Спосіб керування взаємозв’язаними електроприводами руху чотириколісної конструкції
Номер патенту: 56746
Опубліковано: 25.01.2011
Формула / Реферат
Спосіб керування взаємозв'язаними електроприводами руху чотириколісної конструкції, що складається з задання керуючих сигналів на електроприводи, вимірювання їх повного вектора стану та формування керуючих сигналів на кожний електропривід, який відрізняється тим, що задають параметри руху центра мас конструкції (швидкість в напрямку руху, відхилення від цього напрямку, кут повороту конструкції відносно напряму руху), подають керуючий сигнал задання швидкості в напрямку руху на електропривід першого колеса, під дією якого створюється рушійна сила цього колеса, вимірюють ультразвуковими датчиками положення за координатами переміщення у напрямку руху та відхилення від цього напрямку для кожного колеса окремо для чотириколісної конструкції, на підставі заданих параметрів руху центра мас та виміряних координат формують для центра мас конструкції, потрібні прискорення переміщення у напрямку руху, прискорення відхилення від цього напрямку та прискорення кута повороту чотириколісної конструкції, на підставі чого формують індивідуальні керуючі сигнали задання рушійних сил електроприводам другого, третього, четвертого коліс та подають на електроприводи другого, третього, четвертого коліс чотириколісної конструкції, які з урахуванням показників датчиків кутової швидкості коліс створюють рушійні сили другого, третього, четвертого коліс чотириколісної конструкції.
Текст
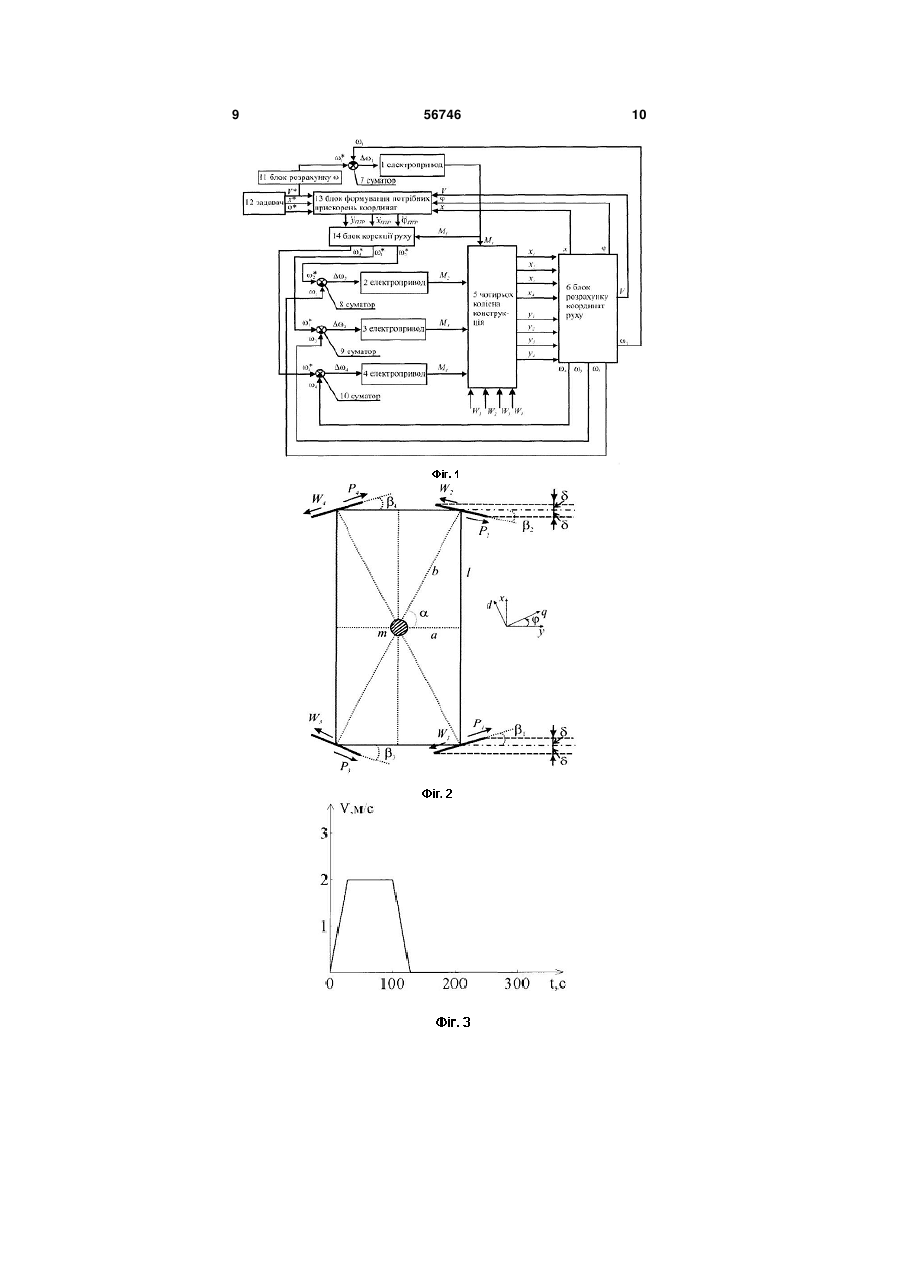
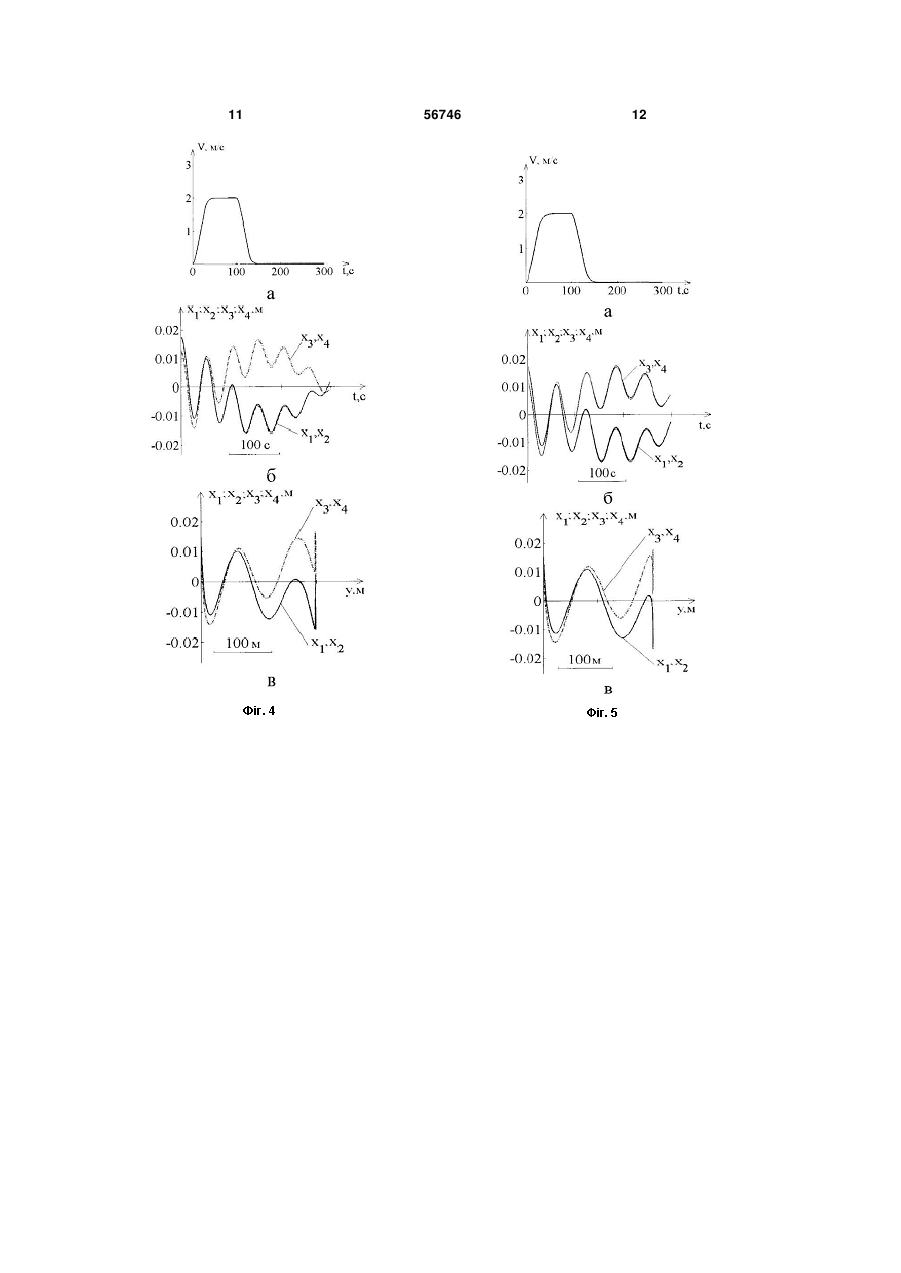
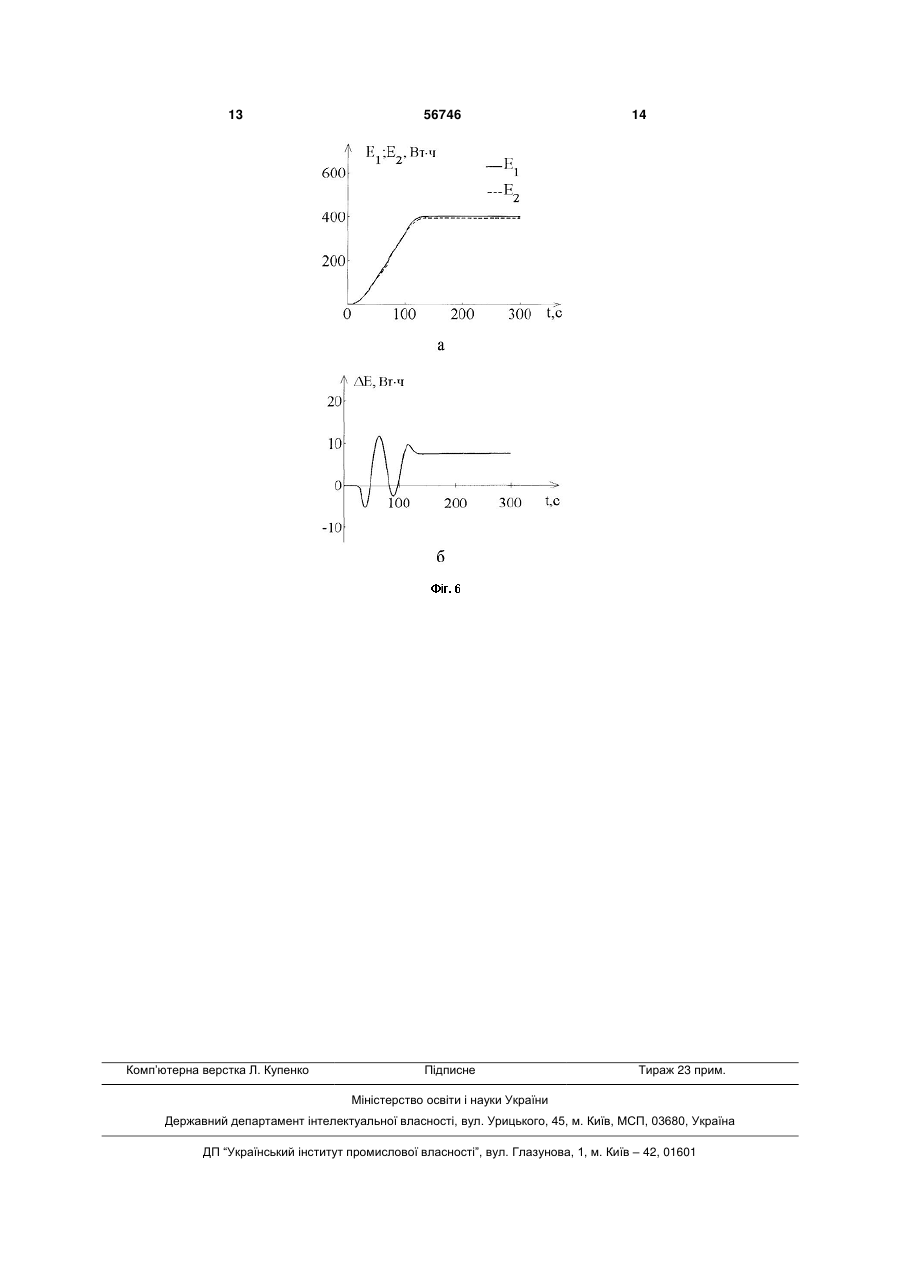
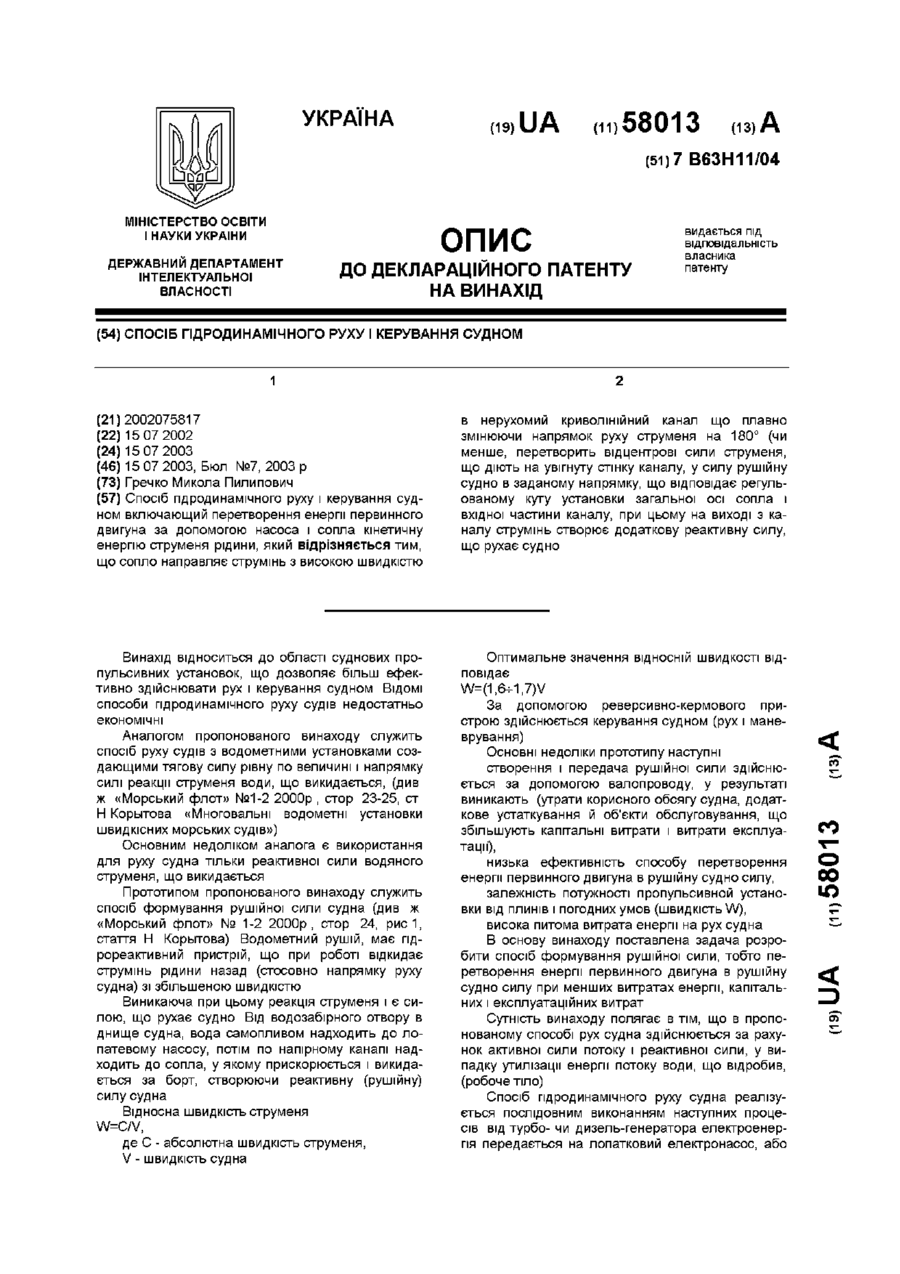
Спосіб керування взаємозв'язаними електроприводами руху чотириколісної конструкції, що складається з задання керуючих сигналів на електроприводи, вимірювання їх повного вектора стану та формування керуючих сигналів на кожний електропривід, який відрізняється тим, що задають параметри руху центра мас конструкції (швидкість в напрямку руху, відхилення від цього напрямку, кут повороту конструкції відносно напряму руху), подають керуючий сигнал задання швидкості в напрямку руху на електропривід першого колеса, 3 ними електроприводами не дозволяє забезпечити заданий рух чотирьох колісної конструкції одночасно за трьома координатами (по осям x, y та куту ), з заданою швидкістю, без повернень та без торкання ребордами коліс до рейок при наявності кутів перекосу коліс не рівних нулю. Це в свою чергу призводить до механічного зносу коліс й рейок та збільшення енерговитрати електроприводу. В основу корисної моделі поставлено завдання розробки способу керування взаємозв'язаними електроприводами чотирьохколісної конструкції для підтримки заданої швидкості руху без повернень та торкання ребордами коліс до рейок, що призводить до механічного зносу коліс й рейок та зменшення енерговитрат електроприводу. Вирішення цієї задачі досягається тим, що спосіб керування взаємозв'язаними