Електродинамічний вібратор

Формула / Реферат
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, підсилювач струму, вихід якого під’єднаний до обмотки рухомої циліндричної котушки, перший і другий суматори, коло зворотного зв’язку, що складається з послідовно з’єднаних датчика положення рухомої котушки і блока зворотного зв’язку, вихід якого під’єднаний до віднімального входу другого суматора, перший блок формування моделі-еталона вібратора, перший і другий випрямлячі, перший і другий згладжувальні фільтри, третій і четвертий суматори, перший підсилювач з регульованим коефіцієнтом підсилення, вихід задавального генератора під’єднаний через перший підсилювач з регульованим коефіцієнтом підсилення до входу першого блока формування моделі-еталона вібратора, а через послідовно з’єднані перший випрямляч і перший згладжувальний фільтр - до підсумовувального входу третього суматора, до віднімального входу якого під’єднаний через послідовно з’єднані другий випрямляч і другий згладжувальний фільтр вихід першого блока формування моделі-еталона вібратора, а вихід третього суматора сполучений з керувальним входом першого підсилювача з регульованим коефіцієнтом підсилення, під’єднаного своїм виходом до підсумовувального входу четвертого суматора, до віднімального входу якого під’єднаний вихід другого суматора, а вихід четвертого суматора і його віднімальний вхід сполучені з віднімальним і підсумовувальним входами першого суматора відповідно, вихід першого суматора під’єднаний до входу другого суматора, а також другий блок формування моделі-еталона вібратора, третій випрямляч, третій згладжувальний фільтр, п’ятий суматор, другий підсилювач з регульованим коефіцієнтом підсилення, причому вихід задавального генератора сполучений з підсумовувальним входом першого суматора через другий підсилювач з регульованим коефіцієнтом підсилення, керувальний вхід якого під’єднаний до виходу п’ятого суматора, підсумовувальний вхід якого сполучений з виходом першого згладжувального фільтра, а віднімальний вхід - з виходом третього згладжувального фільтра, вхід якого через послідовно з’єднані другий блок формування моделі-еталона вібратора і третій випрямляч сполучений з виходом другого суматора, а вихід четвертого суматора сполучений з входом підсилювача струму, який відрізняється тим, що вібратор додатково містить датчик зусилля, перший і другий узгоджувальні підсилювачі, четвертий і п’ятий випрямлячі, четвертий і п’ятий згладжувальні фільтри, пороговий елемент, шостий і сьомий суматори, перший, другий, третій, четвертий, п’ятий, шостий ключі, елемент «НІ», перший і другий тригери, генератори імпульсів, причому вихід датчика положення рухомої платформи з котушкою через послідовно з’єднані перший узгоджувальний підсилювач, четвертий випрямляч і четвертий згладжувальний фільтр сполучений з об’єднаними інформаційними входами першого і другого ключів, вихід першого з яких сполучений з віднімальним входом сьомого суматора, підсумовувальний вхід якого сполучений з виходом третього згладжувального фільтра, а вихід другого ключа сполучений з віднімальним входом шостого суматора, підсумовувальний вхід якого сполучений з виходом другого згладжувального фільтра, вихід шостого суматора через п’ятий ключ сполучений з керувальним входом першого блока формування моделі-еталона вібратора, вихід сьомого суматора через шостий ключ сполучений з керувальним входом другого блока формування моделі-еталона вібратора, датчик зусилля жорстко установлений на рухомій платформі вібратора, на датчику зусилля жорстко установлений випробуваний об’єкт, вихід датчика зусилля через послідовно з’єднані другий узгоджувальний підсилювач, п’ятий випрямляч, п’ятий узгоджувальний фільтр і пороговий елемент сполучений з об’єднаними керувальним входом третього ключа і входом елемента «НІ», вихід якого сполучений з керувальним входом четвертого ключа, вихід третього ключа сполучений з об’єднаними S-входом третього тригера і R-входом першого тригера, вихід четвертого ключа сполучений з R-входом другого тригера і S-входом першого тригера, керувальні входи першого і шостого ключів об’єднані і сполучені з прямим виходом другого тригера, керувальні входи другого і п’ятого ключів об’єднані і сполучені з прямим виходом першого тригера, інформаційні входи третього і четвертого ключів об’єднані і сполучені з виходом генератора імпульсів, R-входи першого і другого тригерів об’єднані і сполучені з зовнішнім входом «Попередня установка», окрім того перший і другий блоки формування моделей-еталонів вібратора виконані регульованими.
