Спосіб визначення кутових координат джерела оптичного випромінювання та позиційно-чутлива матриця фоточутливих елементів
Номер патенту: 51047
Опубліковано: 15.11.2002
Автори: Потапова Галина Костянтинівна, Москаленко Михайло Андрійович
Формула / Реферат
1. Спосіб визначення кутових координат джерела оптичного випромінювання, який полягає у тому, що за допомогою оптичної системи випромінювання джерела фокусують на позиційно-чутливу матрицю у світлову пляму, перетворюють оптичні сигнали на елементах матриці в електричні сигнали, формують електричні сигнали, рівні сумам електричних сигналів з елементів матриці, порівнюють ці сигнали з порогом виявлення, за результатами порівняння приймають рішення про наявність та положення світлової плями на відповідних елементі чи групі елементів матриці, а за положенням світлової плями на матриці визначають кутові координати джерела, який відрізняється тим, що кількість рядків m та кількість стовпців n матриці обирають кратними чотирьом, додатково формують електричні сигнали, рівні сумам електричних сигналів від елементів матриці кожного непарного рядка, розташованих у непарних стовпцях, сумам електричних сигналів від елементів матриці кожного парного рядка, розташованих у парних стовпцях, сумам електричних сигналів від елементів матриці кожного непарного стовпця, розташованих у парних рядках і сумам електричних сигналів від елементів матриці кожного парного стовпця, розташованих у непарних рядках.
2. Спосіб визначення кутових координат джерела оптичного випромінювання за п. 1, який відрізняється тим, що додатково формують електричні сигнали, рівні різницям сум електричних сигналів від елементів матриці кожного (4k-3) непарного рядка, розташованих у непарних стовпцях, і сум електричних сигналів від елементів матриці кожного наступного (4k-1) непарного рядка, розташованих у непарних стовпцях, різницям сум електричних сигналів від елементів матриці кожного (4k-2) парного рядка, розташованих у парних стовпцях, і сум електричних сигналів від елементів матриці наступного 4k парного рядка, розташованих у парних стовпцях, різницям сум електричних сигналів від елементів матриці кожного непарного (4l-3) стовпця, розташованих у парних рядках і сум електричних сигналів від елементів матриці наступного непарного (4l-1) стовпця, розташованих у парних рядках, і різницям сум електричних сигналів від елементів матриці кожного парного (4l-2) стовпця, розташованих у непарних рядках, і сум електричних сигналів від елементів матриці наступного парного 4l стовпця, розташованих у непарних рядках, де k = 1, 2, ...., m/4, l = 1, 2, ... , n/4, а з порогами виявлення порівнюють величини зазначених різницевих електричних сигналів.
3. Позиційно-чутлива матриця фоточутливих елементів, елементи якої включені по сигналу паралельно чи зустрічно, яка відрізняється тим, що кількість рядків і стовпців матриці кратні чотирьом, паралельно по сигналу з’єднані елементи матриці кожного непарного рядка, розташовані в непарних стовпцях, елементи матриці кожного парного рядка, розташовані в парних стовпцях, елементи матриці кожного непарного стовпця, розташовані в парних рядках, і елементи матриці кожного парного стовпця, розташовані в непарних рядках.
4. Позиційно-чутлива матриця фоточутливих елементів за п. 3, яка відрізняється тим, що додатково з’єднано в пари і включені по сигналу зустрічно елементи матриці сусідніх непарних рядків, розташовані в непарних стовпцях, елементи матриці сусідніх парних рядків, розташовані в парних стовпцях, елементи матриці сусідніх непарних стовпців, розташовані в парних рядках, і елементи матриці сусідніх парних стовпців, розташовані в непарних рядках.
