Зубчаста передача з точковою і чотирипарною системою зачеплення зубів
Номер патенту: 35343
Опубліковано: 10.09.2008

Формула / Реферат
Зубчаста передача, що містить тривінцеві шестерні і колеса з поверненими один відносно одного в обводовому напрямку на певні кути вінцями шестірні і колеса з розташованими на них евольвентними зубами, що знаходяться між собою в зачепленні, яка відрізняється тим, що шестірня і колесо виконані складеними із чотирьох вінців, причому довжина кожного з вінців, відділених один від одного трьома кільцевими канавками шириною кожної з них с=8...12 мм і глибиною t=(2,7... 3,2)m, дорівнює b=(bw-3c)/4, крім того, другі, треті і четверті вінці шестірні і колеса повернені в обводовому напрямку відносно перших вінців шестірні і колеса на кути відповідно j12, j13, j14 i j22, j23, j24, при цьому твірні бічні поверхні зубів шестірні є криволінійними з радіусом кривизни R=b2/8DS, а вираження кутів j12, j13, j14 i j22, j23, j24 визначаються по формулах:



де

![]() - радіуси кривизни бічних профілів зубів у точках контакту а, с і k; aw=m(z1+z2)/2 - міжосьова відстань; r1=mz1sinaw/2; r2=mz1sinaw/2 - радіуси кривизни бічних профілів зубів у полюсі зачеплення; r1=mz1/2; r2=mz2/2 - радіуси ділильних окружностей шестірні і колеса;
- радіуси кривизни бічних профілів зубів у точках контакту а, с і k; aw=m(z1+z2)/2 - міжосьова відстань; r1=mz1sinaw/2; r2=mz1sinaw/2 - радіуси кривизни бічних профілів зубів у полюсі зачеплення; r1=mz1/2; r2=mz2/2 - радіуси ділильних окружностей шестірні і колеса; ![]() ;
; ![]() - радіуси окружностей вершин шестірні і колеса;
- радіуси окружностей вершин шестірні і колеса; ![]() ;
; ![]() - радіуси основних окружностей шестірні і колеса; z1, z2 - числа зубів шестірні і колеса; m - модуль зачеплення; aw - кут зачеплення; bw - ширина шестірні (колеса); DS=0,005...0,01 мм - параметр криволінійності твірних бічних поверхонь зубів шестірні в торцевих перерізах.
- радіуси основних окружностей шестірні і колеса; z1, z2 - числа зубів шестірні і колеса; m - модуль зачеплення; aw - кут зачеплення; bw - ширина шестірні (колеса); DS=0,005...0,01 мм - параметр криволінійності твірних бічних поверхонь зубів шестірні в торцевих перерізах.
Текст
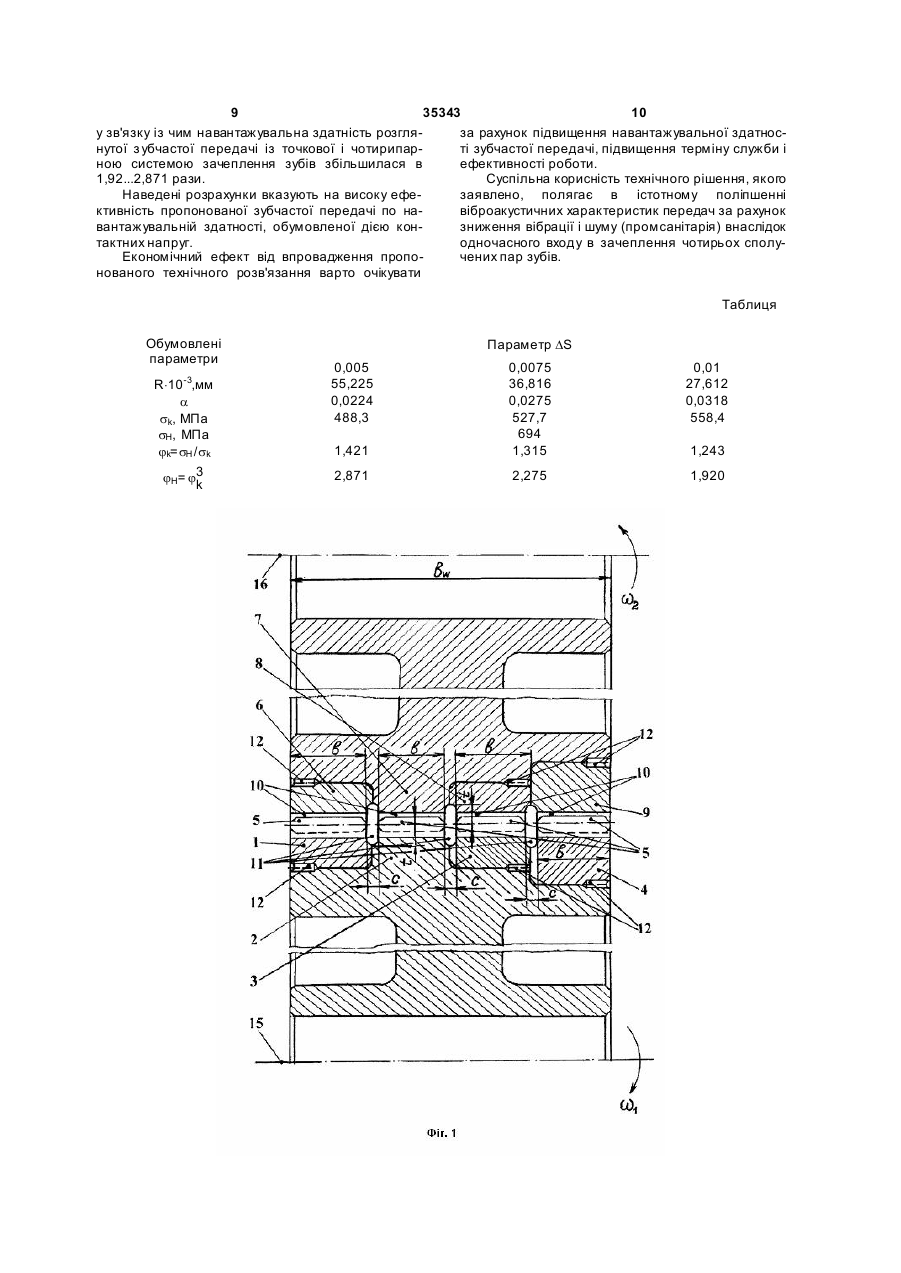
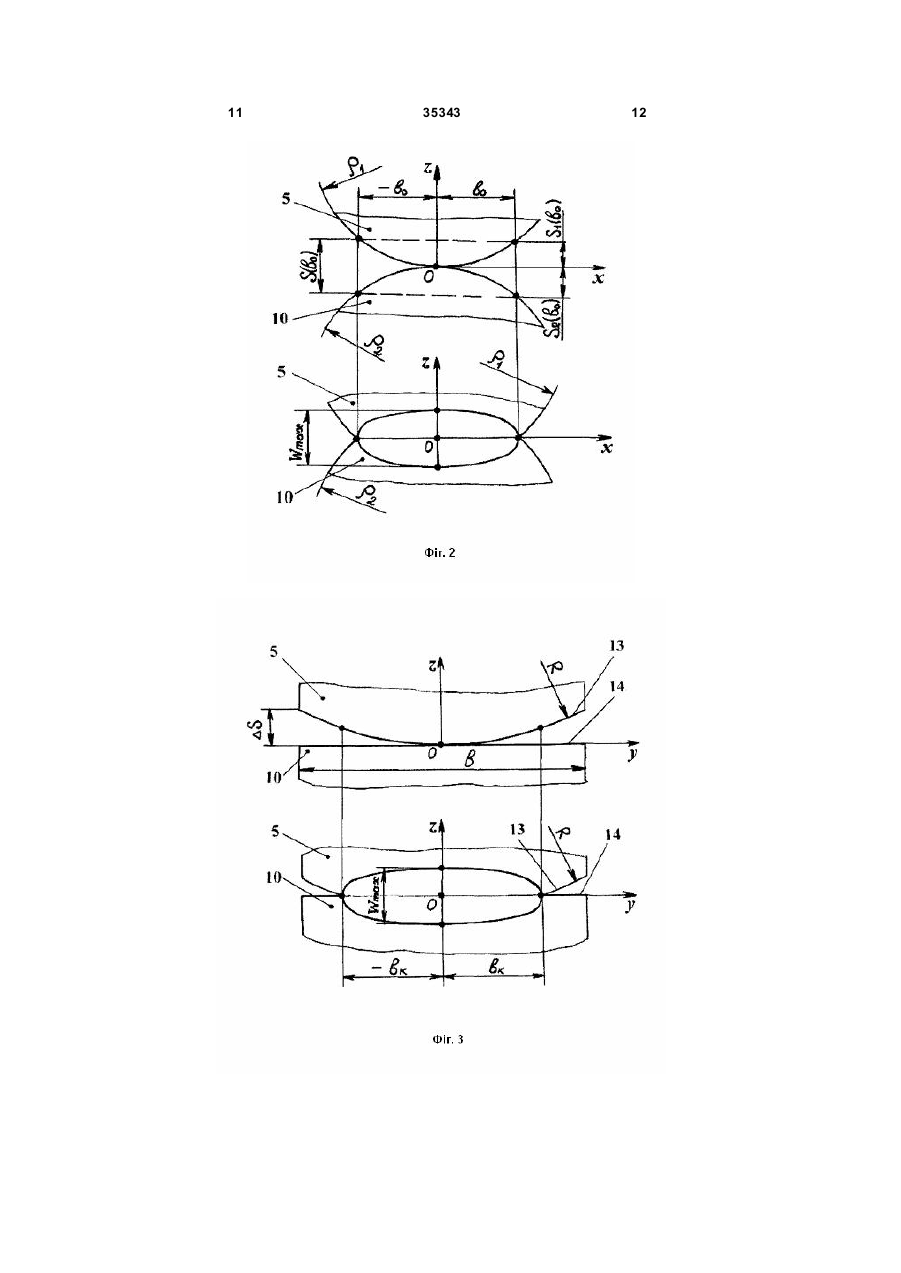
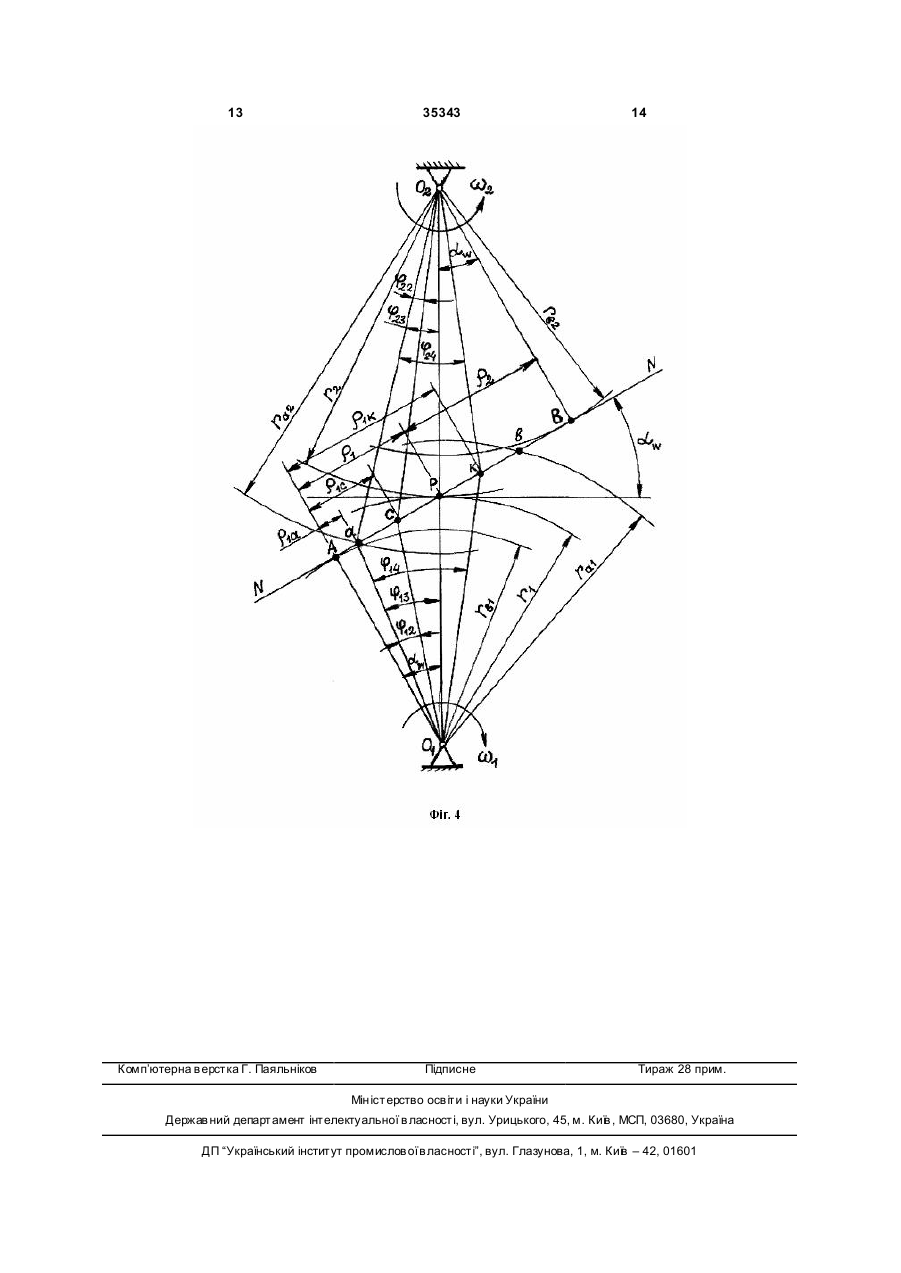
Зубчаста передача, що містить тривінцеві шестерні і колеса з поверненими один відносно одного в обводовому напрямку на певні кути вінцями шестірні і колеса з розташованими на них евольвентними зубами, що знаходяться між собою в зачепленні, яка відрізняється тим, що шестірня і колесо виконані складеними із чотирьох вінців, причому довжина кожного з вінців, відділених один від одного трьома кільцевими канавками шириною кожної з них с=8...12 мм і глибиною t=(2,7... 