Пристрій для оптимізації перевантажування зернової маси із збиральної машини на транспортні засоби (варіанти)
Формула / Реферат
1. Пристрій для оптимізації перевантажування зернової маси із збиральної машини на транспортні засоби, який відрізняється тим, що на збиральній машині (1) встановлені щонайменше один блок керування (3) для генерування сигналів керування швидкістю руху і/або кутом повороту транспортного засобу (5), передавальний пристрій (11) для бездротової передачі сигналів керування на транспортний засіб (5), на якому встановлений приймальний пристрій (6) для приймання цих сигналів, і щонайменше один, встановлений на транспортному засобі (43), регулювальний пристрій (7А, 7В) для автоматичного регулювання швидкості руху і/або кута повороту залежно від сигналів керування.
2. Пристрій за п. 1, який відрізняється тим, що містить щонайменше один перемикач (25) для перемикання транспортного засобу (5) з ручного керування швидкістю руху і/або кутом повороту на автоматичне і навпаки.
3. Пристрій за будь-яким з пп. 1 або 2, який відрізняється тим, що блок керування (3) на збиральніймашині (1) може використовуватися вручну.
4. Пристрій за будь-яким з пп. 1-3, який відрізняється тим, що на збиральній машині (1) і транспортному засобі (5) встановлено по приймачу глобальної супутникової системи радіовизначення, переважно по приймачу фазорізницевої глобальної супутникової системи радіовизначення, причому на транспортному засобі (5) встановлений передавальний пристрій для передачі сигналів глобальної супутникової системи радіовизначення, а на збиральній машині (1) - приймальний пристрій для приймання сигналів глобальної супутникової системи радіовизначення від транспортного засобу (5).
5. Пристрій за будь-яким з пп. 1-4, який відрізняється тим, що на збиральній машині (1) встановлений щонайменше один датчик (оптичний, акустичний або радар) для визначення взаємного положення збиральної машини (1) і транспортного засобу (5).
6. Пристрій за будь-яким з пп. 1-5, який відрізняється тим, що дійсна швидкість руху і/або дійсний кут повороту збиральної машини (1) використовуються блоком керування (3) як сигнали керування швидкістю руху і/або кутом повороту транспортного засобу (5).
7. Пристрій для оптимізації перевантажування зернової маси із збиральної машини на транспортні засоби, який відрізняється тим, що щонайменше на одному транспортному засобі (5, 43) або на збиральній машині (1) встановлений щонайменше один із пристроїв, який обирає статус транспортного засобу, на якому він розташований, для використання щонайменше у одному пристрої щонайменше в одному транспортному засобі або у збиральній машині.
8. Пристрій за п. 7, який відрізняється тим, що щонайменше один транспортний засіб (5, 43) або збиральна машина (1), що перебуває на оброблюваному полі, обладнані пристроєм для індикації статусу транспортного засобу (1, 5), наприклад, світлом (10) різного кольору.
9. Пристрій щонайменше за одним з пп. 7 або 8, який відрізняється тим, що має лінію зв'язку для передачі інформації про статус одного транспортного засобу (5, 43) або збиральної машини (1) щонайменше на один інший транспортний засіб (5, 43) або збиральну машину (1).
10. Пристрій щонайменше за будь-яким з пп. 7-9, який відрізняється тим, що має можливість передачі інформації про статус транспортного засобу відповідно до заданого пріоритету.
11. Пристрій за будь-яким з пп. 7-10, який відрізняється тим, що щонайменше одним, встановленим на транспортному засобі (5, 43) або збиральній машині (1), пристроєм визначається статус цього пристрою, дані про який передаються на передавальний пристрій (11) по лінії передачі даних (60, 80), а потім дані про цей статус циклічно передаються залежно від подій і/або на зовнішній запит про цей статус.
12. Пристрій за будь-яким з пп. 7-11, який відрізняється тим, що статус транспортного засобу має можливість змінюватися за командою пристрою, що знаходиться на ньому, або зовнішнього пристрою.
13. Пристрій за будь-яким з пп. 7-12, який відрізняється тим, що щонайменше одна функція транспортного засобу при зміні його статусу керується або щонайменше контролюється перехідною функцією, заданою пристроєм, що знаходиться на цьому транспортному засобі, або зовнішнім пристроєм.
14. Пристрій за будь-яким з пп. 7-13, який відрізняється тим, що має можливість бути переведеним водієм збиральної машини (1) за допомогою зміни статусу іншого транспортного засобу (5, 43) у позицію очікування в стані зупинки, у позицію очікування в стані переміщення на відстані від збиральної машини (1), у керовану позицію (перевантажування) в стані переміщення на відстані від збиральної машини (1) і/або у позицію очікування в стані переміщення в напрямку до іншого транспортного засобу (5, 43).
15. Пристрій за будь-яким з пп. 11-14, який відрізняється тим, що пристрій для координації транспортного засобу (5, 43) або збиральної машини (1) на оброблюваному полі (39) через пристрій керування поворотом і/або напрямком руху зв'язаний щонайменше з пристроєм для визначення статусу щонайменше одного транспортного засобу (5, 43) або збиральної машини (1).