Текст
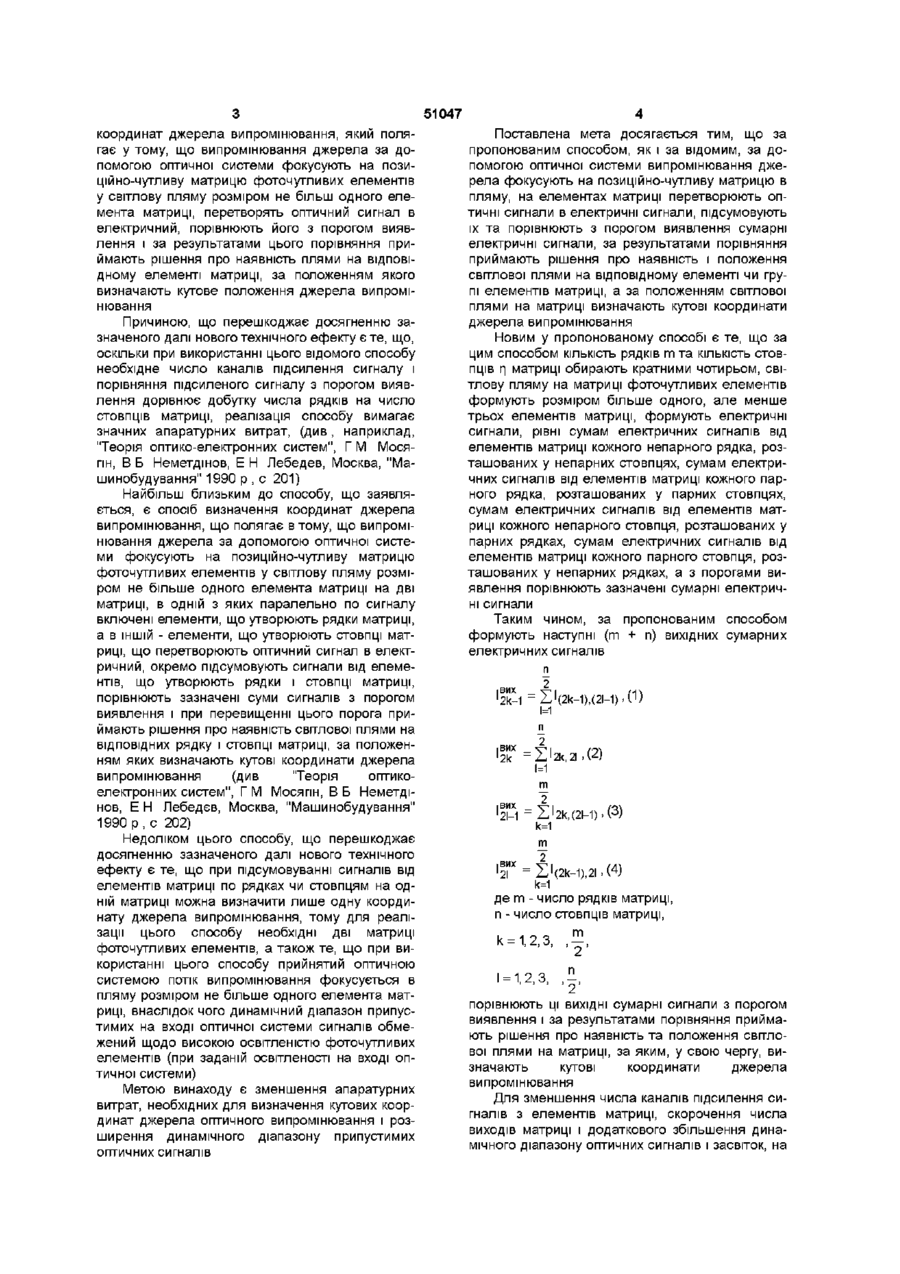
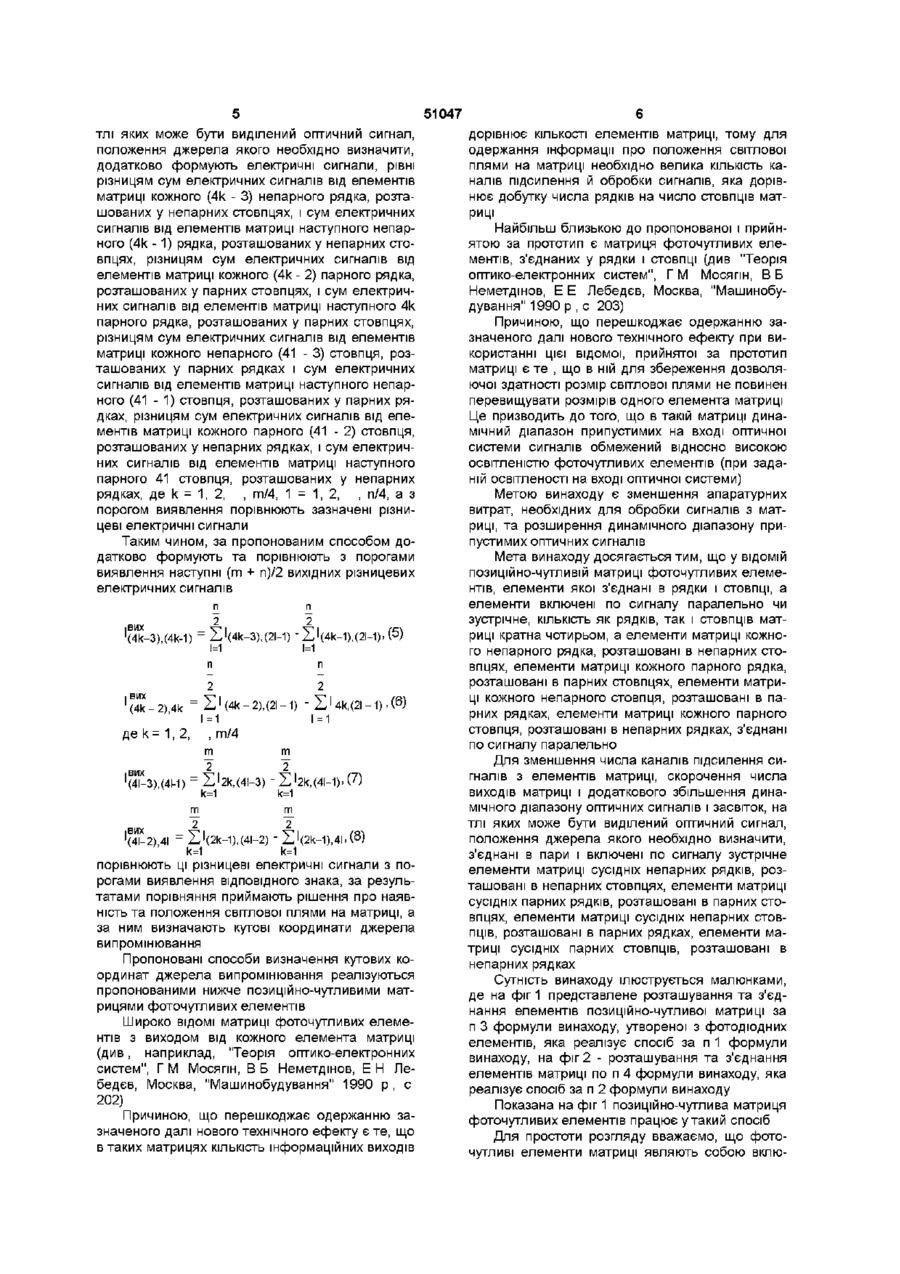
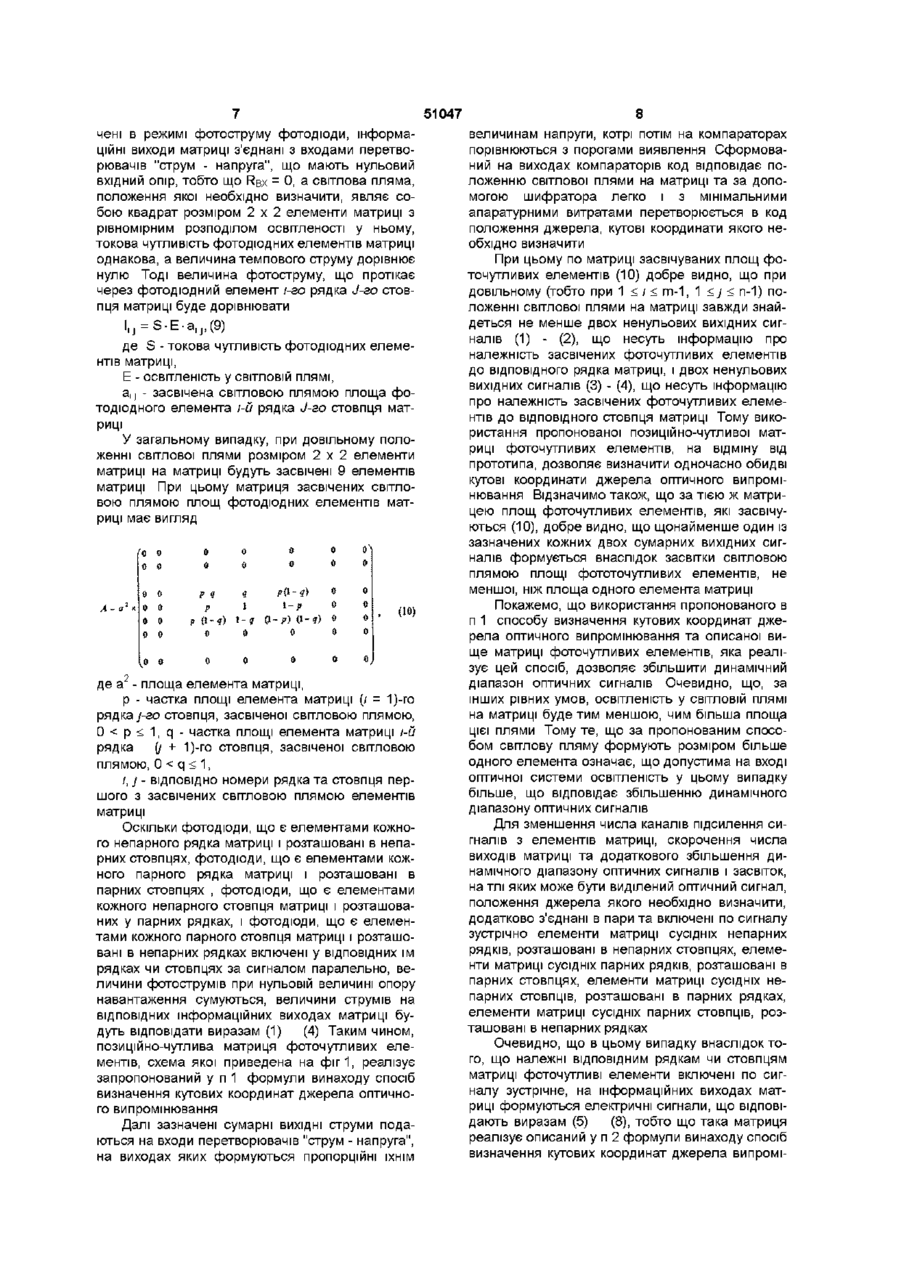
1 Спосіб визначення кутових координат джерела оптичного випромінювання, який полягає у тому, що за допомогою оптичної системи випромінювання джерела фокусують на позиційно-чутливу матрицю у світлову пляму, перетворюють оптичні сигнали на елементах матриці в електричні сигнали, формують електричні сигнали, рівні сумам електричних сигналів з елементів матриці, порівнюють ці сигнали з порогом виявлення, за результатами порівняння приймають рішення про наявність та положення світлової плями на ВІДПОВІДНИХ елементі чи групі елементів матриці, а за положенням світлової плями на матриці визначають кутові координати джерела, який відрізняється тим, що КІЛЬКІСТЬ рядків m та КІЛЬКІСТЬ СТОВПЦІВ П матриці обирають кратними чотирьом, додатково формують електричні сигнали, рівні сумам електричних сигналів від елементів матриці кожного непарного рядка, розташованих у непарних стовпцях, сумам електричних сигналів від елементів матриці кожного парного рядка, розташованих у парних стовпцях, сумам електричних сигналів від елементів матриці кожного непарного стовпця, розташованих у парних рядках і сумам електричних сигналів від елементів матриці кожного парного стовпця, розташованих у непарних рядках 2 Спосіб визначення кутових координат джерела оптичного випромінювання за п 1, який відрізняється тим, що додатково формують електричні сигнали, рівні різницям сум електричних сигналів від елементів матриці кожного (4к-3) непарного рядка, розташованих у непарних стовпцях, і сум електричних сигналів від елементів матриці кожно Винахід відноситься до галузі фотоприймальних пристроїв, а саме до засобів визначення кутових координат джерел оптичного випроміню го наступного (4к-1) непарного рядка, розташованих у непарних стовпцях, різницям сум електричних сигналів від елементів матриці кожного (4к-2) парного рядка, розташованих у парних стовпцях, і сум електричних сигналів від елементів матриці наступного 4к парного рядка, розташованих у парних стовпцях, різницям сум електричних сигналів від елементів матриці кожного непарного (4І-3) стовпця, розташованих у парних рядках і сум електричних сигналів від елементів матриці наступного непарного (41-1) стовпця, розташованих у парних рядках, і різницям сум електричних сигналів від елементів матриці кожного парного (4І-2) стовпця, розташованих у непарних рядках, і сум електричних сигналів від елементів матриці наступного парного 41 стовпця, розташованих у непарних рядках, де k = 1, 2, , m/4, 1 = 1,2, , п/4, а з порогами виявлення порівнюють величини зазначених різницевих електричних сигналів 3 Позиційно-чутлива матриця фоточутливих елементів, елементи якої включені по сигналу паралельно чи зустрічно, яка відрізняється тим, що КІЛЬКІСТЬ рядків і стовпців матриці кратні чотирьом, паралельно по сигналу з'єднані елементи матриці кожного непарного рядка, розташовані в непарних стовпцях, елементи матриці кожного парного рядка, розташовані в парних стовпцях, елементи матриці кожного непарного