Текст
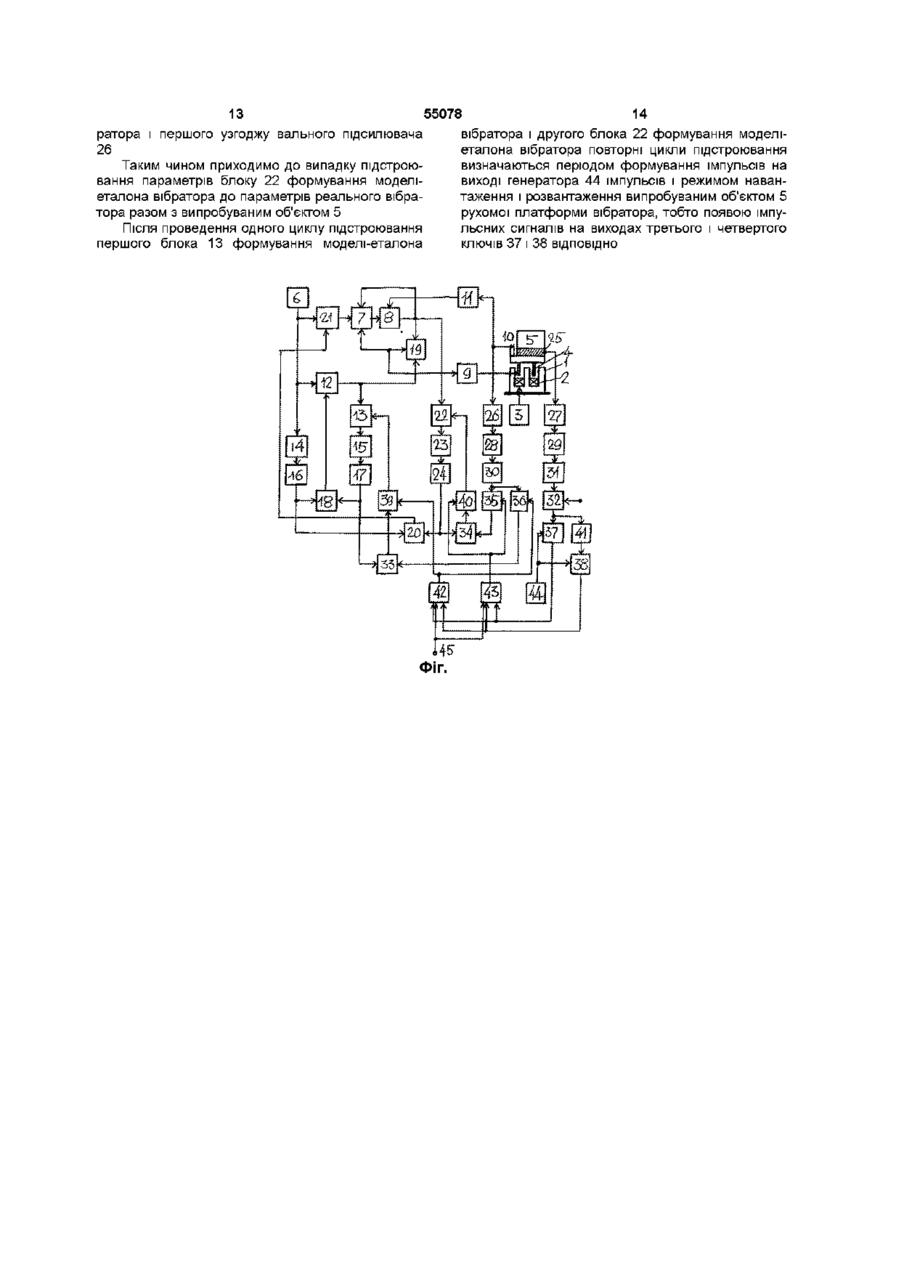
Елеісгродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, підсилювач струму, вихід якого під'єднаний до обмотки рухомої циліндричної котушки, перший і другий суматори, коло зворотного зв'язку, що складається з послідовно з'єднаних датчика положення рухомої котушки і блока зворотного зв'язку, вихід якого під'єднаний до віднімального входу другого суматора, перший блок формування моделі-еталона вібратора, перший і другий випрямлячі, перший і другий згладжувальні фільтри, третій і четвертий суматори, перший підсилювач з регульованим коефіцієнтом підсилення, вихід задавального генератора під'єднаний через перший підсилювач з регульованим коефіцієнтом підсилення до входу першого блока формування моделі-еталона вібратора, а через послідовно з'єднані перший випрямляч і перший згладжувальний фільтр - до підсумовувального входу третього суматора, до віднімального входу якого під'єднаний через послідовно з'єднані другий випрямляч і другий згладжувальний фільтр вихід першого блока формування моделі-еталона вібратора, а вихід третього суматора сполучений з керувальним входом першого підсилювача з регульованим коефіцієнтом підсилення, під'єднаного своїм виходом до підсумовувального входу четвертого суматора, до віднімального входу якого під'єднаний вихід другого суматора, а вихід четвертого суматора і його віднімальний вхід сполучені з віднімальним і підсумовувальним входами першого суматора ВІДПОВІДНО, ВИХІД першого суматора під'єднаний до входу другого суматора, а також другий блок формування моделі-еталона вібратора, третій випрямляч, третій згладжувальний фільтр, п'ятий суматор, другий підсилювач з регульованим коефіцієнтом підсилення, причому вихід задавал ьного генератора сполучений з підсумовувальним входом першого суматора че рез другий підсилювач з регульованим коефіцієнтом підсилення, керувальний вхід якого під'єднаний до виходу п'ятого суматора, підсумовувальний вхід якого сполучений з виходом першого згладжувал ьного фільтра, а віднімальний вхід - з виходом третього згладжувал ьного фільтра, вхід якого через послідовно з'єднані другий блок формування моделі-еталона вібратора і третій випрямляч сполучений з виходом другого суматора, а вихід четвертого суматора сполучений з входом підсилювача струму, який відрізняється тим, що вібратор додатково містить датчик зусилля, перший і другий узгоджувальні підсилювачі, четвертий і п'ятий випрямлячі, четвертий і п'ятий згладжувальні фільтри, пороговий елемент, шостий і сьомий суматори, перший, другий, третій, четвертий, п'ятий, шостий ключі, елемент «НІ», перший і другий тригери, генератори імпульсів, причому вихід датчика положення рухомої платформи з котушкою через послідовно з'єднані перший узгоджувальний підсилювач, четвертий випрямляч і четвертий згладжувальний фільтр сполучений з об'єднаними інформаційними входами першого і другого ключів, вихід першого з яких сполучений з віднімальним входом сьомого суматора, підсумовувальний вхід якого сполучений з виходом третього згладжувального фільтра, а вихід другого ключа сполучений з віднімальним входом шостого суматора, підсумовувальний вхід якого сполучений з виходом другого згладжувального фільтра, вихід шостого суматора через п'ятий ключ сполучений з керувальним входом першого блока формування моделі-еталона вібратора, вихід сьомого суматора через шостий ключ сполучений з керувальним входом другого блока формування моделі-еталона вібратора, датчик зусилля жорстко установлений на рухомій платформі вібратора, на датчику зусилля жорстко установлений випробуваний об'єкт, вихід датчика зусилля через послідовно з'єднані другий узгоджувальний підсилювач, п'ятий випрямляч, п'ятий узгоджувальний фільтр і пороговий елемент сполучений з об'єднаними керувальним входом третього ключа і входом елемента «НІ», вихід якого сполучений з керувальним входом четвертого ключа, вихід третього ключа сполучений з об'єднаними Sвходом третього тригера і R-входом першого тригера, вихід четвертого ключа сполучений з R 00 о ю ю З 55078 входом другого тригера і S-входом першого тригеключів об'єднані і сполучені з виходом генератора ра, керувальні входи першого і шостого ключів імпульсів, R-входи першого і другого тригерів об'єднані і сполучені з прямим виходом другого об'єднані і сполучені з ЗОВНІШНІМ ВХОДОМ «Попетригера, керувальні входи другого і п'ятого ключів редня установка», окрім того перший і другий блооб'єднані і сполучені з прямим виходом першого ки формування моделей-еталонів вібратора викотригера, інформаційні входи третього і четвертого нані регульованими Винахід відноситься до вібраційної техніки, а саме до електродинамічних збуджувачів коливань і може знайти застосування як джерело механічних коливань в стендах для віброзбудження і моделювання різних типів вібраційних навантажень Відомий електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, під'єднаний до обмотки рухомої циліндричної котушки через послідовно з'єднані перший і другий суматори і підсилювач струму, а також коло зворотного зв'язку, що містить послідовно з'єднані датчик положення рухомої котушки і блок зворотного зв'язку, вихід якого сполучений з другим входом другого суматора, блок формування моделіеталона вібратора, перший та другий