Індуктивно-ємнісний інтегральний датчик прискорення
Номер патенту: 78516
Опубліковано: 25.03.2013
Автори: Дубінець Владислав Іванович, Гуменюк Сергій Михайлович

Формула / Реферат
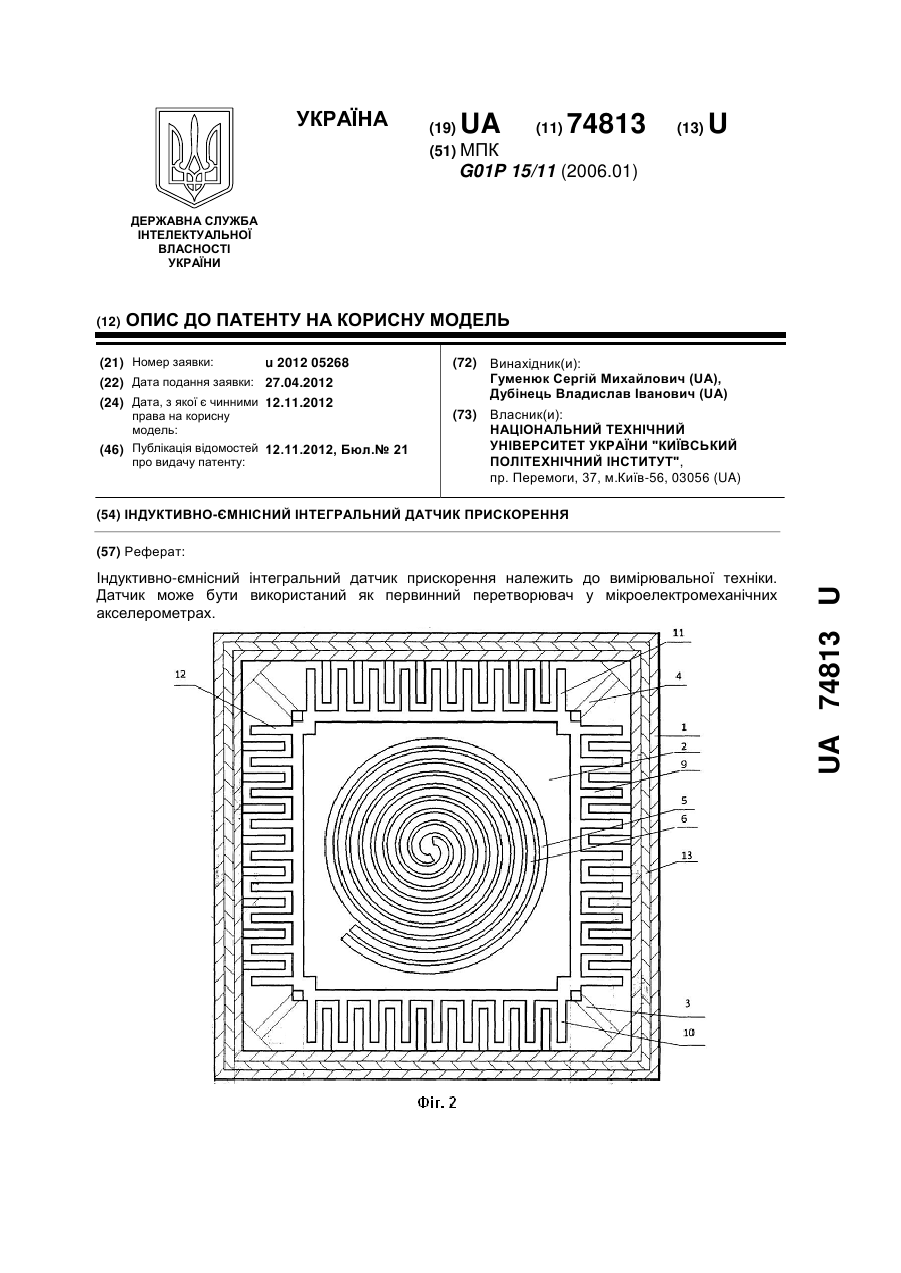
Індуктивно-ємнісний інтегральний датчик прискорення, що містить нерухомий корпус та масу, які утворюють між собою ємнісний зазор; пружні балки, які кріплять масу до корпусу; плоскі котушки індуктивності розміщені з двох боків маси, перпендикулярно до осі чутливості, та з двох боків в середині корпусу, перпендикулярно до осі чутливості, який відрізняється тим, що плоскі котушки виготовлені три-, чотири- або багатокутної форми.