стовпця, розташовані в парних рядках, і елементи матриці кожного парного стовпця, розташовані в непарних рядках 4 Позиційно-чутлива матриця фоточутливих елементів за п 3, яка відрізняється тим, що додатково з'єднано в пари і включені по сигналу зустрічно елементи матриці сусідніх непарних рядків, розташовані в непарних стовпцях, елементи матриці сусідніх парних рядків, розташовані в парних стовпцях, елементи матриці сусідніх непарних стовпців, розташовані в парних рядках, і елементи матриці сусідніх парних стовпців, розташовані в непарних рядках вання та позиційно-чутливих матриць фоточутливих елементів зі спеціальними міжз'єднаннями Широко відомий спосіб визначення кутових О ю 51047 координат джерела випромінювання, який полягає у тому, що випромінювання джерела за допомогою оптичної системи фокусують на позиційно-чутливу матрицю фоточутливих елементів у світлову пляму розміром не більш одного елемента матриці, перетворять оптичний сигнал в електричний, порівнюють його з порогом виявлення і за результатами цього порівняння приймають рішення про наявність плями на відповідному елементі матриці, за положенням якого визначають кутове положення джерела випромінювання Причиною, що перешкоджає досягненню зазначеного далі нового технічного ефекту є те, що, оскільки при використанні цього відомого способу необхідне число каналів підсилення сигналу і порівняння підсиленого сигналу з порогом виявлення дорівнює добутку числа рядків на число стовпців матриці, реалізація способу вимагає значних апаратурних витрат, (див, наприклад, "Теорія оптико-електронних систем", Г М Мосяпн, В Б Неметдшов, Е Н Лебедев, Москва, "Машинобудування" 1990 р , с 201) Найбільш близьким до способу, що заявляється, є спосіб визначення координат джерела випромінювання, що полягає втому, що випромінювання джерела за допомогою оптичної системи фокусують на позиційно-чутливу матрицю фоточутливих елементів у світлову пляму розміром не більше одного елемента матриці на дві матриці, в одній з яких паралельно по сигналу включені елементи, що утворюють рядки матриці, а в ІНШІЙ - елементи, що утворюють стовпці матриці, що перетворюють оптичний сигнал в електричний, окремо підсумовують сигнали від елементів, що утворюють рядки і стовпці матриці, порівнюють зазначені суми сигналів з порогом виявлення і при перевищенні цього порога приймають рішення про наявність світлової плями на ВІДПОВІДНИХ рядку і стовпці матриці, за положенням яких визначають кутові координати джерела випромінювання (див "Теорія оптикоелектронних систем", Г М Мосяпн, В Б Неметдінов, Е Н Лебедев, Москва, "Машинобудування" 1990 р, с 202) Недоліком цього способу, що перешкоджає досягненню зазначеного далі нового технічного ефекту є те, що при підсумовуванні сигналів від елементів матриці по рядках чи стовпцям на одній матриці можна визначити лише одну координату джерела випромінювання, тому для реалізації цього способу необхідні дві матриці фоточутливих елементів, а також те, що при використанні цього способу прийнятий оптичною системою потік випромінювання фокусується в пляму розміром не більше одного