Спосіб ультразвукового контролю головки рейки
Номер патенту: 67872
Опубліковано: 15.07.2004
Автори: Луценко Геннадій Геннадійович, Козак Андрій Олександрович
Формула / Реферат
1. Спосіб ультразвукового контролю головки рейки, який полягає в тому, що на поверхню кочення головки рейки на її поздовжній осі встановлюють першу та другу пари похилих перетворювачів з ідентичними параметрами, що розгорнуті під однаковими гострими кутами відносно поздовжньої осі рейки, переміщують перетворювачі вздовж поздовжньої осі рейки, випромінюють та приймають ультразвукові коливання в заданих часових зонах та по параметрах прийнятих коливань роблять висновок про наявність дефектів, який відрізняється тим, що спільно з першою та другою парами перетворювачів встановлюють третю та четверту пари з ідентичними параметрами, що розгорнуті в протилежному, щодо вказаних пар, напрямку вздовж поздовжньої осі рейки, кути введення ультразвукових коливань в метал рейки і кути розгортання першої та третьої пари перетворювачів визначають з умови перетину осей ультразвукових променів зон відбиття від радіусного переходу бічної та нижньої граней головки рейки, на поздовжній осі поверхні кочення відстань між першою та другою парою, а так само між третьою і четвертою парою перетворювачів одночасно з кутами вводу ультразвукових коливань та кутами розгортання другої та четвертої пар вибирають з умови прийому сигналів від дефектів у вигляді поперечних тріщин у бічних частинах головки рейки, відстань між встановленою першою та другою парою перетворювачів та встановлюваною третьою та четвертою парою визначають з умови прийому сигналів, перевідбитих від зон радіусного переходу бічної та нижньої граней головки рейки або від поздовжніх дефектів, а про наявність та орієнтацію дефектів роблять висновок по спільному аналізу прийнятих перетворювачами сигналів.
2. Спосіб ультразвукового контролю головки рейки за п. 1, який відрізняється тим, що луно-сигнали від можливих дефектів виділяють у п'ятьох часових зонах, перша з яких призначена для прийому луно-сигналів від дефектів при прозвучуванні їх прямим ультразвуковим променем, друга зона - для прийому луно-сигналів від дефектів у бічній грані головки рейки при прозвучуванні їх однократно відбитим від радіусного переходу бічної та нижньої граней головки рейки ультразвуковим променем, третя зона - для прийому дзеркально відбитих сигналів від дефектів у бічних частинах головки рейки, четверта зона - для прийому дзеркально відбитих сигналів від кутового відбивача, утвореного поперечною тріщиною та поверхнею кочення або горизонтальною тріщиною, п'ята зона - для прийому сигналів, перевідбитих від зон радіусного переходу бічної та нижньої граней головки рейки, або від поздовжніх дефектів, за рівнем яких також роблять висновок про якість акустичного контакту та працездатність дефектоскопа, а розташування тріщини в головці рейки та її орієнтацію визначають по спільному аналізу прийнятих сигналів.
Текст
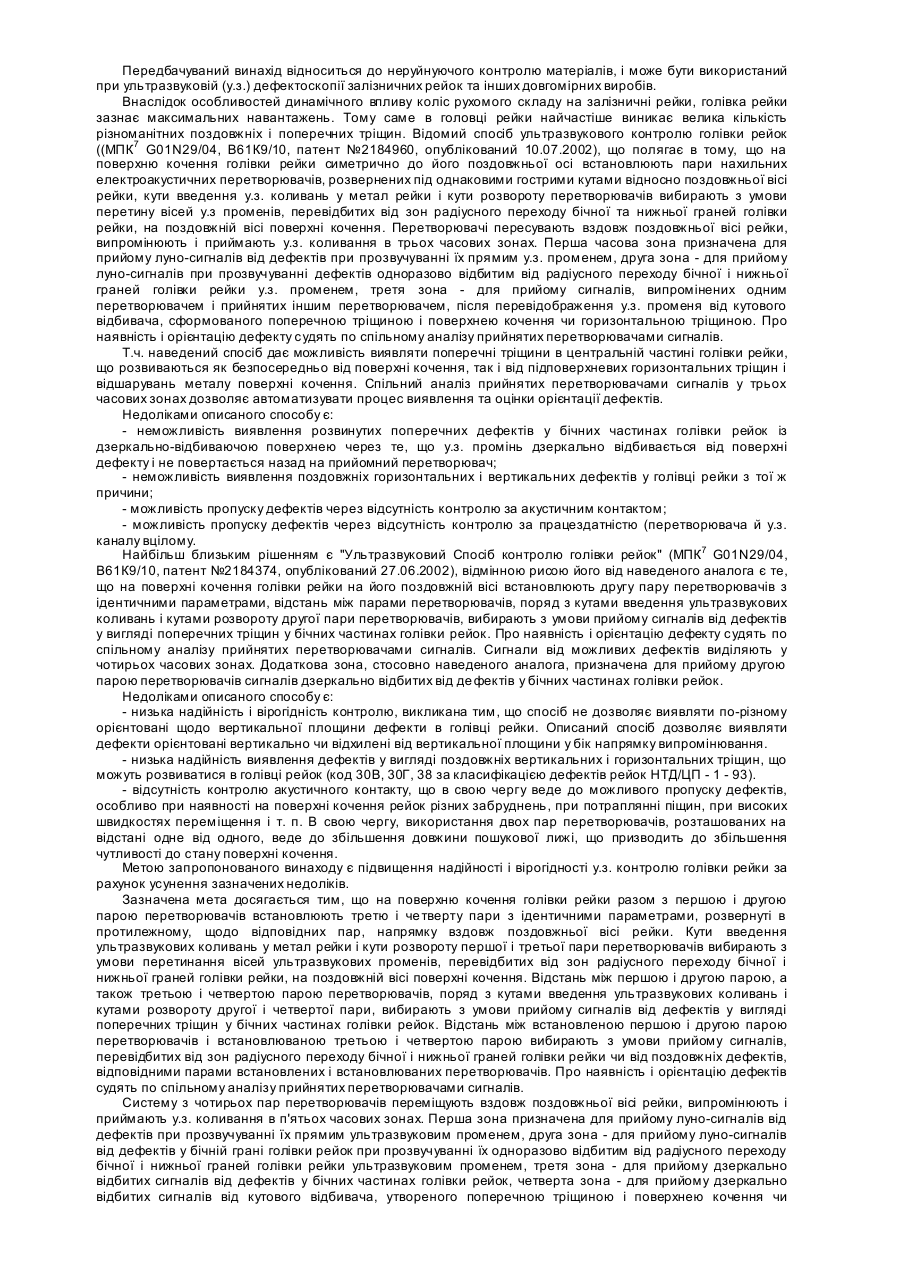
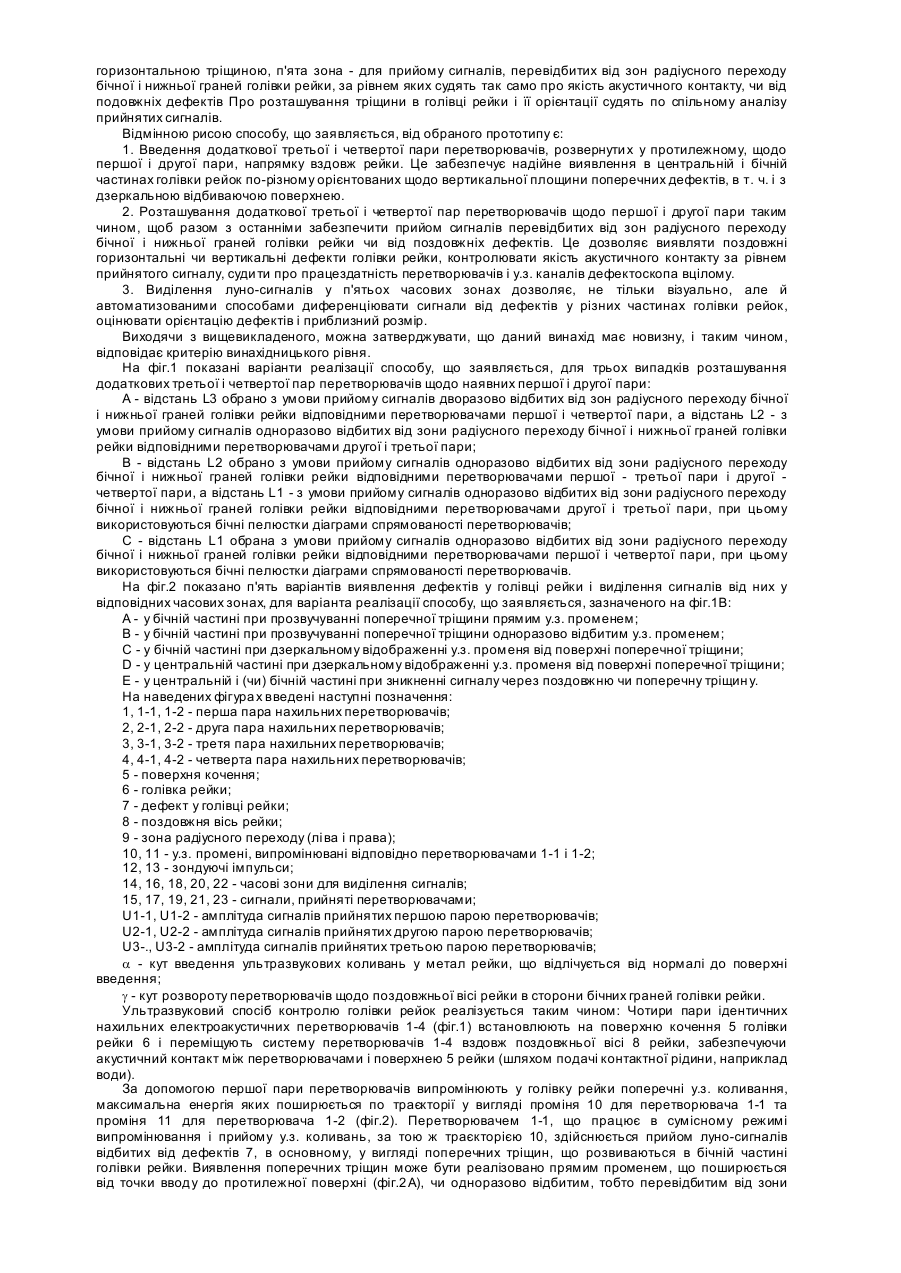
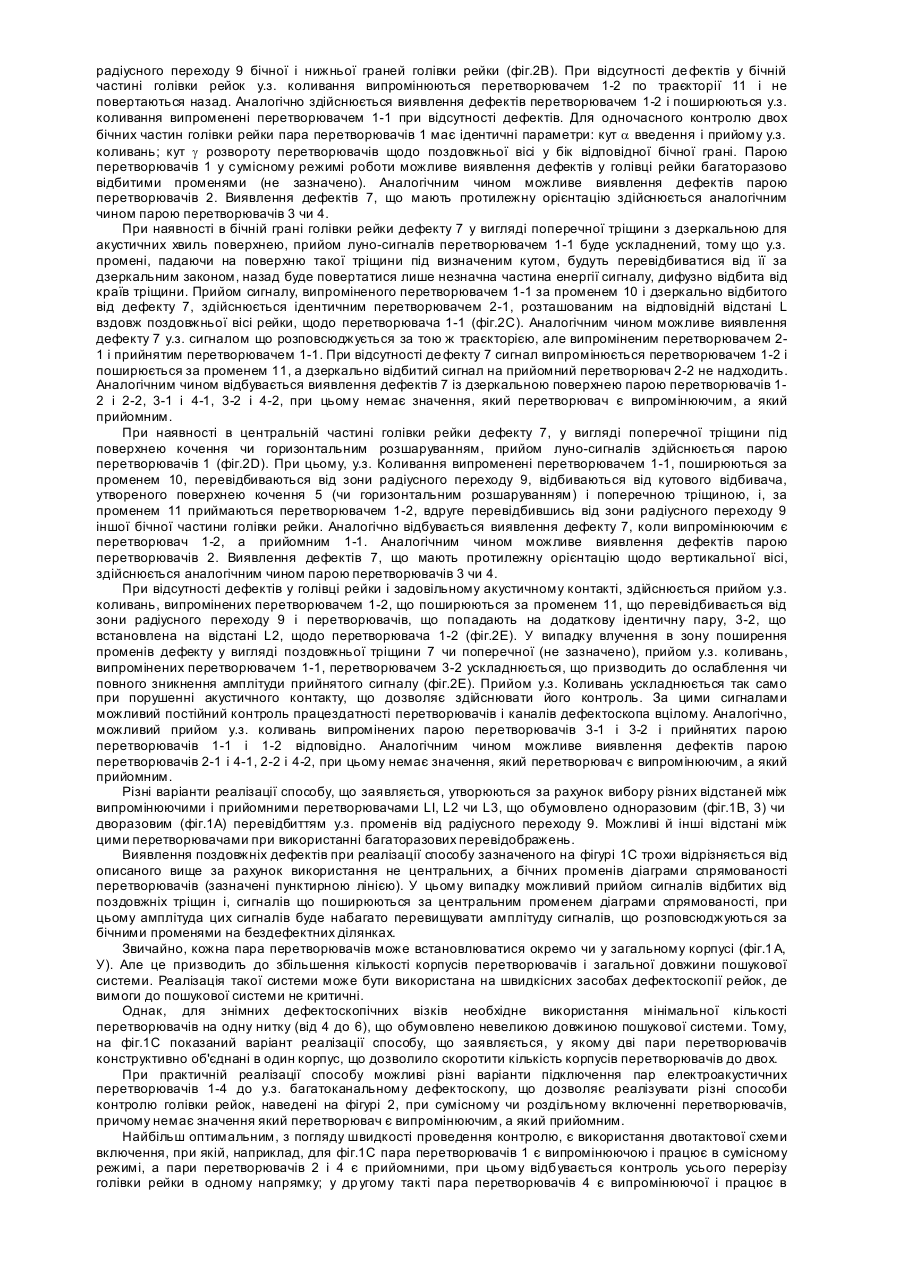
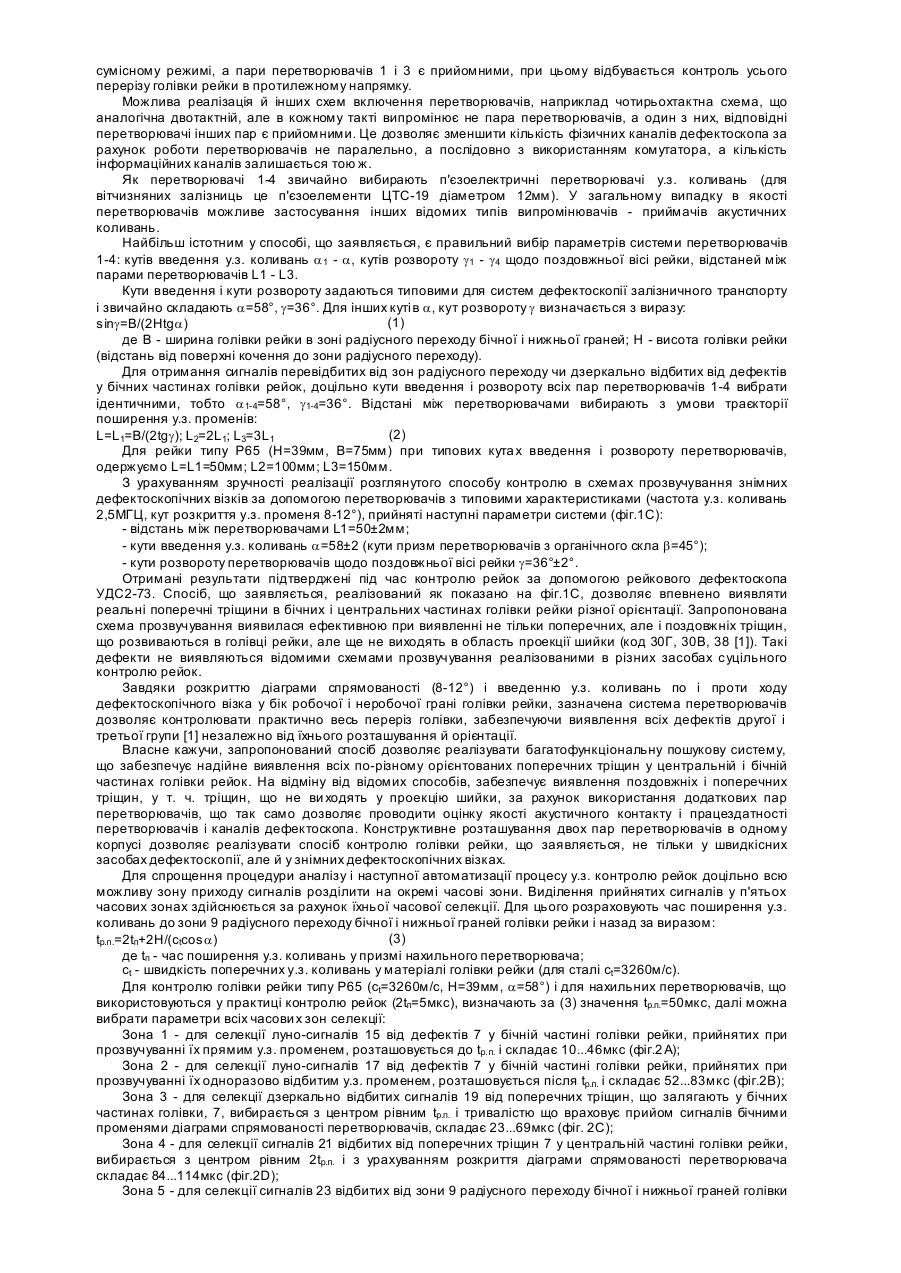
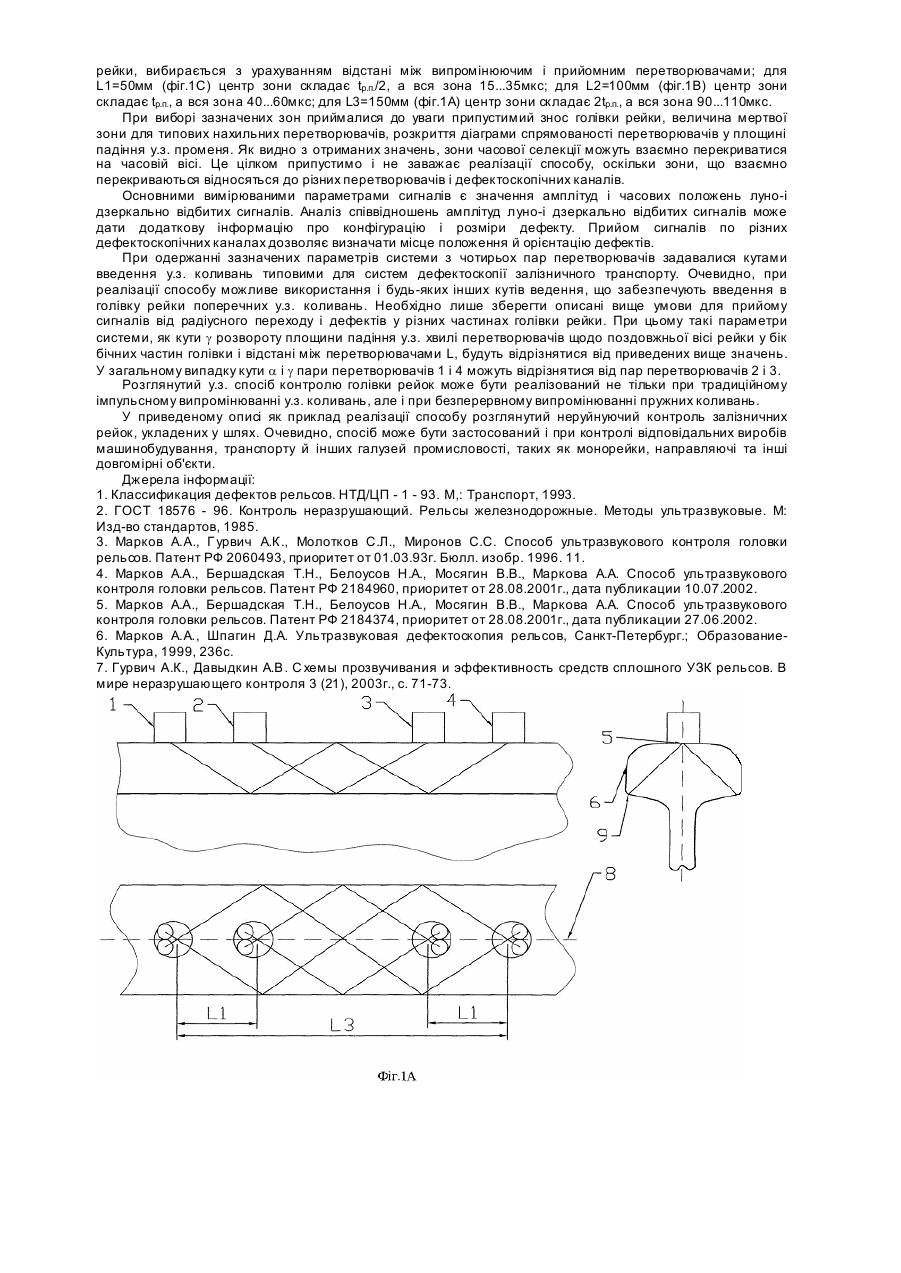
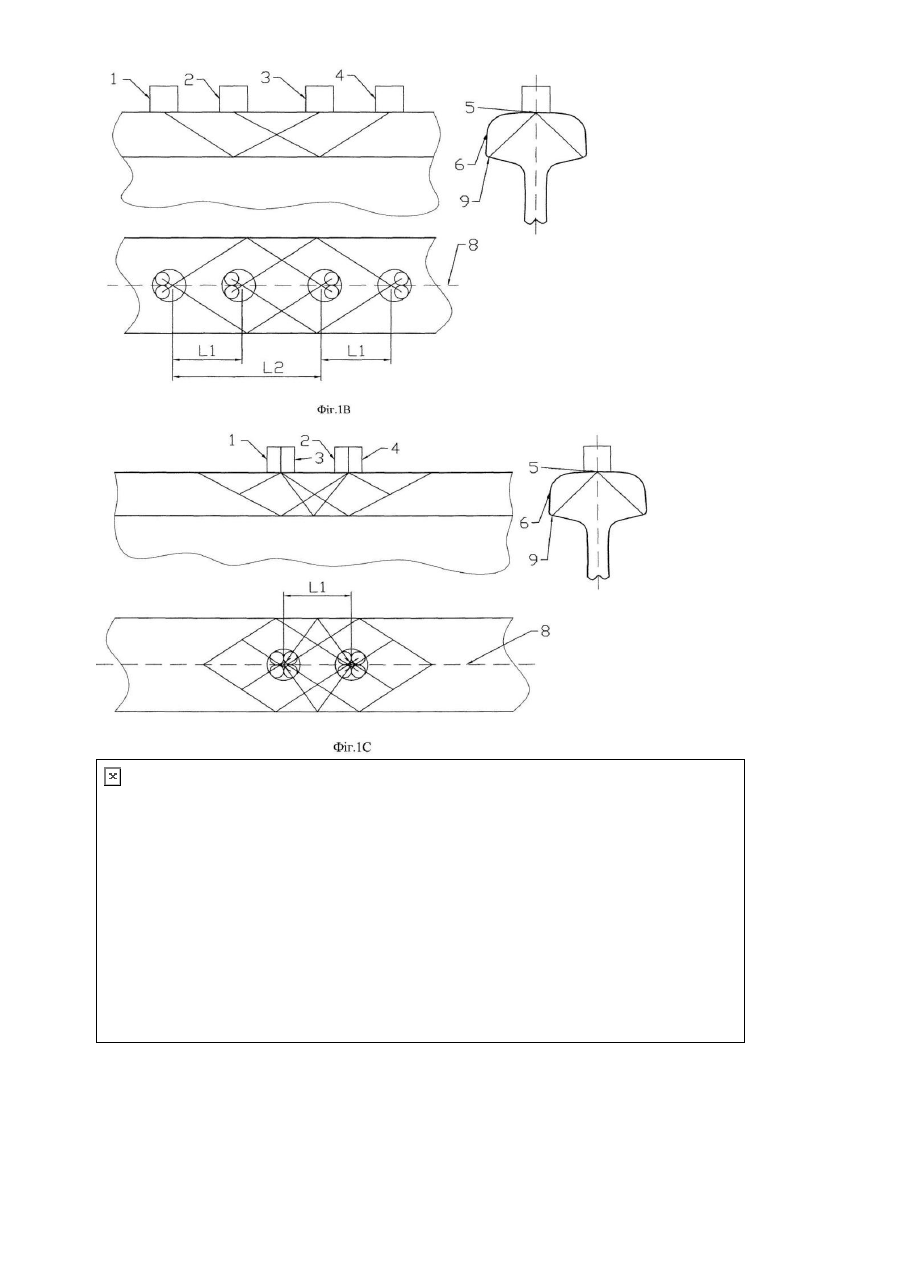
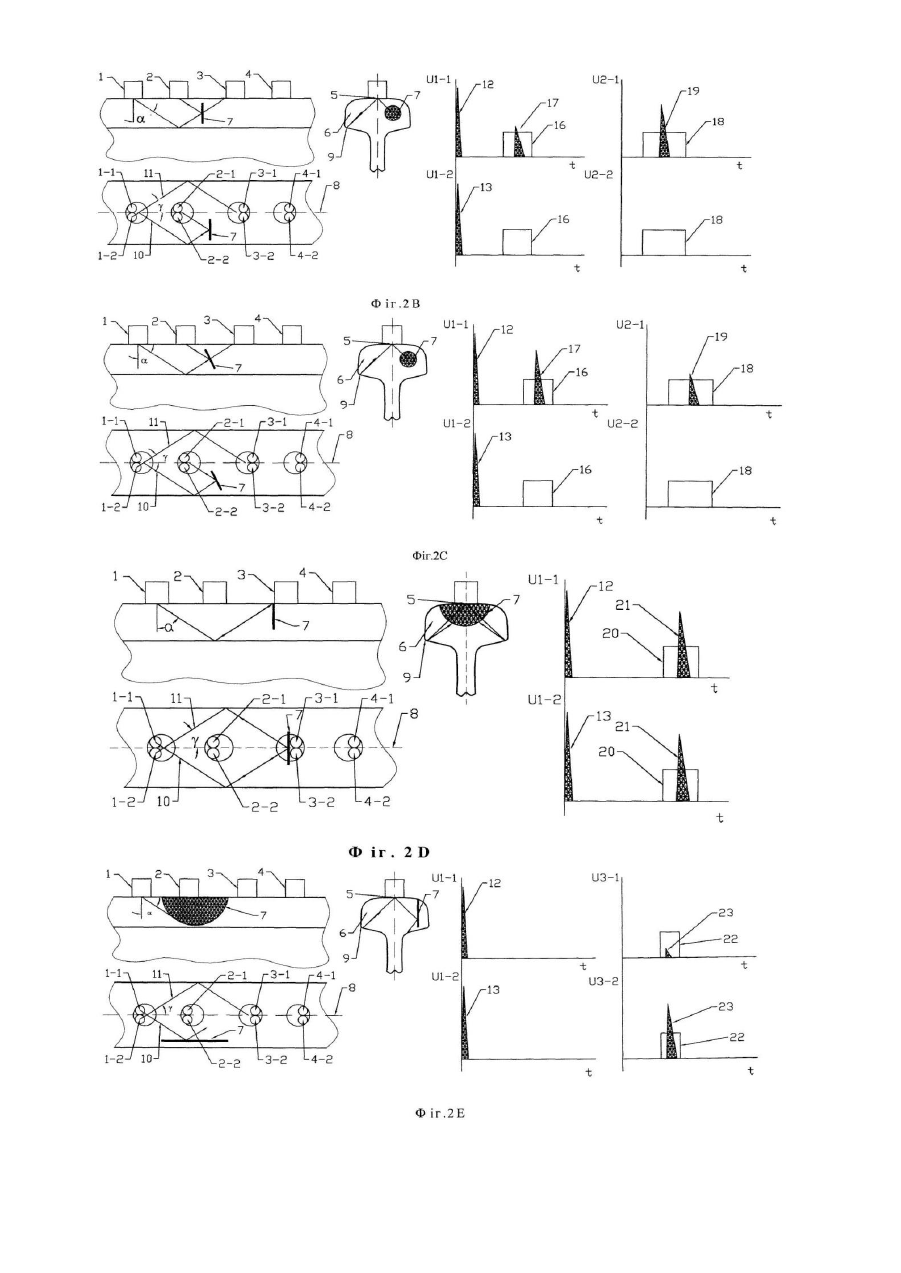
Передбачуваний винахід відноситься до неруйнуючого контролю матеріалів, і може бути використаний при ультразвуковій (у.з.) дефектоскопії залізничних рейок та інших довгомірних виробів. Внаслідок особливостей динамічного впливу коліс рухомого складу на залізничні рейки, голівка рейки зазнає максимальних навантажень. Тому саме в головці рейки найчастіше виникає велика кількість різноманітних поздовжніх і поперечних тріщин. Відомий спосіб ультразвукового контролю голівки рейок ((МПК7 G01N29/04, В61К9/10, патент №2184960, опублікований 10.07.2002), що полягає в тому, що на поверхню кочення голівки рейки симетрично до його поздовжньої осі встановлюють пари нахильних електроакустичних перетворювачів, розвернених під однаковими гострими кутами відносно поздовжньої вісі рейки, кути введення у.з. коливань у метал рейки і кути розвороту перетворювачів вибирають з умови перетину вісей у.з променів, перевідбитих від зон радіусного переходу бічної та нижньої граней голівки рейки, на поздовжній вісі поверхні кочення. Перетворювачі пересувають вздовж поздовжньої вісі рейки, випромінюють і приймають у.з. коливання в трьох часових зонах. Перша часова зона призначена для прийому луно-сигналів від дефектів при прозвучуванні їх прямим у.