Механізм-гексапод
Номер патенту: 73729
Опубліковано: 10.10.2012
Автори: Струтинський Сергій Васильович, Гуржій Андрій Андрійович
Формула / Реферат
Механізм гексапод, який містить нерухому платформи та рухому платформи із робочим органом, шість механізмів поступального переміщення корпусів та вихідні елементи яких шарнірно з’єднані відповідно з нерухомою та рухомою платформами, а шарніри встановлені на нерухомій платформі виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі, який відрізняється тим, що шарніри, встановлені на рухомій платформі, виконані у вигляді гідростатичних або аеростатичних сферичних підшипників, зазор яких регулюється мехатронною системою, причому шарніри мають сфери, закріплені на вихідних елементах механізмів поступальних переміщень та корпуси, розміщені на рухомій платформі, а в шарнірах виконано кармани, підключені через дроселі та пропорційні гідророзподільники до джерела стисненої рідини, причому зазори між сферою і шарнірами виконані з можливістю уникнення похибки геометрії, кінематики, статичних та динамічних деформацій всіх ланок механізму-гексаподу.
Текст
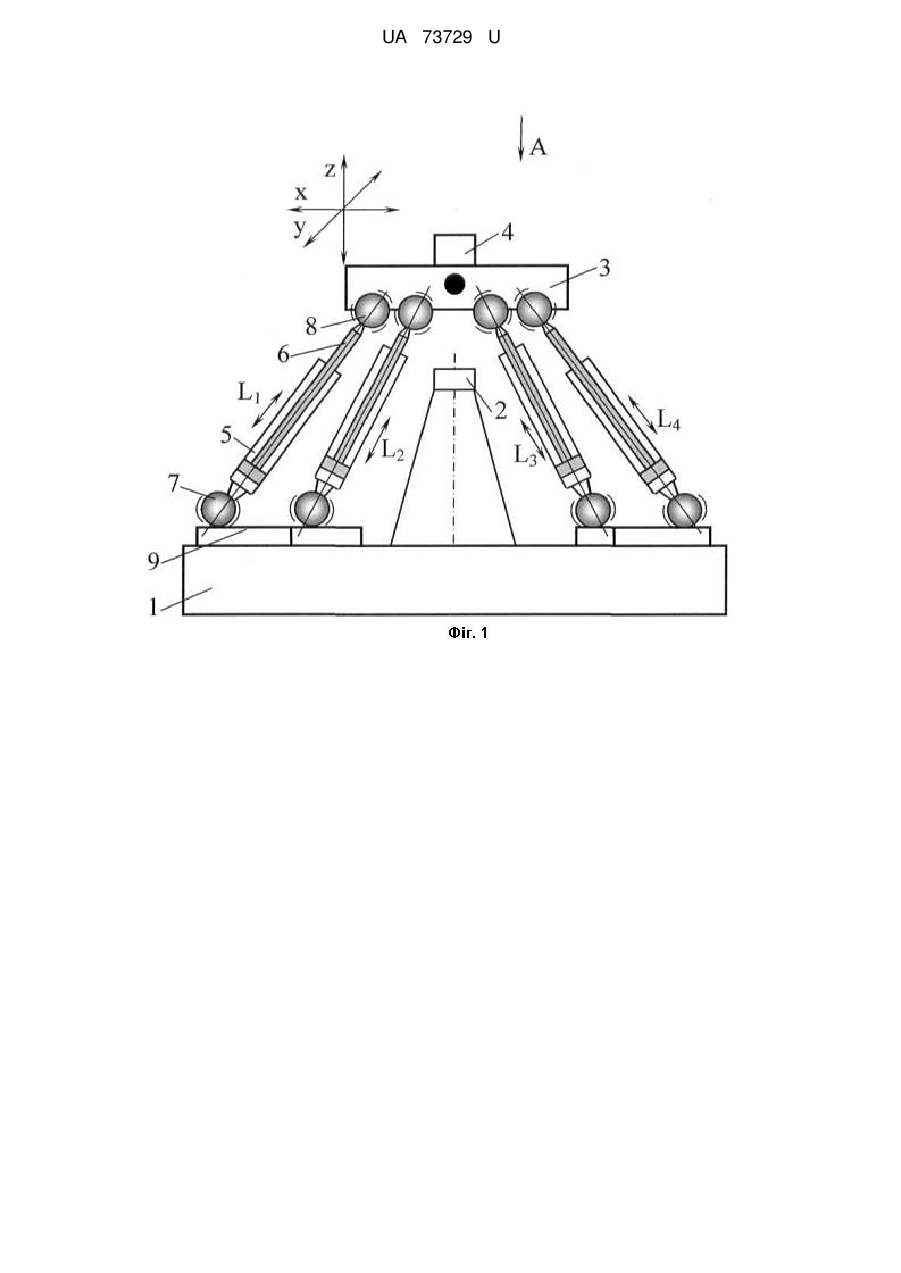
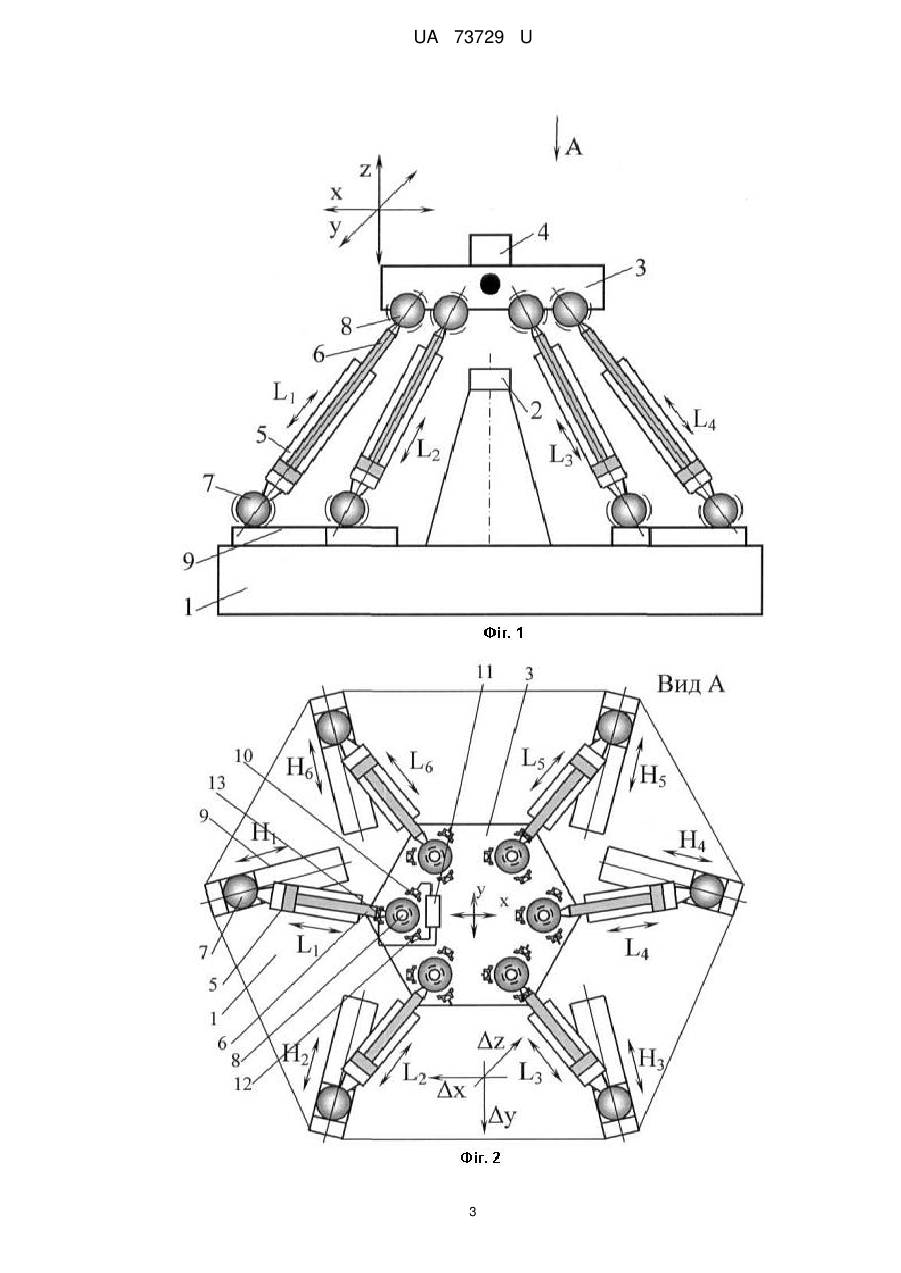
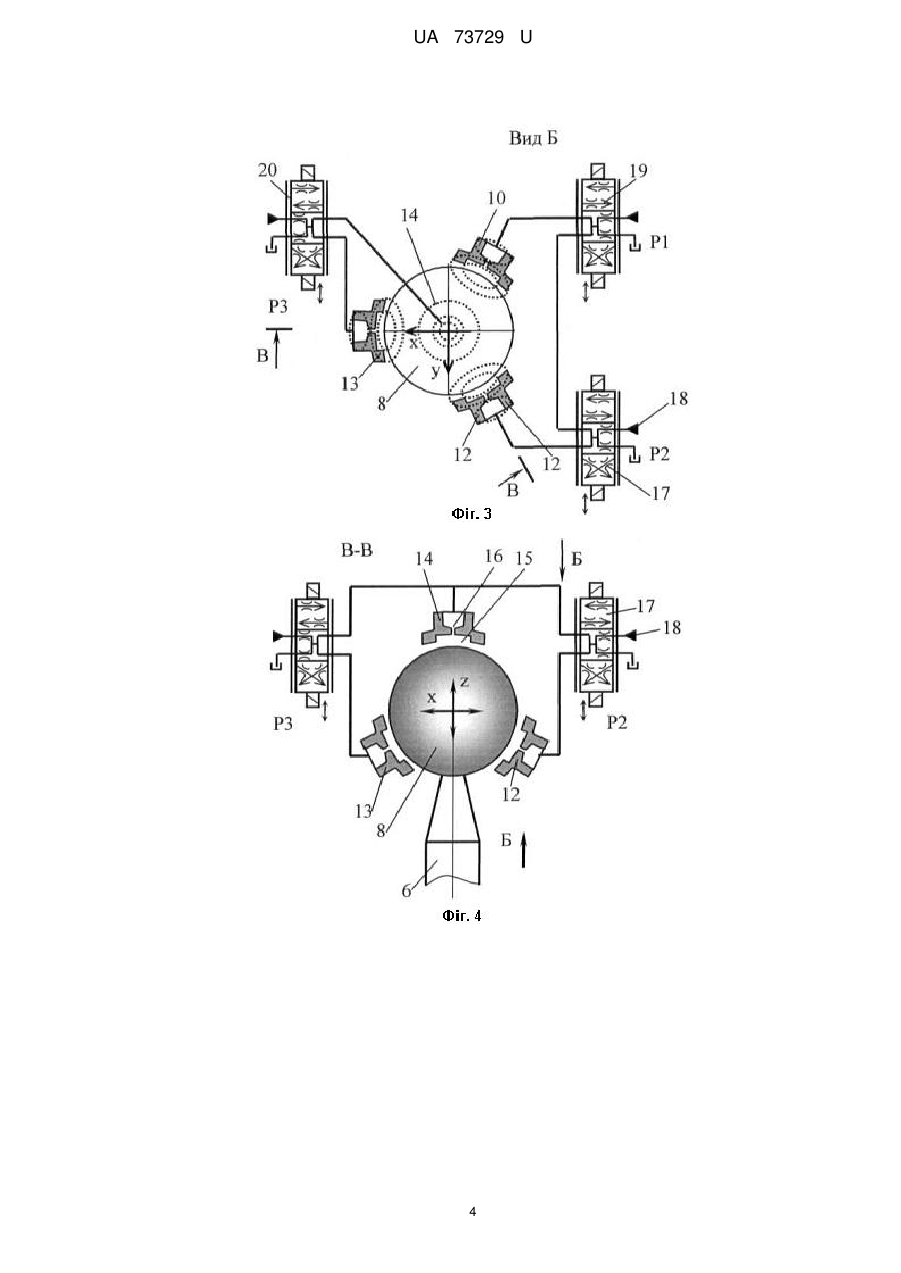
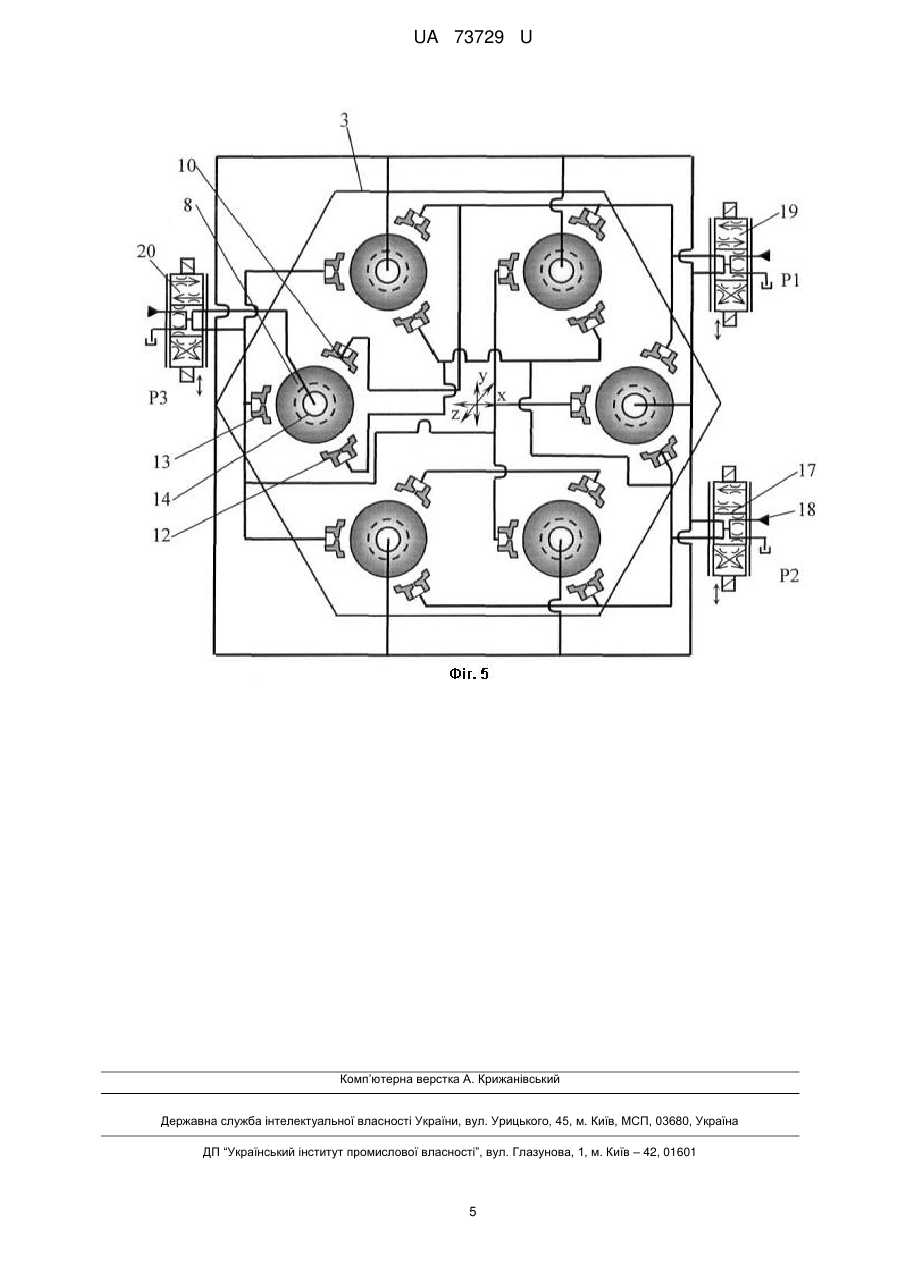
Реферат: UA 73729 U UA 73729 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до загального машинобудування і може бути використана при розробці точного технологічного обладнання на основі механізмів із паралельними кінематичними зв'язками. Відомі механізми [1] із штангами постійної довжини (гексаглайди) та механізми із штангами змінної довжини (гексаподи). Їх недоліками є низька точність і жорсткість та недостатні розміри робочої зони. За прототип прийнято верст-гексапод [2], який складається з нерухомої платформи зі столом, рухомої платформи з робочим органом, шести механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами, при