Комбінований грунтообробний агрегат

Формула / Реферат
Комбінований ґрунтообробний агрегат, який містить раму, що спирається на опорні елементи, які закріплені на вертикальних опорних стояках, і всередині якої розташований привод обертання, а також встановлений в поперечному напрямі ротаційний вал, на якому закріплені фланці з робочими органами, виконаними у вигляді робочих ножів, який відрізняється тим, що агрегат додатково оснащений плоскорізами трикутної форми, встановленими з кутом атаки 3-10° на вертикальних стояках на передній поперечній балці рами і виконаними у вигляді трикутної основи з прикріпленими до неї ножами, на різальні кромки яких нанесене точкове покриття у вигляді наплавлених кіл з зносостійкого матеріалу і до яких прикріплені вертикальні ножі з наплавленою суцільною зносостійкою різальною кромкою, що примикають до вертикальних стояків, а також оснащений другим додатковим ротаційним валом з робочими ножами і горизонтальною віссю обертання, зв'язаним з приводом обертання і з першим ротаційним валом за допомогою ланцюгової передачі, причому робочі ножі на першому ротаційному валу виконані у вигляді Г-подібних знімних пластин, відігнута частина яких має зміцнення і двостороннє заточування різальних кромок, а ножі на другому ротаційному валу виконані плоскими у вигляді прямолінійних пластин із заточуванням і зміцненням різальних кромок або без таких, причому робочі Г-подібні ножі на першому ротаційному валу прикріплені до нього нерухомо, а робочі плоскі ножі на другому ротаційному валу прикріплені до нього шарнірно, а також, на задній поперечній балці рами встановлений пристрій для вирівнювання ґрунту, який виконано у вигляді гребінки з набору вертикальних зігнених пластин, зазори між якими відповідають максимально допустимому розміру подрібнених залишків рослинного походження і шматочків ґрунту, причому відстань між гребінкою і другим ротаційним валом вибрана такою, що плоскі ножі другого ротаційного вала входять в зазори між зігненими пластинами гребінки, а нижні кромки вертикальних зігнених пластин гребінки знаходяться на одному рівні з плоскорізами, крім того, опорні елементи виконані у вигляді лиж, а вертикальні опорні стояки виконані у вигляді гідроциліндрів, встановлених на зовнішніх боках подовжніх балок рами агрегату.
Текст
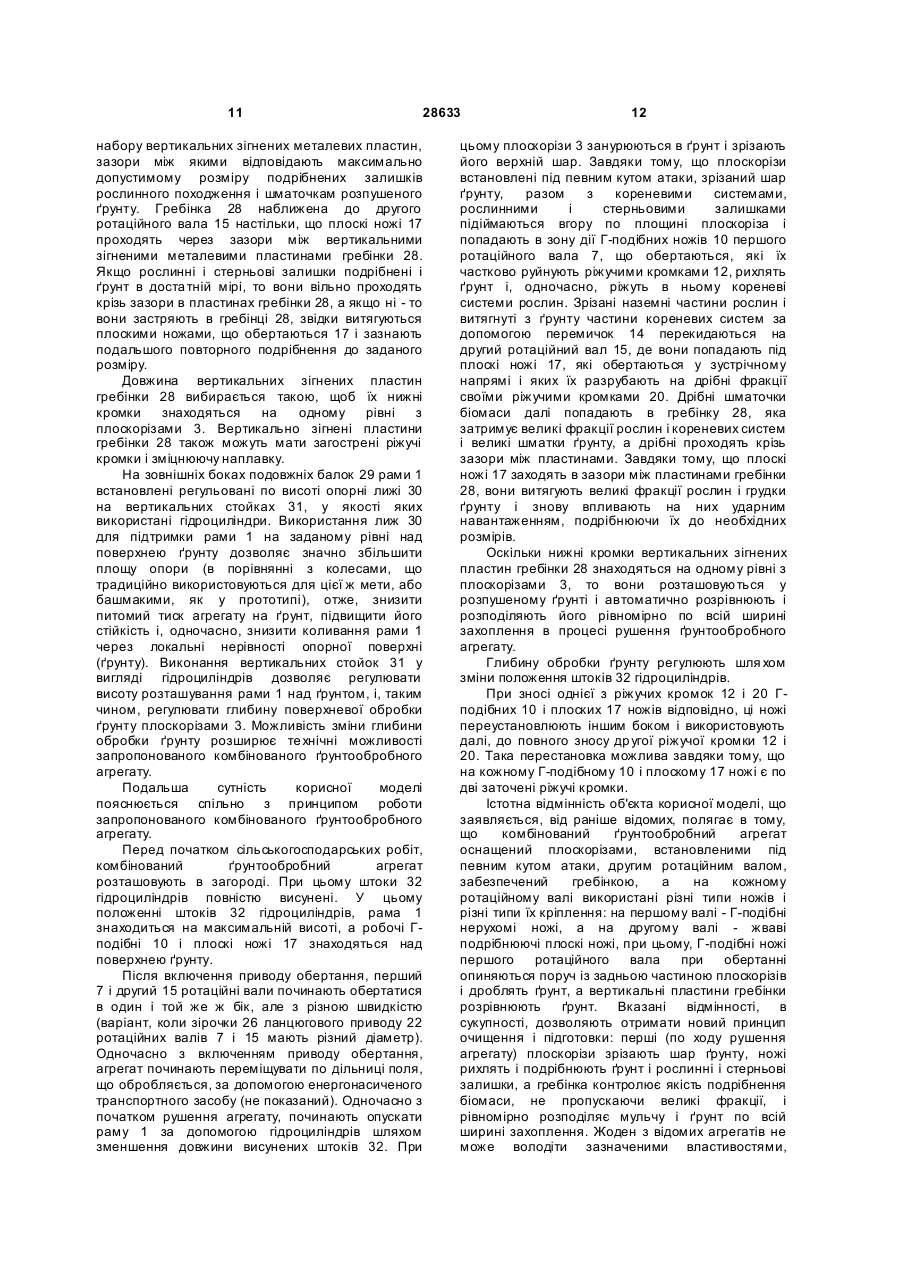
Комбінований ґрунтообробний агрегат, який містить раму, що спирається на опорні елементи, які закріплені на вертикальних опорних стояках, і всередині якої розташований привод обертання, а також встановлений в поперечному напрямі ротаційний вал, на якому закріплені фланці з робочими органами, виконаними у вигляді робочих ножів, який відрізняється тим, що агрегат додатково оснащений плоскорізами трикутної форми, встановленими з кутом атаки 3-10° на вертикальних стояках на передній поперечній балці рами і виконаними у вигляді трикутної основи з прикріпленими до неї ножами, на різальні кромки яких нанесене точкове покриття у вигляді наплавлених кіл з зносостійкого матеріалу і до яких прикріплені вертикальні ножі з наплавленою суцільною зносостійкою різальною кромкою, що примикають до вертикальних стояків, а також оснащений другим додатковим ротаційним валом з робочими ножами і горизонтальною віссю обертання, зв'язаним з приводом обертання і з першим ротаційним валом за допомогою U 2 (19) 1 3 28633 місце забиття роздрібнювального апарату при дробленні розвиненого зеленого бадилля. Потрібно також зазначити, що горизонтальне розташування каліброваних ланцюгів при роботі пристрою не відповідає поперечному профілю грядок, що не забезпечує можливості захоплення вилегного бадилля в міжряддях. Цей недолік усунений в пристрої для видалення бадилля, яке містить змонтований під захисним кожухом горизонтальний вал. На цьому горизонтальному валу встановлені елементи, для видалення та дріблення бадилля, виконані у вигляді каліброваних ланцюгів. Приєднувальна ланка кожного ланцюга жорстко скріплена з валом. Для спрощення конструкції, ланцюги, розташовані в площині, поперечній осі вала, і відповідні найбільшій висоті поперечного профілю грядок, та також сполучені між собою ланцюгами приєднувальними кінцями до кожного другого після приєднувальної ланки або до крайньої парної поперечної ланки вказаних ланцюгів. Ланцюги розташовані в площині, що проходить через вісь вала, з можливістю утворення в подовжній площині, що проходить через вісь вала, профілю грядок між їх найбільшими висотами. Для підвищення ефективності процесу дроблення ланки ланцюгів виконані з утворенням насічок і ріжучих кромок. Внаслідок цього пристрій має просту конструкцію, а елементи (ланцюги), що дроблять, володіють здатністю копіювати профіль грядок і «демпфирувати» при зіткненні з каменями і іншими твердими предметами [див. патент Росії №2192732 з класу А 01 D 23/02, 33/02 опублікований 20.11.02 р. в Бюл. №32]. Основним недоліком відомого пристрою є обмеженість області його застосування, що зумовлено конструкцією елементів, що дроблять. Цей пристрій призначений тільки для видалення картопляного, бурякового та іншого бадилля і не може забезпечити дроблення стерньових залишків з довгими, наприклад, солом'яними, і могутніми, наприклад, кукурудзяними, стеблинами: ланцюги тільки лише будуть виривати з ґрунту стерньові залишки, залишаючи в ній кореневища, що не відповідає вимогам очищення лонів перед обробкою ґрунту. Більш того частина дільниці рівного поля, що обробляється, не перекривається ланцюгами, яким би з перерахованих варіантів вони не кріпилися до вала. Отже, по ширині захоплення завжди будуть залишатися дільниці з взагалі незайманими ланцюгами залишками рослинного походження. Відомий також ґрунтообробний агрегат для мульчування рослинних і стерньових залишків, який містить раму з розташованими на ній барабаном з робочими ножами і горизонтальною віссю обертання, механізм приводу барабана у обертання. При цьому робочі ножі мають трапециєвидну форму і розташовані під кутом до осі барабана. Робочі ножі розташовані на створюючій барабана по гвинтовій лінії з правою навивкою з кроком ¼ діаметра барабана. Між основними робочими ножами розташовані додаткові робочі ножі по гвинтовій лінії з лівої навивкою, довжина яких становить ½ довжини 4 основних