з. променем, друга зона - для прийому луно-сигналів при прозвучуванні дефектів одноразово відбитим від радіусного переходу бічної і нижньої граней голівки рейки у.з. променем, третя зона - для прийому сигналів, випромінених одним перетворювачем і прийнятих іншим перетворювачем, після перевідображення у.з. променя від кутового відбивача, сформованого поперечною тріщиною і поверхнею кочення чи горизонтальною тріщиною. Про наявність і орієнтацію дефекту судять по спільному аналізу прийнятих перетворювачами сигналів. Т.ч. наведений спосіб дає можливість виявляти поперечні тріщини в центральній частині голівки рейки, що розвиваються як безпосередньо від поверхні кочення, так і від підповерхневих горизонтальних тріщин і відшарувань металу поверхні кочення. Спільний аналіз прийнятих перетворювачами сигналів у трьох часових зонах дозволяє автоматизувати процес виявлення та оцінки орієнтації дефектів. Недоліками описаного способу є: - неможливість виявлення розвинутих поперечних дефектів у бічних частинах голівки рейок із дзеркально-відбиваючою поверхнею через те, що у.з. промінь дзеркально відбивається від поверхні дефекту і не повертається назад на прийомний перетворювач; - неможливість виявлення поздовжніх горизонтальних і вертикальних дефектів у голівці рейки з тої ж причини; - можливість пропуску дефектів через відсутність контролю за акустичним контактом; - можливість пропуску дефектів через відсутність контролю за працездатністю (перетворювача й у.з. каналу вцілому. Найбільш близьким рішенням є "Ультразвуковий Спосіб контролю голівки рейок" (МПК7 G01N29/04, В61К9/10, патент №2184374, опублікований 27.06.2002), відмінною рисою його від наведеного аналога є те, що на поверхні кочення голівки рейки на його поздовжній вісі встановлюють другу пару перетворювачів з ідентичними параметрами, відстань між парами перетворювачів, поряд з кутами введення ультразвукових коливань і кутами розвороту другої пари перетворювачів, вибирають з умови прийому сигналів від дефектів у вигляді поперечних тріщин у бічних частинах голівки рейок. Про наявність і орієнтацію дефекту судять по спільному аналізу прийнятих перетворювачами сигналів. Сигнали від можливих дефектів виділяють у чотирьох часових зонах. Додаткова зона, стосовно наведеного аналога, призначена для прийому другою парою перетворювачів сигналів дзеркально відбитих від де фектів у бічних частинах голівки рейок. Недоліками описаного способу є: - низька надійність і вірогідність контролю, викликана тим, що спосіб не дозволяє виявляти по-різному орієнтовані щодо вертикальної площини дефекти в голівці рейки. Описаний спосіб дозволяє виявляти дефекти орієнтовані вертикально чи відхилені від вертикальної площини у бік напрямку випромінювання. - низька надійність виявлення дефектів у вигляді поздовжніх вертикальних і горизонтальних тріщин, що можуть розвиватися в голівці рейок (код 30В, 30Г, 38 за класифікацією дефектів рейок НТД/ЦП - 1 - 93). - відсутність контролю акустичного контакту, що в свою чергу веде до можливого пропуску дефектів, особливо при наявності на поверхні кочення рейок різних забруднень, при потраплянні піщин, при високих швидкостях переміщення і т. п. В свою чергу, використання двох пар перетворювачів, розташованих на відстані одне від одного, веде до збільшення довжини пошукової лижі, що призводить до збільшення чутливості до стану поверхні кочення. Метою запропонованого винаходу є підвищення надійності і вірогідності у.з. контролю голівки рейки за рахунок усунення зазначених недоліків. Зазначена мета досягається тим, що на поверхню кочення голівки рейки разом з першою і другою парою перетворювачів встановлюють третю і че тверту пари з ідентичними параметрами, розвернуті в протилежному, щодо відповідних пар, напрямку вздовж поздовжньої вісі рейки. Кути введення ультразвукових коливань у метал рейки і кути розвороту першої і третьої пари перетворювачів вибирають з умови перетинання вісей ультразвукових променів, перевідбитих від зон радіусного переходу бічної і нижньої граней голівки рейки, на поздовжній вісі поверхні кочення. Відстань між першою і другою парою, а також третьою і четвертою парою перетворювачів, поряд з кутами введення ультразвукових коливань і кутами розвороту другої і четвертої пари, вибирають з умови прийому сигналів від дефектів у вигляді поперечних тріщин у бічних частинах голівки рейок. Відстань між встановленою першою і другою парою перетворювачів і встановлюваною третьою і четвертою парою вибирають з умови прийому сигналів, перевідбитих від зон радіусного переходу бічної і нижньої граней голівки рейки чи від поздовжніх дефектів, відповідними парами встановлених і встановлюваних перетворювачів. Про наявність і орієнтацію дефектів судять по спільному аналізу прийнятих перетворювачами сигналів. Систему з чотирьох пар перетворювачів переміщують вздовж поздовжньої вісі рейки, випромінюють і приймають у.