електроприводами руху чотирьохколісної конструкції, що складається з завдання керуючих сигналів на електроприводи, вимірювання їх повного вектору стану та формування керуючих сигналів на кожний електропривод. Причому задають параметри руху центра мас конструкції (швидкість в напрямку руху, відхилення від цього напрямку, кут повороту конструкції відносно напряму руху), подають керуючий сигнал завдання швидкості в напрямку руху на електропривод першого колеса, під дією якого створюється рушійна сила цього колеса, вимірюють ультразвуковими датчиками положення за координатами переміщення у напрямку руху, та відхилення від цього напрямку для кожного колеса окремо для чотирьохколісної конструкції, на підставі заданих параметрів руху центра мас та виміряних координат формують для центра мас конструкції потрібні прискорення переміщення у напрямку руху, прискорення відхилення від цього напрямку та прискорення кута повороту чотирьохколісної конструкції на підставі чого формують індивідуальні керуючі сигнали завдання рушійних сил електроприводам другого, третього, четвертого коліс та подають на електроприводи другого, третього, четвертого коліс чотирьохколісної конструкції, які з урахуванням показників датчиків кутової швидкості коліс створюють рушійні сили другого, третього, четвертого коліс чотирьох колісної конструкції. При подачі керуючого сигнала завдання на електропривод першого колеса і при контроле параметрів руху чотирьохколісної конструкції формуються керуючі імпульси завдання на електроприводи другого, третього, четвертого коліс, що дозволяє достягти точної відробки сигнала завдання руху, що призводить до того, що чотирьохколісної конструкції рухається без повернень та торкання ребордами коліс до рейок при наявності кутів перекосу коліс не рівних нулю. Це в свою чергу забезпечує зменшення механічного зносу коліс й рейок та енерговитрат електропривода. Таким чином, нові ознаки при взаємодії з відомими ознаками забезпечують виявлення нових технічних властивостей - шляхом конструкційних удосконалень розробленого способу керування взаємозв'язаними електроприводами руху чотирьохколісної конструкції, який забезпечує рух чо 56746 4 тирьохколісної конструкції без взаємодії коліс з рейками із поліпшеними експлуатаційними характеристиками, тобто із зменшенням механічного зносу коліс й рейок та енерговитрат електроприводу. Ідея корисної моделі пояснюється на Фіг.1, де зображена функціональна схема системи керування взаємозв'язаними електроприводами руху чотирьох колісної конструкції без взаємодії коліс з рейками. На графічному зображенні прийняти наступні позначення: 1, 2 , 3 , 4 - задане значення кутової швидкості першого, другого, третього та четвертого електродвигунів; 1, 2, 3, 4 - виміряне зна чення кутової швидкості першого, другого, третього та четвертого електродвигунів; 1, 2, 3 , 4 - різниця між заданим та виміряним значеннями кутової швидкості першого, другого, третього та четвертого електродвигунів; M1,M2,M3,M4 - електромагнітний