Спосіб заглушування завад для доплеровської рсл з селекцією рухомих цілей, які викликані відбиттям електромагнітних хвиль від рослинності та інших предметів, які коливаються
Номер патенту: 17870
Опубліковано: 03.06.1997
Автори: Рогов Петро Дмитрович, Дубровський Сергій Егорович, Феньов Дмитро Васильович, Касаткін Леонід Веніамінович
Формула / Реферат
Способ подавления помех для доплеровских РЛС с селекцией движущихся целей, вызванных отражениями электромагнитных волн от растительности и других колеблющихся предметов, расположенных в зоне действия РЛС, заключающийся в выделении и усилении отраженных сигналов с доплеровскими поправками частоты, содержащими информацию о величине и знаке радиальной скорости цепи, разделении на основе частотной фильтрации и независимом усилении сигналов, отраженных от цепей, различающихся знаком радиальной скорости и, соответственно, знаком доплеровской поправки частоты, фильтрации сигналов в полосе измеряемых доплеровских частот, отличающийся тем, что сигналы, соответствующие прямым и обратным радиальным скоростям движущихся объектов, после усиления в независимых усилителях 1-го и 2-го каналов соответственно разделяются по величинам доплеровских частот при помощи двух независимых идентичных гребенок фильтров, соответственно, 1-го и 2-го каналов, сигналы на выходе каждого парциального фильтра с номером I указанных гребенок детектируются и интегрируются в течение нескольких периодов механических колебаний предметов, создающих помехи, затем после интегрирования производится операция вычитания друг из друга сигналов, соответствующих идентичным интервалам доплеровских частот т.е. сигналов на выходе идентичных парциальных фильтров 1-го и 2-го каналов, результаты вычитания всех пар сигналов 1-го и 2-го каналов характеризуют движущиеся цели в определенных интервалах скоростей и эти сигналы индицируются.
Текст
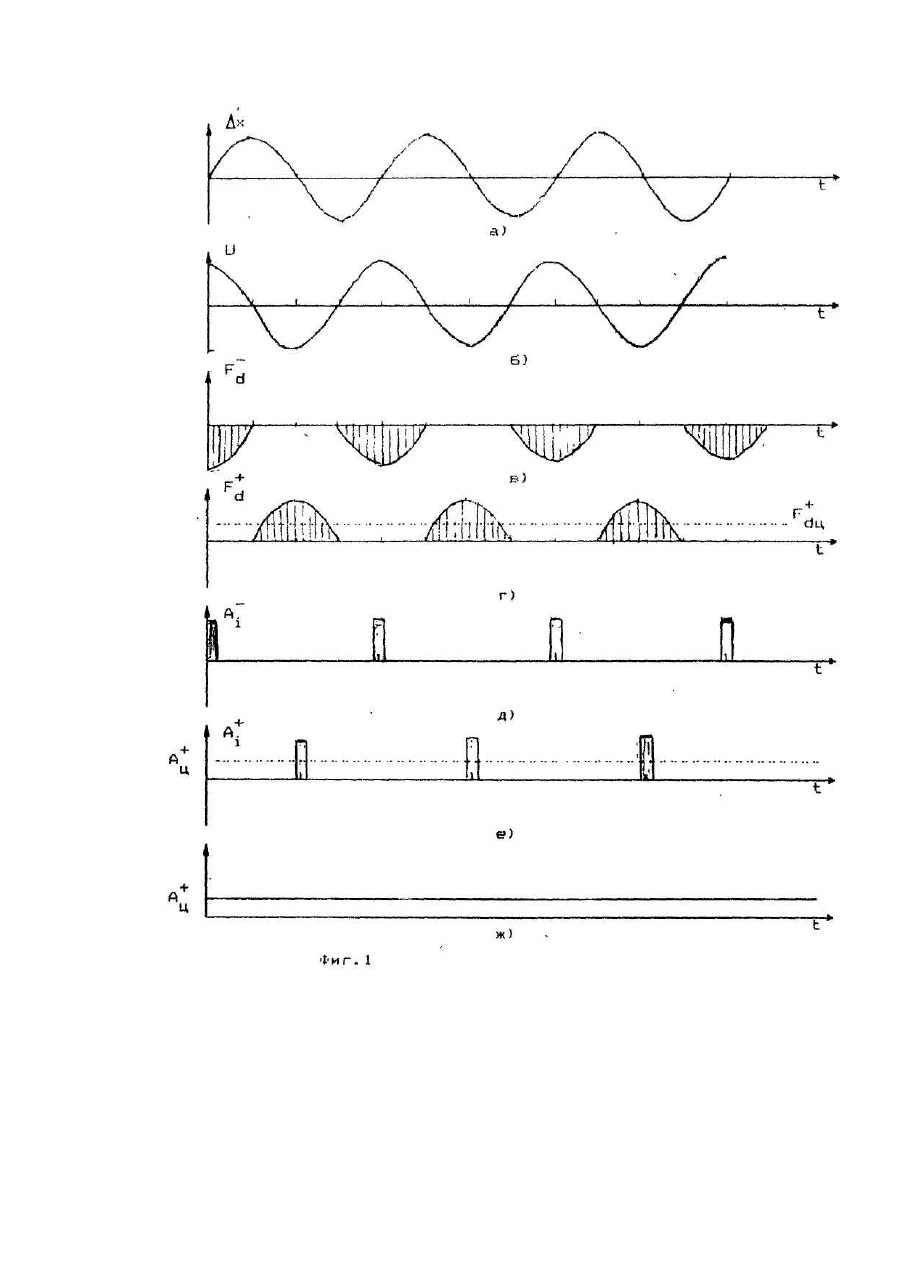
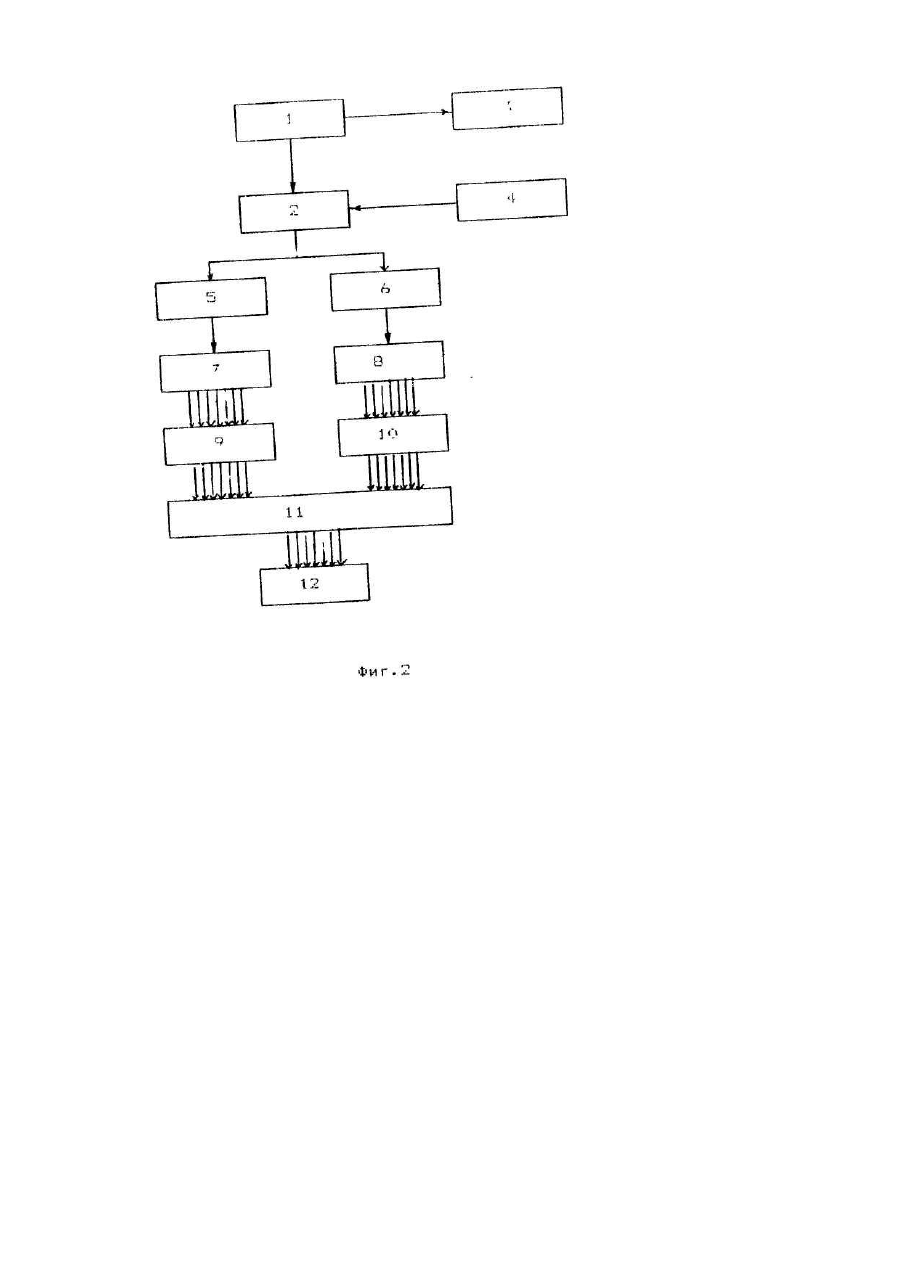
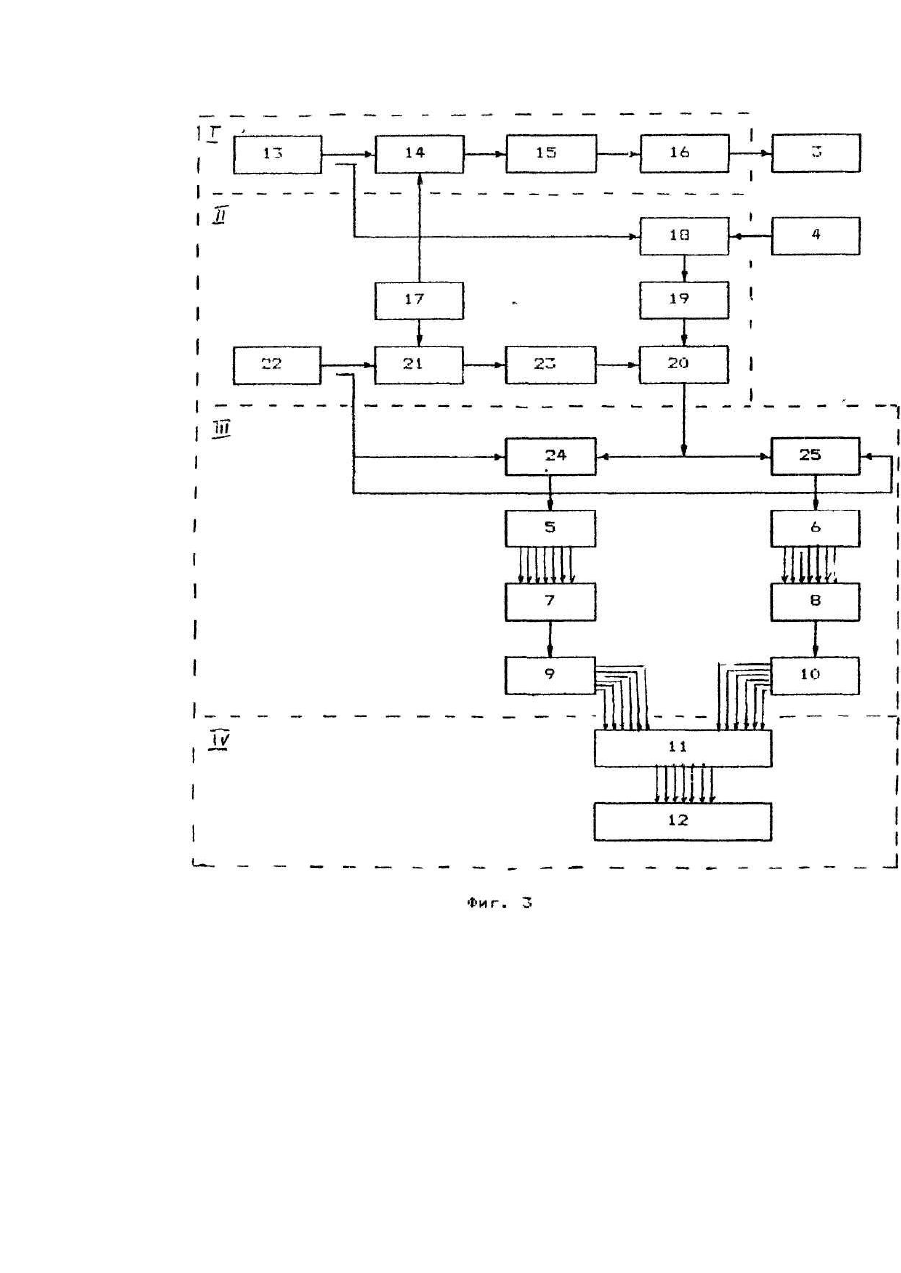
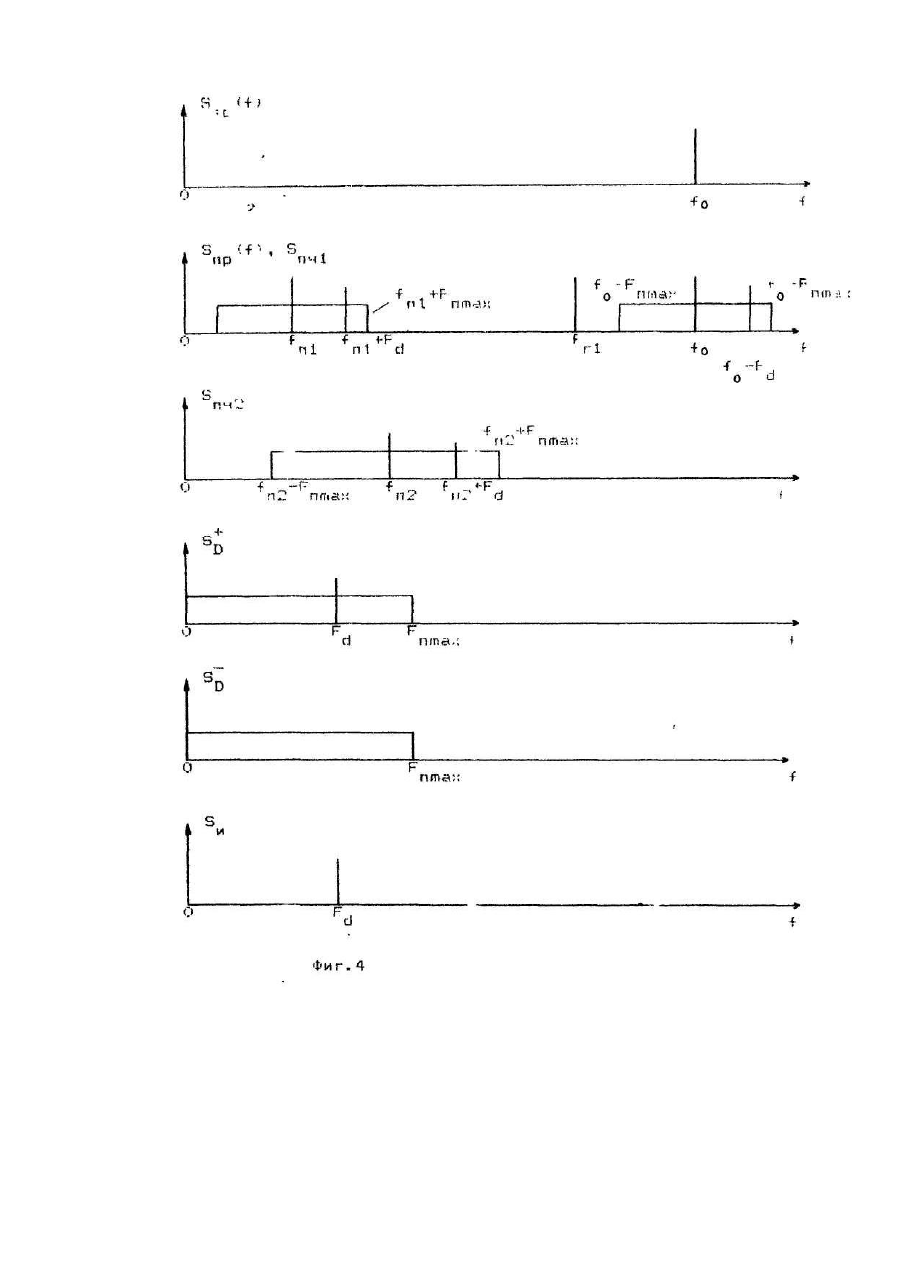
Изобретение относится к радиолокационной технике, а точнее к доплеровским РЛС с селекцией движущи хся целей. Изобретение наиболее эффективно может быть использовано в системах охраны, в пограничной и таможенной службах, в навигационных системах морских и авиапортов. Известны способы существенного уменьшения уровня отраженных сигналов от распределенных поверхностных целей, т.е. помех от растительности и других колеблющихся объектов. Эти способы, основанные прежде всего на сокращении размеров разрешаемого объема (поверхности) за счет увеличения разрешающей способности по координатам, позволяют существенно уменьшить ЗПР распределенных целей и в связи с этим снизить уровень помех без уменьшения сигнала, отраженного от движущегося лоцируемого объекта (Теоретические основы радиолокации // Под ред. Я.Д.Ширмана. - М., Сов.радио, - 1970). Другой широкий класс способов подавления помех основан на совершенствовании антенных систем РЛС с целью снижений уровня их боковых лепестков излучения, введения компенсации помех при использовании дополнительных антенных элементов. В результате повышается избирательность антенн, т.е. повышается пространственная селекция принимаемых колебаний и снижается суммарный уровень помех на входе приемного устройства РЛС. Эффективным способом увеличения помехозащищенности РЛС является применение в приемном устройстве оптимальной частотной селекции, обеспечивающей достижение максимального отношения сигнал/помеха. Оптимальный фильтр строится с учетом спектра отраженного сигнала от движущейся цепи и подавляет спектральные составляющие сигналы помехи, лежащие вне этого спектра. Приведенные способы могут быть применены для снижения уровня помех от распределенных целей (поверхностных и объемных) в РЛС любого типа и любого функционального назначения. Наиболее близким к предлагаемому (прототипом) является способ подавления помех, применяемый в когерентно-импульсных РЛС с селекцией движущи хся целей (Бакулев П.А., Степин В.