елемента матриці, внаслідок чого динамічний діапазон припустимих на вході оптичної системи сигналів обмежений щодо високою освітленістю фоточутливих елементів (при заданій освітленості на вході оптичної системи) Метою винаходу є зменшення апаратурних витрат, необхідних для визначення кутових координат джерела оптичного випромінювання і розширення динамічного діапазону припустимих оптичних сигналів Поставлена мета досягається тим, що за пропонованим способом, як і за відомим, за допомогою оптичної системи випромінювання джерела фокусують на позиційно-чутливу матрицю в пляму, на елементах матриці перетворюють оптичні сигнали в електричні сигнали, підсумовують їх та порівнюють з порогом виявлення сумарні електричні сигнали, за результатами порівняння приймають рішення про наявність і положення світлової плями на відповідному елементі чи групі елементів матриці, а за положенням світлової плями на матриці визначають кутові координати джерела випромінювання Новим у пропонованому способі є те, що за цим способом КІЛЬКІСТЬ рядків m та КІЛЬКІСТЬ СТОВ ПЦІВ п матриці обирають кратними чотирьом, світлову пляму на матриці фоточутливих елементів формують розміром більше одного, але менше трьох елементів матриці, формують електричні сигнали, рівні сумам електричних сигналів від елементів матриці кожного непарного рядка, розташованих у непарних стовпцях, сумам електричних сигналів від елементів матриці кожного парного рядка, розташованих у парних стовпцях, сумам електричних сигналів від елементів матриці кожного непарного стовпця, розташованих у парних рядках, сумам електричних сигналів від елементів матриці кожного парного стовпця, розташованих у непарних рядках, а з порогами виявлення порівнюють зазначені сумарні електричні сигнали Таким чином, за пропонованим способом формують наступні ( т + п) вихідних сумарних електричних сигналів і ВИХ '2k-1 і ВИХ і ВИХ '21-1 І(2к-1),(2,-1),(1) 11 = п 2 1 2 = 2 ' 2к, 2 , ( ) і=і m ~2 = 2 "hk,(2\--\) ЛЗ) к=1 m Івих ! V I ІЛЛ " 2J(2k-1),2l Л 4 ) к=1 де m - число рядків матриці п - число стовпців матриці, к = 1,2,3, m 2І п '2' порівнюють ці ВИХІДНІ сумарні сигнали з порогом виявлення і за результатами порівняння приймають рішення про наявність та положення світлової плями на матриці, за яким, у свою чергу, визначають кутові координати джерела випромінювання Для зменшення числа каналів підсилення сигналів з елементів матриці, скорочення числа виходів матриці і додаткового збільшення динамічного діапазону оптичних сигналів і засвіток, на 1 =2,3, 1, 51047 тлі яких може бути виділений оптичний сигнал, положення джерела якого необхідно визначити, додатково формують електричні сигнали, рівні різницям сум електричних сигналів від елементів матриці кожного (4к - 3) непарного рядка, розташованих у непарних стовпцях, і сум електричних сигналів від елементів матриці наступного непарного (4к -1) рядка, розташованих у непарних стовпцях, різницям сум електричних сигналів від елементів матриці кожного (4к - 2) парного рядка, розташованих у парних стовпцях, і сум електричних сигналів від елементів матриці наступного 4к