з. коливання в п'ятьох часових зонах. Перша зона призначена для прийому луно-сигналів від дефектів при прозвучуванні їх прямим ультразвуковим променем, друга зона - для прийому луно-сигналів від дефектів у бічній грані голівки рейок при прозвучуванні їх одноразово відбитим від радіусного переходу бічної і нижньої граней голівки рейки ультразвуковим променем, третя зона - для прийому дзеркально відбитих сигналів від дефектів у бічних частинах голівки рейок, четверта зона - для прийому дзеркально відбитих сигналів від кутового відбивача, утвореного поперечною тріщиною і поверхнею кочення чи горизонтальною тріщиною, п'ята зона - для прийому сигналів, перевідбитих від зон радіусного переходу бічної і нижньої граней голівки рейки, за рівнем яких судять так само про якість акустичного контакту, чи від подовжніх дефектів Про розташування тріщини в голівці рейки і її орієнтації судять по спільному аналізу прийнятих сигналів. Відмінною рисою способу, що заявляється, від обраного прототипу є: 1. Введення додаткової третьої і четвертої пари перетворювачів, розвернути х у протилежному, щодо першої і другої пари, напрямку вздовж рейки. Це забезпечує надійне виявлення в центральній і бічній частинах голівки рейок по-різному орієнтованих щодо вертикальної площини поперечних дефектів, в т. ч. і з дзеркальною відбиваючою поверхнею. 2. Розташування додаткової третьої і четвертої пар перетворювачів щодо першої і другої пари таким чином, щоб разом з останніми забезпечити прийом сигналів перевідбитих від зон радіусного переходу бічної і нижньої граней голівки рейки чи від поздовжніх дефектів. Це дозволяє виявляти поздовжні горизонтальні чи вертикальні дефекти голівки рейки, контролювати якість акустичного контакту за рівнем прийнятого сигналу, суди ти про працездатність перетворювачів і у.з. каналів дефектоскопа вцілому. 3. Виділення луно-сигналів у п'ятьох часових зонах дозволяє, не тільки візуально, але й автоматизованими способами диференціювати сигнали від дефектів у різних частинах голівки рейок, оцінювати орієнтацію дефектів і приблизний розмір. Виходячи з вищевикладеного, можна затверджувати, що даний винахід має новизну, і таким чином, відповідає критерію винахідницького рівня. На фіг.1 показані варіанти реалізації способу, що заявляється, для трьох випадків розташування додаткових третьої і четвертої пар перетворювачів щодо наявних першої і другої пари: А - відстань L3 обрано з умови прийому сигналів дворазово відбитих від зон радіусного переходу бічної і нижньої граней голівки рейки відповідними перетворювачами першої і четвертої пари, а відстань L2 - з умови прийому сигналів одноразово відбитих від зони радіусного переходу бічної і нижньої граней голівки рейки відповідними перетворювачами другої і третьої пари; В - відстань L2 обрано з умови прийому сигналів одноразово відбитих від зони радіусного переходу бічної і нижньої граней голівки рейки відповідними перетворювачами першої - третьої пари і другої четвертої пари, а відстань L1 - з умови прийому сигналів одноразово відбитих від зони радіусного переходу бічної і нижньої граней голівки рейки відповідними перетворювачами другої і третьої пари, при цьому використовуються бічні пелюстки діаграми спрямованості перетворювачів; С - відстань L1 обрана з умови прийому сигналів одноразово відбитих від зони радіусного переходу бічної і нижньої граней голівки рейки відповідними перетворювачами першої і четвертої пари, при цьому використовуються бічні пелюстки діаграми спрямованості перетворювачів. На фіг.2 показано п'ять варіантів виявлення дефектів у голівці рейки і виділення сигналів від них у відповідних часових зонах, для варіанта реалізації способу, що заявляється, зазначеного на фіг.1В: А - у бічній частині при прозвучуванні поперечної тріщини прямим у.з. променем; В - у бічній частині при прозвучуванні поперечної тріщини одноразово відбитим у.з. променем; С - у бічній частині при дзеркальному відображенні у.з. променя від поверхні поперечної тріщини; D - у центральній частині при дзеркальному відображенні у.