цьому шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі. Недоліком прототипу є низька точність при дії статичних і динамічних навантажень. В основу корисної моделі поставлена задача підвищення точності механізму за рахунок демпфування вібрацій та введення додаткового керування положенням робочого органу, реалізованого в декартовій прямокутній системі координат. Переміщення робочого органа при цьому забезпечує ефективну корекцію похибок, що виникають при переміщенні робочого органа за рахунок похибок встановлення - координат та статичних і динамічних деформацій ланок механізму. Поставлена задача вирішується тим, що в механізмі-гексаподі, який складається із нерухомої та рухомої платформи із робочим органом, шести механізмів поступального переміщення корпуса, та вихідні елементи яких шарнірно з'єднані відповідно з нерухомою та рухомою платформами, а шарніри встановлені на нерухомій платформі виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі, новим є те, що шарніри, встановлені на рухомій платформі, виконані у вигляді гідростатичних або аеростатичних сферичних підшипників, зазор яких регулюється мехатронною системою, при цьому шарніри мають сфери, закріплені на вихідних елементах механізмів поступальних переміщень, та корпуси, розміщені на рухомій платформі, а в корпусах шарнірів виконано кармани, підключені через дроселі та пропорційні гідророзподільники до джерела стисненої рідини, при цьому зазори між сферами і корпусами шарнірів перевищують похибки геометрії, кінематики, статичних та динамічних деформацій всіх ланок механізму-гексаподу. Таким чином запропоноване технічне рішення є новим в порівнянні з відомим і дозволяє підвищити точність механізму шляхом застосування принципово нового способу регулювання положення виконавчого органу. На фіг. 1 наведена конструктивна схема механізму при вигляді спереду, на фіг. 2 - вид зверху механізму (по стрілці А), на фіг. 3 - принципова схема окремого регульованого гідростатичного або аеростатичного сферичного шарніра при вигляді зверху, на фіг. 4 наведено перетин шарніра В-В, на фіг. 5 - варіант мехатронної системи керування поступальним переміщенням платформи. Механізм-гексапод (фіг. 1) має нерухому платформу 1 зі столом 2, рухому платформу 3 із робочим органом 4, шість механізмів поступального переміщення корпусу 5, і вихідні елементи 6 яких з'єднані шарнірами 7 і 8 відповідно з нерухомою та рухомою платформами. Шарніри 7 виконані з можливістю їх переміщення вздовж напрямних 9, розміщених на нерухомій платформі, шарніри 8 мають гідростатичні або аеростатичні підшипники, розташовані в корпусах 10, 12 (фіг. 2). регульованих мехатронною системою 11 (на фіг.2 показано частково). При цьому шарніри мають сфери 8 (фіг. 3), закріплені на вихідних елементах механізмів поступальних переміщень та корпуси 10, 12-14, розміщені на рухомій платформі. В корпусах виконано кармани 15 (фіг. 4), підключені через дроселі 16 та пропорційні розподільники 17 до джерела стисненої рідини 18. Зазор між сферою 8 і корпусами 10, 12-14 опори має величину 0,1-0,12 мм більшу можливих похибок геометрії, кінематики, статичних і динамічних деформацій всіх ланок механізму-гексаподу. Всі гідростатичні сферичні шарніри керуються мехатронною системою, один із варіантів якої (фіг. 5) включає три пропорційні розподільники 17, 19, 20 (P1, P2, Р3). Дана мехатронна система забезпечує переміщення рухомої платформи 3 в напрямках х, у, z в межах зазору між сферами 8 і корпусами 10, 12-14 опор. Механізм-гексапод працює наступним чином. При переміщенні вихідного елемента 6 відносно корпуса 5 (фіг. 1) змінюється просторове положення рухомої платформи 3. Одночасним переміщенням всіх шести механізмів поступальних переміщень (показано стрілками L1-L6) робочий орган 4 рухається за заданим законом в межах робочого