парного рядка, розташованих у парних стовпцях, різницям сум електричних сигналів від елементів матриці кожного непарного (41 - 3) стовпця, розташованих у парних рядках і сум електричних сигналів від елементів матриці наступного непарного (41 - 1) стовпця, розташованих у парних рядках, різницям сум електричних сигналів від елементів матриці кожного парного (41 - 2) стовпця, розташованих у непарних рядках, і сум електричних сигналів від елементів матриці наступного парного 41 стовпця, розташованих у непарних рядках, де k = 1, 2, , m/4, 1 = 1,2, , п/4, а з порогом виявлення порівнюють зазначені різницеві електричні сигнали Таким чином, за пропонованим способом додатково формують та порівнюють з порогами виявлення наступні ( т + п)/2 вихідних різницевих електричних сигналів п 2 11 = і ВИХ '(4k-3),(4k-1) І ВИХ _ 1 п 2 1=1 V І 4к,(2І (4к - 2) 4к " -^ ' (°) к=1 к=1 порівнюють ці різницеві електричні сигнали з порогами виявлення ВІДПОВІДНОГО знака, за результатами порівняння приймають рішення про наявність та положення світлової плями на матриці, а за ним визначають кутові координати джерела випромінювання Пропоновані способи визначення кутових координат джерела випромінювання реалізуються пропонованими нижче позиційно-чутливими матрицями фоточутливих елементів Широко ВІДОМІ матриці фоточутливих елементів з виходом від кожного елемента матриці (див, наприклад, "Теорія оптико-електронних систем", Г М Мосяпн, В Б Неметдшов, Е Н Лебедев, Москва, "Машинобудування" 1990 р, с 202) Причиною, що перешкоджає одержанню зазначеного далі нового технічного ефекту є те, що в таких матрицях КІЛЬКІСТЬ інформаційних виходів дорівнює КІЛЬКОСТІ елементів матриці, тому для одержання інформації про положення світлової плями на матриці необхідно велика КІЛЬКІСТЬ каналів підсилення й обробки сигналів, яка дорівнює добутку числа рядків на число стовпців матриці Найбільш близькою до пропонованої і прийнятою за прототип є матриця фоточутливих елементів, з'єднаних у рядки і стовпці (див "Теорія оптико-електронних систем", Г М Мосяпн, В Б Неметдшов, Е Е Лебедев, Москва, "Машинобудування" 1990 р , с 203) Причиною, що перешкоджає одержанню зазначеного далі нового технічного ефекту при використанні цієї відомої, прийнятої за прототип матриці є те , що в ній для збереження дозволяючої здатності розмір світлової плями не повинен перевищувати розмірів одного елемента матриці Це призводить до того, що в такій матриці динамічний діапазон припустимих на вході оптичної системи сигналів обмежений відносно високою освітленістю фоточутливих елементів (при заданій освітленості на вході оптичної системи) Метою винаходу є зменшення апаратурних витрат, необхідних для обробки сигналів з матриці, та розширення динамічного діапазону припустимих оптичних сигналів Мета винаходу досягається тим, що у ВІДОМІЙ позиційно-чутливій матриці фоточутливих елементів, елементи якої з'єднані в рядки і стовпці, а елементи включені по сигналу паралельно чи зустрічне, КІЛЬКІСТЬ як рядків, так і стовпців матриці кратна чотирьом, а елементи матриці кожного непарного рядка, розташовані в непарних