито-упругая чувствительность монолитных материалов характеризуется сложной зависимостью от величины упругих напряжений, предварительной термообработки, магнитной обработки и т.п. Наличие внутренних напряжений в материале обуславливает наличие начальной зоны (от 0 до 1-2 кгс/мм в зависимости от глубины отжига), в которой чувствительность постепенно возрастает. После 2-3 кгс/мм 2 она начинает постепенно снижаться. При подаче давления в продольные цилиндрические камеры, в материале бруса вокруг них возникают напряжения растяжения. Когда давления равны, равны и напряжения, а следовательно и уровни сигналов на измерительных обмотках равны. Их разность близка к нулю. Когда же давления оказываются различными, то происходит вычитание одной нелинейной зависимости из другой, причем они по величине и характеру существенно отличаются. Погрешность нелинейности выходного сигнала оказывается недопустимо большой, достигая значений от одного до нескольких процентов. Кроме того, этот датчик не может обеспечить измерение разности давлений, составляющей 1-2% от допустимого рабочего давления с приемлемо малой относительной погрешностью, поскольку его погрешности соизмеримы с этим диапазоном. Известен также магнитоупругий датчик (по авт. св. № 1111041, кл. G 01 L9/16, бюл. № 32,30.08.84), содержащий два преобразователя с питающими и двумя измерительными обмотками, каждый из которых выполнен в виде чувствительного элемента с защитной оболочкой из немагнитного материала, при этом питающая и измерительные обмотки охватывают защитные оболочки, а измерительные обмотки включены встречно, и каждый чувствительный элемент выполнен в виде полого цилиндра, а защитная оболочка - в виде двух колец, установленных герметично с зазором относительно полого цилиндра. Таким образом, в каждом из двух преобразователей есть по две камеры, соединяемые посредством штуцера с зонами, в которых создано некоторое давление. Первая камера расположена между наружным защитным кольцом и магнитоупругим цилиндром. При подаче давления в эту камеру магнитопровод испытывает сжатие в радиальном направлении, Вторая камера, также кольцевая, образована внутренним защитным кольцом и магнитопроводом. При подаче давления в эту камеру магнитопровод испытывает растяжение в радиальном направлении. Оба преобразователя работают одновременно, причем давление из первой зоны поступает в наружную камеру первого преобразователя, а из второй зоны - во внутреннюю камеру первого преобразователя. Основным недостатком этого датчика является существенная нелинейность выходного сигнала, особенно при малых разностях давлений, на начальном участке характеристики. Причины этого обстоятельства те же, что и в предыдущем случае - чем меньше давление, тем меньше чувствительность датчика, причем дифференциальное включение двух преобразователей, в которых разность давлений действует на магнитопроводы в противоположных направлениях, существенно не меняет положения. Опять имеем случай суммирования двух нелинейных зависимостей, в результате чего погрешность нелинейности датчика составляет от 1 до 3% и более. Кроме того, конструкция датчика не предусматривает возможности измерения малых разностей давлений при рабочих давлениях в десятки раз превышающих эту •разность. Отсутствие защиты от больших рабочих давлений вынуждает измерять малые разности давлений теми же средствами, которые сохраняют работоспособность при больших давлениях, то есть грубыми, что неизбежно ведет к большим погрешностям измерений и делает известный датчик неприменимым для решения поставленной задачи. Наиболее близким по технической сущности к заявляемому устройству является дифференциальный датчик давления (по авт. св. № 1413454, кл. G 01 L 9/16, бюл. № 28, 30.07.88), принятый в качестве прототипа. Указанный дифференциальный датчик давления содержит полый цилиндрический корпус с внутренним кольцевым буртом в средней части, в торцах корпуса установлены мембраны с жесткими центрами, между мембранами и кольцевым буртом размещены соосно корпусу два магнитоупругих преобразователя с чувствительными магнитопроводами в виде полых цилиндров, причем магнитопровод одного