Текст
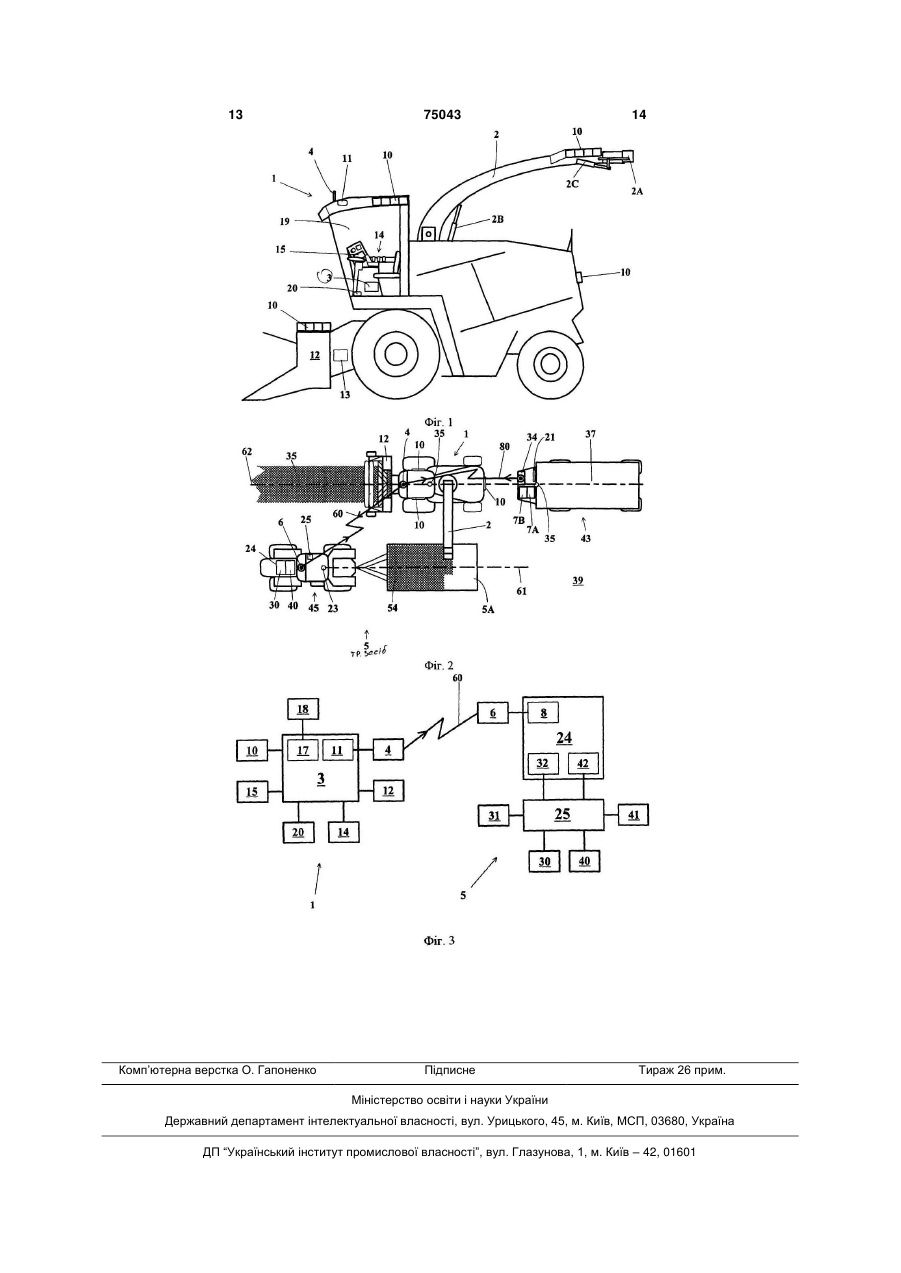
1. Пристрій для оптимізації перевантажування зернової маси із збиральної машини на транспортні засоби, який відрізняється тим, що на збиральній машині (1) встановлені щонайменше один блок керування (3) для генерування сигналів керування швидкістю руху і/або кутом повороту транспортного засобу (5), передавальний пристрій (11) для бездротової передачі сигналів керування на транспортний засіб (5), на якому встановлений приймальний пристрій (6) для приймання цих сигналів, і щонайменше один, встановлений на транспортному засобі (43), регулювальний пристрій (7А, 7В) для автоматичного регулювання швидкості руху і/або кута повороту залежно від сигналів керування. 2. Пристрій за п. 1, який відрізняється тим, що містить щонайменше один перемикач (25) для перемикання транспортного засобу (5) з ручного керування швидкістю руху і/або кутом повороту на автоматичне і навпаки. 3. Пристрій за будь-яким з пп. 1 або 2, який відрізняється тим, що блок керування (3) на збиральній машині (1) може використовуватися вручну. 4. Пристрій за будь-яким з пп. 1-3, який відрізняється тим, що на збиральній машині (1) і транспортному засобі (5) встановлено по приймачу глобальної супутникової системи радіовизначення, переважно по приймачу фазорізницевої глобальної супутникової системи радіовизначення, причому на транспортному засобі (5) встановлений передавальний пристрій для передачі сигналів глобальної супутникової системи радіовизначення, 2 (19) 1 3 75043 4 цього пристрою, дані про який передаються на ним водієм збиральної машини (1) за допомогою передавальний пристрій (11) по лінії передачі дазміни статусу іншого транспортного засобу (5, 43) них (60, 80), а потім дані про цей статус циклічно у позицію очікування в стані зупинки, у позицію передаються залежно від подій і/або на зовнішній очікування в стані переміщення на відстані від запит про цей статус. збиральної машини (1), у керовану позицію (пере12. Пристрій за будь-яким з пп. 7-11, який відрізвантажування) в стані переміщення на відстані від няється тим, що статус транспортного засобу має збиральної машини (1) і/або у позицію очікування в можливість змінюватися за командою пристрою, стані переміщення в напрямку до іншого транспорщо знаходиться на ньому, або зовнішнього притного засобу (5, 43). 15. Пристрій за будь-яким з пп. 11-14, який відрізстрою. 13. Пристрій за будь-яким з пп. 7-12, який відрізняється тим, що пристрій для координації трансняється тим, що щонайменше одна функція транпортного засобу (5, 43) або збиральної машини (1) спортного засобу при зміні його статусу керується на оброблюваному полі (39) через пристрій керуабо щонайменше контролюється перехідною фунвання поворотом і/або напрямком руху зв'язаний кцією, заданою пристроєм, що знаходиться на щонайменше з пристроєм для визначення статусу цьому транспортному засобі, або зовнішнім прищонайменше одного транспортного засобу (5, 43) строєм. або збиральної машини (1). 14. Пристрій за будь-яким з пп. 7-13, який відрізняється тим, що має можливість бути переведе Винахід стосується пристрою для оптимізації перевантажування зернової маси із збиральної машини на транспортні засоби. Такі збиральні машини, як зернові комбайни і польові подрібнювачі, в період збирання безперервно приймають масу збираного врожаю, відомим способом обробляють та вивантажують її або безперервно (наприклад, у випадку польового подрібнювача), або ж після проміжного зберігання (наприклад, у випадку зернозбирального комбайна) у вантажні контейнери. З цією метою збиральні машини обладнані перевантажувальними пристроями. У зернозбиральному комбайні перевантажувальний пристрій виконаний у вигляді випускної труби зернового бункера, у польовому подрібнювачі - у вигляді вивантажувальної труби. Вантажний контейнер може знаходитися безпосередньо на транспортному засобі або на приєднаному до нього причепі. При безперервному вивантаженні зернової маси, як у випадку польового подрібнювача, транспортний засіб пересувається біля збиральної машини або за нею. Перевантажування зернової маси при русі збиральної машини з виключенням її розсипання біля вантажного контейнера та з максимальним заповненням останнього є дуже складною задачею. У зернозбиральних комбайнах, що забезпечують проміжне зберігання зернової маси, її перевантажування (випорожнення зернового бункера) з метою заощадження часу найчастіше здійснюється також у процесі збирання, тобто під час руху комбайна. Відомі деякі пристрої, що вирішують задачу оптимізації перевантажування зібраної маси. У цих пристроях за допомогою оптичних або акустичних датчиків визначають положення збиральної машини щодо транспортного засобу або положення перевантажувального пристрою щодо вантажного контейнера. Потім за цими даними перевантажувальний пристрій вручну чи автоматично встановлюють на оптимальне перевантажування зернової маси. При цьому як перевантажувальні пристрої можуть бути використані різні механізми регулювання, наприклад, поворотна у вертикальному і горизонтальному