стовпцях, елементи матриці кожного парного рядка, розташовані в парних стовпцях, елементи матриці кожного непарного стовпця, розташовані в парних рядках, елементи матриці кожного парного стовпця, розташовані в непарних рядках, з'єднані по сигналу паралельно Для зменшення числа каналів підсилення сигналів з елементів матриці, скорочення числа виходів матриці і додаткового збільшення динамічного діапазону оптичних сигналів і засвіток, на тлі яких може бути виділений оптичний сигнал, положення джерела якого необхідно визначити, з'єднані в пари і включені по сигналу зустрічне елементи матриці сусідніх непарних рядків, розташовані в непарних стовпцях, елементи матриці сусідніх парних рядків, розташовані в парних стовпцях, елементи матриці сусідніх непарних стовпців, розташовані в парних рядках, елементи матриці сусідніх парних стовпців, розташовані в непарних рядках Сутність винаходу ілюструється малюнками, де на фіг 1 представлене розташування та з'єднання елементів позиційно-чутливої матриці за п 3 формули винаходу, утвореної з фотодюдних елементів, яка реалізує спосіб за п 1 формули винаходу, на фіг 2 - розташування та з'єднання елементів матриці по п 4 формули винаходу, яка реалізує спосіб за п 2 формули винаходу Показана на фіг 1 позиційно-чутливаматриця фоточутливих елементів працює у такий спосіб Для простоти розгляду вважаємо, що фоточутливі елементи матриці являють собою вклю 51047 чені в режимі фотоструму фотодюди, інформаційні виходи матриці з'єднані з входами перетворювачів "струм - напруга", що мають нульовий вхідний опір, тобто що RBX - 0, а світлова пляма, положення якої необхідно визначити, являє собою квадрат розміром 2 x 2 елементи матриці з рівномірним розподілом освітленості у ньому, токова чутливість фотодіодних елементів матриці однакова, а величина темпового струму дорівнює нулю Тоді величина фотоструму, що протікає через фотодюдний елемент і-го рядка J-го стовпця матриці буде дорівнювати Іч=3-Е-ач,(9) де S - токова чутливість фотодіодних елементів матриці, Е - освітленість у СВІТЛОВІЙ плямі, а,, - засвічена світловою плямою площа фотодюдного елемента і-й рядка J-го стовпця матриці У загальному випадку, при довільному положенні світлової плями розміром 2 x 2 елементи матриці на матриці будуть засвічені 9 елементів матриці При цьому матриця засвічених світловою плямою площ фотодіодних елементів матриці має вигляд оо 0 0 оо 1-ї о де а2 - площа елемента матриці, р - частка площі елемента матриці (/ = 1)-го рядка j-го стовпця, засвіченої світловою плямою, 0 < р < 1, q - частка площі елемента матриці і-й рядка (j + 1)-го стовпця, засвіченої світловою плямою, 0 < q < 1, /, j - ВІДПОВІДНО номери рядка та стовпця першого з засвічених світловою плямою елементів матриці Оскільки фотодюди, що є елементами кожного непарного рядка матриці і розташовані в непарних стовпцях, фотодюди, що є елементами кожного парного рядка матриці і розташовані в парних стовпцях , фотодюди, що є елементами кожного непарного стовпця матриці і розташованих у парних рядках, і фотодюди, що є елементами кожного парного стовпця матриці і розташовані