випрямлячі, перший та другий згладжувальні фільтри, третій та четвертий суматори і підсилювач з регульованим коефіцієнтом підсилення, причому вихід задавального генератора сполучений через підсилювач з регульованим коефіцієнтом підсилення до входу блоку формування моделі-еталона вібратора, а через послідовно з'єднані перший випрямляч і перший згладжувальний фільтр - до підсумовувального входу третього суматора, до віднімального входу якого під'єднаний через послідовно з'єднані другий випрямляч і другий згладжувальний фільтр вихід блока формування моделі-еталона вібратора, а вихід третього суматора сполучений з керувальним входом підсилювача з регульованим коефіцієнтом підсилення, який під'єднаний своїм виходом до віднімального входу четвертого суматора, до підсумовувального входу якого під'єднаний вихід другого суматора, а вихід третього суматора і його підсумовувальний вхід під'єднані ВІДПОВІДНО до другого і третього входів першого суматора (Див ав св СРСР №902861, М кл ВО6 В 1/04, 1982р) Недоліком відомого пристрою є недостатня точність, обумовлена недостатньою компенсацією інерційної, дисипативної і гнучкої сили Найбільш близьким до заявляемого по технічній суті і результату, що отримується є електродинамічний вібратор , який містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопровода рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, підсилювач струму, вихід якого під'єднаний до обмотки рухомої циліндричної котушки, перший і другий суматори, коло зворотного зв'язку, що складається з послідовно з'єднаних датчика положення рухомої котушки і блока зворотного зв'язку, вихід якого під'єд наний до віднімального входу другого суматора, перший блок формування моделі-еталона вібратора, перший і другий випрямлячі, перший і другий згладжувальні фільтри, третій і четвертий суматори, перший підсилювач з регульованим коефіцієнтом підсилення , вихід задавального генератора під'єднаний через перший підсилювач з регульованим коефіцієнтом підсилення до входу першого блока формування моделі-еталона вібратора , а через послідовно з'єднані перший випрямляч і перший згладжувальний фільтр - до підсумовувального входу третього суматора, до віднімального входу якого під'єднаний через послідовно з'єднані другий випрямляч і другий згладжувальний фільтр вихід першого блока формування моделі-еталона вібратора , а вихід третього суматора сполучений з керувальним входом першого підсилювача з регульованим коефіцієнтом підсилення, під'єднаного своїм виходом до підсумовувального входу четвертого суматора, до віднімального входу якого під'єднаний вихід другого суматора, а вихід четвертого суматора і його віднімальний вхід сполучені з віднімальним і підсумовувальним входами першого суматора ВІДПОВІДНО, ВИХІД першого суматора під'єднаний до входу другого суматора Окрім того, електродинамічний вібратор додатково містить другий блок формування моделі-еталона вібратора, третій випрямляч, третій зглаждувальний фільтр, п'ятий суматор, другий підсилювач з регульованим коефіцієнтом підсилення, причому вихід задавального генератора сполучений з підсумовувальним входом першого суматора через другий підсилювач з регульованим коефіцієнтом підсилення, керувальний вхід якого під'єднаний до виходу п'ятого суматора, підсумовувальний вхід якого сполучений з виходом першого згладжувального фільтра, а віднімальний вхід - з виходом третього згладжувального фільтра, вхід якого через послідовно з'єднані другий блок формування моделі-еталона вібратора і третій випрямляч сполучений з виходом другого суматора, а вихід четвертого суматора сполучений з входом підсилювача струму (Див декл Патент України на винахід №40446, М кл ВО6 В1/04, 2001 р) Недоліком цього електродинамічного вібратора залишається також недостатня точність формування заданого силового впливу на випробуваний об'єкт при відтворенні вібрацій, що пояснюється нестабільністю параметрів і характеристик використаного вібростенда без установки випробуваного об'єкта і нестабільністю параметрів характеристики використаного вібростенда при установці на його платформі випробуваного об'єкта Таким чином, для підвищення точності форму 55078 вання заданого силового впливу на випробуваний об'єкт виникає необхідність регулювання параметрів блоків формування моделей-еталонів електродинамічного вібратора без урахування і при урахуванні впливу випробуваного об'єкта В основу винаходу поставлене завдання створити такий електродинамічний вібратор, в якому за рахунок нової структурної схеми систем керування, що включає нові блоки, елементи і структурні зв'язки, формується новий алгоритм більш точнішого формування заданого силового впливу на випробуваний об'єкт при відтворенні вібраційних навантажень, а саме, за рахунок введення датчика зусилля, а також двох каналів, кожен з котрих формується за допомогою узгоджувального підсилювача, випрямляча і згладжувального фільтра, причому вихідний сигнал одного з яких порівнюється в додатковому суматорі з усередненим сигналом з виходу першого блоку формування моделіеталона вібратора, а вихід цього суматора надходить на керувальний вхід першого блока формування моделі-еталона вібратора , а ще в додатковому суматорі вихідний сигнал першого каналу порівнюється з вихідним усередненим сигналом другого блоку