робочих ножів. Основні і додаткові робочі ножі нахилені в різні боки відносно подовжньої осі вала під кутом 65-70°. Основні і додаткові робочі ножі розташовані на барабані таким чином, що на другій половині довжини барабана вони розташовуються дзеркально [див. патент України №20612 з класу А 01 В 33/00 опублікований 27.02.98 р. в Бюл. №1]. Основним недоліком відомого сільськогосподарського агрегату є низька ефективність поверхневої обробки ґрунту. Цей недолік зумовлений наступним. Ножі, що закріплені на барабані, мають плоску конструкцію. Оскільки ножі встановлені на деякій відстані один від одного з певним кроком, між ними утворяться зазори. Саме ґрунт в ци х зазорах і залишається не обробленим. Інакше кажучи, відомий сільськогосподарський агрегат не забезпечує суцільність поверхневої обробки ґрунту. Ще одним істотним недоліком відомого сільськогосподарського агрегату є неможливість дроблення рослинних і стерньових залишків на дрібні фракції. Цей недолік зумовлений наступним. У конструкцію відомого сільськогосподарського агрегату входить всього один барабан з робочими ножами. При обертанні одного барабана, робочі ножі спочатку зрізають стеблини рослин, а потім відкидають їх просто назад. Тобто, стебло і коренева система рослини, попадає під ніж всього один раз. З цієї причини залишки рослинного походження не зазнають належного подрібнення, оскільки не встигають попасти під наступні ножі (або під той же самий ніж). Тому на поверхні ґрунту будуть залишатися частини рослин великої довжини, які не тільки заважають подальшій обробці ґрунту, але і повільно перегнивають, залишаючись на поверхні ґрунту декілька років, нагромаджуючись з року в рік. Все це приводить до засмічення полів, утрудняє проведення сільськогосподарських робіт або змушує провести додаткове подрібнення стеблин дисковими боронами, що загалом підвищує енергоємність і трудомісткість сільськогосподарських робіт. Наступним конструктивним недоліком відомого сільськогосподарського агрегату є його низька ремонтопридатність, оскільки робочі ножі жорстко пов'язані (приварені) до барабана. У разі вигину ножа, його необхідно зрізати і на його місце приварити новий ніж. Такі роботи недоцільно, а часом і неможливо (через небезпеку пожежі) провести в польових умовах. Оскільки оперативна заміна ножів неможлива, то може виникнути ситуація при якій або гіршає якість очищення ґрунту (у разі продовження експлуатації сільськогосподарського агрегату), або необхідний вимушений простій для ремонту сільськогосподарського агрегату. Найбільш близьким за своєю сутністю і ефекту, що досягається, і який приймається за прототип, є ґрунтообробний агрегат, який містить раму, що спирається на опорні елементи, які виконані у вигляді башмаків, закріплених на вертикальних опорних стойках, виконаних у вигляді стержнів з отворами для ручної фіксації пальцями вибраної довжини стержня, і всередині 5 28633 якої розташований привод обертання, а також встановлений в поперечному напрямі ротаційний вал, на якому закріплені фланці з робочими органами, виконаними у вигляді радіальних плоских ножів, що складаються з двох С-подібних тонких пластин, одним кінцем прикріплених до фланця, а другі кінці пластин сполучені між собою клиновидним наконечником, що має загострений носик і до якого прикріплені крила шириною 100150мм, виконаних у вигляді трикутних пластин з ріжучими кромками. Перед експлуатацією агрегату, вибирають необхідну висоту стойок і ручним способом фіксують стержні стойок за допомогою пальців. Потім включають привод обертання вала. При цьому ротаційний вал починає обертатися, а ножі здійснювати обробку ґрунту і очи щення її від рослинних і стерньових залишків. Оскільки ножі виконані з тонкого листового металу, вони частково відгинаються назад при зустрічі з ґрунтом. Тому ножі, що обертаються описують циклоїди, формуючи борозни в ґрунті [див. патент України №20306 з класу А 01 В 33/02, 63/26 опублікований 27.02.98 р. в Бюл. №1]. Основним недоліком відомого ґрунтообробного агрегату є те, що при його використанні відсутня суцільність обробки ґрунту. Це пов'язано з тим, що відстань між фланцями, на яких закріплені радіальні ножі, набагато більше, ніж сумарна ширина двох суміжних наконечників з крилами. Отже, при обробці ґрунту будуть залишатися смуги ґрунту, які не зазнали впливу від радіальних ножів. Другим істотним недоліком відомого ґрунтообробного агрегату є те, що при його експлуатації спостерігається нерівномірність обробки ґрунту по глибині. Оскільки радіальні ножі при обертанні ротаційного вала описують циклоїди, то глибина обробки ґрунту стає різною, отже, створюються нерівні умови для всхожості насіння і подальшого розвитку культур. А це, в свою чергу, приводить до нерівномірного дозрівання, що, в результаті, негативно відбивається на зборі врожаю: частина урожаю вже дозріла і його необхідно прибирати, але частина ще не дозріла. Третім конструктивним недоліком відомого ґрунтообробного агрегату є те, що в ньому у якості опорних елементів використані башмаки невеликих розмірів. Оскільки башмаки мають невелику площу, вони легко вдавлюються в ґрунт, особливо якщо він м'який, що викликає необхідність в збільшенні потужності для переміщення агрегату по полю. При цьому вертикальні стойки можуть зігнутися, що неминуче приведе до поломки агрегату. Крім того, через невелику площу опорних елементів, будуть спостерігатися значні коливання рами в процесі рушення агрегату, що ще у більшій мірі підвищує нерівномірність обробці ґрунту по глибині. Четвертим недоліком відомого ґрунтообробного агрегату є обмеженість його технологічних можливостей. Цей недолік зумовлений тим, що відомий агрегат не має можливості подрібнювати рослинні і стерньові 6 залишки, оскільки в його конструкції відсутні будьякі вузли, які могли б здійснювати таку операцію. Отже, відомий агрегат тільки лише зрізає рослини, але не подрібнює їх. Це приводить лише до поступового забруднення полів, оскільки зрізані рослини не устигають перегнити за один сезон і, нагромаджуючись з року в рік, тільки лише перешкоджають нормальному веденню польових робіт. П'ятим недоліком відомого ґрунтообробного агрегату є його низька надійність в процесі експлуатації. Цей недолік пояснюється наступним. Оскільки