М. Методы и устройства селекции движущи хся целей. - М., Радио и связь, 1986). Этот способ основан на применении режекторных гребенчатых фильтров с полосами подавления сигналов помехи и с полосами пропускания Здесь fо - несущая частота зондирующего импульсного сигнала передатчика; Fn - частота повторения импульсных сигналов; Fdn max - наибольшая эффективная частота спектра помех; Fdmi n и Fd max минимальная и максимальная доплеровские частоты сигнала, отраженного от движущейся цели со скоростями в интервале Принципиальным недостатком известного способа подавления помех в импульсно-доплеровских РЛС является то, что подавляются помехи лишь в областях частот, в которых отсутствуют измеряемые доплеровские частоты, соответствующие отражениям от лоцируемых движущихся объектов. Однако, колеблющиеся объекты, расположенные в зоне действия РЛС, в частности деревья, кустарники и т.п., могут создавать отраженные сигналы с доплеровскими поправками, лежащими в той же области частот, что и доплеровские частоты от обнаруживаемых движущи хся объектов. Например, если колеблющийся объект типа ветки дерева или кустарника длиной 2м совершает колебания в пределах ±30° с частотой 1 Гц, то максимальная линейная колебательная скорость составит Vmax ≃6 м/сек, а средняя скорость колебаний ветки Vср ≃3 м/сек; в РЛС ближнего действия, в системах охраны объектов либо в системах пограничной и таможенной служб обычно требуется лоцировать цели со скоростями движения 0,5 - (10-20) м/сек. Уровень помех, создаваемых распределенной поверхностной целью, например, поверхностью покрытой кустарниками при наличии ветра, снижается с удалением от РЛС пропорционально 1 /r3, в то время как полезный сигнал, отраженный от локальной цели уменьшается пропорционально 1/r4. Таким образом, увеличение расстояния приводит к уменьшению отношения сигнал/помеха обратно пропорционально расстоянию. В результате уровень помехи может оказаться существенно большим чем уровень сигнала, что при использовании известного способа подавления помех потребует увеличения измеряемой минимальной частоты Доплера и соответственно отказа от локации движущихся целей на значительных расстояниях с малыми скоростями. Целью данного изобретения является существенное увеличение эффективности подавления помех для РЛС доплеровского типа с селекцией движущи хся целей, вызванных отражениями электромагнитных волн от растительности и других колеблющихся объектов, расположенных в зоне действия РЛС и увеличения дальности обнаружения движущи хся объектов на фоне помех, вызванных колеблющимися предметами. Предлагаемый способ включает операции выделения сигналов с доплеровскими частотами, соответствующими прямым и обратным радиальным скоростям движущихся обьектов, усиления этих сигналов, разделение на основе частотной фильтрации и независимом усилении в идентичных 1-ом и 2-ом каналах сигналов, отраженных от целей, различающихся знаком радиальной скорости и соответственно знаком доплеровской поправки частоты, разделения доплеровских сигналов по величинам доплеровских частот при помощи двух независимых гребенок фильтров соответственно 1-го и 2-го каналов, детектирование и интегрирование сигналов на выходе каждого парциального фильтра указанных гребенок в течение нескольких периодов механических колебаний предметов, создающих помехи, вычитания друг из друга сигналов, соответствующи х идентичным интервалам доплеровских частот, т.е. сигналов на вы ходе идентичных парциальных фильтров 1-го и 2-го каналов, операция индикации результатов вычитания проинтегрированных сигналов в каждом парциальном интервале доплеровских частот. Новыми существенными признаками изобретения являются вновь введенные операции: - детектирование и интегрирование в течение нескольких периодов механических колебаний предметов, создающих помехи, сигналов в каждом узком интервале доплеровских частот на выходе парциальных фильтров в двух независимых идентичных каналах обработки сигналов, различающихся знаком доплеровской поправки частоты т.