3,2)m, дорівнює b=(bw-3c)/4, крім того, другі, треті і четверті вінці шестірні і колеса повернені в обводовому напрямку відносно перших вінців шестірні і колеса на кути відповідно j12, j13, j14 i j22, j 23, j 24, при цьому твірні бічні поверхні зубів шестірні є криволінійними з радіусом кривизни R=b2/8DS, а вираження кутів j12, j13, j14 i j22, j 23, j24 визначаються по формулах: r2 + r1a r1c b1 j12 = arccos ; ær 2 + r2 öær 2 + r2 ö ç b1 1a ÷ ç b1 1c ÷ è øè ø 2 двовінцевих шестірні і колеса з розташованими на них евольвентними зубами, які шляхом взаємодії між собою здійснюють передачу обертання і навантаження від одних валів іншим валам машин і 3 35343 4 механізмів [1]: [Патент №81008 на винахід. Україде на. Зубчаста передача Попова О.П. з точковою й æ ö r1a = a w sin aw - r 2 - r 2 , r1c = r1a + ç r 2 - r 2 + r 2 - r 2 - aw sin a w ÷ / 4, ç ÷ a2 b 2 a1 b1 a2 b2 двопарною системою зачеплення евольвентних è ø зубів / Попов О.П. - а.200507850; Заявл. 08.08.05; Опубл. 26.11.07. Бюл.№19]. Недоліком зазначеної зубчастої передачі є æ 2 ö 2 2 2 r1k = r1 + ç ra1 - rb1 + ra2 - rb2 - aw sina w ÷ / 4 підвищений шум і вібрація, обумовлені одночасç ÷ è ø ним входом у зачеплення не більше двох сполучерадіуси кривизни бічних профілів зубів у точках них пар зубів шестірні й колеса. контакту а, с и k; a w=m(z1+z2)/2 - міжосьова відНайбільш близьким по технічній суті до пропостань; r 1=mz1sina w/2; r 2=mz1sina w/2 - радіуси кринованого рішення є зубчаста передача, що склавизни бічних профілів зубів у полюсі зачеплення; дається із трьохвінцевих шестірні і колеса з повеr1=mz1/2; r2=mz2/2 - радіуси ділильних окружностей рненими відносно один одного в окружному напрямку на певні кути вінцями шестірні і колеса з шестірні і колеса; ra 1 = m(z1 + 2 ) / 2 ; розташованими на них евольвентними зубами, що ra = m(z2 + 2 ) / 2 - радіуси окружностей вершин перебувають між собою в зачепленні [2]: [Патент 2 №29616 на корисну модель. Україна. Зубчаста шестірні і колеса; rb1 = mz1 cos a w / 2 ; передача / Попов О.П. - U200706154; Заявл. rb2 = mz2 cos a w / 2 - радіуси основних окружнос04.06.07.; Опубл. 25.01.08. Бюл.№2]. Завдання корисної моделі - зниження шуму і тей шестірні і колеса; m - модуль зачеплення; z1 , вібрації, істотне поліпшення ефективності передаz2 - числа з убів шестірні і колеса; a w - кут зачепчі. лення; bw - ширина шестірні (колеса); Для розв'язання задачі в зубчастій передачі, DS=0,005...0,01мм – параметр криволінійності що складається із трьохвінцевих шестірні і колеса утворюючих бічних поверхонь зубів шестірні в тоз поверненими відносно один одного в окружному рцевих перетинах. напрямку на певні кути вінцями шестірні і колеса з Порівняння із найближчим аналогом показує, розташованими на них евольвентними зубами, що зубчаста передача, яку заявлено, з точкової шестірня і колесо виконані складеними з чотирьох чотирипарною системою зачеплення зубів відрізвінців, причому довжина кожного з вінців, відділеняється тим, що шестірня і колесо, якi виконані за них один від одного трьома кільцевими канавками цією системою, складаються із чотирьох вінців, шириною кожної з них с=8...12мм глибиною причому довжина кожного