в непарних рядках включені у ВІДПОВІДНИХ їм рядках чи стовпцях за сигналом паралельно, величини фотострумів при нульовій величині опору навантаження сумуються, величини струмів на ВІДПОВІДНИХ інформаційних виходах матриці будуть відповідати виразам (1) (4) Таким чином, позиційно-чутлива матриця фоточутливих елементів, схема якої приведена на фіг1, реалізує запропонований у п 1 формули винаходу спосіб визначення кутових координат джерела оптичного випромінювання Далі зазначені сумарні ВИХІДНІ струми подаються на входи перетворювачів "струм - напруга", на виходах яких формуються пропорційні їхнім 8 величинам напруги, котрі потім на компараторах порівнюються з порогами виявлення Сформований на виходах компараторів код відповідає положенню світлової плями на матриці та за допомогою шифратора легко і з мінімальними апаратурними витратами перетворюється в код положення джерела, кутові координати якого необхідно визначити При цьому по матриці засвічуваних площ фоточутливих елементів (10) добре видно, що при довільному (тобто при 1 < / < т - 1 , 1
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and photosensor array for determining angular coordinates of an optical radiation source
Автори англійськоюMoskalenko Mykhailo Andriiovych, Potapova Galyna Kostiantynivna, Potapova Halyna Kostiantynivna
Назва патенту російськоюСпособ определения угловых координат и матрица фоточувствительных элементов для определения положения источника оптического излучения
Автори російськоюМоскаленко Михаил Андреевич, Потапова Галина Константиновна
МПК / Мітки
МПК: H01L 31/05, H01L 31/042
Мітки: джерела, позиційно-чутлива, спосіб, елементів, випромінювання, оптичного, матриця, координат, кутових, фоточутлівих, визначення
Код посилання
<a href="https://ua.patents.su/7-51047-sposib-viznachennya-kutovikh-koordinat-dzherela-optichnogo-viprominyuvannya-ta-pozicijjno-chutliva-matricya-fotochutlivikh-elementiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення кутових координат джерела оптичного випромінювання та позиційно-чутлива матриця фоточутливих елементів</a>
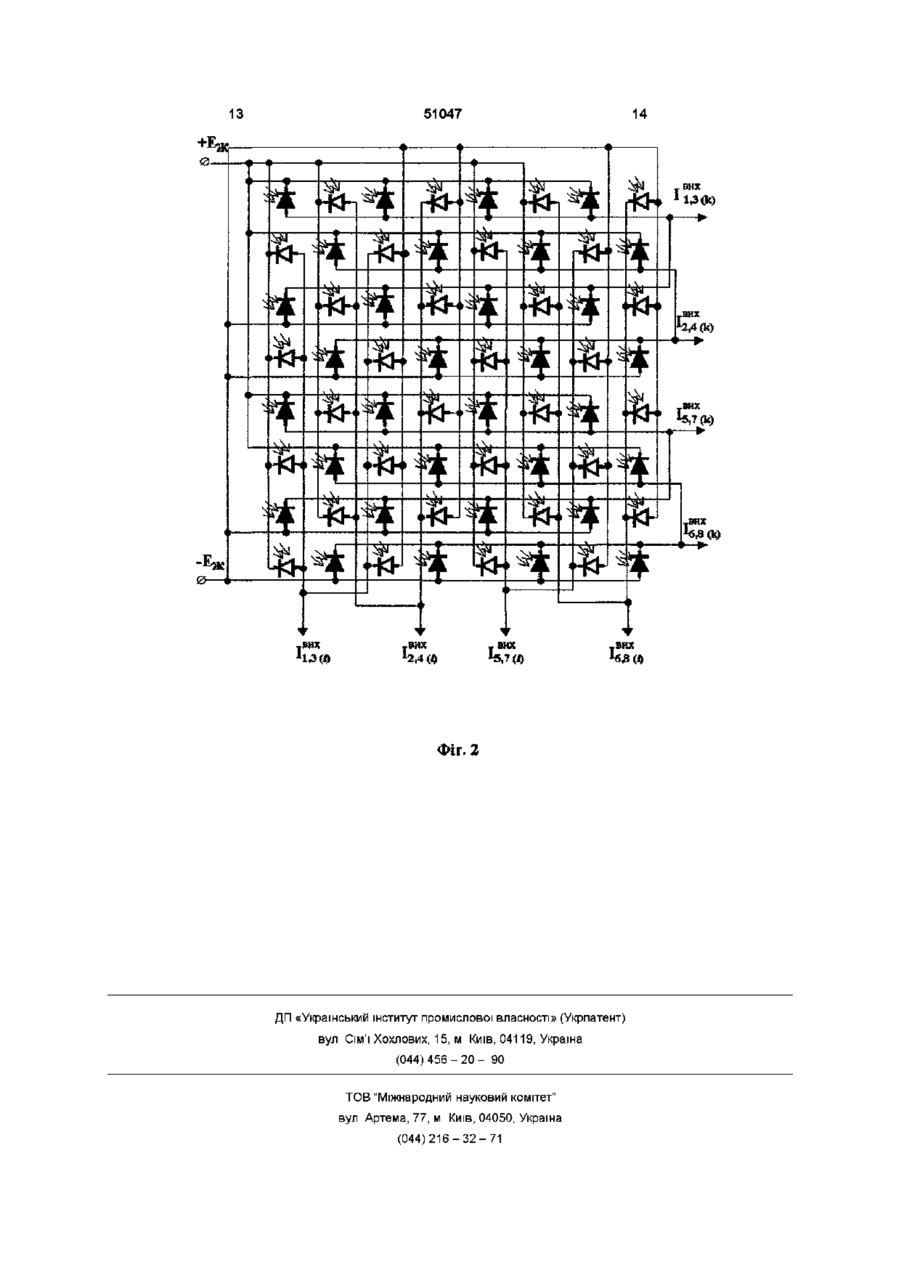
Пеленгатор для визначення кутових координат джерела імпульсного несинусоїдального сигналу
Номер патенту: 15412
Опубліковано: 30.06.1997
Автори: Хом'яков Олег Миколайович, Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: кутових, імпульсного, сигналу, джерела, несинусоїдального, визначення, пеленгатор, координат
Формула / Реферат:
Пеленгатор для определения угловых координат источника импульсного несинусоидального сигнала, содержащий приемную антенну с механизмом вращения антенны по азимуту, последовательно соединенную с приемником, отличающийся тем, что приемная антенна выполнена в виде металлического уголкового рефлектора, в нижней плоскости которого установлен экран из поглощающего материала, и вертикально расположенного проволочного вибратора, выход которого...
Спосіб визначення координат наземного джерела радіовипромінювання
Номер патенту: 43565
Опубліковано: 17.12.2001