момент першого, другого, третього та четвертого електродвигунів; W1, W2, W3, W4 - сили опору чотирьохколісної конструкції; y1, y2, y3, y4 - виміряні значення положення за координатою «у» переміщення у напрямку руху кожного колеса чотирьохколісної конструкції; x1, x2, x3, x4 - виміряні значення відхилення від напрямку руху для кожного колеса; V та V задане та виміряне значення швидкості центра мас чотирьохколісної конструкції в напрямку руху; та - задане та виміряне значення кута повороту центра мас чотирьохколісної конструкції відносно напрямку руху; x та x - задане та виміряне значення відхилення центра мас чотирьохколісної конструкції від напрямку руху; ПТР, ПТР, ПТР - потрібні прискорення для y x центра мас конструкції: прискорення переміщення у напрямку руху, прискорення відхилення від цього напрямку та прискорення кута повороту чотирьохколісної конструкції. Функціональна схема на Фіг.1 містить: електропривод 1 першого колеса; електропривод 2 другого колеса; електропривод 3 третього колеса; електропривод 4 четвертого колеса; чотирьохколісну конструкцію 5 (додатково представлена на Фіг.2); блок розрахунку координат руху 6; суматори 7, 8, 9, 10; блок розрахунку 11, який розраховує завдання кутової швидкості 1 по формулі: kp 1 V , де R1 - радіус 1-го колеса, k p - пеR1 редавальне число редуктора; задавач 12; блок формування потрібних прискорень координат 13; блок корекції руху 14. До входу задавач 12 приєднано пульт керуванням рухом чотирьохколісної конструкції (на схемі не показано), вихід V з'єднано з блоком розрахунку 11, вихід якого підключено на перший вхід суматора 7, на другий вхід суматора 7 5 приєднано вихід 1 блока розрахунку координат руху 6, вихід суматора 7 1 приєднано на вхід електропривод 1. Вихід M1 електропривод 1 підключено до першого колеса чотирьохколісної конструкцію 5 через редуктор (на схемі не показано), а також до входу M1 блоку корекції руху 14. До входів блока розрахунку координат руху 6 x1, x2, x3, x4 та y1, y2, y3, y4 приєднано виходи: чотирьохколісної конструкцію 5 від ультразвукових датчиків на кожному колесі (на схемі не показано). Виходи V, , x блока розрахунку координат руху 6 приєднано до входів: V, , x блока формування потрібних прискорень координат 13. Виходи: V, x, задавача 12 приєднано також до входів: V , x , блока формування потрібних прискорень координат 13. Виходи блока формування потрібних прискорень координат 13 підключено до входів: ПТР, ПТР, ПТР блоку корекції руху 14. y x Вихід 2 блоку корекції руху 14 підключено на перший вхід суматора 8, на другий вхід суматора 8 приєднано вихід 2 блока розрахунку координат руху 6, вихід суматора 8 2 приєднано на вхід електропривод 2. Вихід M2 електропривод 2 підключено до другого колеса чотирьохколісної конструкцію 5 через редуктор (на схемі не показано). Вихід 3 блоку корекції руху 14 підключено на перший вхід суматора 9, на другий вхід суматора 9 приєднано вихід 3 блока розрахунку координат руху 6, вихід суматора 9 3 приєднано на вхід