з вінців, відділених один t=(2,7...3,2)m, дорівнює b=(bw-3c)/4. Крім того, друвід одного трьома кільцевими канавками шириною гі, треті й четверті вінці шестірні і колеса повернені кожної з с=8...12мм них t=(2,7...3,2)m, глибиною , в окружному напрямку щодо перших вінців шестірb=(bw-3с)/4 дорівнює , і крім того, другі, треті і четні й колеса на кути відповідно j12, j13 , j14 i j22, j 23, верті вінці шестірні і колеса повернені в окружному j24, при цьому утворюючих бічних поверхонь зубів напрямку щодо перших вінців шестірні і колеса на шестірні є криволінійними з радіусом кривизни кути відповідно j12, j 13, j 14 і j22=j12/U, j23=j 13/U, R=b2/8DS, а вираження кутів j12, j13, j14 i j22, j 23, j24=j 14 /U, при цьому утворюючих бічних поверхонь j24, визначаються за формулами: зубів шестірні є криволінійними з радіусом кривизни R=b2/8DS, а вираження кутів j 12 , j 13 , j 14 визна2 +r r rb1 1a 1c чаються по отриманих формулах, де m - модуль j12 = arccos ; зачеплення; bw – ширина шестірні (колеса); U=z2/z1 ær 2 + r2 öær 2 + r2 ö ç b1 1a ÷ç b1 1c ÷ – передатне відношення; DS=0,005...0,01мм - паè øè ø раметр криволінійності утворюючих бічних повер2 2 rb1 + r1 - r1(r1 - 2r1a ) хонь зубів шестірні в торцевих перетинах. j13 = arccos ; На Фіг.1 зображена чотиривінцева одноступін2r1 r 2 + r2 часта зубчаста передача, на Фіг.2 і 3 - розрахункоb1 1a ві моделі контакту сполученої пари зубів до наван2 таження і після навантаження в площинах zOx і rb1 + r1ar1 k j14 = arccos ; zOy, а на Фіг.4 - розрахункова схема зачеплення æ r2 + r2 öær 2 + r2 ö зубів. Відповідно до Фіг.1-4 маємо наступні познаç b1 1a ÷ç b1 1k ÷ è øè ø чення: w1, w2 - кутові швидкості шестірні і колеса; с 2 + (r + r - r )2 + (r + r - r )2 - (r - r )2 - ширина кільцевої канавки; t - глибина кільцевої 2r 1 2 1a 1 2 1c 1c 1a j22 arccos b 2 ; канавки; bw - ширина шестірні (колеса); b - довжи2 ér 2 + (r1 + r 2 - r1a )2 ù ér 2 + (r1 + r2 - r1c )2 ù на зубів кожного з вінців; r 1, r 2 - радіуси кривизни ê b2 ú ê b2 ú ë ûë û бічних профілів зубів шестірні і колеса в полюсі 2 зачеплення; b0, bк - мала і більша півосі еліптичної 2 + r 2 + (r + r - r )2 - æ r - r2 ö r ç 1 1a ÷ 1 2 1a площадки контакту; S1(b 0), S 2(b0), S(b0) - пружні b2 2 è ø ; j23 arccos переміщення відповідно зуба шестірні, зуба колеса 2 2r1 r 2 + r1a і сумарне переміщення зазначених зубів, Wmax b1 максимальна величина контактної деформації 2 2rb2 + (r1 + r2 - r1a )2 + (a w sin a w - r1k )2 - (rk - r1a )2 сполученої пари зубів; r 1а, r 1с , r 1k - радіуси кривиj24 arccos ; зни бічних профілів зубів першого, другого і четвеér 2 + (r + r - r )2 ù ér2 + (a sin a - r )2 ù 2 ê b2 1 2 1a ú ê b 2 w w 1k ú ртого вінців шестірні в точках контакту а, с, k із ë ûë û зубами відповідних вінців колеса; r1, r2 - радіуси 5 35343 6 ділильних окружностей шестірні і колеса; rb1, r b2 шестірні визначені з обліком того, що відрізки ас, радіуси основних окружностей шестірні і колеса; cр, рk і kb, узяті на лінії зачеплення NN, рівні один