з. променя від поверхні поперечної тріщини; Ε - у центральній і (чи) бічній частині при зникненні сигналу через поздовжню чи поперечну тріщин у. На наведених фігура х введені наступні позначення: 1, 1-1, 1-2 - перша пара нахильних перетворювачів; 2, 2-1, 2-2 - друга пара нахильних перетворювачів; 3, 3-1, 3-2 - третя пара нахильних перетворювачів; 4, 4-1, 4-2 - четверта пара нахильних перетворювачів; 5 - поверхня кочення; 6 - голівка рейки; 7 - дефект у голівці рейки; 8 - поздовжня вісь рейки; 9 - зона радіусного переходу (лі ва і права); 10, 11 - у.з. промені, випромінювані відповідно перетворювачами 1-1 і 1-2; 12, 13 - зондуючі імпульси; 14, 16, 18, 20, 22 - часові зони для виділення сигналів; 15, 17, 19, 21, 23 - сигнали, прийняті перетворювачами; U1-1, U1-2 - амплітуда сигналів прийнятих першою парою перетворювачів; U2-1, U2-2 - амплітуда сигналів прийнятих другою парою перетворювачів; U3-., U3-2 - амплітуда сигналів прийнятих третьою парою перетворювачів; a - кут введення ультразвукових коливань у метал рейки, що відлічується від нормалі до поверхні введення; g - кут розвороту перетворювачів щодо поздовжньої вісі рейки в сторони бічних граней голівки рейки. Ультразвуковий спосіб контролю голівки рейок реалізується таким чином: Чотири пари ідентичних нахильних електроакустичних перетворювачів 1-4 (фіг.1) встановлюють на поверхню кочення 5 голівки рейки 6 і переміщують систему перетворювачів 1-4 вздовж поздовжньої вісі 8 рейки, забезпечуючи акустичний контакт між перетворювачами і поверхнею 5 рейки (шляхом подачі контактної рідини, наприклад води). За допомогою першої пари перетворювачів випромінюють у голівку рейки поперечні у.з. коливання, максимальна енергія яких поширюється по траєкторії у вигляді проміня 10 для перетворювача 1-1 та проміня 11 для перетворювача 1-2 (фіг.2). Перетворювачем 1-1, що працює в сумісному режимі випромінювання і прийому у.з. коливань, за тою ж траєкторією 10, здійснюється прийом луно-сигналів відбитих від дефектів 7, в основному, у вигляді поперечних тріщин, що розвиваються в бічній частині голівки рейки. Виявлення поперечних тріщин може бути реалізовано прямим променем, що поширюється від точки вводу до протилежної поверхні (фіг.2 А), чи одноразово відбитим, тобто перевідбитим від зони радіусного переходу 9 бічної і нижньої граней голівки рейки (фіг.2В). При відсутності де фектів у бічній частині голівки рейок у.з. коливання випромінюються перетворювачем 1-2 по траєкторії 11 і не повертаються назад. Аналогічно здійснюється виявлення дефектів перетворювачем 1-2 і поширюються у.з. коливання випроменені перетворювачем 1-1 при відсутності дефектів. Для одночасного контролю двох бічних частин голівки рейки пара перетворювачів 1 має ідентичні параметри: кут a введення і прийому у.з. коливань; кут g розвороту перетворювачів щодо поздовжньої вісі у бік відповідної бічної грані. Парою перетворювачів 1 у сумісному режимі роботи можливе виявлення дефектів у голівці рейки багаторазово відбитими променями (не зазначено). Аналогічним чином можливе виявлення дефектів парою перетворювачів 2. Виявлення дефектів 7, що мають протилежну орієнтацію здійснюється аналогічним чином парою перетворювачів 3 чи 4. При наявності в бічній грані голівки рейки дефекту 7 у вигляді поперечної тріщини з дзеркальною для акустичних хвиль поверхнею, прийом луно-сигналів перетворювачем 1-1 буде ускладнений, тому що у.з. промені, падаючи на поверхню такої тріщини під визначеним кутом, будуть перевідбиватися від її за дзеркальним законом, назад буде повертатися лише незначна частина енергії сигналу, дифузно відбита від країв тріщини. Прийом сигналу, випроміненого перетворювачем 1-1 за променем 10 і дзеркально відбитого від дефекту 7, здійснюється ідентичним перетворювачем 2-1, розташованим на відповідній відстані L вздовж поздовжньої вісі рейки, щодо перетворювача 1-1 (фіг.2С). Аналогічним чином можливе виявлення дефекту 7 у.з. сигналом що розповсюджується за тою ж траєкторією, але випроміненим перетворювачем 21 і прийнятим перетворювачем 1-1. При відсутності де фекту 7 сигнал випромінюється перетворювачем 1-2 і поширюється за променем 11, а дзеркально відбитий сигнал на прийомний перетворювач 2-2 не надходить. Аналогічним чином відбувається виявлення дефектів 7 із дзеркальною поверхнею парою перетворювачів 12 і 2-2, 3-1 і 4-1, 3-2 і 4-2, при цьому немає значення, який перетворювач є випромінюючим, а який прийомним. При наявності в центральній частині голівки рейки дефекту 7, у вигляді поперечної тріщини під поверхнею кочення чи горизонтальним розшаруванням, прийом луно-сигналів здійснюється парою перетворювачів 1 (фіг.2D). При цьому, у.