преобразователя размещен без осевого зазора между жестким центром одной мембраны и кольцевым буртом, причем он снабжен выполненным из немагнитного материала силопередающим штоком, соединяющим центры двух мембран и размещенным с радиальным зазором внутри магнитопровода преобразователей, причем магнитопровод второго преобразователя установлен с осевым зазором между кольцевым буртом и второй мембраной. Усилие, пропорциональное разности двух давлений (причем, при условии, что давление на одну определенную мембрану всегда больше, чем на другую) шток передает на рабочий магнитоупругий преобразователь, который упирается в кольцевой бурт, имеющийся внутри корпуса. Второй магнитоупругий преобразователь усилия не воспринимает и служит исключительно в роли компенсирующего н улевой выходной сигнал рабочего преобразователя и аддитивной составляющей его температурной погрешности. Следовательно, этому датчику также присущ ряд недостатков, таких как пониженная чувстви тельность на начальном участке выходной характеристики, отсутствие защищенности от рабочего давления, которое в десятки раз превышает нужный диапазон измерения разности давлений и связанное с этим неизбежное загрубление преобразователя. В связи с этими недостатками дифференциальный датчик давления прототип не обеспечивает решения поставленной задачи. Изобретение решает задачу усовершенствования датчика разности давлений за счет повышения чувствительности и уменьшения нелинейности при одновременной защищенности датчика от одностороннего и двустороннего рабочего давления. Непосредственный технический результат, который обеспечивает изобретение, состоит в том, что чувствительный элемент имеет большую жесткость при воздействии на него усилий, лежащих в пределах его номинального диапазона измерений, а при выходе усилия за эти пределы жесткость чувствительного элемента быстро уменьшается, что обеспечивает возможность восприятия избыточного усилия, возникшего на мембране с жестким центром, жесткой шайбой, защищающей чувствительный элемент от перегрузки. Кроме того, обеспечивается линеаризация выходной характеристики за счет того, что стержни чувствительного элемента с измерительными обмотками в исходном состоянии нагружены усилиями предварительного нагружения, имеющими равные значения, которые при воздействии измеряемого усилия складываются с ним, изменяя суммарное усилие в противоположных направлениях - на одном из стержней усилие возрастает, а на другом убывает. Ди фференциальное включение обмоток, расположенных на этих стержнях, обеспечивает линейность результирующего сигнала. Указанный технический результат достигается тем, что в дифференциальном датчике давления, содержащем полый корпус, в торцах которого установлены мембраны с жесткими центрами и крышки со штуцерами, размещенные в корпусе силовоспринимающий элемент, магнитоупругий преобразователь, намагничивающие и измерительные обмотки, согласно изобретению, магнитоупругий преобразователь выполнен в виде полого усеченного конуса с пазами на боковой поверхности, между которыми расположены стержни по образующим конуса с двумя диаметрально размещенными измерительными обмотками, преобразователь закреплен на боковой поверхности корпуса перпендикулярно его продольной оси с помощью подпружиненного резьбового элемента, проходящего через внутренюю полость преобразователя, второй конец резьбового элемента соединен с пятой, силовоспринимающий элемент выполнен в виде двух штоков, установленных соосно продольной оси корпуса с возможностью взаимодействия с жесткими центрами мембран и пятой, при этом под жестким центром каждой мембраны внутри корпуса со стороны, противоположной подводящему штуцер у, размещена с зазором жесткая шайба, а намагничивающие и измерительные обмотки размещены во взаимно перпендикулярных плоскостях, причем измерительные обмотки расположены в плоскости, совпадающей с продольной осью корпуса. Выполнение магнитоупругого преобразователя в виде полого усеченного конуса с пазами на боковой поверхности, между которыми расположены стержни по образующим конуса, позволяет создать в магнитопроводе контуры с совершенно идентичными условиями