Текст
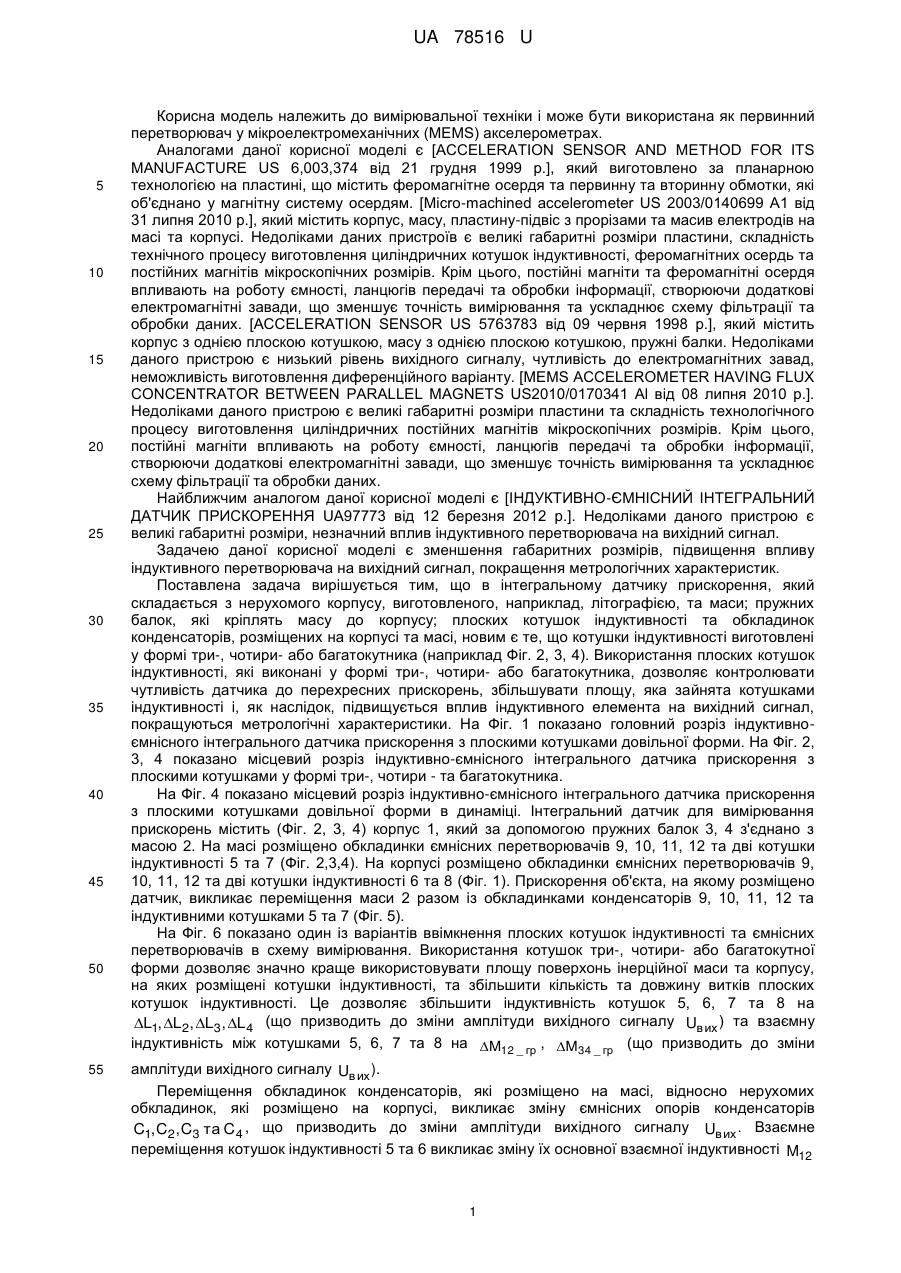