формування моделі-еталона вібратора, а вихідний сигнал з цього суматора надходить на керувальний вхід другого блоку формування моделі-еталона вібратора, комутація сигналів на керувальних входах першого і другого блоків формування моделей-еталонів вібратора відбувається за рахунок присутності або відсутності сигналу на виході датчика зусилля, що усереднюється і надходить на пороговий елемент, вихідний сигнал якого комутує канали надходження сигналів на керувальні входи першого і другого блоків формування моделей-еталонів вібратора, тим самим відбувається адаптація обох моделейеталонів вібратора , ВИХІДНІ сигнали яких наближаються до вихідних сигналів з датчика положення при установці і відсутності на рухомій платформі вібратора випробуваного об'єкта, зменшується похибка і збільшується точність формування вихідним сигналом задавального генератора силового навантаження на випробуваний об'єкт Поставлене завдання реалізується тим, що електродинамічний вібратор, який містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопровода рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, підсилювач струму, вихід якого під'єднаний до обмотки рухомої циліндричної котушки, перший і другий суматори, коло зворотного зв'язку, що складається з послідовно з'єднаних датчика положення рухомої котушки і блока зворотного зв'язку, вихід якого під'єднаний до віднімального входу другого суматора, перший блок формування моделі-еталона вібратора, перший і другий випрямлячі, перший і другий згладжувальні фільтри, третій і четвертий суматори, перший підсилювач з регульованим коефіцієнтом підсилення, вихід задавального генератора під'єднаний через перший підсилювач з регульованим коефіцієнтом підсилення до входу першого блока формування моделі-еталона вібратора, а через послідовно з'єднані перший випрямляч і перший згладжувальний фільтр - до підсумо вувального входу третього суматора, до віднімального входу якого під'єднаний через послідовно з'єднані другий випрямляч і другий згладжувальний фільтр вихід першого блока формування моделі-еталона вібратора, а вихід третього суматора сполучений з керувальним входом першого підсилювача з регульованим коефіцієнтом підсилення, під'єднаного своїм виходом до підсумовувального входу четвертого суматора, до віднімального входу якого під'єднаний вихід другого суматора, а вихід четвертого суматора і його віднімальний вхід сполучені з віднімальним і підсумовувальним входами першого суматора ВІДПОВІДНО, ВИХІД першого суматора під'єднаний до входу другого суматора, а також другий блок формування моделі-еталона вібратора, третій випрямляч, третій згладжувальний фільтр, п'ятий суматор, другий підсилювач з регульованим коефіцієнтом підсилення, причому вихід задавального генератора сполучений з підсумовувальним входом першого суматора через другий підсилювач з регульованим коефіцієнтом підсилення, керувальний вхід якого під'єднаний до виходу п'ятого суматора, підсумовувальний вхід якого сполучений з виходом першого згладжувального фільтра, а віднімальний вхід - з виходом третього згладжувального фільтра, вхід якого через послідовно з'єднані другий блок формування моделі-еталона вібратора і третій випрямляч сполучений з виходом другого суматора, а вихід четвертого суматора сполучений з входом підсилювача струму, згідно винаходу, електродинамічний вібратор додатково містить датчик зусилля, перший і другий узгоджувальні підсилювачі, четвертий і п'ятий випрямлячі, четвертий і п'ятий згладжувальні фільтри, пороговий елемент, шостий і сьомий суматори, перший, другий, третій, четвертий, п'ятий, шостий ключі, елемент «НІ», перший і другий тригери, генератор імпульсів, при цьому вихід датчика положення рухомої платформи з котушкою через послідовно з'єднані перший узгоджувальний підсилювач, четвертий випрямляч і четвертий згладжувальний фільтр сполучений з об'єднаними інформаційними входами першого і другого ключів, вихід першого з яких сполучений з віднімальним входом сьомого суматора, підсумовувальний вхід якого сполучений з виходом третього згладжувального фільтра, а вихід другого ключа сполучений з віднімальним входом шостого суматора, підсумовувальний вхід якого сполучений з виходом другого згладжувального фільтра, вихід шостого суматора через п'ятий ключ сполучений з керувальним входом першого блока формування моделі-еталона вібратора, вихід сьомого суматора через шостий ключ сполучений з керувальним входом другого блока формування моделі-еталона вібратора, датчик зусилля жорстко установлений на рухомій платформі вібратора, на датчику зусилля жорстко установлений випробуваний об'єкт, вихід датчика зусилля через послідовно з'єднані другий узгоджувальний підсилювач, п'ятий випрямляч, п'ятий узгоджувальний фільтр і пороговий елемент сполучений з об'єднаними керувальним входом третього ключа і входом елемента «НІ», вихід якого сполучений з керувальним входом четвертого ключа, вихід третього ключа сполучений з об'єднаними S-входом другого три 55078 гера і R-входом першого тригера, вихід четвертого ключа сполучений з R-входом другого тригера і Sвходом першого тригера, керувальні входи першого і шостого ключів об'єднані і сполучені з прямим виходом другого тригера, керувальні входи другого і п'ятого ключів об'єднані і сполучені з прямим виходом