при отсутствии воздушных зазоров или други х условий нестабильности для магнитного потока. Диаметрально расположенные на стержнях две измерительные обмотки позволяют создать две электрические цепи, посредством которых может быть реализован дифференциальный принцип измерений. То, что преобразователь закреплен на боковой поверхности корпуса перпендикулярно его продольной оси с помощью подпружиненного резьбового элемента, проходящего через внутреннюю полость преобразователя, а второй конец резьбового элемента соединен с пятой, позволяет посредством завинчивания гайки нагрузить стержни магнитопровода сжимающим усилием нужного значения. Использование пружины позволяет обеспечить стабильность усилия предварительного нагружения. То, что силовоспринимающий элемент выполнен в виде двух штоков, установленных соосно продольной оси корпуса с возможностью взаимодействия с жесткими центрами мембран и пятой, позволяет передать усилие от мембран на свободный конец магнито-упругого преобразователя вдоль оси корпуса, то есть перпендикулярно оси преобразователя. Установка под жесткими центрами мембран внутри корпуса со стороны, противоположной штуцеру жестких шайб с зазором позволяет ограничить прогиб мембран и перемещение свободного конца магнитоупругого преобразователя допустимыми пределами. Расположение стержней преобразователя с измерительными обмотками в плоскости, совпадающей с продольной осью корпуса, создает условие, когда измеряемое усилие, воздействующее на преобразователь, вызывает в этих стержнях изменения сжимающих напряжений различных знаков - со стороны действия усилия сжатие уменьшается, а с противоположной стороны увеличивается. Реализация этих зависимостей обеспечивает выполнение поставленных задач следующим образом. Из опыта экспериментальных исследований известно, что чувстви тельность магнитоупругих материалов к упругим напряжениям является нелинейной функцией и зависит от ряда факторов - наличия магнитной текстуры, вн утренних напряжений, связанных с глубиной термообработки, предварительной магнитной обработки и т.п. (Вонсовский СВ. Влияние слабых упруги х напряжений на начальную обратимую ' восприимчивость ферромагнетиков./Журнал экспериментальной и теоретической физики, - Т. 17. - 1947. Вып. 12. - С. 1094-1105; Гуманюк М.Н. Магнито упругие датчики в автоматике. Киев, "Техніка", 1972, рис. 1427). Нелинейность, как правило, характеризуется наличием начального участка (от 0 до 1-3 кг/мм 2 в зависимости от глубины отжига) пониженной чувствительности, которая постепенно возрастает, и после дости-жения максимума при 2-4 кгс/мм , постепенно убывает. Причем эта нелинейность с достаточно высокой степенью приближения описывается квадратным уравнением (фиг. 1). Линеаризация такой зависимости осуществляется магнитоупругим преобразователем предложенной конструкции следующим образом. Путем затягивания гайки, в стержнях магнитопровода создаются упругие напряжения, соответствующие точке "b" на фиг. 1. При воздействии внешнего усилия на пяту, магнитопровод стремится опрокинуться относительно гнезда, к которому прижато его основание. При этом для одного стержня с измерительной обмоткой напряжение уменьшается, т.е. на характеристике фиг. 1 их отразит точка "а", а для другого возрастает, чему соответствует точка "с". Усилие предварительного нагружения Рп выбирается таким, при котором напряжения в стержнях в нормальном рабочем режиме не бывают меньше некоторого значения, обозначенного на фиг. 1 точкой "а", то есть они не выходят в зону, где характер нелинейности изменяется. Встречное включение измерительных обмоток обеспечивает взаимное вычитание двух сигналов, при котором происходит взаимная компенсация нелинейностей сигналов обеих обмоток. Этот процесс показан на фиг. 2. Он может быть описан также таким образом. Примем дроссельный вариант включения преобразователя в соответствии с фи г. 3, а, когда обе измерительные обмотки через небольшие - нагрузочные резисторы rн подключены к источнику стабильного напряжения питания Un и характеризуются одинаковой исходноепроводимостью Uн (при Ρ = 0). Тогда зависимость тока іНг в обмотке нагружаемого стержня