електропривод 3. Вихід M3 електропривод 3 підключено до третього колеса чотирьохколісної конструкцію 5 через редуктор (на схемі не показано). Вихід 4 блоку корекції руху 14 підключено на перший вхід суматора 10, на другий вхід суматора 10 приєднано вихід 4 блока розрахунку координат руху 6, вихід суматора 10 4 приєднано на вхід електропривод 4. Вихід M 4 електропривод 4 підключено до четвертого колеса чотирьохколісної конструкцію 5 через редуктор (на схемі не показано). Електропривод (1-4) кожного колеса складається з асинхронного двигуна, автономного інвертора напруги з широтно-імпульсною модуляцією, системи керування інвертора, системи векторного регулювання струму, регуляторів потокозчеплення та швидкості, блоку ідентифікації параметрів, датчиків струму, напруги та швидкості, координатного перетворювача [3]. Чотирьохколісна конструкція 5 представлена на Фіг.2, де Pi - рушійна або гальмівна сила, яка , розвивається і- им колесом, i 12,3,4 - номер ко леса; Wi - сила опору руху і - ому колесу чотирьо 56746 6 хколісної конструкції; i - кут встановленого перекосу і - ого колеса; m - маса чотирьохколісної конструкції; a - половина бази чотирьохколісної конструкції; b - відстань від центру мас чотирьохколісної конструкції до коліс; l - половина ширини чотирьохколісної конструкції; - конструктивний кут чотирьохколісної конструкції ( arctgl / a ); - допустиме відхилення від напрямку руху коліс до торкання ребордами рейок. Чотирьохколісна конструкція має три ступені свободи: дві поступальні та одну обертальну. Рух конструкції розглядається в нерухомій системі координат «х-у», яка прив'язана до центра мас цієї конструкції. Чотирьохколісна конструкція містить жорстку конструкцію з чотирма колесами з існуючими кутами перекосу коліс, кожне колесо через редуктор з'єднано з електродвигуном, причому установлені датчики положення на кожному колесі; Запропонований спосіб керування взаємопов'язаними електроприводами руху чотирьохколісної конструкції функціонує таким чином. Від пульта керуванням рухом чотирьохколісної конструкції подають керуючий сигнал завдання швидкості V центра мас чотирьохколісної конструкції в напрямку руху тільки на електропривод першого колеса, котрий створює електромагнітний момент M1 й, отже, рушійну силу P1 першого колеса. Вимірюють ультразвуковими датчиками положення за координатами переміщення у напрямку руху: y1, y2, y3 , y 4 , та відхилення від цього напрямку для кожного колеса окремо для чотирьохколісної конструкції: x1, x2, x3, x4 . Ці виміряні значення положення за координатами переміщення поступають в блок розрахунку координат руху 6, в якому розраховуються значення: швидкості V центра мас чотирьохколісної конструкції в напрямку руху, відхилення х від цього напрямку, кут повороту конструкції відносно напряму руху, а також отримують значення кутових швидкостей кожного колеса: 1, 2, 3, 4 з урахуванням показників датчиків кутової швидкості коліс. На підставі заданих параметрів руху центра мас та виміряних координат: швидкість в напрямку руху, відхилення від цього напрямку, кут повороту конструкції відносно напряму руху, формують для центра мас чотирьохколісної конструкції потрібні прискорення переміщення у напрямку руху ПТР , y прискорення відхилення від цього напрямку ПТР x та прискорення кута повороту чотирьохколісної конструкції ПТР в блоці формування потрібних прискорень координат 13, які розраховуються за формулами [4]. Після розрахунку потрібних прискорень коор динат ПТР, ПТР, ПТР вони поступають до блоку y x корекції руху 14, який формує індивідуальні керуючі сигнали 2 , 3 , 4 завдання рушійних сил електроприводам другого, третього, четвертого коліс за формулами [4]. Ці індивідуальні керуючі сигнали завдання ру 7 шійних сил електроприводам другого, третього, четвертого коліс подають на електроприводи другого, третього, четвертого коліс чотирьохколісної конструкції, які з урахуванням показників датчиків кутової швидкості коліс створюють рушійні сили другого, третього, четвертого коліс P2,P3 ,P4 , чотирьохколісної конструкції. У блоці корекції руху 14 з визначеним інтервалом здійснюється розрахунок рушійних сил P2,P3,P4 [4], які дозволяють оперативно корегувати сигнали завдання рушійних сил. У якості чотирьохколісної конструкції розглядався мостовий кран (вантажопідйомністю 20/5 т) з m 47200 наступними параметрами: кг; J 2,21 10 6 кгм ; l 14,25 м; a 2,5 м; b 14,47 м; 0,38 рад; кути встановленого перекосу ко2 ліс: 1 0,009 рад, 2 0,005 рад, 3 0,003 рад, 4 0,003 рад. Використовуються двигуни 4А132S6УЗ з наступними параметрами: Рд.н=5,5 кВт, Usнф=220 В, Іsнф=10,4 А, н 1007 с-1, , Мн 492 Нм, z=3, амплітуда номінального фаз, ного потокозчеплення ротора rн 0,889 Вб, k p 14 . На Фіг.3 показано завдання швидкості мостового крана в напрямку руху. Задавалися різні значення сил опору колесам мостового крана: W 800 Н, W2 640 Н, W 880 1 W3 720 Н, 4 Н і радіуси коліс R1 0,385 м, R2 R3 R4 0,35 м. Максимальне відхилення від напрямку руху до взаємодії реборд коліс з рейками складає 15 мм. На Фіг. 4 і Фіг. 5 представлені результати руху мостового крана відповідно без вантажу та з вантажем: а - швидкість центра мас мостового крана в напрямку руху; б - відхилення від напряму руху центрів коліс від середньої лінії рейки; в - залежність відхилення коліс від переміщення в напрямку руху. При початковому відхиленні центра мас мостового крана 0,015 м і початковому куту повороту мостового крана 0,001 рад, джерелі енергії кінцевої потужності (струми двигунів не перевищують 56746 8 допустимих значень), відхилення від напрямку руху центрів коліс знаходяться в межах 0,015 м (Фіг.4,б і Фіг. 5,б), швидкість центру мас мостового крана в напрямку руху досягає заданого значення 2 м/с (Фіг.4,а і Фіг.5,а), кут повороту мостового крана складає 2,6 10 3 рад, залежність відхилення коліс від переміщення в напрямку руху (Фіг.4,в і Фіг.5,в). На Фіг.6,а зображені витрати енергії при переміщенні мостового крана на 200 метрів, де Е1 та Е2 - відповідно витрати енергії без