першого тригера, інформаційні входи третього і четвертого ключів об'єднані і сполучені з виходом генератора імпульсів , R-входи першого і другого тригерів об'єднані і сполучені з ЗОВНІШНІМ входом «Попередня установка», окрім того, перший і другий блоки формування моделей-еталонів вібратора виконані регульованими Вся сукупність суттєвих ознак запропонованого електродинамічного вібратора, включаючи ВІДМІННІ, забезпечує підвищення точності формування заданого силового навантаження на випробуваний об'єкт за рахунок використання інформації, що міститься в сигналах на виходах шостого суматора, яка надходить на керувальний вхід першого блока формування моделі-еталона вібратора, і сьомого суматора, яка надходить на керувальний вхід другого блока формування моделі-еталона вібратора, а також інформації на виході датчика зусилля після перетворення її в постійний сигнал, яка призводить до комутації каналів для регулювання параметрів першого і другого блоків формування моделей-еталонів вібратора На кресленні (фіг) наведена структурна схема електродинамічного вібратора Електродинамічний вібратор містить магнітопровід 1 з обмоткою 2 підмагнічування, джерело З постійного струму, рухому циліндричну котушку 4 з платформою (на кресленні не позначена) за випробуваним об'єктом 5, закріпленим на платформі, задавальний генератор 6, перший суматор 7, другий суматор 8, підсилювач 9 струму, датчик 10 положення рухомої котушки 4, блок 11 зворотного зв'язку, перший підсилювач 12 з регульованим коефіцієнтом підсилення, перший блок 13 формування моделі-еталона вібратора, перший і другий випрямлячі 14 та 15 ВІДПОВІДНО, перший і другий згладжувальні фільтри 16 і 17 ВІДПОВІДНО, третій, четвертий і п'ятий суматори 18, 19 і 20 ВІДПОВІДНО, другий підсилювач 21 з регульованим коефіцієнтом підсилення, другий блок 22 формування моделі-еталона вібратора, третій випрямляч 23, третій згладжувальний фільтр 24, датчик 25 зусилля, що передається на випробуваний об'єкт 5, перший узгоджувальний підсилювач 26, другий узгоджувальний підсилювач 27, четвертий і п'ятий випрямлячі 28, 29 ВІДПОВІДНО, четвертий і п'ятий узгоджувальні фільтри ЗО, 31 ВІДПОВІДНО, пороговий елемент 32, шостий і сьомий суматори 33, 34 ВІДПОВІДНО, перший, другий, третій, четвертий, п'ятий, шостий ключі 35, 36, 37, 38, 39, 40 ВІДПОВІДНО, елемент 41 «НІ», перший і другий тригери 42, 43 ВІДПОВІДНО, генератор імпульсів 44, ЗОВНІШНІЙ ВХІД 45 «Попередня установка» Елементи пристрою з'єднані наступним чином Вихід задавального генератора 6 через другий підсилювач 21 з регульованим коефіцієнтом підсилення з'єднаний з підсумовувальним входом першого суматора 7, вихід якого сполучений з підсумовувальним входом другого суматора 8, вихід 8 якого з єднаний з віднімальним входом четвертого суматора 19, підсумовувальний вхід якого через перший підсилювач 12 з регульованим коефіцієнтом підсилення з'єднаний з виходом задавального генератора 6 Вихід четвертого суматора 19 з'єднаний з віднімальним входом першого суматора 7, об'єднаним з входом підсилювача 9 струму, вихід якого сполучений з обмоткою рухомої циліндричної котушки 4 вібратора Окрім того, вихід задавального генератора 6 через послідовно з'єднані перший випрямляч 14 і перший згладжувальний фільтр 16 сполучений з підсумовувальним входом третього суматора 18, віднімальний вхід якого через послідовно з'єднані перший блок 13 формування моделі-еталона вібратора, другий випрямляч 15 і другий згладжувальний фільтр 17 сполучений з виходом першого підсилювача 12 з регульованим коефіцієнтом підсилення Вихід третього суматора 18 сполучений з керувальним входом першого підсилювача 12 з регульованим коефіцієнтом підсилення Вихід другого суматора 8 з'єднаний з другим підсумовувальним входом першого суматора 7 і входом другого блоку 22 формування моделі-еталона вібратора, вихід якого через послідовно з'єднані третій випрямляч 23 і третій згладжувальний фільтр 24 під'єднаний до віднімального входу п'ятого суматора 20, підсумовувальний вхід якого під'єднаний до виходу першого згладжувального фільтра 16, а вихід п'ятого суматора 20 під'єднаний до керувального входу другого підсилювача 21 з регульованим коефіцієнтом підсилення Датчик 10 положення рухомої котушки має жорстке кріплення на платформі, а його вихід через блок 11 зворотного зв'язку сполучений з віднімальним входом другого суматора 8 Перший підсилювач 12 з регульованим коефіцієнтом підсилення визначає незалежність сигналу на вході першого блока 13 формування моделі-еталона вібратора від зміни величини напруги на виході задавального генератора 6 Перший блок 13 формування моделі-еталона вібратора є функціональним перетворювачем сигналу, що формує передатну функцію вібратора без урахування впливу випробуваного об'єкту 5 Блок 13 також корегує коефіцієнт підсилення першого підсилювача 12 з регульованим коефіцієнтом підсилення при появі різних дестабілізуючих факторів і підтримує постійний вихідний сигнал підсилювача 12 Другий блок 22 формування моделі-еталона вібратора є функціональним перетворювачем сигналу, що формує передатну функцію вібратора з урахуванням впливу випробуваного об'єкту і цей блок повинен мати регулювання його параметрів при ЗМІНІ випробуваного об'єкту 5 Коло зворотного зв'язку, що містить датчик 10 положення