от измеряемого усилия можно записать в таком виде: Соответственно, ток Iрз в обмотке разгружаемого стержня Здесь А - "н улевой" ток (при Ρ = 0), S - чувствительность стержня преобразователя; Рп - усилие предварительного нагружения стержня; Ρ - измеряемое усилие; С - коэффициент при квадратичном слагаемом, определяющем нелинейность рабочей части характеристики. Разность напряжений, возникающих при прохождении токов Iнг и Iрз через резисторы равного сопротивления Величины U, Υ, г, S, С и Ρ постоянны, то есть выходной сигнал пропорционален только измеряемому усилию Р. Поставленную задачу линеаризации выходной характеристики предложенное устройство выполняет. Практически достигнутые значения остаточной нелинейности составляют 0,1-0,3% и менее: Распределение усилий в преобразователе можно видеть на фиг. 4, 5. Усилие предварительного нагружения Рп, создаваемое завинчиванием гайки, распределяется между стержнями с измерительными обмотками (другие два стержня с гнездом не контактируют), т.е. на каждый стержень воздействует усилие Рп/2. Измеряемое усилие Ρ приложено к углублению пяты и также распределяется между двумя стержнями, на каждый из которых воздействуе т усилие где L - расстояние от гнезда до углубления в пяте; I - расстояние от гнезда до торца магнитопровода. Составляющая Ρ^, воздействующая на верхний, разгружаемый стержень, стремится повернуть преобразователь вокруг нижней опорной точки Б, создавая составляющую Рцр3, направленную встречно усилию предварительного нагружения Рп/2: где D - диаметр основания магнитопровода. Аналогично составляющая Ρ χ, приложенная к нижнему, нагружаемому стержню, стремится повернуть преобразователь вокруг верхнней опорной точки А, создавая составляющую Ринг, направленную в ту же сторону, что и составляющая Рп/2: Как можно видеть, составляющие Ріірз и Ріінг прямо пропорциональны отношению расстояния L от гнезда до точки приложения усилия к диаметру D основания ма-нитопровода. Это обстоятельство позволяет существенно повысить чувствительность преобразователя, поскольку при D = 20 мм длина L = 30-40 мм является вполне конструктивной, задачу повышения чувствительности устройство реализует. Однако, по сравнению с прототипом, повышение чувствительности достигается, главным образом, за счет того, что чувствительный элемент используется только в диапазоне измеряемого усилия и защищен от избыточного усилия, возникающего под действием рабочего давления в трубопроводе. Защита датчика разности давлений от перегрузки односторонним высоким давлением обеспечивается за счет того, что пока измеряемое преобразователем усилие Ρ не выходит за пределы рабочего диапазона, перемещение точки приложения усилия к пяте не превышает значений порядка 0-20-30 мкм. По мере приближения разности Рп/2 -Ріірз к нулю деформация быстро возрастает, достигая величины 200-400 мкм и более. При дальнейшем возрастании усилия Ρ стержень, расположенный со стороны действия усилия отрывается от своей опоры, Практически в предложенном устройстве этот отрыв не происходит, поскольку в корпусе датчика под жесткими центрами мембран установлены жесткие шайбы. Зазор между ними составляет около 100 мкм, и усилие, превышающее рабочий диапазон разности давлений на 20-40%, воспринимается жесткой шайбой, полностью защищающей датчик от опасных перегрузок. Таким образом датчик, предназначенный для измерения перепада давления в диапазоне 0-25 КПа и эффективном диаметре мембраны 60 мм испытывает силовые нагрузки на магнитоупругий преобразователь в пределах 0-6,75 кгс и обеспечивает защиту при давлении в трубопроводе 1,6 МПа от усилий порядка 430 кгс. На фиг. 1 показан типичный вид характеристики магнитоупругого преобразователя; на фиг. 2 графическое представление линеаризации выходной характеристики преобразователя; на фиг. 3 электрическая схема магнитоупругого ди фференциального датчика давления; а -дроссельный вариант, 6 трансформаторный; на фиг. 4 - схематическое изображение магнитоупругого сило-измерителя; на фиг. 5 диаграмма разложения сил; на фиг. 6 - конструкция магнитоупругого ди фференциального датчика давления. Магнито упругий дифференциальный датчик