е. соответствующи х отражениям от целей различающихся знаком радиальной скорости; - вычитание проинтегрированных сигналов прямого и обратного движения, соответствующи х идентичным интервалам доплеровских частот; - индикация результатов вычитания проинтегрированных сигналов в каждом парциальном интервале доплеровских частот. Введение новых существенных признаков позволяет в значительной степени подавить сигналы помех, вызванных отражениями электромагнитных колебаний от колеблющихся предметов таких, как растительный покров, кустарники, деревья и благодаря этому увеличить дальность действия РЛС по малоразмерным целям, движущимися с малыми скоростями. Сущность предлагаемого способа и принцип его функционирования поясняется следующим образом. Отражающие колеблющиеся предметы, находящиеся в зоне действия РЛС могут быть представлены совокупностью механических систем, совершающих гармонические колебания с различными амплитудами aj, начальными фазами ФIo, частотами колебаний W I. Отраженный электромагнитный сигнал от такой совокупности механических осцилляторов дополнительный набег фазы, определяемый доплеровской поправкой частоты W di (f); wο, lο - частота и длина волны зондирующего сигнала РЛС; Uпаді - амплитуда падающего (зондирующего) сигнала на i-ый колеблющийся предмет; Г І =Г exp (j g ) - комплексный коэффициент отражения i-го элемента объекта, совершающего колебания с І І радиальной проекцией линейной скорости Vіг(t). В том случае, когда колеблющийся предмет может быть представлен аналогом колеблющегося маятника в плоскости, проходящей через РЛС, с длиной Ιοί , начальной фазой Фоі, частотой колебаний Wі и наибольшим отклонением фазы от равновесного значения ΔΦοί , отраженный сигнал содержит сплошной спектр доплеровских частот где 0 < l i < lоі. Таким образом минимальные доплеровские поправки близки к нулю и соответствуют отражающим областям маятника вблизи его оси; максимальные значения частоты Доплера W dmax = Ιoi ΔF oi W I. Можно видеть, что доплеровская частота каждого отражающего элемента колеблющегося объекта изменяется по гармоническому закону т.е. в рассматриваемой модели имеют место одинаковые частотные спектры, соответствующие движению объекта с прямыми и обратными скоростями по отношению к РЛС. В качестве иллюстрации на фиг.1 приведены временные зависимости перемещения Δx (t) и скорости v(t) элемента отражающего колеблющегося объекта - фиг. 1а и 1б. Доплеровские частоты Fd- и Fd+, соответствующие движению элемента от РЛС и по направлению к РЛС приведены на фиг. 1в и 1г. После прохождения узкополосных парциальных фильтров 1-го и 2-го каналов, соответствующи х в изображенном на фиг.1 случае максимальным доплеровским частотам, возникают после детектирования сигналы Aj-(t) и Aj+(t) - рис.1д и 1е. После интегрирования и вычитания указанные сигналы помехи, вызванные колеблющимся отражающим объектом компенсируются, В то же время, если в поле действия РЛС находится движущаяся цель, создающая постоянную по знаку доплеровскую поправку частоты F d+ (движение на РЛС - см. фиг.1г), то соответствующий сигнал цели будет фиксироваться на индикаторе - фиг. 1з. В случае многих отражающих колеблющихся объектов суммарный отраженный сигнал, являющийся результатом интерференции всех отражений, фактически представляется как шумовая помеха. В большинстве случаев помехи для радиолокации ближнего действия, вызванные совокупностью отражений от подстилающей поверхности, местных предметов, содержащих в том числе колеблющиеся объекты, рассматриваются как случайные процессы, описываемые вероятностными характеристиками (Шелухин О.И. Радиосистемы ближнего действия. М., Радио и связь, 1989). При таком рассмотрении структура помехи не анализируется и выделение слабого сигнала обеспечивается частотной фильтрацией. В то же время совокупность колеблющихся объектов, таких как деревья, кустарники и т.п. совершающи х собственные колебания, может быть представлена системой осцилляторов, каждый из которых в течение определенного интервала времени Dt совершает колебания с определенными амплитудами, частотами и фазами. Предлагаемый в данном техническом решении способ подавления помех вызванных отражениями электромагнитных волн от колеблющихся объектов, основан на анализе структуры реальной помехи, являющейся суммой сигналов переизлученных каждым элементом колеблющегося объекта. В этом случае, в пределах отрезков времени Dt, пока сохраняется практически неизменным равновесное положение каждого колеблющегося элемента, т.