рухомої котушки 4 разом з платформою вібратора і блок 11 зворотного зв'язку, виконує функцію керування електромагнітною ПІДВІСНОЮ рухомої системи вібратора Рухома котушка 4 знаходиться під дією електромагнітної сили, що пропорційна струму на виході підсилювача 9 струму і величині магнітної індукції, що створюється джерелом 3 струму обмотки 2 підмагнічування 55078 Перший суматор 7 формує різницю сигналів, що надходить на підсумовувальний вхід, з виходів другого підсилювача 21 з регульованим коефіцієнтом підсилення, другого суматора 8 і сигналу з виходу четвертого суматора 19, що надходить на віднімальний вхід першого суматора 7 Другий суматор 8 формує на виході різницю сигналів, що надходить на його підсумовувальний вхід з виходу першого суматора 7 і сигналу з виходу блока 11 зворотного зв'язку, що надходить на віднімальний вхід другого суматора 8, тим самим стабілізується статичне положення рухомої системи вібратора Четвертий суматор 19 формує різницю двох сигналів, перший з яких надходить на його підсумовувальний вхід з виходу першого підсилювача 12 з регульованим коефіцієнтом підсилення, а другий надходить на його віднімальний вхід з виходу другого суматора 8, тим самим формуючи сигнал на виході, який пропорційний силі реакції, що задається сигналом на виході задавального генератора 6 при урахуванні сигналів на виходах першого і другого блоків 13, 22 формування моделей-еталонів вібратора Вихід датчика 10 положення рухомої платформи з котушкою 4 через послідовно з'єднані перший узгоджувальний підсилювач 26, четвертий випрямляч 28 і четвертий згладжувальний фільтр ЗО сполучений з об'єднаними інформаційними входами першого і другого ключів 35 і 36 ВІДПОВІДНО, ВИХІД першого з яких сполучений з віднімальним входом сьомого суматора 34, підсумовувальний вхід якого сполучений з виходом третього згладжувального фільтра 24, а вихід другого ключа 36 сполучений з віднімальним входом шостого суматора 33, підсумовувальний вхід якого сполучений з виходом другого узгоджу вального фільтра 17 Вихід ШОСТОГО суматора 33 через п'ятий ключ 39 сполучений з керувальним входом першого блока 13 формування моделі-еталона вібратора Вихід СЬОМОГО суматора 34 через шостий ключ 40 сполучений з керувальним входом другого блока 22 формування моделі-еталона вібратора Датчик 25 зусилля жорстко установлений на рухомій платформі вібратора, а на датчику 25 зусилля жорстко установлений випробуваний об'єкт 5 Вихід датчика 25 зусилля через послідовно з'єднані другий узгоджувальний підсилювач 27, п'ятий випрямляч 29, п'ятий згладжувальний фільтр 31 і пороговий елемент 32 сполучений з об'єднаними керувальним входом третього ключа 37 і входом елемента 41 «НІ», вихід якого сполучений з керувальним входом четвертого ключа 38 Вихід третього ключа 37 сполучений з об'єднаними S-входом другого тригера 43 і R-входом першого тригера 42 Вихід четвертого ключа 38 сполучений з об'єднаними R-входом другого тригера 43 і S-входом першого тригера 42 Об'єднані R-входи першого і другого тригерів 42, 43 сполучені з ЗОВНІШНІМ входом 45 «Попередня установка» Керувальні входи першого і шостого ключів 35 і 40 об'єднані і сполучені з прямим виходом другого тригера 43 Керувальні входи другого і п'ятого ключів 36 і 39 об'єднані і сполучені з прямим виходом першого тригера 42 Інформаційні входи тре 10 тього і четвертого ключів 37 і 38 об'єднані і сполучені з виходом генератора 44 імпульсів Третій суматор 18 формує на виході різницю сигналів, що надходить на його підсумовувальний і віднімальний входи з виходів першого і другого згладжувальних фільтрів 16 і 17 ВІДПОВІДНО П'ятий суматор 20 формує на виході різницю сигналів, що надходить на його підсумовувальний і віднімальний входи з виходів першого і третього згладжувальних фільтрів 16 і 24 ВІДПОВІДНО Шостий суматор 33 формує на виході різницю сигналів, що надходить на його підсумовувальний і віднімальний входи з виходів другого згладжувального фільтра 17 і другого ключа 36 ВІДПОВІДНО Сьомий суматор 34 формує на виході різницю сигналів, що надходять на його підсумовувальний і віднімальний входи з виходів третього згладжувального фільтра 24 і першого ключа 35 ВІДПОВІДНО В вихідному стані перший і другий тригери 42 і 43 установлені в нуль Перший, другий, п'ятий і шостий ключі 35, 36, 39, 40 ВІДПОВІДНО розімкнуті На виході генератора 44 імпульсів сигнали відсутні При надходженні сигналу «Пуск» генератор 44 імпульсів з заданим періодом формує ВИХІДНІ імпульси, що надходять на інформаційні входи третього і четвертого ключів 37 і 38 ВІДПОВІДНО Перший і другий блоки 13 і 22 формування моделей-еталона вібратора виконані регульованими, а саме, параметри блоків(коефіцієнти передачі) їх змінюються при надходженні сигналів на їх керувальні входи Електродинамічний вібратор працює таким чином На виході задавального генератора 6 формується сигнал пропорційній силі, яку треба передавати випробуваному об'єкту 5, установленому на платформі вібратора Цей сигнал надходить через другий підсилювач 21 з регульованим коефіцієнтом підсилення на перший вхід першого суматора 7, вихідний сигнал якого надходить на підсумовувальний вхід другого суматора 8, на віднімальний вхід якого надходить сигнал з виходу блока 11 зворотного зв'язку Вихідний сигнал другого суматора 8 надходить на