напрямках вивантажувальна труба польового подрібнювача. Крім того, на кінці вивантажувальної труби може бути встановлений поворотний дефлектор, за допомогою якого можна додатково змінювати напрямок потоку зернової маси. Такого роду пристрій відомий, наприклад, з патенту ФРН №4426059 А1. Тут передбачена камера, у зоні контролю якої перебуває як дефлектор, так і вантажний контейнер, причому зображення вивантажувальної труби з дефлектором показується водію польового подрібнювача на моніторі для керування перевантажувальним пристроєм. Усі ці пристрої мають недолік, який полягає в їх відмовах через брак досвіду або неуважність водія польового подрібнювача, а також через пересування вантажного контейнера у зоні, що знаходиться за межами можливості корегування перевантажувального пристрою шляхом зміни його встановлення. Тому задачею винаходу є створення пристрою для оптимізації перевантажування зернової маси незалежного від водія транспортного засобу. Ця задача вирішується, відповідно до винаходу, тим, що на збиральній машині передбачений щонайменше один блок керування для генерування сигналів, керуючих швидкістю руху і/або кутом повороту транспортного засобу. Поряд з цим, на збиральній машині встановлений передавальний пристрій для бездротової передачі керуючих сигналів на транспортний засіб. На транспортному засобі передбачений приймальний пристрій для приймання переданих із збиральної машини керуючих сигналів. Крім того, на транспортному засобі передбачений щонайменше один регулювальний пристрій для автоматичного регулювання швидкості його руху (так званий обгінний регулятор) і/або кута повороту (автопілот). Цей пристрій (або ці 5 75043 6 пристрої) керується сигналами, переданими із системи радіовизначення. За цими даними, відпозбиральної машини, так що регулювальний привідно до винаходу, блок керування автоматично стрій (або пристрої) забезпечує регулювання швирозраховує сигнали керування швидкістю і/або дкості руху і/або кута повороту транспортного закутом повороту транспортного засобу. Для пересобу в залежності від цих керуючих сигналів. При дачі даних глобальної супутникової системи рацьому фахівець може звернутися до відомих придіовизначення з транспортного засобу на збирастроїв регулювання швидкості і кута повороту тральну машину передбачені передавальний пристрій нспортного засобу. на транспортному засобі і приймальний пристрій Відповідно до іншої форми виконання винахона збиральній машині. Більш прийнятно, по одноду, встановлений на транспортному засобі, наприму передавальному і по одному приймальному клад, у кабіні водія, щонайменше один перемикач пристрою встановлено як на збиральній машині, може перемикати регулювання швидкості і/або так і на транспортному засобі. кута повороту транспортного засобу з ручного кеВідповідно до ще однієї форми виконання вирування водієм на автоматичне керування від кенаходу, передбачене використання дійсних знаруючих сигналів, завдяки чому водію у будь-який чень швидкості руху і/або кута повороту збиральчас надається можливість вільного вибору між ної машини для визначення сигналів керування ручним керуванням транспортним засобом і автошвидкістю руху і/або кутом повороту транспортноматичним дистанційним керуванням із збиральної го засобу. При цьому транспортний засіб автомамашини. Водій транспортного засобу керує ним тично підстроюється за швидкістю руху і/або кутом вручну в позиції перевантажування і потім за баповороту до збиральної машини. В основному важанням приводить в дію перемикач, в результаті ріанті виконання винаходу швидкість руху і/або кут чого з цього моменту регулювання швидкості руху повороту транспортного засобу завжди безпосетранспортного засобу або кута його повороту, або редньо підстроюється до швидкості руху і/або кута того й іншого здійснюється із збиральної машини. повороту збиральної машини без передачі цих З міркувань безпеки, керування транспортним параметрів із транспортного засобу на збиральну засобом можна перевести з автоматичного на румашину. чне, наприклад, приведенням в дію кермового коВідповідно до наступного варіанта виконання леса або педалі газу, чи ножного гальма і тим савинаходу, із транспортного засобу передаються мим відключити автоматичне керування. його дійсні параметри (величини швидкості руху Відповідно до однієї з форм виконання винаі/або кута повороту) на збиральну машину, де походу передбачено, щоб блок керування на збиратім блок керування генерує з урахуванням цих льній машині використовувався вручну її водієм дійсних параметрів поправочний коефіцієнт у видля генерування сигналів керування швидкістю гляді сигналу керування швидкістю руху і/або куі/або кутом повороту транспортного засобу. З цією том повороту транспортного засобу. Для передачі метою блок керування розташований у кабіні водія інформації про вказані дійсні параметри транспорі виконаний, наприклад, у вигляді координатної тного засобу на збиральну машину, відповідно до ручки. Водій збиральної машини шляхом переміцього варіанта виконання винаходу, на транспортщення