простору, обмеженого величиною ходу механізмів поступальних переміщень. Для переміщення робочого органу за межами цього діапазону шарніри 7 переміщуються вздовж напрямних 9. Переміщення 1 UA 73729 U 5 10 15 20 25 30 35 всіх шести шарнірів (показано стрілками Н1-Н6 на фіг. 2) забезпечує необхідне збільшення робочої зони. В процесі функціонування механізму мають місце похибки приводів, статичні та динамічні деформації. Вони викликають змінні в часі похибки положення робочого органу х, y, z. Компенсація динамічних похибок досягається ефективним демпфуванням вібрацій в шарі рідини або газу між сферами 8 і корпусами 12 шарнірів. Статичні похибки компенсуються мехатронною системою 11. Система має пристрої для вимірів точного положення рухомої платформи і відповідно визначення статичних (постійних в часі) похибок положення платформи. Для компенсації цих похибок, положення сфер 8 шарнірів, встановлених на рухомій платформі, регулюється мехатронною системою 11, яка забезпечує мікропереміщення сфер 8 відносно корпусів 10-13. При цьому, рухома платформа 3 переміщується в напрямках х, у, z, компенсуючи похибки приводів. Переміщення сфер кожного із шарнірів забезпечується додатковою подачею рідкого середовища в корпуси 10, 12-14 за допомогою пропорційних розподільників 17, 19, 20 (фіг. 3). Наприклад, переміщення сфери 8 в напрямку х забезпечується додатковою подачею рідини до корпусів 10 і 12 або зменшенням подачі рідини до корпусу 13. Переміщення сфери 8 в напрямку у забезпечується додатковою подачею рідини до корпусу 10 із одночасним зменшенням подачі до корпусу 12. Переміщення сфери 8 в напрямку z (фіг. 4) забезпечується збільшенням подачі рідини до корпусів 10, 12, 13 при одночасному зменшенні подачі до корпусу 14. Всі шість шарнірів, розташованих на рухомій платформі, керуються одночасно трьома розподільниками (фіг. 5), тому здійснюється одночасне переміщення рухомої платформи 