віднімальний вхід четвертого суматора 19, на підсумовувальний вхід якого надходить сигнал з виходу задавального генератора 6 після проходження через перший підсилювач 12 з регульованим коефіцієнтом підсилення Вихідний сигнал четвертого суматора 19 надходить на об'єднані віднімальний вхід першого суматора 7 і вхід підсилювача 9 струму, вихідний сигнал якого надходить в обмотку рухомої котушки 4 вібратора Сигнал датчика 10 положення рухомої котушки 4 надходить на вхід блока 11 зворотного зв'язку Вихідний сигнал задавального генератора 6 після проходження через перший випрямляч 14 і перший згладжувальний фільтр 16 надходить на об'єднані підсумовувальні входи третього і п'ятого суматорів 18 і 20 ВІДПОВІДНО На віднімальний вхід третього суматора 18 надходить сигнал з виходу першого блока 13 формування моделі-еталона вібратора після проходження через другий випрямляч 15 і другий згладжувальний фільтр 17 Вихідний сигнал третього суматора 18 надхо 12 11 55078 дить на керувальний вхід першого підсилювача 12 рухомій платформі вібратора з регульованим коефіцієнтом підсилення, змінююНа віднімальний вхід шостого суматора 33 чи коефіцієнт підсилення таким чином, щоб сигнал надходить сигнал з виходу датчика 10 положення на виході цього підсилювача на змінювався, а цей рухомої платформи після проходження через посигнал і надходить на вхід першого блока 13 форслідовно з'єднані перший узгоджувальний підсимування моделі-еталона вібратора лювач 26, четвертий випрямляч 28, четвертий згладжувальний фільтр ЗО і замкнений другий На віднімальний вхід п'ятого суматора 20 надключ 36, а на підсумовувальний вхід шостого суходить сигнал з виходу другого блока 22 формуматора 33 надходить вихідний сигнал першого вання моделі-еталона вібратора після проходженблока 13 формування моделі-еталона вібратора ня через третій випрямляч 23 і третій після проходження через послідовно з'єднані друзгладжувальний фільтр 24 Вихідний сигнал п'ятогий випрямляч 15 і другий згладжу вальний фільтр го суматора 26 надходить на керувальний вхід 17 другого підсилювача 21 з регульованим коефіцієнтом підсилення, змінюючи коефіцієнт його підсиВідбувається підстроювання параметрів перлення таким чином, щоб вихідний сигнал другого шого блока 13 формування моделі-еталона вібрасуматора 8 не змінювався, а цей сигнал і надхотора в напрямку зменшення сигналу на виході шодить на вхід другого блока 22 формування моделістого суматора 33, що призводить до виконання еталона вібратора рівності сигналів в середньому на виходах першого блока 13 формування моделі-еталона вібратора Якщо сигнал на виході задавального генераі першого узгоджувального підсилювача 26 тора 6 позначимо Ur, сигнал на виході першого підсилювача 12 з регульованим підсилення познаТим самим приходимо до випадку підстроючимо Х2, сигнал на виході другого підсилювача 21 вання параметрів першого блока 13 формування позначимо KrUr, сигнал на виході другого суматора моделі-еталона вібратора до параметрів реально8 позначимо Х-і, то (в операційній формі) маємо го вібратора співвідношення (для спрощення не будемо рахуПри установці на рухомій платформі вібратора вати сигнал зворотного зв'язку з виходу блока 11 випробуваного об'єкту 5 на виході датчика 25 зузворотного зв'язку, який формується для регулюсилля формується сигнал, що находить через повання статичного положення рухомої системи вібслідовно з'єднані узгоджувальний підсилювач 27, ратора) п'ятий випрямляч 29 і п'ятий згладжу вальний фільтр 31 на вхід порогового елемента 32 KrUr+X1-CX2-X1)=Xl (1) абоКгиг=Х2-Хі, (2) При формуванні випрямленого значення цього fleXi=Wi1Yi,X2=W21Y2 сигналу більшим за сигнал, що визначає поріг включення порогового елемента 32, на виході поW-i, W 2 - передатні функції рухомої системи вірогового елемента 32 формується сигнал, що братора при установці на платформі випробуванонадходить на керувальний вхід третього ключа 37, го об'єкта 5 і при відсутності об'єкта на платформі замикаючи його При находженні на інформаційВІДПОВІДНО ний вхід третього ключа 37 імпульсів з виходу геНа вході підсилювача 9 струму маємо сигнал нератора 44 імпульсів, ці імпульси надходять на RlT x 9 =X 2 -Xi=R, (3) вхід першого тригера 42, установлюючи його в а на виході підсилювача 9 струму маємо сигнал нуль, тим самим розмикаються другий і п'ятий UBMX9=(X2-Xi)K9=R, (4) ключі 36 і 39 ВІДПОВІДНО, і на S-вхід другого тригера де Kg - коефіцієнт підсилення підсилювача 9 стру43, установлюючи його в одиницю, тим самим заму, R - сигнал, що визначається як силове наванмикаються перший і шостий ключі 35 і 40 ВІДПОВІДтаження на випробуваний об'єкт НО Тобто сигнал на виході підсилювача 9 струму формує задане силове навантаження на випробуПри цьому вихідний сигнал датчика 10 полований об'єкт 5 ження рухомої платформи вібратора, що формується при присутності на рухомій платформі виЯкщо на рухомій платформі вібратора відсутпробуваного об'єкту 5, находить через послідовно ній випробуваний об'єкт 5, то на виході датчика 25 з'єднані перший узгоджувальний підсилювач 26, зусилля відсутній сигнал, відсутній сигнал на вичетвертий випрямляч 28, четвертий згладжу вальході другого узгоджувального підсилювача 27, п'яний фільтр ЗО і замкнений перший ключ 35 на підтого випрямляча 29 і п'ятого згладжувального фінімальний