ротаційні ножі виготовлені з тонколистового металу, вони не володіють достатньою жорсткістю і міцністю, отже, можуть легко зігнутися при попаданні на камінь або тверду дільницю ґрунту. Шостим недоліком відомого ґрунтообробного агрегату є висока трудомісткість його обслуговування, зумовлена необхідністю зміни висоти опорних стойок ручним способом. Сьомим недоліком відомого ґрунтообробного агрегату є значно обмежений ресурс експлуатації його робочих органів, зокрема радіальних ножів, оскільки на них відсутні які-небудь зміцнюючі елементи. Оскільки ґрунт, як відомо, є хорошим абразивним матеріалом, то ножі без зносостійкого і зміцнюючого покриття будуть швидко стиратися, що обмежує їх тимчасової ресурс експлуатації. І останнім, восьмим, недоліком відомого ґрунтообробного агрегату є те, що в його конструкції відсутні вузли для вирівнювання обробленого шару ґрунту. Внаслідок цього, для планування ґрунту по всій ширині захоплення, виникає необхідність у використанням додаткових агрегатів, наприклад, дискових або ланцюгових борін, за допомогою яких необхідно здійснювати додаткову обробку ґрунту, а це, в свою чергу, підвищує тр удомісткість і вартість підготовки ланів під посів або під пари. В основу корисної моделі поставлена задача підвищення якості очищення ґрунту від рослинних і стерньових залишків і якості поверхневої обробки ґрунту за один прохід з одночасним розширенням технологічних можливостей ґрунтообробного агрегату шляхом рівномірності і суцільності зрізання поверхневого шару ґрунту з подальшим його вирівнювання по всій ширині захоплення і збільшення міри подрібнення рослинних і стерньових залишків шляхом їх багаторазового дроблення за рахунок оснащення агрегату додатковими робочими органами, що зрізають ґрунти в площині, зустрічно-направленими робочими органами, що обертаються, для мульчування і пристроєм для планування ґрунту. Рішення поставленої задачі досягається тим, що комбінований ґрунтообробний агрегат, який містить раму, що спирається на опорні елементи, які закріплені на вертикальних опорних стойках, і всередині якої розташований привод обертання, а також встановлений в поперечному напрямі ротаційний вал, на якому закріплені фланці з робочими органами, виконаними у вигляді робочих ножів, додатково забезпечений плоскорізами трикутної форми, встановленими з кутом атаки 3 7 28633 10° на вертикальних стойках на передній поперечній балці рами, і виконаних у вигляді трикутної основи з прикріпленими до неї ножами, на ріжучі кромки яких нанесене крапкове покриття у вигляді наплавлених кіл з зносостійкого матеріалу і до яких прикріплені вертикальні ножі з наплавленою суцільною зносостойкою ріжучою кромкою, що примикають до вертикальних стойок, а також, забезпечений другим додатковим ротаційним валом з робочими ножами і горизонтальною віссю обертання, пов'язаним з приводом обертання і з першим ротаційним валом за допомогою ланцюгової передачі, причому робочі ножі на першому ротаційному валі виконані у вигляді Г-подібних знімних пластин, відігнена частина яких має зміцнення і двостороннє заточування ріжучих кромок, а ножі на другому ротаційному валі виконані плоскими у вигляді прямолінійних пластин із заточуванням і зміцненням ріжучих кромок або без таких, при цьому, робочі Г-подібні ножі на першому ротаційному валі прикріплені до нього нерухомо, а робочі плоскі ножі на другому ротаційному валі прикріплені до нього шарнірно, а також, на задній поперечній балці рами встановлений пристрій для вирівнювання ґрунту, який виконано у вигляді гребінки з набору вертикальних зігнених пластин, зазори між якими відповідають максимально допустимому розміру подрібнених залишків рослинного походження і шматочків ґрунту, причому відстань між гребінкою і другим ротаційним валом вибрана такою, що плоскі ножі другого ротаційного вала входять в зазори між зігненими пластинами гребінки, а нижні кромки вертикальних зігнених пластин гребінки знаходяться на одному рівні з плоскорізами, крім того, опорні елементи виконані у вигляді лиж, а вертикальні опорні стойки виконані у вигляді гідроцилінрів, встановлених на зовнішніх боках подовжніх балок рами агрегату. Оснащення ґрунтообробного агрегату плоскорізами дозволяє здійснювати суцільне і рівномірне по глибині зрізання верхнього шару ґрунту по всій ширині захоплення, що створює однакові умови для всхожісті насіння після їх посіву. Розташування плоскорізів в ґрунті під певним кутом атаки дозволяє підіймати ґрунт і кореневі системи рослин в зону дії робочих Г-подібних ножів, що обертаються, за допомогою яких ґрунт, зокрема, грудки, розпушуються, а кореневі системи подрібнюються. Виконання робочих ножів на першому ротаційному валі у вигляді Г-подібних пластин дозволяє ріжучу кромку ножа розташовувати в горизонтальній площині і, таким чином, забезпечити максимальне захоплення стеблин рослин. Г-подібні ножі закріплені на ротаційному валі з таким кроком, що їх зігнені частини з ріжучими кромками повністю перекривають ширину захоплення, що забезпечує суцільність впливу ножами на стеблини рослинних і стерньових залишків, кореневі системи і грудки ґрунту, що, в свою чергу, забезпечує максимальну якість очищення полів і обробки (рихлення) ґрунту. 8 Наявність другого ротаційного вала з плоскими робочими зустрічно направленими ножами, що обертаються, забезпечує багаторазове розрізання на дрібні фракції рослинних і стерньових залишків, що забезпечує їх прискорену переробку мікроорганізмами і дощовими черв'яками в гумус (за один зимовий сезон), а це, в свою чергу, виключає накопичення в ґрунті неперегнилої біомаси, тобто відсутні передумови для поступового засмічення полів. Наявність гребінки на задній поперечній балці рами ґрунтообробного агрегату дозволяє збирати всі не подрібнені залишки і автоматично повертати їх в зону дії робочих ножів для повторного дроблення до необхідної фракції, а також, завдяки тому, що вертикальні пластини гребінки знаходяться частково в ґрунті, вони здійснюють вирівнювання ґрунту по ширині захоплення, створюючи сприятливі умови для подальшого посіву сільськогосподарських культур. Наявність плоскорізів, встановлених з певним кутом атаки, наявність на першому ротаційному валі робочих ножів, виконаних у вигляді Г-подібних