3 в напрямках х, у, z. Переміщення платформи має місце в межах зазорів, між сферою і корпусами (0,1-0,12 мм). Даний зазор виконано більшим від можливих похибок геометрії, кінематики, статичних і динамічних деформацій всіх ланок механізму-гексаподу. Тому переміщення рухомої платформи за допомогою мехатронної системи дає можливість компенсувати основні похибки механізму, суттєвим чином, підвищуючи його точність. Цим вирішується задача підвищення точності механізму. Розглянута система призначена для підвищення точності поступального переміщення рухомої платформи. При використанні шести пропорційних розподільників мехатронна система придатна для компенсації похибок як поступальних, так і поперечно-кутових переміщень рухомої платформи. Джерела інформації: 1. Кузнецов Ю.Н., Дмитриев Д.О., Диневич Г.Ю. Компоновки станков с механизмами параллельной структуры - Херсон: ПП. Вышемирський B.C., 2009.-456 с. 2. Верстат-гексапод. Патент України №54937. МПК B21D 5/00 / Крижанівський В.А., Валявський І.А. Опубл. 17.03.2003, Бюл. №3 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 Механізм-гексапод, який містить нерухому та рухому платформи із робочим органом, шість механізмів поступального переміщення корпусів, вихідні елементи яких шарнірно з’єднані відповідно з нерухомою та рухомою платформами, а шарніри, встановлені на нерухомій платформі, виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі, який відрізняється тим, що шарніри, встановлені на рухомій платформі, виконані у вигляді гідростатичних або аеростатичних сферичних підшипників, зазор яких регулюється мехатронною системою, причому шарніри мають сфери, закріплені на вихідних елементах механізмів поступальних переміщень, та корпуси, розміщені на рухомій платформі, а в шарнірах виконано кармани, підключені через дроселі та пропорційні гідророзподільники до джерела стисненої рідини, причому зазори між сферою і шарнірами виконані з можливістю уникнення похибки геометрії, кінематики, статичних та динамічних деформацій всіх ланок механізму-гексаподу. 2 UA 73729 U 3 UA 73729 U 4 UA 73729 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюHexapod mechanism