е. в выражении (2) может считаться фиксированной начальная фаза Фoj, суммарные спектры доплеровских сигналов всех колеблющи хся объектов и их элементов, соответствующие прямым и обратным движениям будут близки друг к другу. Это означает, что рассматриваемая помеха, связанная с переизлучением колеблющихся объектов, может быть скомпенсирована, если доплеровские сигналы, соответствующие движениям прямым и обратным, после их интегрирования будут вычтены друг из друга. В результате останется нескомпенсированным только доплеровский сигнал, соответствующий перемещению объекта в прямом или обратном направлении. Операции детектирования, интегрирования и вычитания с целью подавления помех от колеблющихся объектов могут быть применены как по отношению к суммарным сигналам доплеровских частот, соответствующи х прямому и обратному движениям, так и по отношению к сигналам после прохождения гребенки фильтров доплеровских частот, позволяющих выделить сигналы, соответствующие узким интервалам скоростей целей. В последнем варианте реализации предлагаемого способа обеспечивается измерение скоростей движущи хся объектов с учетом знака радиальной скорости, при одновременном существенном увеличении отношения сигнал/помеха за счет сужения полосы частот в каждом парциальном канале гребенчатого фильтра. Введение новых существенных признаков, а именно: детектирование и интегрирование в течение нескольких периодов механических колебаний предметов, создающих помехи, сигналов на выходе парциальных фильтров в двух независимых каналах обработки сигналов, различающихся знаком радиальной скорости; вычитание проинтегрированных сигналов прямого и обратного движения, соответствующи х идентичным интервалам доплеровских частот; индикация результатов вычитания проинтегрированных сигналов в каждом парциальном интервале доплеровских частот, как следует из приведенного выше разъяснения существа предлагаемого способа, обеспечивает существенное увеличение эффективности подавления помех для доплеровских РЛС с селекцией движущи хся целей, вызванных отражениями электромагнитных волн от растительности и других колеблющихся объектов, расположенных в зоне действия РЛС и увеличение дальности обнаружения движущи хся целей на фоне помех, вызванных колеблющимися предметами. На фиг. 1 представлены временные зависимости характеристик движения источников помех, основных характеристик принимаемого сигнала, поясняющие суть предлагаемого способа; на фиг. 2 – схема совокупности операции, составляющих существо предлагаемого способа; на фил 3 - схема доплеровской РЛС ближнего действия с седекцией движущи хся целей, в которой реализуется предлагаемый способ; на фиг. 4 - спектральные и временные характеристики сигналов в различных узлах схемы фиг.3, реализующей предлагаемый способ. На фиг. 2, представляющей схему последовательности операций, составляющих существо предлагаемого способа; приняты обозначения: 1 - известная операция генерирования СВЧ зондирующего сигнала; 2 - известная операция приема, усиления и разделения отраженных сигналов от движущи хся целей на сигналы, соответствующие движению в прямом и в обратном направлениях; 3 - известная операция излучения зондирующего сигнала антенной передающего устройства РЛС; 4 - известная операция приема отраженного сигнала антенной приемного устройства РЛС; 5 - известная операция усиления доплеровских сигналов, соответствующи х движению целей в прямом направлении; 6 - известная операция усиления доплеровских сигналов, соответствующи х движению целей в обратном направлении; 7 - вновь введенная операция согласно предлагаемого способа фильтрации доплеровского прямого сигнала гребенкой фильтров; 8 - вновь введенная операция согласно предлагаемого способа фильтрации доплеровского обратного сигнала гребенкой фильтров; 9 - вновь введенная операция согласно предлагаемого способа детектирования и интегрирования доплеровского прямого сигнала после прохождения каждого i-го фильтра в операции 7; 10 - вновь введенная операция согласно предлагаемого способа детектирования и интегрирования доплеровского обратного сигнала после прохождения каждого i-го фильтра в операции 8; 11 - вновь введенная операция согласно предлагаемого способа вычитания проинтегрированных сигналов прямого и обратного движения целей, соответствующих идентичным интервалам доплеровских частот; 12 - вновь введенная операция согласно предлагаемого способа индикации результатов вычитания проинтегрированных сигналов в каждом парциальном интервале доплеровских частот. Согласно фиг 3 пример конкретного выполнения доплеровской РЛС с селекцией движущи хся целей, в которой реализуется предлагаемый способ подавления помех, содержит передающее устройство I, приемное устройство II, блок III раздельного усиления