давления, показанный на фиг. 6, содержит полый корпус 1, на торцы которого навинчены крышки 2 со штуцерами 3, содержащие в себе мембрану 4 с жестким центром и жесткую шайбу 5, Крышки на корпусе фиксируются стопорными кольцами 6. Магнито упругий преобразователь 7 выполнен в виде полого усеченного конуса с пазами на боковой поверхности, между которыми расположены четыре стержня 8 (фиг. 3) по образующим конуса. На них размещены катушки с обмотками 9. Преобразователь 7 закреплен на боковой поверхности корпуса 1 перпендикулярно его продольной оси с помощью подпружиненного резьбового элемента 10 (шпилька, болт), проходящего через внутреннюю полость преобразователя. Второй конец резьбового элемента соединен с пятой 11. Силовоспринимающий элемент выполнен в виде двух штоков 12, установленных соосно продольной оси корпуса с возможностью взаимодействия с жесткими центрами мембран 4 и пятой 11. Под жестким центром каждой мембраны внутри корпуса со стороны, противоположной подводящему штуцеру 3, размещена с зазором жесткая шайба 5. Измерительные обмотки 13 и намагничивающие 14 (фиг. 3) размещены во взаимно перпендикулярных плоскостях, причем измерительные обмотки расположены в плоскости, совпадающей с продольной осью корпуса. Для создания усилия предварительного нагружения чувствительного элемента предназначена гайка 15. а для подпружинивания чувствительного элемента тарельчатая пружина 16. Для закрепления преобразователя 7 на боковой поверхности корпуса 1 используется гнездо 17. Устройство работает следующим образом. Давления двух контролируемых сред подводятся к штуцерам 3. Попадая в надмембранное пространство, контролируемая среда создает усилие, стремящееся вытолкнуть мембрану 4. То т же процесс происходит и на второй мембране с жестким центром. При равенстве давлений и усилия оказываются равными. От жестких центров мембраны они через штоки 12 воздействуют на пяту 11 и взаимно нейтрализуются. Выходной сигнал преобразователя остается неизменным, соответствующим "нулю". Когда давления не равны, но их разность находится в пределах диапазона измерений, усилие, пропорциональное разности давлений воздействуе т на магнитоупругий преобразователь, стремясь через шток 12 и пяту 11 отклонить его от нейтрального положения. При подготовке датчика к работе, путем навинчивания гайки 15 на шпильку 10, магнитопровод преобразователя 7 был прижат к боковой поверхности корпуса 1 с заданным усилием, несколько превышающим половину усилия, создаваемого мембраной при давлении, соответствующем верхней точке диапазона измерений. Воздействие измеряемого усилия на преобразователь (при преобладании, например, "верхнего" усилия) вызывает уменьшение сжатия "верхнего" стержня и увеличение сжатия "нижнего". Сопротивление переменному току "верхней" обмотки возрастает, т.к. магнитная проницаемость ее стержня возрастает, а сопротивление "нижней" обмотки при этом уменьшается. Соответственно изменяются токи в обмотках, возникает сигнал (фиг. 3), пропорциональный разности давлений, причем, как изложено выше, с минимальной погрешностью нелинейности. При изменении знака разности давлений происходят те же процессы, но уже с изменениями знака выходного сигнала, для чего сигналы обеих катушек предварительно выпрямляются, что на схеме фиг. 3 не показано. В случае, когда разность давлений многократно превышает диапазон измерений, большее усилие стремится опрокинуть преобразователь 7, повернув его относительно гнезда 17. Это не вызывает повреждения магнитопровода, поскольку он относительно жесток, пока не превышено усилие предварительного нагружения Рп. После превышения этого значения, отклонение магнитопровода на единицу усилия быстро возрастает без его повреждений. Однако это отклонение сразу же ограничивается за счет того, что жесткий центр мембраны 4 ложится на жесткую шайбу 5. Дальнейший рост усилия воспринимается датчиком без повреждений. В случае же, когда действует нормальное рабочее давление, в десятки раз превышающее диапазон измерений разности давлений, близкие друг другу усилия воспринимаются жесткими центрами мембран 4, штоками 12 и пятой 11 и нейтрализуются без ущерба для датчика.