з. Коливання випроменені перетворювачем 1-1, поширюються за променем 10, перевідбиваються від зони радіусного переходу 9, відбиваються від кутового відбивача, утвореного поверхнею кочення 5 (чи горизонтальним розшаруванням) і поперечною тріщиною, і, за променем 11 приймаються перетворювачем 1-2, вдруге перевідбившись від зони радіусного переходу 9 іншої бічної частини голівки рейки. Аналогічно відбувається виявлення дефекту 7, коли випромінюючим є перетворювач 1-2, а прийомним 1-1. Аналогічним чином можливе виявлення дефектів парою перетворювачів 2. Виявлення дефектів 7, що мають протилежну орієнтацію щодо вертикальної вісі, здійснюється аналогічним чином парою перетворювачів 3 чи 4. При відсутності дефектів у голівці рейки і задовільному акустичному контакті, здійснюється прийом у.з. коливань, випромінених перетворювачем 1-2, що поширюються за променем 11, що перевідбивається від зони радіусного переходу 9 і перетворювачів, що попадають на додаткову ідентичну пару, 3-2, що встановлена на відстані L2, щодо перетворювача 1-2 (фіг.2Е). У випадку влучення в зону поширення променів дефекту у вигляді поздовжньої тріщини 7 чи поперечної (не зазначено), прийом у.з. коливань, випромінених перетворювачем 1-1, перетворювачем 3-2 ускладнюється, що призводить до ослаблення чи повного зникнення амплітуди прийнятого сигналу (фіг.2Е). Прийом у.з. Коливань ускладнюється так само при порушенні акустичного контакту, що дозволяє здійснювати його контроль. За цими сигналами можливий постійний контроль працездатності перетворювачів і каналів дефектоскопа вцілому. Аналогічно, можливий прийом у.з. коливань випромінених парою перетворювачів 3-1 і 3-2 і прийнятих парою перетворювачів 1-1 і 1-2 відповідно. Аналогічним чином можливе виявлення дефектів парою перетворювачів 2-1 і 4-1, 2-2 і 4-2, при цьому немає значення, який перетворювач є випромінюючим, а який прийомним. Різні варіанти реалізації способу, що заявляється, утворюються за рахунок вибору різних відстаней між випромінюючими і прийомними перетворювачами LI, L2 чи L3, що обумовлено одноразовим (фіг.1В, 3) чи дворазовим (фіг.1А) перевідбиттям у.з. променів від радіусного переходу 9. Можливі й інші відстані між цими перетворювачами при використанні багаторазових перевідображень. Виявлення поздовжніх дефектів при реалізації способу зазначеного на фігурі 1С трохи відрізняється від описаного вище за рахунок використання не центральних, а бічних променів діаграми спрямованості перетворювачів (зазначені пунктирною лінією). У цьому випадку можливий прийом сигналів відбитих від поздовжніх тріщин і, сигналів що поширюються за центральним променем діаграми спрямованості, при цьому амплітуда цих сигналів буде набагато перевищувати амплітуду сигналів, що розповсюджуються за бічними променями на бездефектних ділянках. Звичайно, кожна пара перетворювачів може встановлюватися окремо чи у загальному корпусі (фіг.1 А, У). Але це призводить до збільшення кількості корпусів перетворювачів і загальної довжини пошукової системи. Реалізація такої системи може бути використана на швидкісних засобах дефектоскопії рейок, де вимоги до пошукової системи не критичні. Однак, для знімних дефектоскопічних візків необхідне використання мінімальної кількості перетворювачів на одну нитку (від 4 до6), що обумовлено невеликою довжиною пошукової системи. Тому, на фіг.1С показаний варіант реалізації способу, що заявляється, у якому дві пари перетворювачів конструктивно об'єднані в один корпус, що дозволило скоротити кількість корпусів перетворювачів до двох. При практичній реалізації способу можливі різні варіанти підключення пар електроакустичних перетворювачів 1-4 до у.з. багатоканальному дефектоскопу, що дозволяє реалізувати різні способи контролю голівки рейок, наведені на фігурі 2, при сумісному чи роздільному включенні перетворювачів, причому немає значення який перетворювач є випромінюючим, а який прийомним. Найбільш оптимальним, з погляду швидкості проведення контролю, є використання двотактової схеми включення, при якій, наприклад, для фіг.1С пара перетворювачів 1 є випромінюючою і працює в сумісному режимі, а пари перетворювачів 2 і 4 є прийомними, при цьому відбувається контроль усього перерізу голівки рейки в одному напрямку; у др угому такті пара перетворювачів 4 є випромінюючої і працює в сумісному режимі, а пари перетворювачів 1 і 3 є прийомними, при цьому відбувається контроль усього перерізу голівки рейки в протилежному напрямку. Можлива реалізація й інших схем включення перетворювачів, наприклад чотирьохтактна схема, що аналогічна двотактній, але в кожному такті випромінює не пара перетворювачів, а один з них, відповідні перетворювачі інших пар є прийомними. Це дозволяє зменшити кількість фізичних каналів дефектоскопа за рахунок роботи перетворювачів не паралельно, а послідовно з використанням комутатора, а кількість інформаційних каналів залишається тою ж. Як перетворювачі 1-4 звичайно вибирають п'єзоелектричні перетворювачі у.