використання запропонованої системи керування та з системою керування. На Фіг.6,б надано графік зниження витрат енергії у часі, відповідно якого економія енергії (за 150 секунд) склала 8 Втч. В середньому у рік економія енергії склала 405 кВтч. Використання цього способу дозволить значно зменшити механічний знос коліс й рейок при зниженні енерговитрат електроприводу. Джерела інформації: 1. Приемопередающее устройство [Текст]: пат. 2185019 Рос. Федерация: МПК7 Н 02 Р 5/46 / Тарарыкин С. В., Тютиков В. В.; заявитель и патентообладатель Ивановский гос. энергетич. ун-т; заявл. 06.04.01; опубл. 10.07.02. 2. Приемопередающее устройство [Текст]: пат. 2316886 Рос. Федерация: МПК7Н 02 Р 5/46, Н 02 Р 5/69 / Тарарыкин С. В., Иванков В. А., Тютиков В. В., Красильникъянц Е. В. ; заявитель и патентообладатель Федеральное агентство по образованию Гос. образовательное учреждение высшего профессионального образования «Ивановский гос. энергетич. ун-т им. В. И. Ленина»; заявл. 27.04.06; опубл. 10.02.08, Бюл. №4. 3. Пивняк Г. Г. Современные частотнорегулируемые асинхронные электроприводы с широтно-импульсной модуляцией [Текст] / Г. Г. Пивняк, А. В. Волков. - Днепропетровск: Национ. горный университет, 2006. - С. 270-300. 4. Орловский И. А., Управление взаимосвязанным асинхронным электроприводом мостового крана для перемещения моста без взаимодействия реборд колес с рельсами [Текст] / И. А. Орловский, Ю. С. Бут // Радіоелектроніка, інформатика, управління. - 2009. - №2 - С. 144-151. 9 56746 10 11 56746 12 13 Комп’ютерна верстка Л. Купенко 56746 Підписне 14 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of interdependent electric drives of four-wheel construction motion
Автори англійськоюOrlovskyi Ihor Anatoliiovych, But Yuliia Serhiivna
Назва патенту російськоюСпособ управления взаимосвязанными электроприводами движения четырехколесной конструкции
Автори російськоюОрловский Игорь Анатольевич, Бут Юлия Сергеевна
МПК / Мітки
МПК: H02P 5/46
Мітки: керування, конструкції, електроприводами, чотириколісної, спосіб, взаємозв'язаними, руху
Код посилання
<a href="https://ua.patents.su/7-56746-sposib-keruvannya-vzaehmozvyazanimi-elektroprivodami-rukhu-chotirikolisno-konstrukci.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування взаємозв’язаними електроприводами руху чотириколісної конструкції</a>
Спосіб гідродинамічного руху і керування судном
Номер патенту: 58013
Опубліковано: 15.07.2003
Автор: Гречко Микола Пилипович
МПК: B63H 11/00
Мітки: спосіб, керування, гідродинамічного, руху, судном
Формула / Реферат:
Спосіб гідродинамічного руху і керування судном, що включає перетворення енергії первинного двигуна за допомогою насоса і сопла в кінетичну енергію струменя рідини, який відрізняється тим, що за допомогою сопла направляють струмінь з високою швидкістю в нерухомий криволінійний канал, що плавно змінюючи напрямок руху струменя на кут не більший за 180°, перетворює відцентрові сили струменя, що діють на увігнуту стінку каналу, у силу рушійну...