пластин, наявність в агрегаті другого ротаційного вала з ножами, а також гребінки, в сукупності, забезпечує видалення абсолютно всіх наземних і кореневих частин рослин і стерньових залишків, гарантованого їх подрібнення і рівномірний розподіл по поверхні ґрунту, суцільну поверхневу обробку ґрунту, тобто, ґрунтообробний агрегат, що пропонується, забезпечує повне мульчування біомаси і підготовку ґрунту під сівбу або під пари за один прохід. Таким чином, запропонований ґрунтообробний агрегат є комбінованою машиною, призначеною для одночасної поверхневої обробки ґрунту, видалення і подрібнення рослинних і стерньових залишків і розрівняння мульчі і розпушеного ґрунту по всій ширині захоплення. Сутність корисної моделі пояснюється ілюструючим матеріалом, на якому зображене наступне: Фіг.1 схема запропонованого комбінованого ґрунтообробного агрегату, вигляд зверху; Фіг.2 - те ж саме, вигляд збоку в розрізі. Одинарними стрілками показаний напрям обертання ротаційних валів, подвійній - напрям рушення агрегату. Запропонований комбінований ґрунтообробний агрегат містить раму 1, на передній поперечній балці 2 якої, розташовані знімні плоскорізи 3 трикутної форми, які закріплені на нижніх торцях вертикальних стойок 4. На ріжучих кромках 5 плоскорізів 3 нанесено крапкове покриття у вигляді наплавлених кіл 6 з зносостійкого матеріалу, яке забезпечує підвищення ресурсу роботи плоскорізів 3. Оскільки плоскорізи 3 встановлені практично поруч один з одним, вони повністю перекривають ширину захоплення. Під час рушення агрегату плоскорізи 3 зрізають верхній шар ґрунту в одній площині по всій ширині захоплення, що забезпечує поверхневу обробку ґрунту за одною глибиною. Завдяки тому, що плоскорізи 3 встановлені з кутом атаки 3-10°, вони підіймають зрізаний шар ґрунту 9 28633 разом з рослинними і стерньовими залишками і кореневими системами рослин вгору. Вказаний діапазон кутів атаки (3-10°) плоскорізів 3 вибраний експериментально з наступних умов: Якщо кут атаки менше за 3°, то зрізаний шар ґрунту підіймається на недостатню висоту для подальшої його обробки. Якщо кут атаки більше за 10°, опір плоскоріза 3 рушенню зростає на стільки, що може статися його відрив від стойки або необхідно різке збільшення потужності для переміщення агрегату, що приводить до невиправданої перевитрати паливно-мастильних матеріалів. Всередині рами 1 в поперечному напрямі встановлений перший ротаційний вал 7 з горизонтальною віссю обертання 8, на зовнішній циліндричній поверхні якого закріплені на фланцях 9 робочі Г-подібні ножі 10. Основне призначення робочих Г-подібних ножів 5 полягає в зрізанні стеблин рослин і стерньових залишків і рихленні зрізаного шару ґр унту. Перший ротаційний вал 7 має наступну конструкцію. До зовнішньої циліндричної поверхні першого ротаційного вала 7 жорстко прикріплені, наприклад, приварені фланці 9. На кожному фланці 9 є чотири радіальних пази, причому два пази виконані на одній площині фланця 9, в два на протилежній його площині. На кожній площині фланця 9 пази розташовані діаметрально. У кожному пазі є не менш двох о творів для кріплення Г-подібних ножів 10 до фланця 9. В пази встановлюються Г-подібні ножі 10 таким чином, щоб зігнена частина Г-подібного ножа 10 була звернена до фланцю 9. Г-подібні ножі 10 закріпляються в пазах за допомогою болтів 11. Таким чином, на фланці 9 закріпляється чотири Гподібних ножі 10, зігнені дільниці, яких звернені один до одного. Таке розташування Г-образних ножів 10 дозволяє повністю перекрити дільницю ґрунту, що обробляється, що виключає пропуск рослин і стерньових залишків. Завдяки тому, що Гподібні ножі 10 закріплені за допомогою болтів 11, їх легко видаляти, замінювати і переставляти, коли в цьому виникає необхідність. Конструктивно Г-подібні ножі 10 виконані у вигляді металевих зігнених пластин. На вертикальній дільниці зігненої пластини є отвори для кріплення Г-подібного ножа 10 до фланця 9. Горизонтальна дільниця зігненої пластини має загострені ріжучі кромки 12, які безпосередньо взаємодіють з рослинними і стерньовими залишками і здійснюють поверхневу обробку ґрунту. Наявність горизонтальної дільниці зігненої пластини дозволяє забезпечити максимальне захоплення стеблин рослин при їх розрізанні і суцільність обробки ґрунту. На зовнішньому боку горизонтальної дільниці зігненої пластини є крайова крапкова наплавка 13 з зносостійкого матеріалу. Наплавка 13 забезпечує підвищення міцності і зносостійкості Г-подібних ножів 10. Між вертикальною і горизонтальною дільницями зігненої пластини закріплена, наприклад, приварена, перемичка 14. Наявність перемички 14 між зігненими дільницями пластин дозволяє, з одного боку, додати Г-подібному ножу 10 10 додаткову жорсткість, а з іншого - забезпечити гарантоване відкидання всіх зрізаних стеблин рослин і ґрунту за межі першого ротаційного вала 7 для подальшого їх подрібнення. Всередині рами 1, також в поперечному напрямі встановлений другий ротаційний вал 15 з горизонтальною віссю обертання 16, на зовнішній циліндричній поверхні якого встановлені шарнірно робочі плоскі ножі 17. Основне призначення робочих плоских ножів 17 полягає в подрібненні вже зрізаних стеблин рослин і стерньових залишків і в рихленні зрізаного шару ґрунту. Другий ротаційний вал 15 має наступну конструкцію. До зовнішньої циліндричної поверхні другого ротаційного вала 15 жорстко прикріплені, наприклад, приварені, провушини 18. До цих провушин 18, за допомогою шпильок 19, прикріплені плоскі ножі 17. Плоскі ножі 17 можуть вільно обертатися відносно шпильок 19. При обертанні другого ротаційного вала 15, плоскі ножі 17, під дією відцентовий сил розташовуються радіальне. Завдяки тому, що плоскі ножі 17 закріплені за допомогою шпильок, їх також легко видаляти, замінювати і переставляти, коли в цьому виникає необхідність. Конструктивно плоскі ножі 17 виконані у вигляді металевих плоских пластин. На одному кінці пластини є крізний отвір для проходу шпильки 19 для кріплення плоского ножа 17 до провушини 18. Плоскі ножі 17 також мають загострені ріжучі кромки 20 і аналогічну крайову крапкову наплавку 21 з зносостійкого матеріалу. Наплавка 21 також забезпечує підвищення міцності і зносостійкості плоских ножів 17. Кількість Г-подібних 10 і плоских 17 ножів в кожному