координатної ручки уперед або назад може, ному засобі також передбачений передавальний наприклад, збільшити або зменшити швидкість пристрій, який переважно об'єднується в прийматранспортного засобу, а бічним її переміщенням льно-передавальний пристрій. повернути транспортний засіб праворуч або лівоЯкщо збиральна машина обладнана регуляторуч. Водій збиральної машини, котрий, на противаром обгону для регулювання швидкості руху і/або гу водію транспортного засобу, сидить вище, здатавтопілотом для регулювання кута повороту, то ний керувати транспортним засобом для блок керування, генеруючий сигнали керування забезпечення оптимального перевантажування. швидкістю руху і/або кутом повороту транспортноЯк альтернатива ручному впливу на блок кего засобу, використовує дані регулятора обгону рування передбачене визначення взаємного поі/або автопілота. ложення збиральної машини і транспортного заКрім того, виконаний відповідно до винаходу собу з використанням відомих фахівцю датчиків пристрій має ефективний аварійний захист, особ(оптичних, акустичних), а також радара. На основі ливо при переміщенні транспортного засобу за визначеного в такий спосіб взаємного положення збиральною машиною, як це, наприклад, необхідзбиральної машини і транспортного засобу блок но для запобігання зіткненню транспортного засокерування, відповідно до винаходу, автоматично бу з польовим подрібнювачем. Якщо польовий розраховує сигнали керування швидкістю і/або подрібнювач, наприклад, різко гальмує при раптокутом повороту транспортного засобу. вій появі перешкоди, то блок керування може геВідповідно до ще однієї форми виконання винерувати сигнал на гальмування або зупинку, який находу, як на збиральній машині, так і на транспопередається на транспортний засіб. Необхідний ртному засобі встановлений локаційний пристрій, для цього час складає лише частку часу реакції наприклад, так званий приймач глобальної супутводія транспортного засобу. никової системи радіовизначення, переважно Ще одне вирішення задачі здійснюється приприймач фазорізницевої глобальної супутникової строєм, який є щонайменше на одному транспортсистеми радіовизначення, для визначення полоному засобі і який обирає статус щонайменше того ження цих машин. При цьому на збиральну машитранспортного засобу, на якому він знаходиться, ну з транспортного засобу передаються дані про причому використовується щонайменше один тайого дійсне положення, визначені за допомогою кий пристрій щонайменше на одному транспортприймача фазорізницевої глобальної супутникової ному засобі. Цей пристрій дозволяє визначати 7 75043 8 дійсний стан транспортного засобу за його статуполі зору водія, наприклад, на передній стінці вансом, що може знайти застосування для керування тажного контейнера. У ще одному пристрої на подальшими процесами в транспортному засобі. приймаючому сигнали транспортному засобі моТаким чином збиральна машина працює в нормажуть бути інші реакції на передані йому дані про льному режимі при збиранні врожаю. Інший статус статус цього транспортного засобу. У цьому випазбиральної машини визначається спрацьовувандку при передачі із збиральної машини інформації ням пристрою захисту від її пошкодження, наприпро змінений її статус, наприклад, про раптову її клад, спрацьовуванням металодетектора в підбизупинку, водій транспортного засобу може реагурачі, що призводить до статусу миттєвої зупинки вати відповідним зменшенням швидкості руху або машини. Про цей статус оператор транспортного перевіркою цього статусу в пристрої на транспортзасобу інформується акустичним або оптичним ному засобі, або безпосереднім генеруванням сигсигналом. Відповідно до подальшого розвитку виналу зупинки транспортного засобу, наприклад, з находу, при настанні цього статусу сигнал передавикористанням системи керування приводом. Крім ється безпосередньо на привід ходової частини, а того, для передачі подальших команд може бути також на гальма, чим забезпечується швидка зувикористана лінія зв'язку між транспортними засопинка транспортного засобу. Це забезпечує ту бами. Для цього, наприклад, на мобільному блоці перевагу, що щонайменше збиральний транспортє інші індикатори, наприклад, у вигляді світлових ний засіб вже не може збирати врожай з оброблюстрілок, що вказують напрямок руху транспортного ваного поля або ж деяка кількість зібраної маси засобу. накопичується перед підбирачем чи в ньому. Відповідно до ще однієї форми виконання виВідповідно до ще однієї форми виконання винаходу, передбачений пріоритет для даних про находу, щонайменше один транспортний засіб на статус транспортного засобу, що передаються, оброблюваному полі обладнаний пристроєм, який завдяки чому більш значущу інформацію про стазабезпечує видиму зовні індикацію статусу відпотус транспортного засобу можна відрізнити від відного транспортного засобу, наприклад, у вигляменш значущої і, таким чином, наприклад, в окреді світлових сигналізаторів різного кольору. Це дає мих пристроях на приймальному транспортному ту перевагу, що з іншого транспортного засобу засобі