Пристрій для автоматичного керування і регулювання руху самохідної машини по рядках рослин

Номер патенту: 56641
Опубліковано: 15.05.2003
Автори: Білик Стефанія Григорівна, Гевко Іван Богданович
МПК: A01B 69/04
Мітки: машини, руху, регулювання, самохідної, керування, рослин, пристрій, автоматичного, рядках
Формула / Реферат:
Пристрій для автоматичного керування і регулювання руху самохідної машини по рядках рослин, що містить керований міст з колесами, на якому встановлений гідроциліндр, корпус якого шарнірно з'єднаний з керованим мостом, а шток через тягу зв'язаний з рульовою трапецією повороту коліс, а також копіюючий щуп, зв’язаний з помпою-дозатором автомата, кермо, зв'язане з помпою-дозатором керма, гідросистему, виконану у вигляді масляного бака, помпи,...
Пристрій для керування електроприводом і швидкістю руху акумуляторного рудникового електровоза

Номер патенту: 60932
Опубліковано: 15.10.2003
Автори: Гураль Василь Володимирович, Калус Костянтин Якович, Іван Стоілов, Коваленко Павло Михайлович, Мєнта Мєнтєшєв, Кирил Джустров
МПК: B60L 15/20
Мітки: пристрій, керування, рудникового, електроприводом, руху, електровоза, швидкістю, акумуляторного
Формула / Реферат:
1. Пристрій для керування електроприводом і швидкістю руху акумуляторного рудникового електровоза, що містить акумуляторну батарею, до виходу якої підключені елементи кола тягових двигунів, датчик напруги акумуляторної батареї, датчики швидкості тягових двигунів, який відрізняється тим, що у коло тягових двигунів додатково, через автоматичний роз'єднувач, вхід якого з'єднаний з виходом акумуляторної батареї, та головний контактор, підключені...
Пристрій для збільшення сил зчеплення коліс транспортного засобу з дорожнім покриттям при поворотах на високих швидкостях руху
Номер патенту: 29748
Опубліковано: 25.01.2008
Автори: Черепащук Альберт Васильович, Лук'янчук Микола Романович
МПК: B62D 37/00
Мітки: швидкостях, високих, пристрій, засобу, дорожнім, збільшення, коліс, зчеплення, покриттям, сіль, руху, транспортного, поворотах
Формула / Реферат:
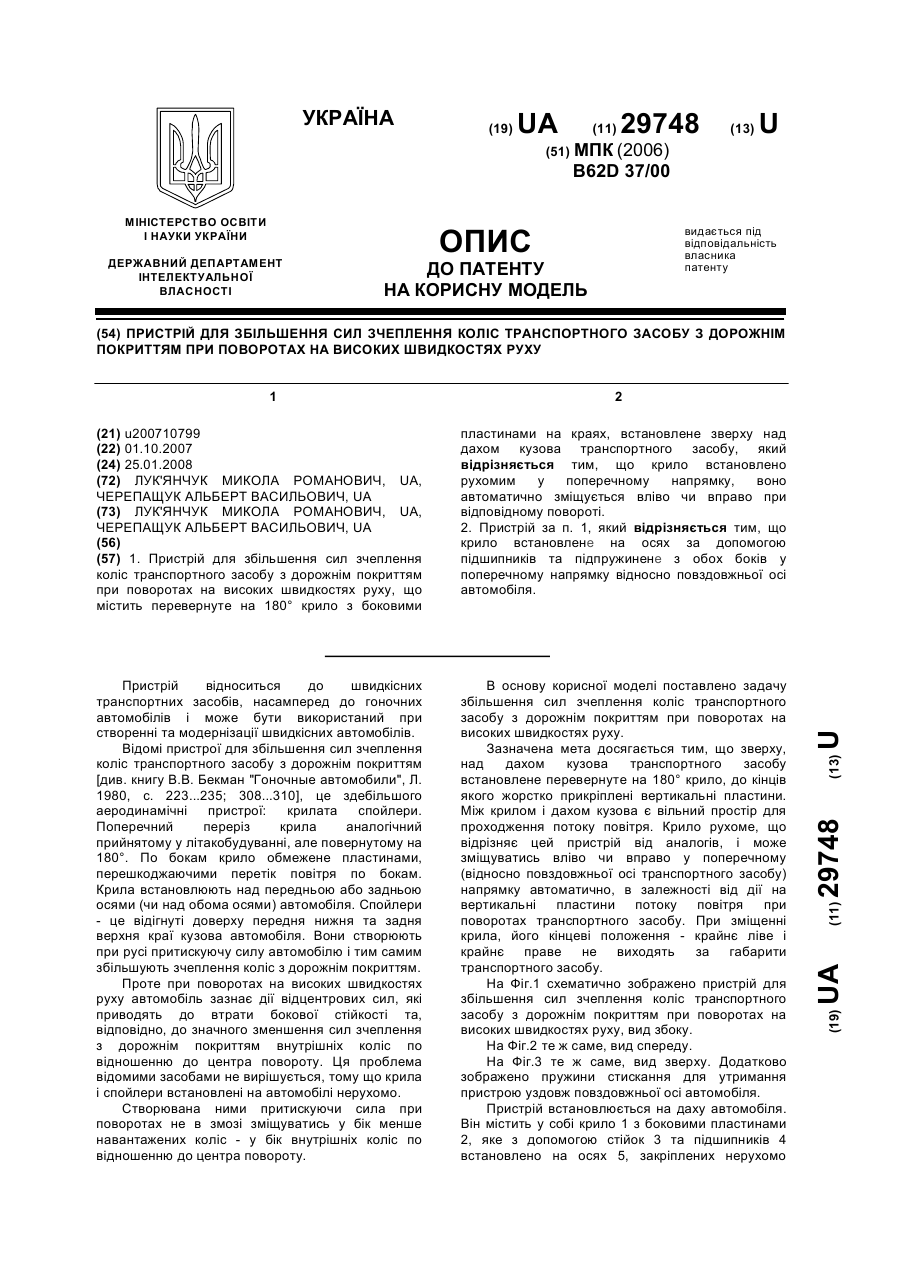
1. Пристрій для збільшення сил зчеплення коліс транспортного засобу з дорожнім покриттям при поворотах на високих швидкостях руху, що містить перевернуте на 180° крило з боковими пластинами на краях, встановлене зверху над дахом кузова транспортного засобу, який відрізняється тим, що крило встановлено рухомим у поперечному напрямку, воно автоматично зміщується вліво чи вправо при відповідному повороті.2. Пристрій за п. 1, який...