сигналов движущихся целей в прямом и в обратном направлениях, блок IV подавления помех и индикации движущихся целей. Передающее устройство I включает частотно стабилизированный задающий генератор 13, являющийся одновременно гетеродином приемного устройства, смеситель сдвига частоты (14), формирующий совместно с фильтром (15) и дополнительным гетеродином (17) зондирующий сигнал передающего устройства, поступающий после усиления (16) в антенну передатчика (3). Приемное устройство И содержит приемную антенну (4), балансный смеситель (18), к выходу которого подключен первый усилитель промежуточной частоты УПЧ-1 (19), второй балансный смеситель (20) к которому подводится сигнал второго гетеродина (21). Сигнал второго гетеродина формируется смещением по частоте колебаний 1-го гетеродина (17) при использовании дополнительного частотно стабилизированного генератора (22) и фильтра (23). Блок III раздельного усиления сигналов отраженных от целей, движущи хся в прямом и в обратном направлениях включает синхронные детекторы (24) и (25) указанных раздельных каналов, к которым подводится сигнал генератора (22) и сигналы с усилителей доплеровских частот (5), (6). Все последующие узлы конкретного выполнения доплеровской РЛС полностью соответствуют представленной на фиг. 2 схеме совокупности операций, составляющих существенно предлагаемого способа. При этом: (5), (6) - усилители доплеровских сигналов, соответствующи х движению целей в прямом и в обратном направлениях; (7), (8) - гребенчатые фильтры доплеровских сигналов, соответствующи х движению целей в прямом и в обратном направлениях; (9), (10) - блоки детектирования интегрирования доплеровских прямого и обратного сигналов соответственно после прохождения каждого парциального фильтра в гребенках фильтров (7),(8); (11) - блок вычитания проинтегрированных сигналов прямого и обратного движения целей, соответствующи х идентичным интервалам доплеровских частот; (12) - индикатор результатов вычитания проинтегрированных сигналов в каждом парциальном интервале доплеровских частот. На фиг. 4 приведены спектральные характеристики сигналов в различных узлах доплеровской РЛС непрерывного действия с селекцией движущихся целей (3), в которой реализуется предлагаемый способ подавления помех. На фиг. 4а - спектр излучаемого зондирующего сигнала с частотой fо ; на фиг. 4б - спектр отраженного сигнала от неподвижных целей с частотой fо, от движущи хся целей с частотой (fo + F d), от колеблющейся растительности и други х подобных целей - (fо ± Fn); на этой же фиг.4б приведены спектр i-го гетеродина (13) с частотой fг1 и спектр сигнала после i-го смесителя (18) с несущей частотой fn1 (первая промежуточная частота). На фиг. 4в приведены спектры сигнала после первого усилителя промежуточной частоты (19), сигнала второго гетеродина (21) с частотой fr2, сигнала 2-го смесителя (20) с несущей частотой fn2 (вторая промежуточная частота). На фиг. 4г и 4д приведены спектры сигналов после синхронных детекторов (24), (25), соответствующие сигналам отраженным от движущи хся целей в прямом и в обратном направлениях соответственно (на входе фильтров (7), (8). На фиг. 4е приведен спектр сигнала на индикаторе (12) после детектирования, интегрирования и вычитания сигналов прямого и обратного движения целей, соответствующи х идентичным интервалам доплеровских частот. Как видно из фиг. 4, реализация предлагаемого способа в доплеровских РЛС с селекцией движущихся целей обеспечивает достижение поставленной цели, а именно, существенное подавление помех, вызванных отражениями от растительности и други х колеблющихся предметов, расположенных в зоне действия РЛС и. вследствие этого, увеличение дальности обнаружения движущи хся объектов на фоне помех, вызванных колеблющимися объектами. Предлагаемый способ подавления помех не ограничивается вышеописанным примером его осуществления. Данный способ может быть реализован в различных классах РЛС с селекцией движущи хся целей, в которых обеспечивается раздельное определение целей, движущихся в направлении на РЛС и от нее. В частности, в полной мере данный предлагаемый способ подавления помех применим в когерентноимпульсных системах селекции движущихся целей. Оценка реализуемости и эффективности предлагаемого способа проводилась методами математического моделирования на ПЭВМ.