перетині першого 7 і другому 15 ротаційних валів відповідно, може бути різною. Г-подібні 10 і плоскі 17 ножі на створюючих циліндричних поверхнях першого 7 і другого 15 ротаційних валів відповідно, можуть бути встановлені як по гвинтовій лінії, так і в шаховому порядку або паралельними рядами. Обертання першого 7 і другого 15 ротаційних валів забезпечується ланцюговою передачею 22, через конічний редуктор 23, який пов'язаний через карданний вал 24 з валом відбору потужності 25 енергонасиченого транспортного засобу (не показаний). При цьому зірочки 26 ланцюгової передачі 22 можуть мати як однаковий, так і різний діаметр, забезпечуючи або однакову, або різну швидкість обертання першого 7 і другого 15 ротаційних валів. Випробування дослідного зразка агрегату показали, що найбільш оптимальним співвідношенням діаметрів зірочок 26 є 1:1,5-2, тобто при обертанні першого ротаційного вала 7 зі швидкістю 1000об/хв, др угий ротаційний вал 15 повинен обертатися з швидкістю 1500-2000об/хв. Подальше збільшення швидкості обертання другого ротаційного вала 15 недоцільне: якісних змін в подрібненні рослинної біомаси і рихлення ґрунту не спостерігається, а знос частин, що обертаються, зростає, що знижує ресурс роботи ґрунтообробного агрегату загалом. На задній поперечній балці 27 рами 1 встановлена гребінка 28, яка виконана у вигляді 11 28633 набору вертикальних зігнених металевих пластин, зазори між якими відповідають максимально допустимому розміру подрібнених залишків рослинного походження і шматочкам розпушеного ґрунту. Гребінка 28 наближена до другого ротаційного вала 15 настільки, що плоскі ножі 17 проходять через зазори між вертикальними зігненими металевими пластинами гребінки 28. Якщо рослинні і стерньові залишки подрібнені і ґрунт в доста тній мірі, то вони вільно проходять крізь зазори в пластинах гребінки 28, а якщо ні - то вони застряють в гребінці 28, звідки витягуються плоскими ножами, що обертаються 17 і зазнають подальшого повторного подрібнення до заданого розміру. Довжина вертикальних зігнених пластин гребінки 28 вибирається такою, щоб їх нижні кромки знаходяться на одному рівні з плоскорізами 3. Вертикально зігнені пластини гребінки 28 також можуть мати загострені ріжучі кромки і зміцнюючу наплавку. На зовнішніх боках подовжніх балок 29 рами 1 встановлені регульовані по висоті опорні лижі 30 на вертикальних стойках 31, у якості яких використані гідроциліндри. Використання лиж 30 для підтримки рами 1 на заданому рівні над поверхнею ґрунту дозволяє значно збільшити площу опори (в порівнянні з колесами, що традиційно використовуються для цієї ж мети, або башмакими, як у прототипі), отже, знизити питомий тиск агрегату на ґрунт, підвищити його стійкість і, одночасно, знизити коливання рами 1 через локальні нерівності опорної поверхні (ґрунту). Виконання вертикальних стойок 31 у вигляді гідроциліндрів дозволяє регулювати висоту розташування рами 1 над ґрунтом, і, таким чином, регулювати глибину поверхневої обробки ґрунту плоскорізами 3. Можливість зміни глибини обробки ґрунту розширює те хнічні можливості запропонованого комбінованого ґрунтообробного агрегату. Подальша сутність корисної моделі пояснюється спільно з принципом роботи запропонованого комбінованого ґрунтообробного агрегату. Перед початком сільськогосподарських робіт, комбінований ґрунтообробний агрегат розташовують в загороді. При цьому штоки 32 гідроциліндрів повністю висунені. У цьому положенні штоків 32 гідроциліндрів, рама 1 знаходиться на максимальній висоті, а робочі Гподібні 10 і плоскі ножі 17 знаходяться над поверхнею ґрунту. Після включення приводу обертання, перший 7 і другий 15 ротаційні вали починають обертатися в один і той же ж бік, але з різною швидкістю (варіант, коли зірочки 26 ланцюгового приводу 22 ротаційних валів 7 і 15 мають різний діаметр). Одночасно з включенням приводу обертання, агрегат починають переміщувати по дільниці поля, що обробляється, за допомогою енергонасиченого транспортного засобу (не показаний). Одночасно з початком рушення агрегату, починають опускати раму 1 за допомогою гідроциліндрів шляхом зменшення довжини висунених штоків 32. При 12 цьому плоскорізи 3 занурюються в ґрунт і зрізають його верхній шар. Завдяки тому, що плоскорізи встановлені під певним кутом атаки, зрізаний шар ґрунту, разом з кореневими системами, рослинними і стерньовими залишками підіймаються вгору по площині плоскоріза і попадають в зону дії Г-подібних ножів 10 першого ротаційного вала 7, що обертаються, які їх частково руйнують ріжучими кромками 12, рихлять ґрунт і, одночасно, ріжуть в ньому кореневі системи рослин. Зрізані наземні частини рослин і витягнуті з ґрунту частини кореневих систем за допомогою перемичок 14 перекидаються на другий ротаційний вал 15, де вони попадають під плоскі ножі 17, які обертаються у зустрічному напрямі і яких їх разрубають на дрібні фракції своїми ріжучими кромками 20. Дрібні шматочки біомаси далі попадають в гребінку 28, яка затримує великі фракції рослин і кореневих систем і великі шматки ґрунту, а дрібні проходять крізь зазори між пластинами. Завдяки тому, що плоскі ножі 17 заходять в зазори між пластинами гребінки 28, вони витягують великі фракції рослин і грудки ґрунту і знову впливають на них ударним навантаженням, подрібнюючи їх до необхідних розмірів. Оскільки нижні кромки вертикальних зігнених пластин гребінки 28 знаходяться на одному рівні з плоскорізами 3, то вони розташовуються у розпушеному ґрунті і автоматично розрівнюють і розподіляють його рівномірно по всій ширині захоплення в процесі рушення ґрунтообробного агрегату. Глибину обробки ґрунту регулюють шля хом зміни положення штоків 32 гідроциліндрів. При зносі однієї з ріжучих кромок 12 і 20 Гподібних 10 і плоских 17 ножів відповідно, ці ножі переустановлюють іншим боком і використовують далі, до повного зносу др угої ріжучої кромки 12 і 20. Така перестановка можлива завдяки тому, що на кожному Г-подібному 10 і плоскому 17 ножі є по дві заточені ріжучі кромки. Істотна відмінність об'єкта корисної моделі, що заявляється, від раніше відомих, полягає в тому, що комбінований ґрунтообробний агрегат оснащений плоскорізами, встановленими під певним кутом атаки, другим ротаційним валом, забезпечений гребінкою, а на