можна розділити і профільтрувати реакції можна зчитати інформацію про статус першого на дані про статус іншого транспортного засобу за транспортного засобу Це особливо важливо при рівнем їх значимості. збиранні врожаю в темряві, коли візуальний зв'яВідповідно до ще однієї форми виконання визок між водіями вже недостатній, і цей недолік находу, щонайменше один встановлений на транусувається виконаною відповідно до винаходу інспортному засобі пристрій визначає його дійсний дикацією статусу транспортного засобу. При перестатус, подає інформацію про цей статус на перевантажуванні зернової маси на транспортний засіб давальний пристрій і потім ця інформація передайого водій одержує інформацію про статус збирається циклічно, в залежності від подій і/або на зальної машини за відсутності переговорного або пит, що надійшов, про статус транспортного візуального зв'язку між водіями. Крім того, на обзасобу, за рахунок чого досягається зниження нароблюваному полі можуть перебувати інші трансвантаження на лінію передачі даних, оскільки, напортні засоби. У цьому випадку транспортні засоби приклад, дані про дійсний статус транспортного обладнані індикаторними пристроями, що вказузасобу передаються циклічно. Якщо тепер на трають їхній статус, наприклад, статус "Очікування в нспортному засобі або збиральній машині відбувазупиненому стані" вказується зеленим світлом, ється якась подія, що призводить до зміни його статус "Порожній транспортний засіб " - миготлистатусу, то ця зміна статусу використовується для вим світлом, а статус "Заповнений транспортний передачі даних про дійсний статус транспортного засіб" - вимиканням світла або червоним світлом. засобу або збиральної машини. Крім того, є можКрім того, така інформація про статус транспортливість відкликання даних про статус транспортноного засобу може підтверджуватися акустичними го засобу або збиральної машини також по лінії засобами або багатоколірними індикаторами. Якзв'язку між ними. Особливу перевагу це має для що деякі транспортні засоби виконані безекіпажтранспортного засобу або збиральної машини, не ними, може виникнути необхідність у використанні обладнаних видимим зовні індикаторним пристроінших видів індикації їхнього статусу. єм для індикації дійсного їхнього статусу, або якщо Відповідно до ще однієї форми виконання висигнали про цей статус перекриваються чи можуть находу, інформація про статус одного транспортбути поза полем зору водія. ного засобу передається щонайменше ще на один Відповідно до ще однієї форми виконання виінший транспортний засіб по лінії зв'язку. Для цьонаходу, статус транспортного засобу змінюється го здійснюється подальше удосконалення приза командою розташованого на ньому або поза строю шляхом забезпечення можливості індикації ним пристрою, завдяки чому водію може передастатусу транспортного засобу у будь-якому місці ватися інформація від датчика команд. Якщо, найого перебування незалежно від миттєвого його приклад, вантажний контейнер заповнений, то про положення. Наприклад, інформація про статус це насамперед дізнається водій збиральної машиіншого транспортного засобу передається по лінії ни. Потім, відповідно до винаходу, можна дистанпередачі даних, а потім індиціюється на моніторі ційно змінювати статус відповідного транспортного оператора або на індикаторному пристрої. Цей засобу, наприклад, в статус "Транспортний засіб індикаторний пристрій може бути виконаний у визаповнений". Така форма виконання винаходу гляді мобільного блока, обладнаного приймальним особливо придатна для керування безекіпажними пристроєм, і встановлений у будь-якому місці в транспортними засобами. Якщо такий транспорт 9 75043 10 ний засіб знаходиться на оброблюваному полі, то перевантажується зібрана маса, вже до повного водій збиральної машини може бачити дійсний заповнення вантажного контейнера встановлювастатус транспортного засобу на індикаторі або ж вся б у відповідне положення відносно транспортзробити запит про нього по лінії зв'язку. Якщо ж в ного засобу із статусом "Порожній транспортний полі зору водія збиральної машини на оброблювазасіб". При повному заповненні вантажного конній ділянці з'являється непрацюючий або очікуютейнера водій збиральної машини перевстановчий перевантажування транспортний засіб, то він лює перевантажувальний пристрій таким чином, може при необхідності шляхом зміни його статусу щоб зібрана маса надходила у вантажний контейдати команду на автоматичний рух за збиральною нер транспортного засобу із статусом "Порожній машиною. Автоматичний рух транспортного засотранспортний засіб". Відразу після цього транспобу за збиральною машиною відбувається тоді, ртний засіб із заповненим вантажним контейнером коли водій транспортного засобу бачить на індикавстановлюється в положення очікування відносно торі цю команду або, у випадку безекіпажного тразбиральної машини і транспортного засобу із станспортного засобу, відбувається автоматична котусом "Порожній транспортний засіб" і утримується ординація його положення щодо збиральної в цьому