Автори: Голкін Дмитро Васильович, Худов Генадій Володимирович, Бутенко Ольга Станіславівна, Деденок Віктор Петрович, Березіна Світлана Іванівна
МПК: G01S 5/06
Мітки: радіовипромінювання, визначення, наземного, джерела, координат, спосіб
Формула / Реферат:
Спосіб, визначення координат наземного джерела радіовипромінювання, який полягає в тому, що приймачі випромінювання встановлюють в двох пунктах прийому з відомими координатами, вимірюють різницю дальностей від джерела випромінювання до приймачів і запам'ятовують час виміру, виміряне значення різниці дальностей використовують для індикації першого різницево-дальномірного пеленга, який відрізняється тим, що радіоприймачі випромінювання...
Спосіб компенсації впливу випромінювання стороннього джерела на результати виміру яскравості оптичного поля об’єкта у твердій і рідкій фазах
Номер патенту: 38844
Опубліковано: 15.05.2001
Автори: Порєв Геннадій Володимирович, Порєв Володимир Андрійович
Мітки: стороннього, результаті, компенсації, оптичного, джерела, виміру, твердий, випромінювання, фазах, поля, об'єкта, яскравості, рідкий, впливу, спосіб
Формула / Реферат:
(21) 2000116167 Дата прийняття(54)(57) рішення 19 лютого 2001 р.Спосіб компенсації впливу випромінювання стороннього джерела на результати виміру яскравості оптичного поля об'єкта у твердій і рідкій...
Спосіб визначення координат джерела радіовипромінювання в однобазовому вимірювальному комплексі
Номер патенту: 46388
Опубліковано: 15.05.2002
Автори: Бутенко Ольга Станіславівна, Деденок Віктор Петрович, Худов Генадій Володимирович, Березіна Світлана Іванівна, Голкін Дмитро Васильович
МПК: G01S 5/06
Мітки: вимірювальному, координат, однобазовому, спосіб, джерела, радіовипромінювання, комплекси, визначення
Формула / Реферат:
Спосіб визначення координат джерела радіовипромінювання в однобазовому вимірювальному комплексі, що полягає в тому, що приймачі радіовипромінювання розміщають у двох пунктах прийому з відомими координатами, вимірюють різницю дальностей від того самого джерела радіовипромінювання до приймачів і запам'ятовують час виміру, який відрізняється тим, що шляхом розміщення одного з приймачів випромінювання на літальному апараті національної...
Пристрій для визначення координат джерела акустичної емісії
Номер патенту: 41138
Опубліковано: 15.08.2001
Автори: Прохоренко Сергій Вікторович, Горошко Андрій Володимирович, Ройзман Вілен Петрович, Ковтун Ігор Іванович
МПК: G01N 29/04
Мітки: емісії, акустичної, визначення, джерела, координат, пристрій
Формула / Реферат:
Пристрій для визначення координат джерела акустичної емісії триангуляційним акусто-емісійним (АЕ) методом, що містить чотири приймально - підсилювальних канали, кожен із яких складається з послідовно з'єднаних п'єзопсрстворювача (АЕ - датчика), попереднього підсилювача та підсилювача фільтрів, виходи якого з'єднано з входами формувача осциляцій і подій, формувача пікових значень амплітуди і блоком лінійних координат, які, в свою чергу,...
Попередній патент: Заглибний діафрагмовий вібраційний насос
Наступний патент: Спосіб зберігання свіжозібраних бульб до літнього садіння
Випадковий патент: Апарат конвективний опалювальний газовий