з. коливань (для вітчизняних залізниць це п'єзоелементи ЦТС-19 діаметром 12мм). У загальному випадку в якості перетворювачів можливе застосування інших відомих типів випромінювачів - приймачів акустичних коливань. Найбільш істотним у способі, що заявляється, є правильний вибір параметрів системи перетворювачів 1-4: кутів введення у.з. коливань a 1 - a, кутів розвороту g1 - g4 щодо поздовжньої вісі рейки, відстаней між парами перетворювачів L1 - L3. Кути введення і кути розвороту задаються типовими для систем дефектоскопії залізничного транспорту і звичайно складають a=58°, g=36°. Для інших кутів a, кут розвороту g визначається з виразу: (1) sing=B/(2Htga) де В - ширина голівки рейки в зоні радіусного переходу бічної і нижньої граней; Η - висота голівки рейки (відстань від поверхні кочення до зони радіусного переходу). Для отримання сигналів перевідбитих від зон радіусного переходу чи дзеркально відбитих від дефектів у бічних частинах голівки рейок, доцільно кути введення і розвороту всіх пар перетворювачів 1-4 вибрати ідентичними, тобто a 1-4=58°, g1-4=36°. Відстані між перетворювачами вибирають з умови траєкторії поширення у.з. променів: (2) L=L1=B/(2tgg); L2=2L1; L3=3L1 Для рейки типу Р65 (Η=39мм, В=75мм) при типових кута х введення і розвороту перетворювачів, одержуємо L=L1=50мм; L2=100мм; L3=150мм. З урахуванням зручності реалізації розглянутого способу контролю в схемах прозвучування знімних дефектоскопічних візків за допомогою перетворювачів з типовими характеристиками (частота у.з. коливань 2,5МГЦ, кут розкриття у.з. променя 8-12°), прийняті наступні параметри системи (фіг.1С): - відстань між перетворювачами L1=50±2мм; - кути введення у.з. коливань a=58±2 (кути призм перетворювачів з органічного скла b=45°); - кути розвороту перетворювачів щодо поздовжньої вісі рейки g=36°±2°. Отримані результати підтверджені під час контролю рейок за допомогою рейкового дефектоскопа УДС2-73. Спосіб, що заявляється, реалізований як показано на фіг.1С, дозволяє впевнено виявляти реальні поперечні тріщини в бічних і центральних частинах голівки рейки різної орієнтації. Запропонована схема прозвучування виявилася ефективною при виявленні не тільки поперечних, але і поздовжніх тріщин, що розвиваються в голівці рейки, але ще не виходять в область проекції шийки (код 30Г, 30В, 38 [1]). Такі дефекти не виявляються відомими схемами прозвучування реалізованими в різних засобах суцільного контролю рейок. Завдяки розкриттю діаграми спрямованості (8-12°) і введенню у.з. коливань по і проти ходу дефектоскопічного візка у бік робочої і неробочої грані голівки рейки, зазначена система перетворювачів дозволяє контролювати практично весь переріз голівки, забезпечуючи виявлення всіх дефектів другої і третьої групи [1] незалежно від їхнього розташування й орієнтації. Власне кажучи, запропонований спосіб дозволяє реалізувати багатофункціональну пошукову систему, що забезпечує надійне виявлення всіх по-різному орієнтованих поперечних тріщин у центральній і бічній частинах голівки рейок. На відміну від відомих способів, забезпечує виявлення поздовжніх і поперечних тріщин, у т. ч. тріщин, що не ви ходять у проекцію шийки, за рахунок використання додаткових пар перетворювачів, що так само дозволяє проводити оцінку якості акустичного контакту і працездатності перетворювачів і каналів дефектоскопа. Конструктивне розташування двох пар перетворювачів в одному корпусі дозволяє реалізувати спосіб контролю голівки рейки, що заявляється, не тільки у швидкісних засобах дефектоскопії, але й у знімних дефектоскопічних візках. Для спрощення процедури аналізу і наступної автоматизації процесу у.з. контролю рейок доцільно всю можливу зону приходу сигналів розділити на окремі часові зони. Виділення прийнятих сигналів у п'ятьох часових зонах здійснюється за рахунок їхньої часової селекції. Для цього розраховують час поширення у.з. коливань до зони 9 радіусного переходу бічної і нижньої граней голівки рейки і назад за виразом: (3) tр.п.=2tп+2H/(ctcosa) де tп - час поширення у.з. коливань у призмі нахильного перетворювача; ct - швидкість поперечних у.з. коливань у матеріалі голівки рейки (для сталі ct=3260м/с). Для контролю голівки рейки типу Р65 (сt=3260м/с, Η=39мм, a=58°) і для нахильних перетворювачів, що використовуються у практиці контролю рейок (2tп=5мкс), визначають за (3) значення tp.п.