положенні. Потім координуючий пристрій машини. Окремі транспортні засоби для їх ідентипо лінії зв'язку змінює статус "Порожній транспортфікації у міру потреби обладнані спеціальними ний засіб" на статус "Вантажний контейнер заповвидимими зовні розпізнавальними знаками, або ж нений" або "Заповнення" і встановлює цей трансможуть бути запитані по лінії зв'язку про їхній стапортний засіб у положення перевантажування. тус. Потім статус заповненого транспортного засобу Відповідно до ще однієї форми виконання визмінюється на статус "Транспортний засіб заповнаходу, водій збиральної машини може за допомонений" і він переміщається в керованому пологою пристрою керування статусом привести транженні очікування відносно збиральної машини. спортний засіб у положення очікування в Якщо тепер збиральний транспортний засіб досязупиненому стані, у положення очікування в стані гає, наприклад, краю оброблюваного поля, то старуху на відстані від збиральної машини, у кероватус транспортного засобу із заповненим вантажне положення в стані руху на відстані від іншого ним контейнером змінюється на статус транспортного засобу і/або у положення очікуван"Заповнений в стані зупинки" з пов'язаним з цим ня в стані руху на відстані від іншого транспортностатусом власним керуванням, наприклад, керуго засобу. В залежності від встановленого статусу ванням гальмами або зупинкою двигуна ходової транспортного засобу можна задати йому відповічастини Цей транспортний засіб тепер може відодну реакцію або відповідне поводження. Відповідкремитися від збиральної машини і з використанно до положення збиральної машини і обраного ням ручного керування рухатися до місця розванстатусу можна координувати положення інших таження вантажного контейнера. Потім на краю транспортних засобів відносно збиральної машини оброблюваного поля із збирального транспортного й утримувати їх у наступних положеннях. засобу можна, як передбачено винаходом, шля- в положенні перевантажування зібраної маси хом зміни статусу привести в дію відповідний приіз збиральної машини у відповідний вантажний стрій координації транспортного засобу, що очікує, контейнер, розташований, наприклад, на транспоз екіпажем чи без нього, або ж надати йому ручнортному засобі, що переміщається паралельно го керування. збиральній машині; Винахід пояснюється кресленнями, що дода- в положенні очікування, при якому зібрана ються. маса не перевантажується на транспортний засіб, На Фіг.1 подано вигляд збоку збиральної маякий, наприклад, рухається по колії збиральної шини 1, підбирач 12 якого приймає масу збираного машини; врожаю, обробляє її і через вивантажувальну тру- в іншому положенні очікування, при якому зібу 2, виконану у вигляді перевантажувального брану масу невдовзі почнуть перевантажувати на пристрою, перевантажує її на транспортний засіб. транспортний засіб, який, наприклад, переміщаПоказаний також регулювальний орган 2В для ється паралельно збиральній машині. вертикального повороту вивантажувальної труби 2 При зміні статусу транспортного засобу або і регулювальний орган 2С для перестановки дезбиральної машини інформація про це передаєтьфлектора 2А, розташованого на кінці вивантажуся в залежності від пріоритету та обладнання відвальної труби 2. У кабіні 19 водія збиральної маповідного транспортного засобу і збиральної машини 1 біля сидіння встановлений пульт 14 з шини на інші транспортні засоби або збиральну кнопками і перемикачами, а також з регулювальмашину і після цього їм задаються відповідні реакними елементами та індикаторами 15 для обслуції. говування і контролю пристроїв та органів керуВідповідно до винаходу, із збиральної машини вання збиральної машини 1. На пульті 14 можна задавати координацію транспортного засознаходиться блок керування 3 для визначення бу також в залежності від дійсного статусу окремопараметрів руху щонайменше одного транспортго транспортного засобу або збиральної машини. ного засобу. Блок 3 з'єднаний з іншими пристрояЗавдяки цьому заміною транспортного засобу моми в збиральній машині 1, наприклад, через шинну жна керувати таким чином, щоб транспортний залінію зв'язку, і реєструє регульовані параметри сіб із статусом "Порожній транспортний засіб" пемашини 1, інформацію про керуючі дії водія та все ред перевантажуванням встановлювався б у інше, що відбувається у збиральній машині 1. Яквідповідне положення відносно збиральної машищо, наприклад, металодетектор 13 видає сигнал ни, а транспортний засіб, на який в даний момент про наявність металу на вході машини 1, то цей 11 75043 12 сигнал розпізнається блоком керування 3. На підзасобу 5 за допомогою ще одного навігаційного лозі кабіни водія встановлений перемикальний пристрою з антеною 18 глобальної супутникової елемент 20, за допомогою якого водій збиральної системи радіовизначення розраховує положення машини може керувати індикаторним пристроєм збиральної машини 1 і генерує відповідний сигнал 10 і тим самим передавати команди про рух водію для керування швидкістю і/або кутом повороту транспортного засобу. На індикаторному