ДивитисяДодаткова інформація
Автори англійськоюDubrovskyi Serhii Yehorovych, Rohov Petro Dmytrovych, Feniov Dmytro Vasyliovych
Автори російськоюДубровский Сергей Егорович, Рогов Петр Дмитриевич, Фенев Дмитрий Васильевич
МПК / Мітки
МПК: G01S 7/36, G01S 13/50
Мітки: доплеровської, селекцією, інших, предметів, рослинності, коливаються, цілей, електромагнітних, викликані, заглушування, хвиль, відбиттям, завад, рухомих, рсл, спосіб
Код посилання
<a href="https://ua.patents.su/8-17870-sposib-zaglushuvannya-zavad-dlya-doplerovsko-rsl-z-selekciehyu-rukhomikh-cilejj-yaki-viklikani-vidbittyam-elektromagnitnikh-khvil-vid-roslinnosti-ta-inshikh-predmetiv-yaki-kolivayu.html" target="_blank" rel="follow" title="База патентів України">Спосіб заглушування завад для доплеровської рсл з селекцією рухомих цілей, які викликані відбиттям електромагнітних хвиль від рослинності та інших предметів, які коливаються</a>
Бортовий секвентний радіолокатор для виявлення рухомих цілей на поверхні землі
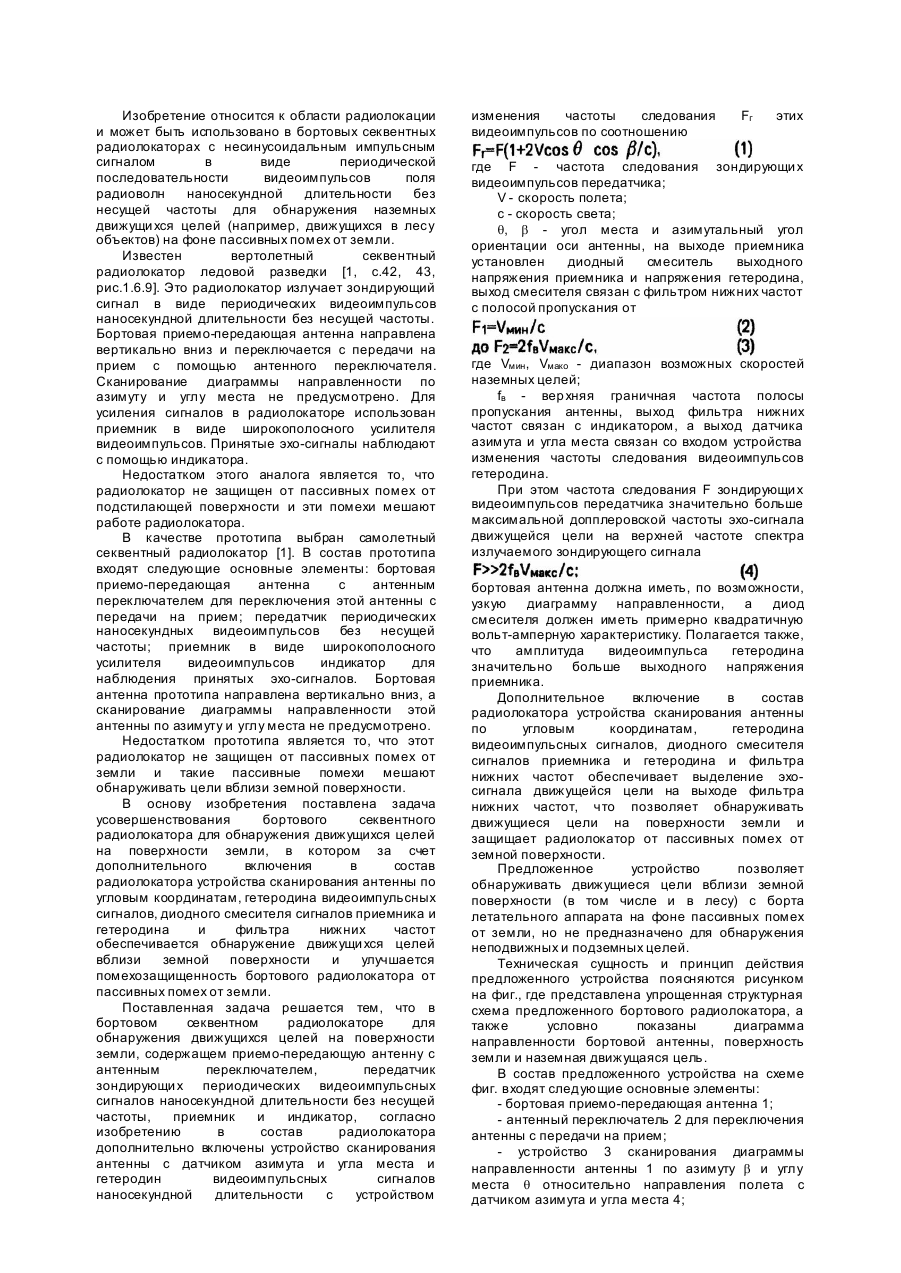
Номер патенту: 17458
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: секвентний, бортовий, землі, рухомих, цілей, радіолокатор, виявлення, поверхні
Формула / Реферат:
Бортовой секвентный радиолокатор для обнаружения движущихся целей на поверхности земли, содержащий приемо-передающую антенну с антенным переключателем, передатчик зондирующих периодических видеоимпульсных сигналов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включены устройство сканирования антенны с датчиком азимута и угла места и гетеродин видеоимпульсных...