rа1, r а2 - раді уси окружностей вершин шестірні і одному, тобто ac=cp=pk=kb=ab/4 , де ab - теоретиколеса; R - радіус кривизни утворюючих бічних чна довжина лінії зачеплення. Сказане ставиться поверхонь зубів шестірні в торцевих перетинах; ідо визначення кутів j 22, j23, j 24, які характеризуNN - лінія зачеплення; АВ - теоретична довжина ють поворот другого, третього і четвертого вінців лінії зачеплення; аb - робоча довжина лінії зачепколеса в окружному напрямку щодо першого вінця колеса. лення; р - полюс зачеплення; a w - кут зачеплення; Зазначене розташування вінців шестірні і коj12, j 13 , j14 i j22 , j23 , j24 - кути повороту други х, леса приводить, як вже вказувалося, до того, що в третіх і четверти х вінців відповідно шестірні і колезачепленні бере участь одночасно чотири сполуса; О1, О2 - центри обертання осей шестірні і колечені пари зубів, у зв'язку із чим пропонована зуса; O1O2 = aw - міжосьова відстань. бчаста передача є зубчастою передачею із чотиЗубчаста передача складається із шестірні, що рипарним зачепленням зубів. При цьому на кожну складається з вінців 1,2, 3 і 4 із розташованими на із чотирьох сполучених пар зубів діє лише четверних зубами 5, а також із колеса з вінцями 6, 7, 8 і 9 та частина нормальної сили Fn, тобто Fn/4 , за умота розміщеними на них зубами 10. ви абсолютної точності виготовлення зубчастих Вінці шестірні, як і вінці колеса, довжина кожколіс і однакової твердості сполучених пар зубів. ного з яких дорівнює b, відділений друг від друга У дійсності, з урахуванням помилок виготовкільцевими канавками 11 шириною с і глибиною t. лення чотиривінцевих шестірні і колеса і неоднаПри цьому вінці 1, 3 і 4, як і вінці 6, 7 і 8, з'єднані кової твердості зачеплення зубів при розрахунках відповідно із шестірнею і колесом за допомогою варто виходити не з Fn/4, а з k3 Fn/4, де натягу і шти фтів 12. k=1,05...1...1,1 - коефіцієнт нерівномірності розпоДля забезпечення натягу збірні вінці шестірні і ділу навантаження між зубами вінців шестірні і колеса нагрівають до температури 220...260°, а колеса. потім по циліндричних поверхнях здійснюють їхній При відсутності навантаження початковий конмонтаж із шестірнею і колесом. Перед зборкою такт зубів у точках а, с, р, k є крапковим внаслідок вінців циліндричні посадкові поверхні шестірні і наявності криволінійних утворюючих бічних поверколеса покриваються тонким шаром міді. хонь зубів шестірні, у зв'язку із чим розглянута Криволінійних утворюючи х 13 бічних поверзубчаста передача характеризується просторовим хонь 5 зубів 5 вінців шестірні являють собою дуги точковим зачепленням. При навантаженні зубів окружності, проведені радіусом R. Утворюючих 14 зазначені точки контакту переходять у чотири бічних поверхонь зубів 10 вінців колеса є прямоліплощадки контакту еліптичної форми з розміром нійними. Горизонтальні лінії 15 і 16 є осями оберкожної з них pbobk, де bо, bk - мала і більша півосі тання шестірні і колеса. еліпса. Криволінійні утворюючих бічних поверхонь