=50мкс, далі можна вибрати параметри всіх часови х зон селекції: Зона 1 - для селекції луно-сигналів 15 від дефектів 7 у бічній частині голівки рейки, прийнятих при прозвучуванні їх прямим у.з. променем, розташовується до tр.п. і складає 10...46мкс (фіг.2 А); Зона 2 - для селекції луно-сигналів 17 від дефектів 7 у бічній частині голівки рейки, прийнятих при прозвучуванні їх одноразово відбитим у.з. променем, розташовується після tp.п. і складає 52...83мкс (фіг.2В); Зона 3 - для селекції дзеркально відбитих сигналів 19 від поперечних тріщин, що залягають у бічних частинах голівки, 7, вибирається з центром рівним tp.п. і тривалістю що враховує прийом сигналів бічними променями діаграми спрямованості перетворювачів, складає 23...69мкс (фіг. 2С); Зона 4 - для селекції сигналів 21 відбитих від поперечних тріщин 7 у центральній частині голівки рейки, вибирається з центром рівним 2tp.п. і з урахуванням розкриття діаграми спрямованості перетворювача складає 84...114мкс (фіг.2D); Зона 5 - для селекції сигналів 23 відбитих від зони 9 радіусного переходу бічної і нижньої граней голівки рейки, вибирається з урахуванням відстані між випромінюючим і прийомним перетворювачами; для L1=50мм (фіг.1С) центр зони складає tp.п./2, а вся зона 15...35мкс; для L2=100мм (фіг.1В) центр зони складає tp.п., а вся зона 40...60мкс; для L3=150мм (фіг.1А) центр зони складає 2tp.п., а вся зона 90...110мкс. При виборі зазначених зон приймалися до уваги припустимий знос голівки рейки, величина мертвої зони для типових нахильних перетворювачів, розкриття діаграми спрямованості перетворювачів у площині падіння у.з. променя. Як видно з отриманих значень, зони часової селекції можуть взаємно перекриватися на часовій вісі. Це цілком припустимо і не заважає реалізації способу, оскільки зони, що взаємно перекриваються відносяться до різних перетворювачів і дефектоскопічних каналів. Основними вимірюваними параметрами сигналів є значення амплітуд і часових положень луно-і дзеркально відбитих сигналів. Аналіз співвідношень амплітуд луно-і дзеркально відбитих сигналів може дати додаткову інформацію про конфігурацію і розміри дефекту. Прийом сигналів по різних дефектоскопічних каналах дозволяє визначати місце положення й орієнтацію дефектів. При одержанні зазначених параметрів системи з чотирьох пар перетворювачів задавалися кутами введення у.з. коливань типовими для систем дефектоскопії залізничного транспорту. Очевидно, при реалізації способу можливе використання і будь-яких інших кутів ведення, що забезпечують введення в голівку рейки поперечних у.з. коливань. Необхідно лише зберегти описані вище умови для прийому сигналів від радіусного переходу і дефектів у різних частинах голівки рейки. При цьому такі параметри системи, як кути g розвороту площини падіння у.з. хвилі перетворювачів щодо поздовжньої вісі рейки у бік бічних частин голівки і відстані між перетворювачами L, будуть відрізнятися від приведених вище значень. У загальному випадку кути a і g пари перетворювачів 1 і 4 можуть відрізнятися від пар перетворювачів 2 і 3. Розглянутий у.з. спосіб контролю голівки рейок може бути реалізований не тільки при традиційному імпульсному випромінюванні у.з. коливань, але і при безперервному випромінюванні пружних коливань. У приведеному описі як приклад реалізації способу розглянутий неруйнуючий контроль залізничних рейок, укладених у шлях. Очевидно, спосіб може бути застосований і при контролі відповідальних виробів машинобудування, транспорту й інших галузей промисловості, таких як монорейки, направляючі та інші довгомірні об'єкти. Джерела інформації: 1. Классификация дефектов рельсов. НТД/ЦП - 1 - 93. Μ,: Транспорт, 1993. 2. ГОСТ 18576 - 96. Контроль неразрушающий. Рельсы железнодорожные. Методы ультразвуковые. М: Изд-во стандартов, 1985. 3. Марков А.А., Г урвич А.К., Молотков С.Л., Миронов С.С. Способ ультразвукового контроля головки рельсов. Патент РФ 2060493, приоритет от 01.03.93г. Бюлл. изобр. 1996. 11. 4. Марков Α.Α., Бершадская Т.Н., Белоусов Н.А., Мосягин В.В., Маркова А.А. Способ ультразвукового контроля головки рельсов. Патент РФ 2184960, приоритет от 28.08.2001г., дата публикации 10.07.2002. 5. Марков Α.Α., Бершадская Т.Н., Белоусов Н.А., Мосягин В.В., Маркова А.А. Способ ультразвукового контроля головки рельсов. Патент РФ 2184374, приоритет от 28.08.2001г., дата публикации 27.06.2002. 6. Марков А.А., Шпагин Д.А. Ультразвуковая дефектоскопия рельсов, Санкт-Петербург.; ОбразованиеКультура, 1999, 236с. 7. Гурвич А.К., Давыдкин А.В. С хемы прозвучивания и эффективность средств сплошного УЗК рельсов. В мире неразрушающего контроля 3 (21), 2003г., с. 71-73.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of ultrasonic testing of a rail head