Спосіб зважування рухомих об`єктів
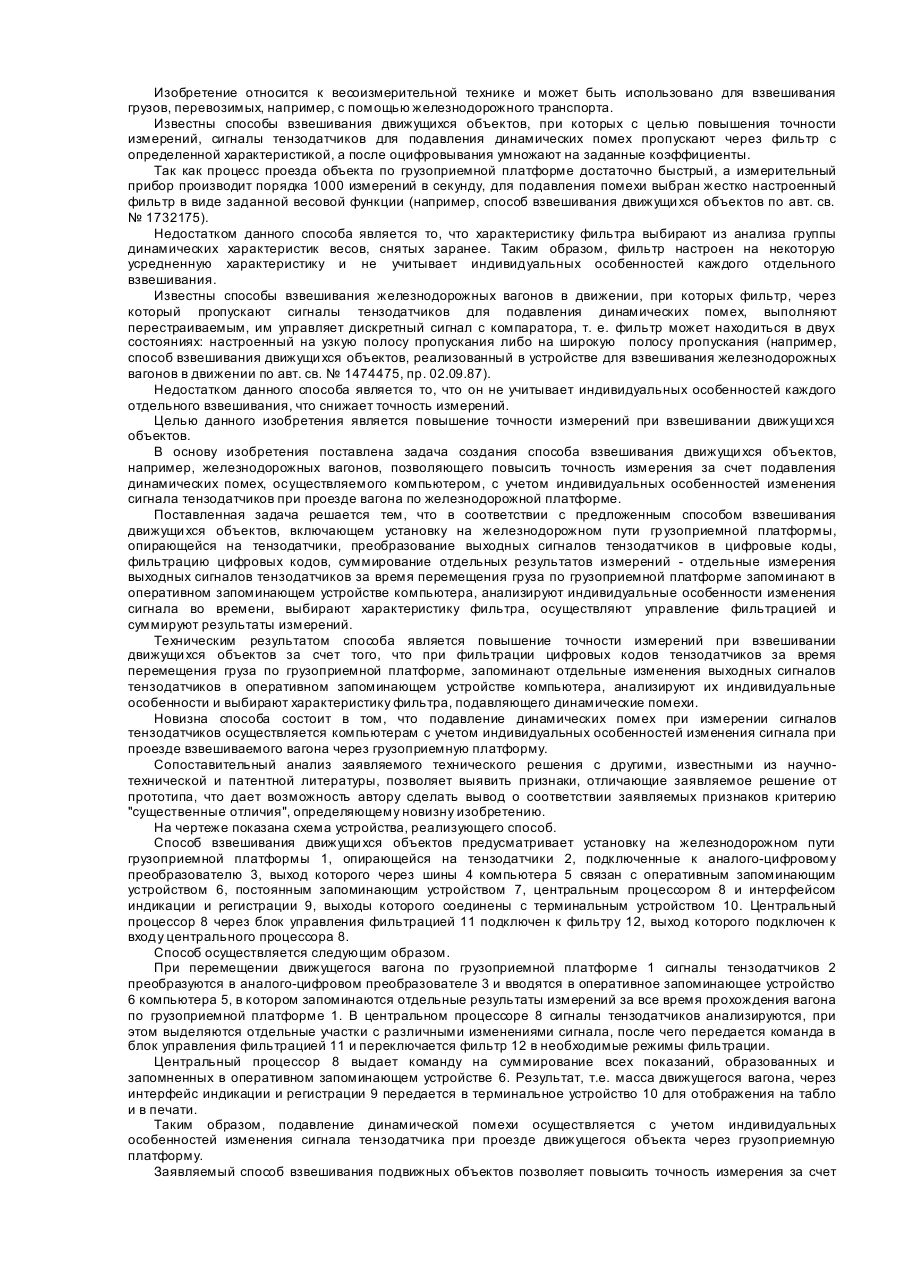
Номер патенту: 17600
Опубліковано: 06.05.1997
Автор: Дашевський Яків Тевелович
МПК: G01G 23/00, G01G 19/04
Мітки: об'єктів, спосіб, рухомих, зважування
Формула / Реферат:
Способ взвешивания движущихся объектов, включающий установку на железнодорожном пути грузоприемной платформы, опирающейся на тензодатчики, преобразование выходных сигналов тензодатчиков в цифровые коды, фильтрацию цифровых кодов, суммирование отдельных результатов измерений, отличающийся тем, что отдельные измерения выходных сигналов тензодатчиков за время перемещения груза по грузоприемной платформе запоминают в оперативном запоминающем...
Спосіб вимірювання азимуту повітряних цілей
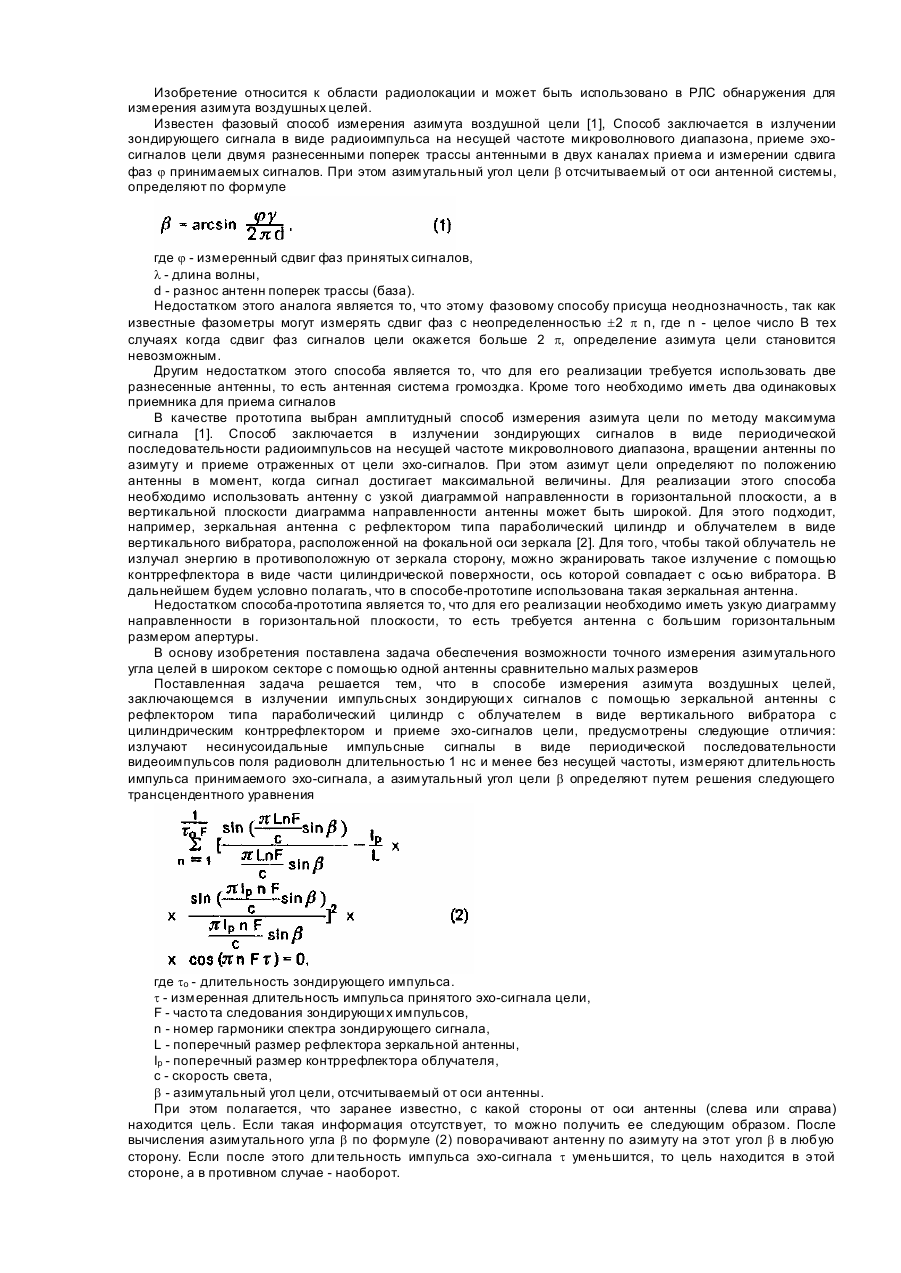
Номер патенту: 13423
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: повітряних, азимуту, вимірювання, спосіб, цілей
Формула / Реферат:
Способ измерения азимута воздушных целей, заключающийся в излучении импульсных зондирующих сигналов с помощью зеркальной антенны с рефлектором типа параболический цилиндр с облучателем в виде вертикального вибратора с цилиндрическим контррефлектором и приеме эхо-сигналов цели, отличающийся тем, что излучают несинусоидальные импульсные сигналы в виде периодической последовательности видеоимпульсов поля радиоволн длительностью 0,1-1 не без...