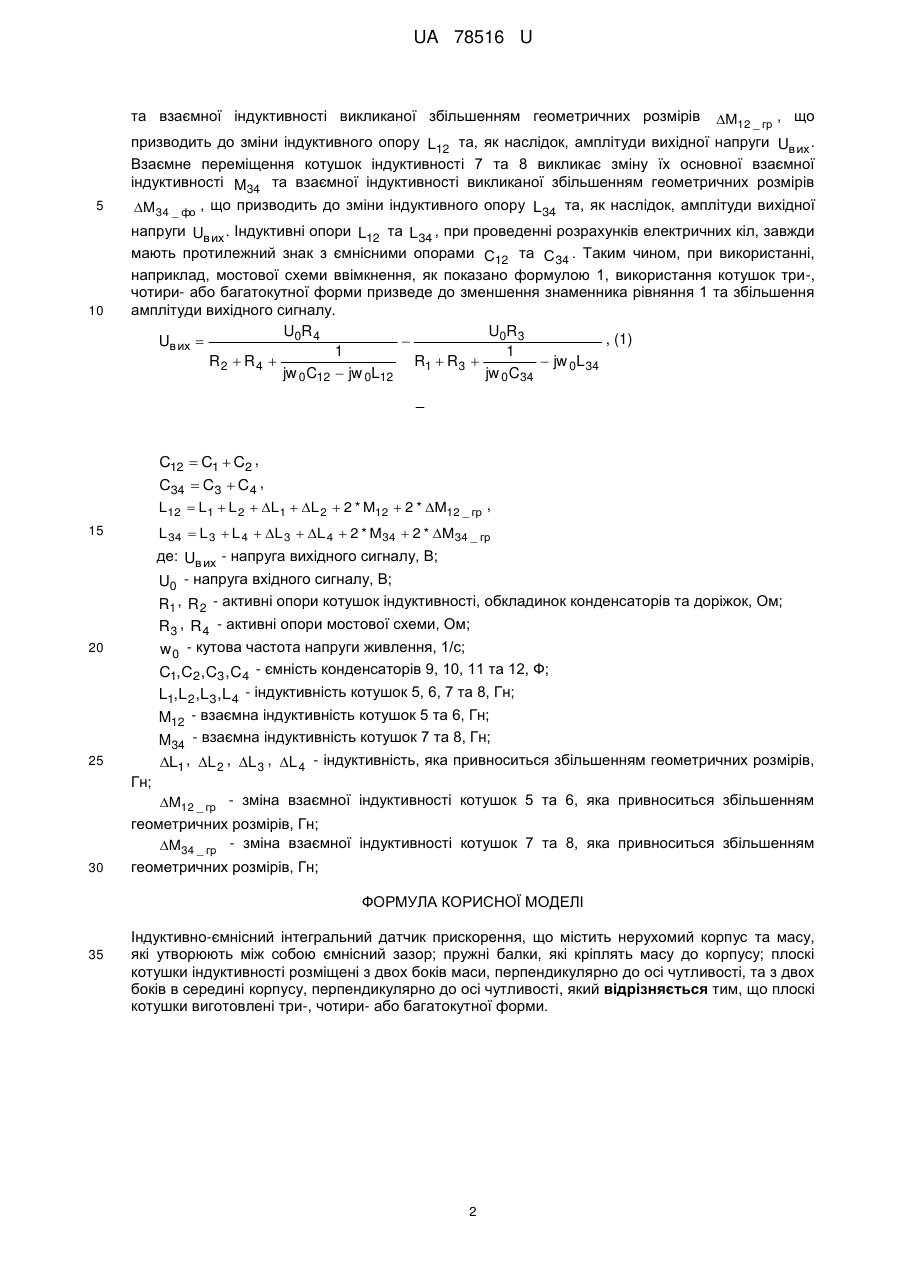