Автори англійськоюStrutynskyi Serhii Vasyliovych, Hurzhii Andrii Andriiovych
Назва патенту російськоюМеханизм-гексапод
Автори російськоюСтрутинский Сергей Васильевич, Гуржий Андрей Андреевич
МПК / Мітки
МПК: B21D 5/00
Мітки: механізм-гексапод
Код посилання
<a href="https://ua.patents.su/7-73729-mekhanizm-geksapod.html" target="_blank" rel="follow" title="База патентів України">Механізм-гексапод</a>
Верстат-гексапод
Номер патенту: 54937
Опубліковано: 17.03.2003
Автори: Валявський Іван Анатолійович, Крижанівський Володимир Андрійович
МПК: B21D 5/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, який складається з нерухомої платформи зі столом, рухомої платформи з робочим органом, шести механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами, який відрізняється тим, що шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі.
Верстат-гексапод
Номер патенту: 63437
Опубліковано: 10.10.2011
Автори: Валявський Анатолій Іванович, Павленко Іван Іванович, Вахніченко Дмитро Володимирович, Валявський Іван Анатолійович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з нерухомої платформи з робочим столом, рухомої платформи, на якій змонтована шпиндельна головка, та шести кінематичних ланок змінної довжини, що шарнірно з'єднують рухому і нерухому платформи, робочий стіл виконаний за схемою гексапода і складається з нерухомої і рухомої платформ, які також шарнірно зв'язані кінематичними ланками змінної довжини, який відрізняється тим, що застосовується робочий стіл,...
Верстат-гексапод
Номер патенту: 63432
Опубліковано: 10.10.2011