зуЗнаходження в зачепленні одночасно чотибів доцільно використати на зубчастому колесі з рьох сполучених пар зубів приводить у процесі меншим числом зубів, тобто на шестірні, що дороботи передачі до більше плавного і ненаголозволяє, у порівнянні з колесом, знизити витрати на шеного входу і ви ходу з убів із зачеплення. При виготовлення, і зменшити час технологічного процьому внаслідок зниження вібрації і шум у поліпцесу. шуються виброакустичні характеристики зубчастої Зубчаста передача працює в такий спосіб. передачі. При обертанні двигуна, приєднаного через вал Необхідно також відзначити, що наявність до шестірні, що складається із чотирьох вінців, трьох кільцевих канавок у зубчастих колесах привідділених друг від друга трьома кільцевими канаводить до більше інтенсивного охолодження зубів вками, зазначена шестірня здобуває кутову швиді ефективному відводу тепла із зони їхнього контакість w1. При цьому евольвентні зуби, розміщені на кту. вінцях шестірні, впливають на аналогічні зуби вінУ процесі обертання зубчастих коліс першої ців колеса, у зв'язку із чим воно починає обертативийде із зачеплення (точка b) сполучена пара зуся з кутовою швидкістю w2, сприймаючи передане бів 5 і 10, що належить четвертим вінцям 4 і 9 шенавантаження. стірні і колеса. При виході із зачеплення зазначеВнаслідок повороту в окружному напрямку ної пари зубів точка контакту к перейде у другого 2, третього 3 і четвертого 4 вінців шестірні положення точки b. При цьому точки, що залишищодо першого вінця 1 шестірні, а також другого 7, лися, контакту а, с і р, сполучених пар зубів пертретього 8 і четвертого 9 вінців колеса в окружношого, др угого і третього вінців шестірні і колеса му напрямку щодо першого вінця 6 колеcа на кути займуть положення точок с, р і k. відповідно j12, j13, j 14 і j22, j 23 , j 24 у зачепленні в Замість вибулої пари зубів четверти х вінців процесі роботи одночасно беруть участь чотири шестірні і колеса в зачеплення ввійдуть наступні сполучені пари зубів 1 і 6, 2 і 7, 3 і 8, 4 і 9. зуби зазначених вінців, у зв'язку із чим буде збеПри цьому зуби 5 і 10 перших вінців шестірні і режена наявність чотирьох сполучених пар зубів. колеса контактують у крапці а, зуби 5 і 10 других Наступної вийде із зачеплення сполучена пара вінців шестірні і колеса - у точці с , зуби 5 і 10 трезубів треті х вінців, а потім і других вінців. Остантіх вінців шестірні і колеса - у точці р, зуби 5 і 10 ньої із зачеплення вийде сполучена пара зубів четвертих вінців шестірні і колеса - у точці k. перших вінців шестірні і колеса. Після виходу із Кути повороту j 12, j13, j14 др угого, третього і зачеплення кожної із зазначених сполучених пар четвертого вінців шестірні щодо першого вінця зубів у зачеплення послідовно будуть вступати 7 35343 8 наступні пари зубів третього, другого і першого r 2 + r 2 + (r1 + r2 - r1a )2 - (r1 - r1a )2 вінців, що дозволить постійно перебувати в роботі j23 arccos b2 2 ; (5) одночасно чотирьом сполученим парам зубів. 