пристрої транспортного засобу 5. Ці сигнали передаються 10 позначені різні місця збиральної машини 1. Пепо лінії зв'язку 60 на відповідний пристрій керуванрше позначене на індикаторному пристрої місце ня 24 і відповідним чином використовуються у може бути на підбирачі 12, друге - на кабіні водія пристрої керування приводом 32 та пристрої керу19, третє - на вивантажувальній трубі, наступне - у вання поворотом 42. Крім того, у кабіні водія тягазадній зоні машини 1. При цьому індикаторний ча 45 передбачений перемикач 25, за допомогою пристрій 10 може бути встановлений у будь-якому якого перемикають керування транспортним засомісці збиральної машини 1 і, поряд з цим, у вигляді бом 5 з ручного керування його швидкістю і/або мобільного пристрою на транспортному засобі. На кутом повороту на автоматичне і навпаки. Фіг.1 подані чотири індикаторних елементи для Другий транспортний засіб 43 виконаний у виіндикації можливих напрямків руху. Індикаторний гляді безекіпажного транспортного засобу з напівпристрій 10 особливо придатний для індикації дійпричіпним вантажним контейнером 37 і рухається сного стану (статусу) збиральної машини 1. Відпопо колії 62 в позиції очікування при автоматичному відний індикаторний пристрій 10 може бути також керуванні його положенням відносно збиральної встановлений на інших транспортних засобах для машини 1. На транспортному засобі 43 встановлеіндикації їхнього власного статусу. До блока керуна антена 35 глобальної супутникової системи вання 3 підключений передавальний пристрій 11 з радіовизначення, а також пристрій 7А керування антеною 4. Передавальний пристрій 11 здійснює кутом повороту і пристрій 7В керування швидкістю. бездротову передачу даних у вигляді задання Транспортний засіб 43 одержує сигнали керування швидкості і/або кута повороту транспортного засорухом та іншу інформацію по лінії зв'язку 80 з вибу. Цей пристрій може бути виконаний також у користанням власного пристрою зв'язку 34. Крім вигляді приймально-передавального пристрою, того, на транспортному засобі 43 встановлений здатного передавати сигнали та інформацію у індикаторний пристрій 21, завдяки якому водій двох напрямках. збиральної машини 1 може одержувати інформаНа Фіг.2 показано вигляд зверху оброблюваноцію про дійсний статус транспортного засобу 43. го поля 39, на якому перебувають збиральна маНа Фіг.3 подана схема виконаного відповідно шина 1 і два транспортних засоби 5 і 43. При цьодо винаходу пристрою. Збиральна машина 1 місму передбачено, щоб із збиральної машини 1 тить блок керування 3, в якому встановлені навігаможна було керувати також і декількома транспорційний блок 17 з антеною 18 глобальної супутнитними засобами 5, 43 із забезпеченням можливоскової системи радіовизначення і передавальний ті виведення транспортного засобу 5 з позиції пепристрій 11 з антеною 4. Крім того, блок керування ревантажування і одночасного переведення 3 сполучений з антеною 15, пультом 14 і щонайнаступного транспортного засобу 43 з позиції очіменше з одним індикаторним пристроєм 10. Блок кування в позицію перевантажування. Показаний керування 3 керує також станом перемикального на Фіг.2 транспортний засіб 5 складається з тягача елемента 20 і метало детектора 13. До транспорт45 і причепленого до нього вантажного контейнера ного засобу 5 належить також лінія зв'язку 60. У 5А. Під час перевантажування зернової маси 54 у пристрої керування 24 розташований приймальвантажний контейнер 5А через вивантажувальну ний пристрій 6 з антеною 8. Пристрій керування 24 трубу 2 контейнер 5А вже частково заповнений обробляє передані із збиральної машини 1 сигназерновою масою 54. Транспортний засіб 5 перели і на основі заданої швидкості руху генерує в міщається по колії 61 паралельно колії 62 збирапристрої керування приводом 32 регульований льної машини 1, причому його рухом керують тапараметр для приводу ходової частини 30, а в ким чином, щоб він перебував в позиції пристрої керування поворотом 42 - регульований перевантажування відносно збиральної машини 1. параметр для рульового механізму 40. В залежноКолія 62 збиральної машини 1 задається розташусті від положення перемикача 25 керування приванням зернової маси 35 на оброблюваному полі водом ходової частини 30 здійснюється згідно із 39. За допомогою навігаційного пристрою і встанозаданим пристроєм керування приводом 32 регувленої в ньому антени глобальної супутникової льованим параметром або ж водієм з використансистеми радіовизначення визначають положення ням педалі газу 31. Керування рульовим механізтранспортного засобу 5 на оброблюваному полі 39 мом 40 здійснюється також в залежності від і за допомогою передавального пристрою з антеположення перемикача 25 на основі задання регуною 8 по лінії зв'язку 60 передають інформацію льованого параметра пристроєм керування повопро положення транспортного засобу 5 на збираротом 42 або ж шляхом ручного керування, наприльну машину 1. Встановлений у машині 1 пристрій клад, кермовим колесом 41. за інформацією про положення транспортного 13 Комп’ютерна верстка О. Гапоненко 75043 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice to optimize reloading of grain mass from a harvester onto transport means (variants)