Автори: Павленко Іван Іванович, Валявський Анатолій Іванович, Вахніченко Дмитро Володимирович, Валявський Іван Анатолійович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з нерухомої платформи з робочим столом, рухомої платформи, на якій змонтована шпиндельна головка, та шести кінематичних ланок змінної довжини, шпиндельна головка складається з нерухомої та рухомої платформ, що шарнірно зв'язані шістьма кінематичними ланками змінної довжини, який відрізняється тим, що використовується шпиндельна головка, виконана за схемою гексапод, що надає інструменту додатково шість...
Верстат-гексапод
Номер патенту: 63442
Опубліковано: 10.10.2011
Автори: Валявський Іван Анатолійович, Валявський Анатолій Іванович, Вахніченко Дмитро Володимирович, Павленко Іван Іванович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з основи, трьох штанг, кільця та платформи, з'єднаних шістьма додатковими напрямними у формі конічної стрижневої ферми, шести опорних шарнірів, виконавчого органа з відповідним інструментом і шести кінематичних ланок змінної довжини, на основі змонтований робочий стіл з оброблюваною деталлю, який відрізняється тим, що кінематичні ланки, які з'єднують напрямні, розташовані на нерухомій основі з рухомим...
Стіл
Номер патенту: 54936
Опубліковано: 17.03.2003
Автори: Крижанівський Володимир Андрійович, Валявський Іван Анатолійович
МПК: B23Q 1/00
Мітки: стіл
Формула / Реферат:
Стіл, який складається з основи, виконаної у вигляді призми, рухомої платформи, шести штанг постійної довжини, кінці яких шарнірно зв'язані з рухомою платформою та основою, який відрізняється тим, що шарніри, які зв'язують штанги з основою, виконані з можливістю переміщення вздовж напрямних, розташованих на гранях основи.
Попередній патент: Інгібітор кислотної корозії металів “ундем”
Наступний патент: Процес отримання готівки в банківських терміналах без використання пластикової картки шляхом використання платіжного доручення
Випадковий патент: Ендоліфт для виконання лапароскопічних операцій