2r2 r2 + (r1 + r2 - r1a )2 Розглянемо вивід залежностей кутів j 12 , j 13 , b2 j14 і j22, j23, j 24 . Із цією метою скористаємося трикутниками О1ас, О1ар, О1аk, О 2ас, О2ар, О 2аk 2 2 2 2rb 2 + (r1 + r2 - r1a ) + (aw sin aw - r1k ) (Фіг.4) і теоремою косинусів, ви ходячи з яких, заj24 arccos ; (6) пишемо: 2 ér 2 + (r1 + r2 - r1 )2 ù ér 2 + (aw sin aw - r1k )2 ù a ú ê b2 ê b2 ú ë ûë û (O a)2 + (O1c )2 - (ac) 2 ; j12 = arccos 1 2 (O1( ) O1a a ) Формули (1) - (6) використаються при проекту2 2 2 ванні зубчастих передач із точковою чотирипар(O a) + (O1p ) - (ap) ; j13 = arccos 1 ною системою зачеплення евольвентних зубів. 2(O1a ) O1 ( )p Розшифровка і визначення параметрів r 1, r 2, r1, r2, ra1, ra2 , r b1 і r b2 , що входять у вираження (1) - (6), (O1a)2 + (O1k )2 - (ak) 2 ; j14 = arccos надані вище. 2 (O1a ) O1k ( ) Для оцінки максимальних контактних напруг і 2 2 2 навантажувальної здатності розглянутої зубчастої (O a) + (O2c ) - (ac ) ; j22 = arccos 2 передачі скористаємося відомою формулою проф. 2 (O2 a )(O2 c ) А.П. Попова, що при коефіцієнтах Пуассона 2 2 2 n 1=n 2=n=0,3 і модулях пружності матеріалів (O a ) + (O2p) - (ap ) ; j 23 = arccos 2 Е1 Е2=Е має вигляд: = 2(O 2a )(O2p ) 0,33 3 (a + n )2E2Fn (O 2a)2 + (O 2k )2 - (ak )2 ; sk = , j24 = arccos a R2 2 (O2 a )(O2 k ) яка при величині нормальної сили k3Fn/4, що 2 + r 2 ; O c = r 2 + r 2 ; ac=ab/4; діє на кожний із чотирьох вінців, буде виглядати де: O1a = rb1 1a 1 b1 1c так: 2 - r 2 + r 2 - r2 - a sina ; ab = ra1 b1 w w 0,208k 3 (a + n)2 E2Fn a2 b2 sk = , a w=m(zx+z2)/2; a R2 2 2 r1a = Aa = AB - Ba = a w sina w - ra2 - rb2 ; rw де: a = - коефіцієнт, що залежить від R r 1c=p1c+ac=r 1c+ab/4; відношення радіусів r w i R у двох взаємно перпен2 2 O1p=r 1; ap=r 1-r 1a ; O1k = rb1 + r1k ; r 1k=r 1+ab/4; дикулярних площинах zOx і zOy (мал. 2 і 3); rr r w = 1 2 - наведений радіус кривизни бічних 2 + (a sina - r )2 ; ak=r 1k-r 1a ; O 2a = rb2 r1 + r 2 w w 1a профілів евольвентних зубів шестірні і колеса в O2p=r2; смузі зачеплення, тобто в точці р (площина zOx). 2 Як приклад розглянемо перший ступінь судноap=r 1-r 1a; O 2k = rb2 + (a w sina w - r1 )2 . k вого редуктора, у якої z1=36; z2=110; m=6мм; З урахуванням вищенаведених позначень виa w=20°; bw=215мм; n=0,3; Е=2,1×105МПа; раження кутів j12 ...j24, приймуть остаточний вид: 4 Fn=7,84×10 H; k=1,075; с=9мм; DS=0,005; 0,0075; 2 0,01мм. rb1 + r1ar1c j12 = arccos ; За відомими формулами знаходимо (1) ær 2 + r2 öær 2 + r2 ö r 1=36,936мм; r 2=112,86мм; r w=27,819мм; b=(bwç b1 1a ÷ç b1 1c ÷ è øè ø 3с)/4=(215-3×9)/4=47мм; R=55225; 36816,7; 21712,5мм при відповідних значеннях параметра DS=0,005; 0,0075; 0,01мм. Зазначеним значенням r 2 + r2 - r1(r1 - 2r1a ) радіуса R відповідають величини коефіцієнта j13 = arccos b1 1 ; (2) a=0,00224; 0,0275 і 0,0318. 