Спосіб контролю коліс під час руху рухомого складу
Номер патенту: 18779
Опубліковано: 15.11.2006
Автори: Войтенко Володимир Панасович, Войтенко Галина Олегівна, Осенін Юрій Іванович
МПК: B61K 9/00
Мітки: складу, спосіб, рухомого, контролю, руху, коліс
Формула / Реферат:
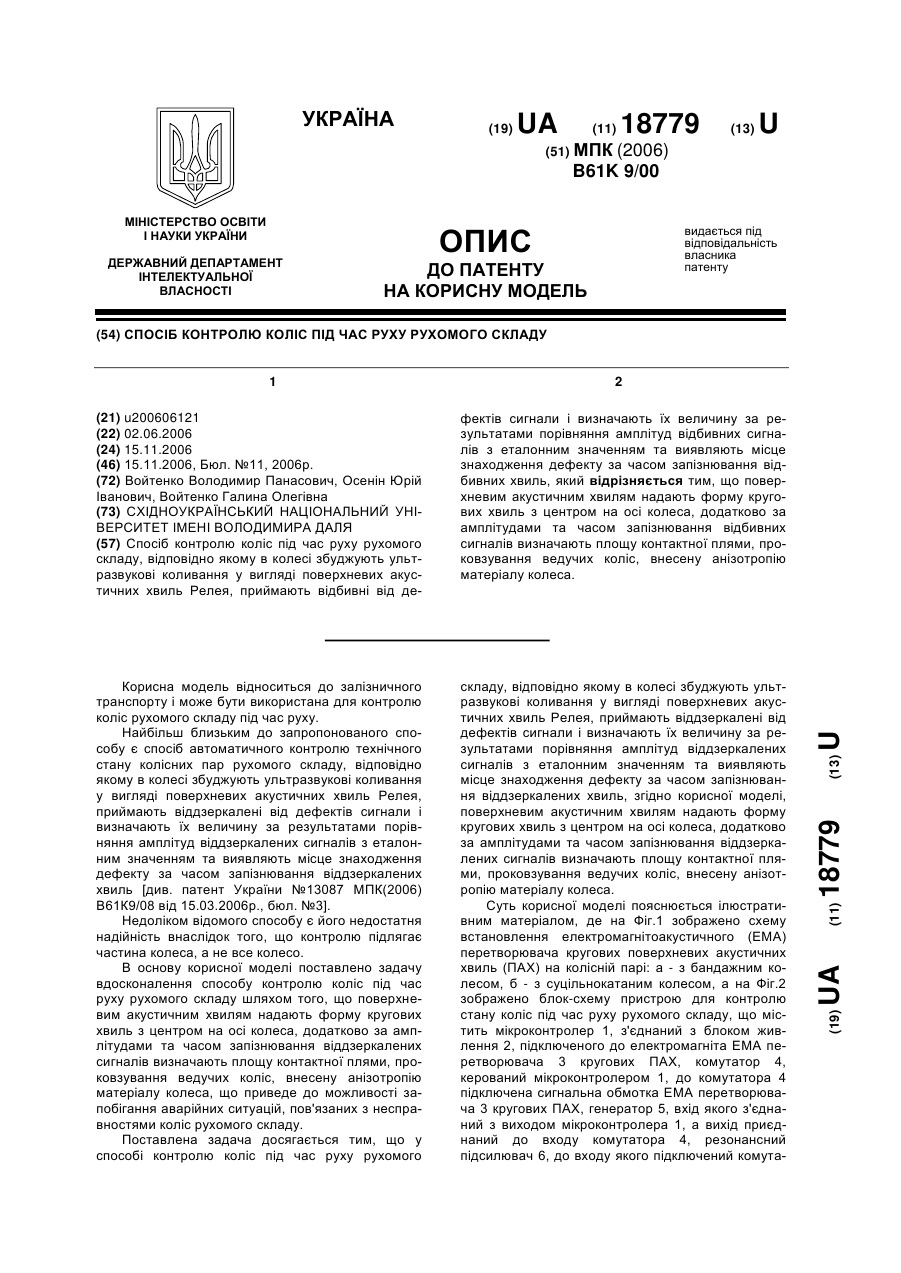
Спосіб контролю коліс під час руху рухомого складу, відповідно якому в колесі збуджують ультразвукові коливання у вигляді поверхневих акустичних хвиль Релея, приймають відбивні від дефектів сигнали і визначають їх величину за результатами порівняння амплітуд відбивних сигналів з еталонним значенням та виявляють місце знаходження дефекту за часом запізнювання відбивних хвиль, який відрізняється тим, що поверхневим акустичним хвилям надають...