ДивитисяДодаткова інформація
Назва патенту англійськоюMagnetic-elastic differential pressure gauge
Автори англійськоюVaravva Ihor Heorhiiovych
Назва патенту російськоюМагнитоупругий дифференциальный датчик давления
Автори російськоюВаравва Игорь Георгиевич
МПК / Мітки
МПК: G01L 9/16
Мітки: тиску, датчик, диференційний, магнітопружний
Код посилання
<a href="https://ua.patents.su/7-17717-magnitopruzhnijj-diferencijjnijj-datchik-tisku.html" target="_blank" rel="follow" title="База патентів України">Магнітопружний диференційний датчик тиску</a>
Магнітопружний датчик тиску
Номер патенту: 17718
Опубліковано: 20.05.1997
Автори: Варавва Ігор Георгійович, Гуманюк Мстислав Несторович
МПК: G01L 9/16, G01B 13/00
Мітки: датчик, магнітопружний, тиску
Формула / Реферат:
Магнитоупругий датчик давления, содержащий магнитоупругий чувствительный элемент и две группы измерительных обмоток, включенных встречно, отличающийся тем, что в него введен второй магнитоупругий чувствительный элемент, причем оба чувствительных элемента выполнены идентично в виде обращенных друг к другу большими основаниями полых усеченных конусов с прорезями на боковой поверхности и лежащими между ними по образующим конуса спице ми, на...
Дискретний датчик тиску
Номер патенту: 1679
Опубліковано: 25.10.1994
Автори: Танітовський Віталій Миколайович, Блудов Вячеслав Михайлович
МПК: G01L 19/00, G01L 9/14
Мітки: дискретний, датчик, тиску
Формула / Реферат:
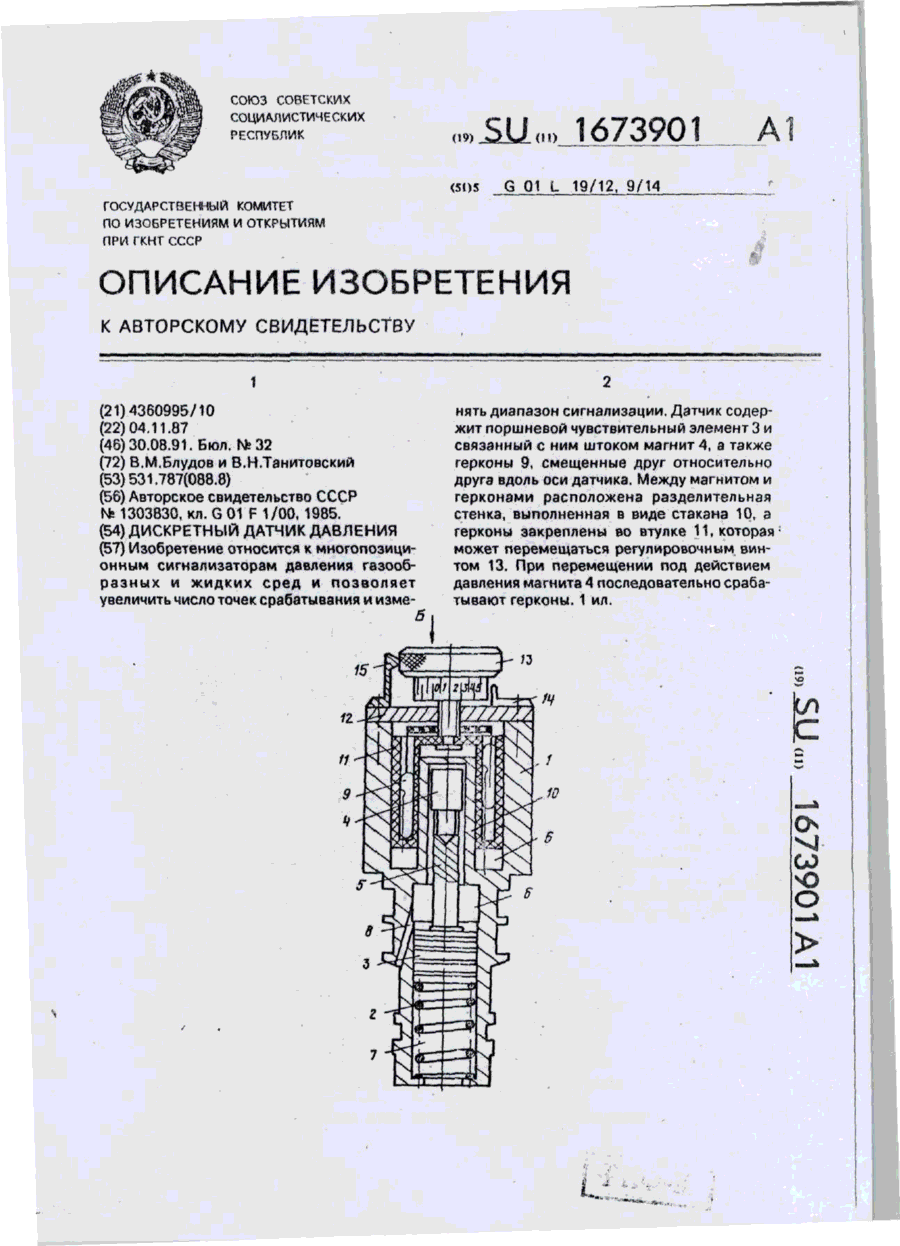
Дискретный датчик давлення, содержащий цилиндрический корпус с каналами для подвода давлення и крышкой, внутри которого размещен чувствительный элемент и узел сигнализации, выполненный в виде магнита, связанного штоком с чувствительным элементом, герконов, установленных со смещением относительно друг друга вдоль оси корпуса, при этом между магнитом и герконами расположена разделительная стенка, отличающийся тем, что, с целью увеличения...
Датчик тиску сипучих матеріалів
Номер патенту: 11882
Опубліковано: 25.12.1996
Автор: Жданов Олександр Олександрович
МПК: B07B 15/00, G01L 7/00
Мітки: датчик, матеріалів, сипучих, тиску