2r1 r 2 + r2 b1 1a Розрахунки контактних максимальних напруг sk за формулою (7) і навантажувальної здатності 2 по цих навантаженнях, вираженої коефіцієнтом jн, rb1 + r1ar1 k наведені в таблиці. У цій же таблиці дані максимаj14 = arccos ; (3) льні контактні напруги для традиційного контакту æ r2 + r2 öær 2 + r2 ö ç b1 1a ÷ç b1 1k ÷ зубів по лінії, знайдені по відомій формулі Герца: è øè ø EFn sH = 0,418 . 2r 2 + (r1 + r2 - r1a )2 + (r1 + r2 - r1c )2 - (r1 - r1a )2 bwrw c j22 arccos b2 ; (4) З таблиці очевидно, що при зменшенні пара2 ér2 + (r1 + r2 - r1 )2 ù ér 2 + (r1 + r2 - r1c )2 ù a ú ê b2 ê b2 ú ë ûë û метра DS з 0,01мм до 0,005мм напруги sk знизилися в порівнянні з напругами sH в 1,243...1,421 разу, 9 35343 10 у зв'язку із чим навантажувальна здатність розгляза рахунок підвищення навантажувальної здатноснутої з убчастої передачі із точкової і чотирипарті зубчастої передачі, підвищення терміну служби і ною системою зачеплення зубів збільшилася в ефективності роботи. 1,92...2,871 рази. Суспільна корисність технічного рішення, якого Наведені розрахунки вказують на високу ефезаявлено, полягає в істотному поліпшенні ктивність пропонованої зубчастої передачі по навiброакустичних характеристик передач за рахунок вантажувальній здатності, обумовленої дією конзниження вібрації і шуму (промсанітарія) внаслідок тактних напруг. одночасного входу в зачеплення чотирьох сполуЕкономічний ефект від впровадження пропочених пар зубів. нованого технічного розв'язання варто очікувати Таблиця Обумовлені параметри R×10-3,мм a sk, МПа sH, МПа jk=sH /sk jH= j3 k Параметр DS 0,005 55,225 0,0224 488,3 0,01 27,612 0,0318 558,4 1,421 0,0075 36,816 0,0275 527,7 694 1,315 2,871 2,275 1,920 1,243 11 35343 12 13 Комп’ютерна в ерстка Г. Паяльніков 35343 Підписне 14 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюToothed gearing with point and four-pair system of teeth engagement
Автори англійськоюPopov Oleksii Pavlovych, Kiprieiev Yurii Mykhailovych
Назва патенту російськоюЗубчатая передача с точечной и четырехпарной системой зацепления зубьев
Автори російськоюПопов Алексей Павлович, Кипреев Юрий Николаевич
МПК / Мітки
МПК: F16H 1/00
Мітки: зубчаста, передача, чотирипарною, системою, зубів, зачеплення, точковою
Код посилання
<a href="https://ua.patents.su/7-35343-zubchasta-peredacha-z-tochkovoyu-i-chotiriparnoyu-sistemoyu-zacheplennya-zubiv.html" target="_blank" rel="follow" title="База патентів України">Зубчаста передача з точковою і чотирипарною системою зачеплення зубів</a>
Зубчаста передача попова о.п. з точковою системою зачеплення евольвентних зубів
Номер патенту: 11441
Опубліковано: 15.12.2005
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: о.п, системою, зубів, зубчаста, евольвентних, передача, зачеплення, точковою, попова
Формула / Реферат:
Зубчаста передача, яка складається з ведучого і веденого зубчастих коліс з розташованими на них евольвентними зубами, які взаємодіють одне з одним по лінії контакту, яка відрізняється тим, що в результаті заміни прямолінійних твірних бічних поверхонь зубів ведучого зубчастого колеса криволінійними твірними з радіусом кривизни R виконана точкова система зачеплення зубів, при цьому радіус R при перекосі зубів на кут Ψ і при відсутності...