Назва патенту російськоюСпособ ультразвукового контроля головки рельса
МПК / Мітки
МПК: G01N 29/04
Мітки: головки, рейки, ультразвукового, контролю, спосіб
Код посилання
<a href="https://ua.patents.su/7-67872-sposib-ultrazvukovogo-kontrolyu-golovki-rejjki.html" target="_blank" rel="follow" title="База патентів України">Спосіб ультразвукового контролю головки рейки</a>
Спосіб ультразвукового контролю труб

Номер патенту: 32155
Опубліковано: 15.12.2000
Автори: Кожевніков Володимир Іванович, Гуляєв Геннадій Іванович, Анікєєв Яків Фокич
МПК: G01N 29/34, G01N 29/04
Мітки: контролю, труб, ультразвукового, спосіб
Текст:
...поверхні труби з одночасним підвищенням достовірності контролю величини зерна метала. Поставлена задача вирішується тим, шо в способі ультразвукового контролю труб, відповідно якому збуджують ультразвукові коливання під кутом до поверхні труби у вигляді нормальних хвиль асиметричної нульо вої моди за критичним кутом падіння Релея, довжина яких перевищує товщину стінки труби, що контролюється, приймають від зерен метала та дефектів...
Спосіб ультразвукового контролю холоднодеформованих труб

Номер патенту: 24821
Опубліковано: 06.10.1998
Автори: Сергєєв Віктор Володимирович, Анікеєв Яків Фокич, Гуляєв Геннадій Іванович
МПК: G01N 29/04, G01N 29/48
Мітки: ультразвукового, контролю, спосіб, труб, холоднодеформованих
Формула / Реферат:
Спосіб ультразвукового контролю холоднодеформованих труб, відповідно котрому проводять введення ультразвукових коливань під кутом до поверхні труби та сприймають віддзеркалені сигнали від уздовжних дефектів, визначаючи їх величину шляхом порівняння амплітуд цих сигналів з амплітудами позначок на еталонах, який відрізняється тим, що величину кута вводу ультразвукових коливань визначають з умови дотику зламаного в стінки труби променя до її...
Спосіб контролю положення рейки паливного насоса двз і пристрій для його здійснення
Номер патенту: 23918
Опубліковано: 31.08.1998
Автори: Білогуб Олександр Віталійович, Сокорчук Ігор Петрович
МПК: F02D 41/00
Мітки: контролю, здійснення, рейки, спосіб, пристрій, двз, паливного, положення, насоса
Формула / Реферат:
1. Спосіб контролю положення рейки паливного насоса ДВЗ, при якому положення рейки постійно вимірюють за кількістю кроків зв'язаного з нею дискретного електропривода від нульового положення, який відрізняється тим, що в процесі пуску і роботи ДВЗ незалежно відмічають положення рейки, яке відповідає двом характерним режимам, наприклад, режиму нульової подачі і режиму початку димлення, контролюють збіг початку відліку з нульовою подачею при...
Спосіб алюмотермічного зварювання рейок заливкою проміжного металу з легуванням сталевого відливка в зоні головки рейки

Номер патенту: 28056
Опубліковано: 16.10.2000
Автори: Мульдер Герхардус Йоханнес, Штайнхорст Міхаел
МПК: B23K 23/00
Мітки: головки, зварювання, сталевого, зони, відливка, проміжного, алюмотермічного, заливкою, металу, спосіб, рейок, рейки, легуванням
Текст:
...порядка 2500°С, причем более легкие по своему удельному весу шлаки (АЬОз) образуют плавающий слой на поверхности железа В основные компоненты термитной смеси - оксид железа и алюминий малой зернистости - вводят добавки зернистых частиц стали для замедления реакции, а также, в зависимости от особенностей свариваемого материала, добавки компонентов сталеобразования, таких как С, Мп, Сг, Vn Mo . ю о 00 см о» 28056 Образующаяся при сгорании...
Спосіб алюмотермічного зварювання рейок заливанням проміжного металу з легуванням стального виливка в зоні головки рейки

Номер патенту: 28055
Опубліковано: 16.10.2000
Автори: Макрей Дональд, Кустер Франк, Мульдер Герхардус Йоханнес, Штайнхорст Міхаел
МПК: B23K 23/00
Мітки: зварювання, стального, спосіб, заливанням, рейки, рейок, металу, проміжного, легуванням, зони, виливка, головки, алюмотермічного
Текст:
...слой на поверхности железа. В основные компоненты термитной смеси оксид железа и алюминий малой зернистости ~ вводят добавки зернистых частиц стали для замедления реакции, а также, в зависимости от особенностей свариваемого материала, добавки компонентов сталеобразования, таких как С, Мп, Сг, V и Мо Образующаяся при сгорании термитной реакционной смеси расплавленная сталь необходимо О т ю о 00 оГ 28055 го качества пригодна для...
Попередній патент: Спосіб отримання олії з рослинної сировини
Наступний патент: Високоефективний сигаретний фільтр
Випадковий патент: Пристрій для зняття електростатичного заряду