Формула / Реферат:
Датчик давления сыпучих материалов, содержащий корпус, установленные в нем воспринимающую площадку, упругий элемент н измеритель перемещений, отличающийся тем, что, с целью повышения точности измерений за счет обеспечения возможности плавного регулирования чувствительности датчика, он снабжен кольцевым прижимом и крышкой, при этом кольцевой прижим размещен между воспринимающей площадкой и крышкой, а упругий элемент выполнен в виде кольца...
Диференційний індуктивний датчик переміщень
Номер патенту: 4143
Опубліковано: 27.12.1994
Автор: Нікітін Борис Михайлович
МПК: G01B 7/00
Мітки: переміщень, датчик, диференційний, індуктивний
Формула / Реферат:
Дифференциальный индуктивный датчик перемещений, содержащий якорь, охватывающий его сердечник и измерительный элемент, отличающийся тем, что, с целью повышения точности, якорь выполнен в виде прямоугольного диэлектрического бруса, разделенного по диагонали прямоугольным магнитопроводом, измерительный элемент выполнен в виде двух одинаковых одно-слойных индукторных катушек, размещенных в каркасах, каркасы установлены на противолежащих...
Датчик тиску
Номер патенту: 12848
Опубліковано: 28.02.1997
Автори: Дергачов Володимир Андрійович, Мощицький Сергій Семенович, Кошовий Микола Дмитрович, Ткаченко Володимир Антонович
МПК: G01L 9/00
Формула / Реферат:
(57) Датчик давления, содержащий упругий чувствительный элемент, расположенный в герметичном корпусе и шарнирно соединенный с кривошипно-шатунным механизмом, связанным с зубчатым сектором, установленную в опорах зубчатую рейку, входящую в зацепление с зубчатым сектором, к одному концу которой перпендикулярно присоединена пластина со стержневыми сердечниками разной длины, соответствующее число кольцевых ферритовых сердечников с обмотками...
Попередній патент: Резистивний сплав на основі галію
Наступний патент: Спосіб пластичного закриття дефекту у вигляді свища або перфораційного отвору верхньощелепної пазухи
Випадковий патент: Спосіб регулювання тиску повітря в шинах колес транспортного засобу зі здвоєними базовими колесами