Автори англійськоюBehnke Willi
Назва патенту російськоюУстройство для оптимизации перегрузки зерновой массы из уборочной машины на транспортные средства (варианты)
Автори російськоюБенке Вилли
МПК / Мітки
МПК: A01D 90/00, A01B 73/00
Мітки: оптимізації, машини, засоби, пристрій, маси, зернової, перевантажування, транспортні, збиральної, варіанти
Код посилання
<a href="https://ua.patents.su/7-75043-pristrijj-dlya-optimizaci-perevantazhuvannya-zernovo-masi-iz-zbiralno-mashini-na-transportni-zasobi-varianti.html" target="_blank" rel="follow" title="База патентів України">Пристрій для оптимізації перевантажування зернової маси із збиральної машини на транспортні засоби (варіанти)</a>
Пристрій для навантаження сипучого матеріалу у транспортні засоби, що рухаються, “logmac”
Номер патенту: 13066
Опубліковано: 15.03.2006
Автори: Литвинський Гаррі Григорович, Волошин Віктор Борисович
МПК: B65G 67/22
Мітки: сипучого, рухаються, logmac, транспортні, засоби, пристрій, навантаження, матеріалу
Формула / Реферат:
1. Пристрій для навантаження сипучого матеріалу в транспортні засоби, що рухаються, який містить приймальний бункер із затвором і приводом, який відрізняється тим, що його оснащено шнеком, розташованим над секторним затвором поперечно до напрямку руху транспортного засобу.2. Пристрій за п. 1, який відрізняється тим, що за секторним затвором по напрямку руху транспортного засобу розміщено ущільнювальний коток, який притискується до...
Пристрій для перевантаження сільськогосподарських матеріалів із збиральної машини на транспортний контейнер
Номер патенту: 72437
Опубліковано: 15.03.2005
Автори: Сєбастьян Гамбле, Хрістоф Бусманн, Норберт Дікханс, Йохен Хустер
МПК: A01D 34/00
Мітки: перевантаження, транспортний, матеріалів, контейнер, збиральної, сільськогосподарських, пристрій, машини
Формула / Реферат:
1. Пристрій для перевантаження сільськогосподарських матеріалів із збиральної машини на транспортний контейнер з використанням поворотного перевантажувального пристрою, який відрізняється тим, що кут між поворотним перевантажувальним пристроєм і поздовжньою віссю збиральної машини виконаний регульованим в залежності від параметрів
Спосіб резервування й продажу квитків на транспортні засоби
Номер патенту: 5582
Опубліковано: 15.03.2005
Автор: Гришин Сергій Геннадійович
МПК: G06F 19/00
Мітки: засоби, продажу, спосіб, резервування, квитків, транспортні
Формула / Реферат:
1. Спосіб резервування й продажу квитків на транспортні засоби, який характеризується тим, що включає зберігання в головному комп'ютері бази даних з інформацією про розклад руху й про наявність місць на конкретні рейси, надавання можливості доступу до цієї інформації через мережу Інтернет покупцям, надавання покупцеві на моніторі його комп'ютера після того, як він вибрав конкретний рейс, схеми розташування місць у транспортному засобі, на...
Спосіб захисту робочих органів збиральної машини при попаданні сторонніх предметів та пристрій для його здійснення
Номер патенту: 24683
Опубліковано: 04.08.1998
Автори: Борошок Лев Абрамович, Нєдовєсов Віктор Іванович
МПК: A01D 75/00
Мітки: збиральної, машини, предметів, спосіб, органів, захисту, сторонніх, робочих, здійснення, пристрій, попаданні
Формула / Реферат:
1. Спосіб захисту робочих органів збиральної машини при попаданні сторонніх предметів, в якому визначають наявність стороннього аварійнонебезпечного предмета в рослинній масі, яка подається до технологічних переробляючих робочих органів, після чого зупиняють подаючий механізм, який відрізняється тим, що вимірюють механічні коливання по всій поверхні платформи зрізаючого чи підбираючого механізма і по параметрам цих коливань судять про те, що...
Пристрій для подачі сипучих матеріалів зі стрічкового конвейєра на інші транспортні засоби
Номер патенту: 9791
Опубліковано: 30.09.1996
Автори: Нєнахов Сєргєй Сєргєєвіч, Монастирський Віталій Федорович, Бокій Ігор Борисович, Карачабан Ніколай Грігорьєвіч, Пєтрєнко Владімір Алєксєєвіч, Кіяшко Олег Іванович
МПК: B65G 47/34
Мітки: сипучих, пристрій, матеріалів, подачі, інші, засоби, транспортні, стрічкового, конвейєра
Формула / Реферат:
(57) Устройство для подачи сыпучих материалов с ленточного конвейера на другие транспортные средства, включающее расположенный на основании под барабаном разгрузочного конца ленточного конвейера бункер с двумя продольными бортами, два примыкающих к бункеру лотка для направления потока материала а приемные транспортные средства, подвижный в плоскости, параллельной ботам бункера, отсекатель, выполненный в виде клина с двумя рабочими...
Попередній патент: Спусковий механізм і спосіб здійснення пострілу боєприпасом
Наступний патент: Спосіб селективного відокремлення феруму з розчину та спосіб рециркуляції каталізатора
Випадковий патент: Спосіб доопераційної диференційної діагностики доброякісних та злоякісних новоутворень щитовидної залози