кожному ротаційному валі використані різні типи ножів і різні типи їх кріплення: на першому валі - Г-подібні нерухомі ножі, а на другому валі - жваві подрібнюючі плоскі ножі, при цьому, Г-подібні ножі першого ротаційного вала при обертанні опиняються поруч із задньою частиною плоскорізів і дроблять ґрунт, а вертикальні пластини гребінки розрівнюють ґрунт. Вказані відмінності, в сукупності, дозволяють отримати новий принцип очищення і підготовки: перші (по ходу рушення агрегату) плоскорізи зрізають шар ґрунту, ножі рихлять і подрібнюють ґрунт і рослинні і стерньові залишки, а гребінка контролює якість подрібнення біомаси, не пропускаючи великі фракції, і рівномірно розподіляє мульчу і ґрунт по всій ширині захоплення. Жоден з відомих агрегатів не може володіти зазначеними властивостями, 13 28633 оскільки містять або усього один горизонтальний барабан в ріжучими ножами, що не дозволяє багато разів впливати на рослинні і стерньові залишки, отже, не вдається розрізати біомасу на дрібні фракції, або мають ланцюгові робочі органи, які, в суті, не дозволяють розрізати рослини, а тільки лише їх збивати або висмикувати, або оснащені додатково дисковими шлейфами і дисковими боронами, але при цьому відсутні в конструкції мульчуровальники. При використанні відомих пристроїв, розміри частин видалених і стерньових залишків залишаються настільки великими (солому взагалі не розрізають), що вони перегнивають протягом 3-4 років, нагромаджуючись з року в рік, засмічують ґрунт і перешкоджаючи здійсненню подальших польових робіт, особливо посівних. Запропонований же агрегат дозволяє відмовитися від використання додаткового пристосування, такого як борони і шлейфи. До технічних переваг запропонованого технічного рішення, в порівнянні з прототипом, можна віднести наступне: - висока ефективність видалення рослинних і стерньових залишків за рахунок того, що плоскорізи і зігнені горизонтальні дільниці Гподібних ножів повністю перекривають дільницю поля, що обробляється, по всій ширині захоплення; - висока ефективність поверхневої обробки ґрунту за рахунок того, що вер хній шар ґрунту зрізається плоскорізами повністю; - можливість регулювання глибини обробки ґрунту за рахунок того, сто як стойки використані гідроциліндри; - рівномірність глибини обробки ґрунту по ширині захоплення за рахунок того, що збільшена площа опорної поверхні завдяки використанню лиж; - висока ефективність подрібнення рослинних і стерньових залишків за рахунок наявність другого ротаційного вала з плоскими ножами; - розширення технологічних можливостей за рахунок автоматичного контролю розмірів подрібнених часток рослинних і стерньових залишків та ґрунту гребінкою; - можливість вирівнювання ґрунту по всій ширині захоплення за рахунок того, що нижні частини зігнених пластин гребінки входять в ґрунт; - збільшення терміну експлуатації за рахунок наявності двох ріжучих кромок на кожному ножі і зносостійких зміцнюючих наплавок на ріжучих кромках робочих органів (ножах); - висока ремонтопридатність за рахунок модульності конструкції і за рахунок того, що всі ножі і плоскорізи виконані знімними; - відсутність другого приводу для обертання другого ротаційного вала за рахунок використання ланцюгової передачі; - простота виготовлення і експлуатації: в конструкції відсутні будь-які вузли або деталі, що вимагають спеціального обладнання або високої кваліфікації для виготовлення. До соціальних переваг запропонованого технічного рішення, в порівнянні з прототипом, 14 можна віднести високу якість поверхневої обробки ґрунту з одночасною високою якістю очищення ланів за рахунок подрібнення рослинних і стерньових залишків на досить дрібні фракції, що сприяє прискореному їх розкладанню в ґрунті (за один зимовий сезон), тим самим, збільшуючи родючість сільськогосподарських угідь. Економічний ефект від впровадження корисної моделі, в порівнянні з використанням прототипу, отримують за рахунок зниження вартості агрегату, підвищення врожайності сільськогосподарських культур, економії коштів і часу за рахунок поєднання операцій поверхневої обробки ґрунту, очищення від рослинних і стерньових залишків і вирівнювання ґрунту по всій ширині захоплення.
ДивитисяДодаткова інформація
Автори англійськоюZelinskyi Mykola Zdislavovych
Автори російськоюЗелинский Николай Здиславович
МПК / Мітки
МПК: A01D 82/00
Мітки: комбінований, грунтообробний, агрегат
Код посилання
<a href="https://ua.patents.su/7-28633-kombinovanijj-gruntoobrobnijj-agregat.html" target="_blank" rel="follow" title="База патентів України">Комбінований грунтообробний агрегат</a>
Комбінований грунтообробний агрегат
Номер патенту: 60879
Опубліковано: 15.10.2003
Автори: Лапенко Григорій Олександрович, Назаренко Олексій Олексійович, Тесленко Леонід Іванович, Падалка Вячеслав Вікторович, Ярошенко Петро Павлович, Антонець Семен Сверидонович, Писаренко Віктор Микитович, Хейло Михайло Іванович, Арендаренко Володимир Миколайович
МПК: A01B 49/02
Мітки: агрегат, комбінований, грунтообробний
Формула / Реферат:
1. Комбінований ґрунтообробний агрегат, що містить основну раму, передні колеса з першим регулятором глибини обробітку ґрунту та задні транспортні колеса, зв'язані з основною рамою, щонайменше одну раму робочих органів та жорстко змонтовані на них робочі органи, який відрізняється тим, що щонайменше одна рама робочих органів підвішена до основної рами в трьох точках на продовженій осі коливання щонайменше одного вирівнювача поверхні ґрунту,...
Комбінований грунтообробний посівний агрегат

Номер патенту: 15574
Опубліковано: 17.07.2006
Автори: Романенко Михайло Пилипович, Білоткач Михайло Петрович, Зирянов Володимир Олексійович, Шквира Андрій Степанович, Бойченко Сергій Федорович
МПК: A01B 49/00
Мітки: агрегат, грунтообробний, посівний, комбінований
Формула / Реферат:
Комбінований ґрунтообробний посівний агрегат, який містить посівну та ґрунтообробну частину, яка має фрезерні робочі органи з вертикальною віссю обертання і вирівнювальний ущільнювальний коток, приєднану до начіпного пристрою трактора, а посівна частина за допомогою окремої паралелограмної зчіпки з’єднана з ґрунтообробною частиною агрегата, зчіпка має подвійні верхні та нижні поздовжні тяги, а також - перемички для з’єднання їх між собою, а...