Спосіб визначення декрементів частотно-залежного затухання сейсмічних хвиль
Номер патенту: 4323
Опубліковано: 27.12.1994
Автор: Карпенко Іван Володимирович
Мітки: затухання, декрементів, хвиль, частотно-залежного, визначення, сейсмічних, спосіб
Формула / Реферат:
1. Способ определения декрементов частотно-зависимого затухания сейсмических волн в условиях естественного залегания слоистых геологических сред основанный на возбуждении упругих волн источником, регистрации поля отраженных волн сейсмоприемниками по системе многократного профилирования и его обработке по методу общей глубинной точки, изучении изменения спектра мощности элементарного сейсмического сигнала, проходящего исследуемую толщу и...
Пристрій захисту від комбінованих завад
Номер патенту: 14711
Опубліковано: 04.02.1997
Автори: Ткаченко Віктор Михайлович, Мезенцев Олексій Вікторович, Леховицький Давід Ісаакович
МПК: G01S 7/38
Мітки: комбінованих, захисту, завад, пристрій
Формула / Реферат:
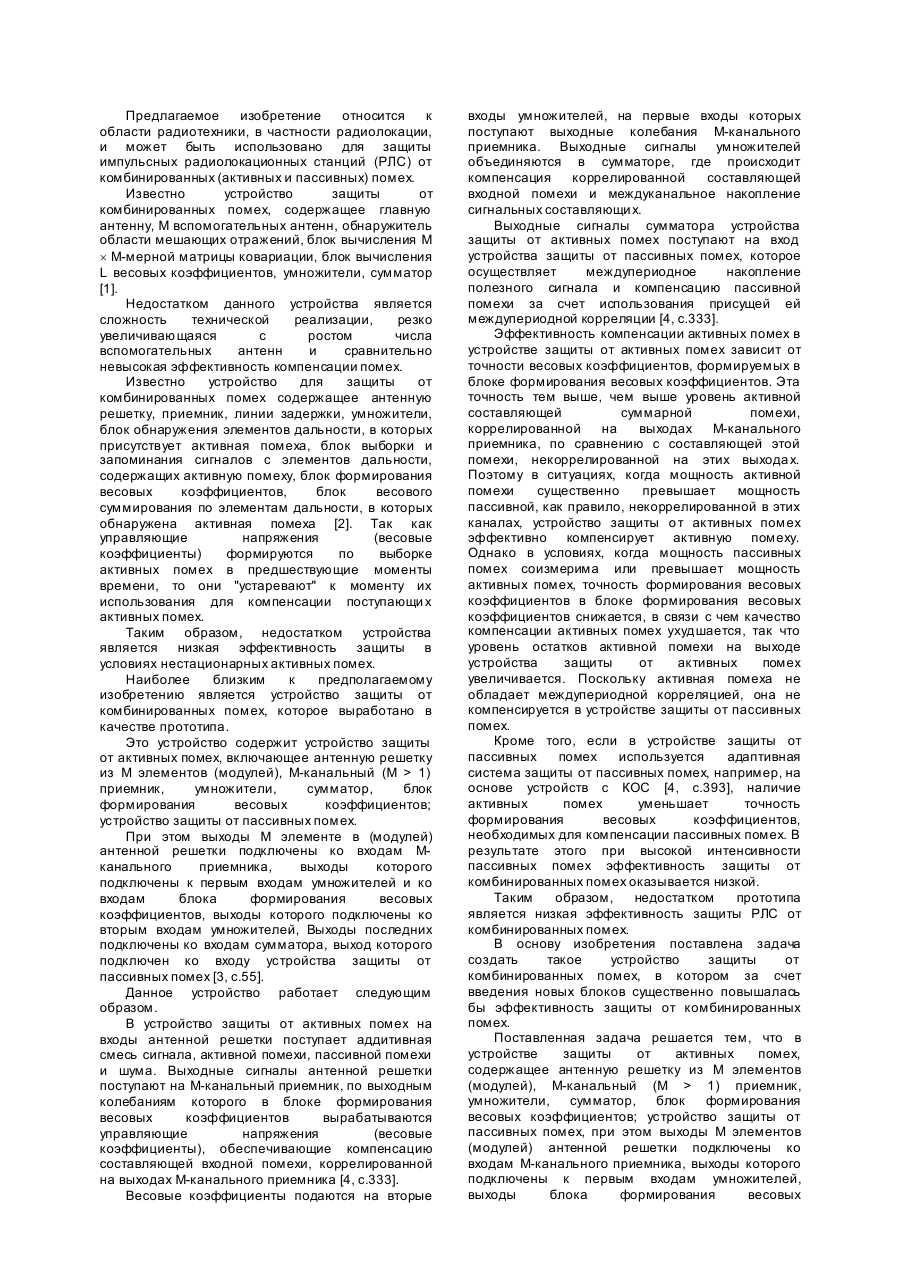
Устройство защиты от комбинированных помех, содержащее устройство защиты от активных помех, включающее антенную решетку из M элементов (модулей), M-канальный (M > 1) приемник, умножители, сумматор, блок формирования весовых коэффициентов; устройство защиты от пассивных помех, при этом выходы M элементов (модулей) антенной решетки подключены ко входам M-канального приемника, выходы которого подключены к первым входам умножителей, выходы...
Попередній патент: Спосіб лікування хронічного гранулюючого периодонтиту
Наступний патент: Спосіб заглушування завад для доплеровської рлс з селекцією рухомих цілей, які викликані відбиттям електромагнітних хвиль від об’ємних розподілених цілей
Випадковий патент: Спосіб удобрювання ґрунту