вхід сьомого суматора 34, на підсумольтра 31 вувальний вхід якого находить вихідний сигнал На виході порогового елемента 32 присутній другого блока 22 формування моделі-еталона вібнуль, тому третій ключ 37 розімкнений, а четверратора після проходження через послідовно з'єдтий ключ 38 замкнений, тому що на виході елеменані третій випрямляч 23 і третій згладжувальний нта 41 «НІ» присутній не нульовий сигнал Імпульфільтр 24 си з виходу генератора 44 імпульсів надходять через замкнений четвертий ключ 38 на R-вхід друСигнал з виходу сьомого суматора 34 через гого тригера 43, підтверджуючи його нульовий замкнений шостий ключ 40 надходить на керувастан і на S-вхід першого тригера 42, установлюючи льний вхід другого блоку 22 формування моделійого в одиницю При цьому другий і п'ятий ключі еталона вібратора Відбувається підстроювання 36 і 39 ВІДПОВІДНО замикаються і вихідний сигнал параметрів блока 22 формування моделі-еталона шостого суматора 33 через замкнений п'ятий ключ вібратора в напрямку зменшення сигналу на вихо39 надходить на керувальний вхід першого блока ді сьомого суматора 34, що призводить до вико13 формування моделі-еталона вібратора, що не нання рівності сигналів у середньому на виходах враховує присутність випробуваного об'єкту на другого блоку 22 формування моделі-еталона віб 55078 14 13 ратора і першого узгоджу вального підсилювача вібратора і другого блока 22 формування моделі26 еталона вібратора повторні цикли підстроювання визначаються періодом формування імпульсів на Таким чином приходимо до випадку підстроювиході генератора 44 імпульсів і режимом наванвання параметрів блоку 22 формування моделітаження і розвантаження випробуваним об'єктом 5 еталона вібратора до параметрів реального вібрарухомої платформи вібратора, тобто появою імпутора разом з випробуваним об'єктом 5 льсних сигналів на виходах третього і четвертого Після проведення одного циклу підстроювання ключів 37 і 38 ВІДПОВІДНО першого блока 13 формування моделі-еталона Фіг.
ДивитисяДодаткова інформація
Назва патенту англійськоюElectrodynamic vibrator
Автори англійськоюPuz'ko Ihor Danylovych
Назва патенту російськоюЭлектродинамический вибратор
Автори російськоюПузько Игорь Данилович
МПК / Мітки
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Код посилання
<a href="https://ua.patents.su/7-55078-elektrodinamichnijj-vibrator.html" target="_blank" rel="follow" title="База патентів України">Електродинамічний вібратор</a>
Електродинамічний вібратор
Номер патенту: 40446
Опубліковано: 16.07.2001
Автори: Хворост Володимир Андрійович, Павловський Михайло Антонович, Пузько Ігор Данилович
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, підсилювач струму, вихід якого під'єднаний до обмотки рухомої циліндричної котушки, перший і другий суматори, коло зворотного зв'язку, що складається з послідовно з'єднаних датчика положення рухомої котушки і блока...
Електродинамічний вібратор
Номер патенту: 44517
Опубліковано: 15.02.2002
Автори: Пузько Ігор Данилович, Хворост Володимир Андрійович
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більше довжини повітряного зазору, яка жорстко з'єднана з платформою вібратора з випробуваним об'єктом, задавальний генератор, вихід якого під'єднаний до входу другого суматора через перший суматор, підсилювач струму, вихід якого під'єднаний до обмотки рухомої циліндричної...
Електродинамічний вібратор

Номер патенту: 45161
Опубліковано: 15.03.2002
Автори: Пузько Ігор Данилович, Хворост Володимир Андрійович
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, перший і другий суматори, підсилювач струму, перший і другий блоки диференціювання, коло зворотного зв'язку, що містить послідовно сполучені датчик переміщення рухомої циліндричної котушки і блок зворотного зв'язку,...
Електродинамічний вібратор
Номер патенту: 37999
Опубліковано: 15.05.2001
Автори: Павловський Михайло Антонович, Хворост Володимир Андрійович, Пузько Ігор Данилович
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Текст:
...R(p) на випробуваний об'єкт, а саме: 1) сформувати сигнал Х2, операційним зображенням якого є постійного струму, рухому циліндричну котушку 4 з платформою (на кресленні не позначена) та випробуваним об'єктом 5, закріпленим на платформі, задавальний генератор 6, перший суматор 7, другий суматор 8, підсилювач 9 струму, да тчик 10 положення рухомої котушки, блок 11 зворотного зв'язку, підсилювач 12 з регульованим коефіцієнтом підсилення, блок...
Електродинамічний вібратор
Номер патенту: 38228
Опубліковано: 15.05.2001
Автори: Павловський Михайло Антонович, Пузько Ігор Данилович, Хворост Володимир Андрійович
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Формула / Реферат:
Дата прийняття рішення 28.12.2000р.(21) 2000063371(54) (57) Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопровода рухому котушку, довжина якої більше довжини повітряного зазору, задавальний регенератор, вихід якого сполучений з входом першого підсилювача, послідовно з’єднане з обмоткою рухомої котушки, і платформу, на...
Попередній патент: Утилізаційний теплообмінник
Наступний патент: Спосіб виявлення негативного впливу радіаційного забруднення на організм великої рогатої худоби
Випадковий патент: Спосіб одержання коробчаcтої стрічки каркаса безкорпусного перфоратора