Комбінований агрегат для основного обробітку грунту
Номер патенту: 63825
Опубліковано: 15.01.2004
Автор: Гузь Віталій Григорович
МПК: A01B 49/06
Мітки: основного, агрегат, обробітку, комбінований, грунту
Формула / Реферат:
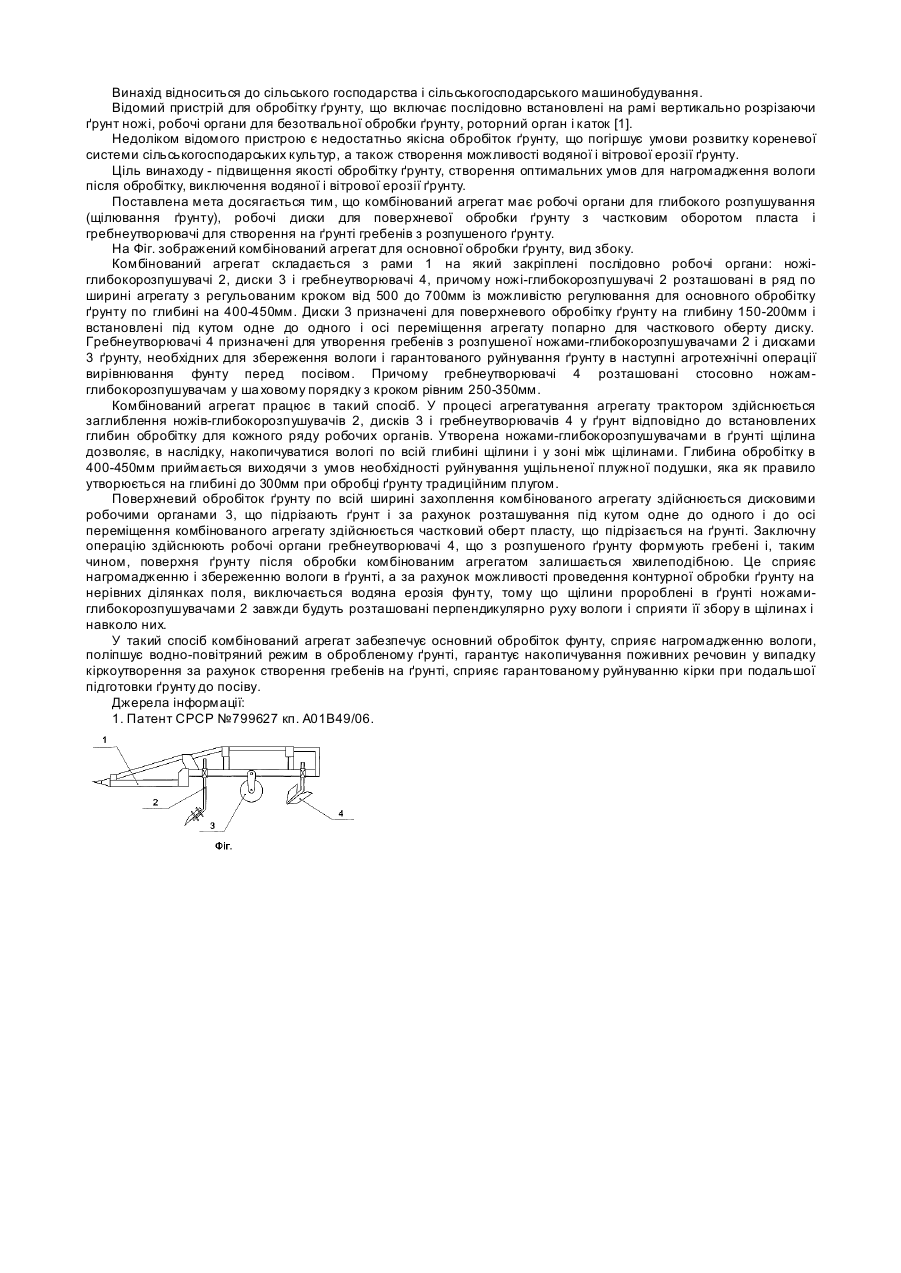
Комбінований агрегат для основного обробітку ґрунту, що включає послідовно встановлені робочі органи у вигляді ножів, що розрізають ґрунт, диски і гребенеутворювачі, який відрізняється тим, що ножі-глибокорозпушувачі встановлені по ширині агрегату з кроком 500-700 мм і з можливістю регулювання заглиблення в ґрунт на глибину 400-450 мм, робочі диски закріплені на осях під кутом один до одного і щодо осі переміщення агрегату з можливістю...
Грунтообробний агрегат
Номер патенту: 9591
Опубліковано: 17.10.2005
Автори: Сало Василь Михайлович, Лузан Петро Григорович, Воротнюк Валентин Володимирович, Сисолін Петро Васильович, Шмат Сергій Іванович
МПК: A01B 13/00, A01B 71/00
Мітки: агрегат, грунтообробний
Формула / Реферат:
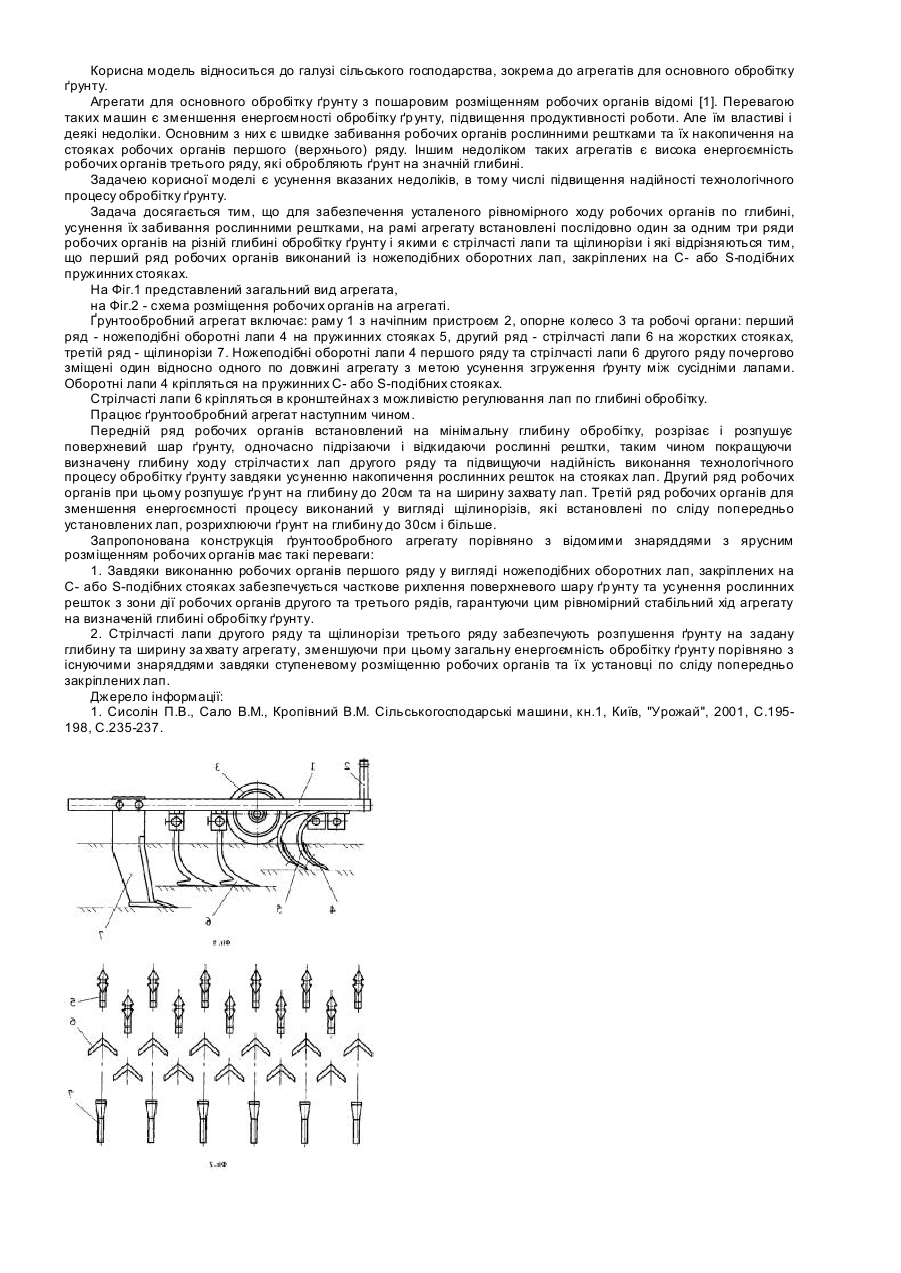