Евольвентна зубчаста передача попова о.п. з точковою системою зачеплення поздовжньо модифікованих зубів
Номер патенту: 11952
Опубліковано: 16.01.2006
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: поздовжньої, о.п, системою, евольвентна, зубів, зачеплення, точковою, попова, зубчаста, модифікованих, передача
Формула / Реферат:
Евольвентна зубчаста передача з точковою системою зачеплення поздовжньо модифікованих зубів, що містить ведуче та ведене зубчасті колеса з розташованими на них евольвентними зубами, які взаємодіють один з одним по лінії контакту, яка відрізняється тим, що прямолінійні твірні бічних поверхонь зубів ведучого зубчастого колеса замінені криволінійними твірними з радіусом кривизни
Зубчаста передача попова о.п. з точковою і двопарною системою зачеплення евольвентних зубів
Номер патенту: 81008
Опубліковано: 26.11.2007
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: системою, евольвентних, точковою, зубчаста, зачеплення, зубів, о.п, передача, попова, двопарною
Формула / Реферат:
Зубчаста передача, яка складається із ведучого і веденого зубчастих коліс з розташованими на них енкаїтними зубами з лінійною системою зачеплення, яка відрізняється тим, що зуби виконані евольвентними з точковою системою зачеплення внаслідок наявності криволінійних твірних бічних поверхонь зубів ведучого зубчастого колеса з радіусом кривизни , причому ведуче і ведене...
Зубчаста передача з модифікованими ніжками зубів
Номер патенту: 76881
Опубліковано: 15.09.2006
Автор: Попов Олексій Павлович
МПК: F16H 3/00, F16H 1/00, F16H 55/02
Мітки: передача, модифікованими, ніжками, зубчаста, зубів
Формула / Реферат:
Зубчаста передача, що містить ведуче та ведене зубчасті колеса з розташованими на них модифікованими евольвентними зубами, що складаються з головок та ніжок, які знаходяться між собою в зачепленні, яка відрізняється тим, що евольвенті криві бічних профілів ніжок зубів ведучого зубчастого колеса з одного (нереверсивна передача) або з обох (реверсивна передача) боків на відстані
Зубчаста передача з криволінійними твірними зубів
Номер патенту: 77304
Опубліковано: 15.11.2006
Автор: Попов Олексій Павлович
Мітки: передача, зубів, зубчаста, криволінійними, твірними
Формула / Реферат:
Зубчаста передача, що містить ведуче та ведене зубчасті колеса з розташованими на них поздовжньо коригованими евольвентними зубами, що знаходяться між собою в зачепленні, яка відрізняється тим, що твірні бічних поверхонь зубів ведучого зубчастого колеса виконані криволінійними, при цьому товщина зубів S(y) від їх середини до торців зменшується за нелінійним законом, тобто:
Попередній патент: Кормова добавка для свиней “лізовіт”
Наступний патент: Спосіб діагностики порушень вестибулярного апарата у хворих із легкою черепно-мозковою травмою
Випадковий патент: Спосіб хірургічного доступу при виконанні оперативних втручань хворим із травматичними та дегенеративно-дистрофічними ушкодженнями хребта