Ґрунтообробний агрегат, що включає раму та закріплені на ній три ряди робочих органів, встановлених послідовно один за одним на різній глибині обробітку ґрунту і виконаних у вигляді стрілчастих лап, та щілинорізи, який відрізняється тим, що перший ряд робочих органів виконаний із ножеподібних оборотних лап, закріплених на С- або S-подібних пружинних стояках.
Грунтообробний агрегат
Номер патенту: 72047
Опубліковано: 17.01.2005
Автори: Олійник Олександр Анатолійович, Кучеренко Тамара Іванівна, Мельничук Наталія Михайлівна
МПК: A01B 5/00
Мітки: агрегат, грунтообробний
Формула / Реферат:
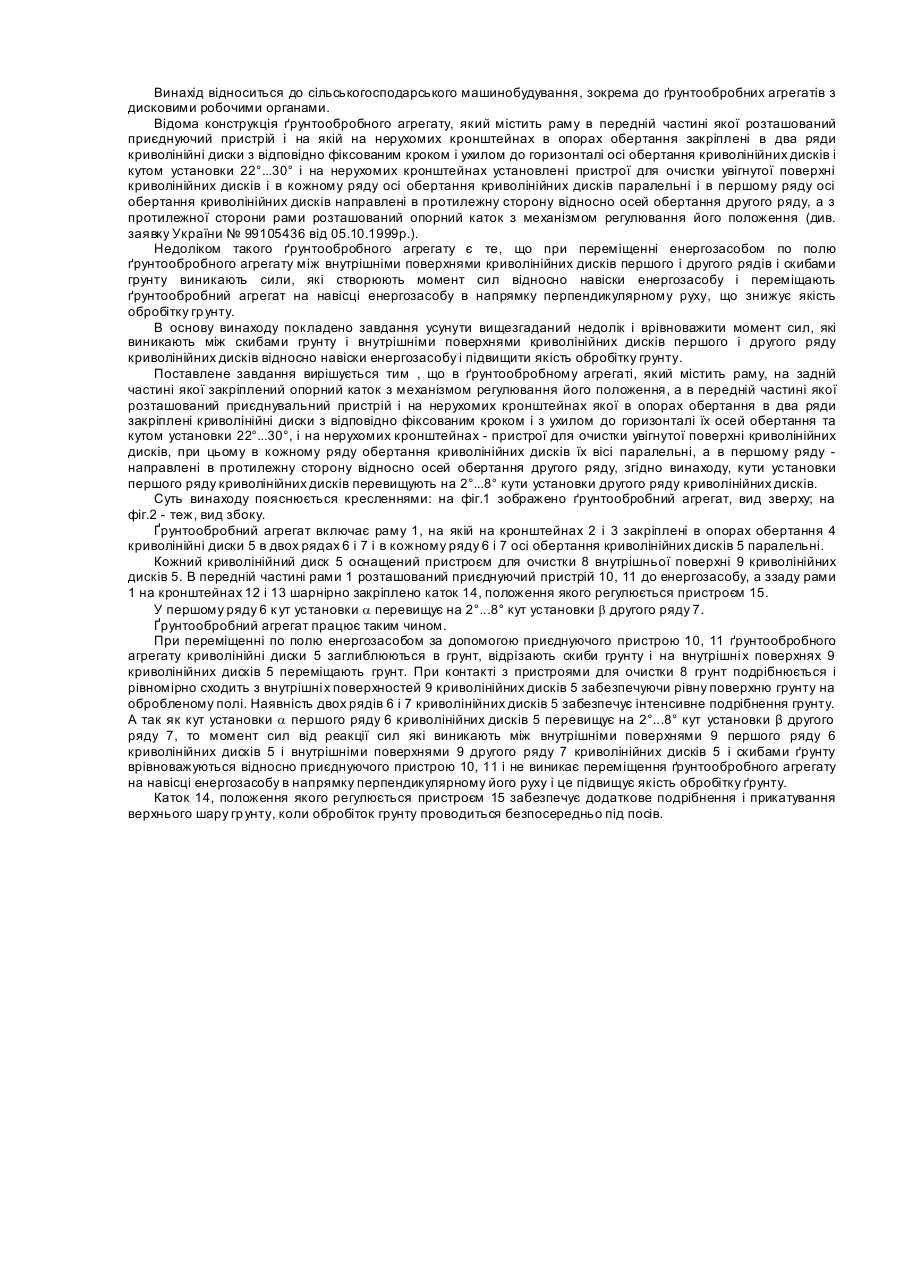
Ґрунтообробний агрегат, який містить раму, на задній частині якої закріплений опорний каток з механізмом регулювання його положення, а в передній частині якої розташований приєднувальний пристрій і на нерухомих кронштейнах якої в опорах обертання в два ряди закріплені криволінійні диски з відповідно фіксованим кроком і з ухилом до горизонталі їх осей обертання під кутом установки 22°...30°, і на нерухомих кронштейнах - пристрої для очистки...
Попередній патент: Рукавна оболонка з матовою поверхнею для упакування харчових продуктів
Наступний патент: Експериментально-навчальна установка для коптіння ковбас і м’ясних виробів
Випадковий патент: Спосіб отримання гідроксосульфатів міді і мідні фунгіцидні композиції, що містять їх