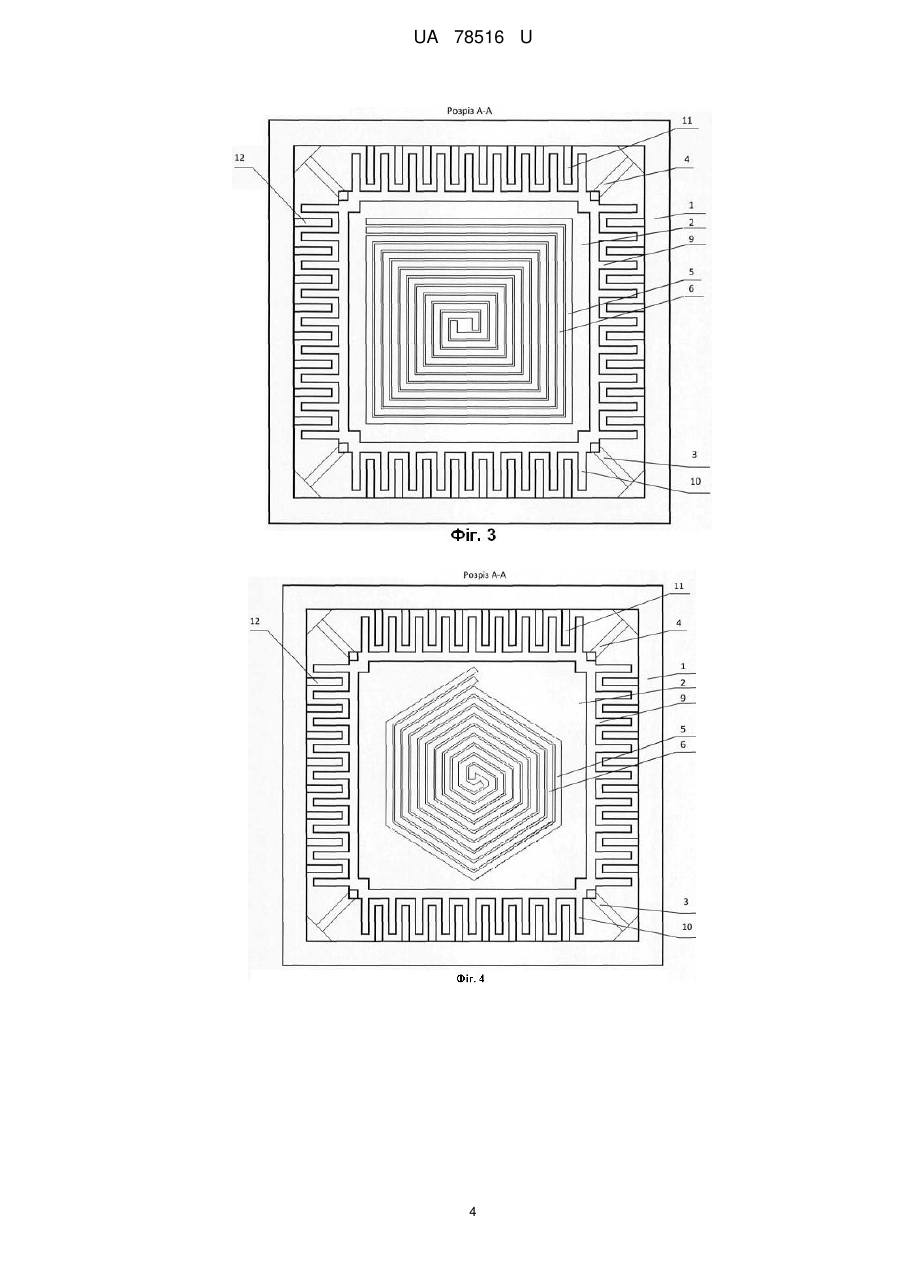
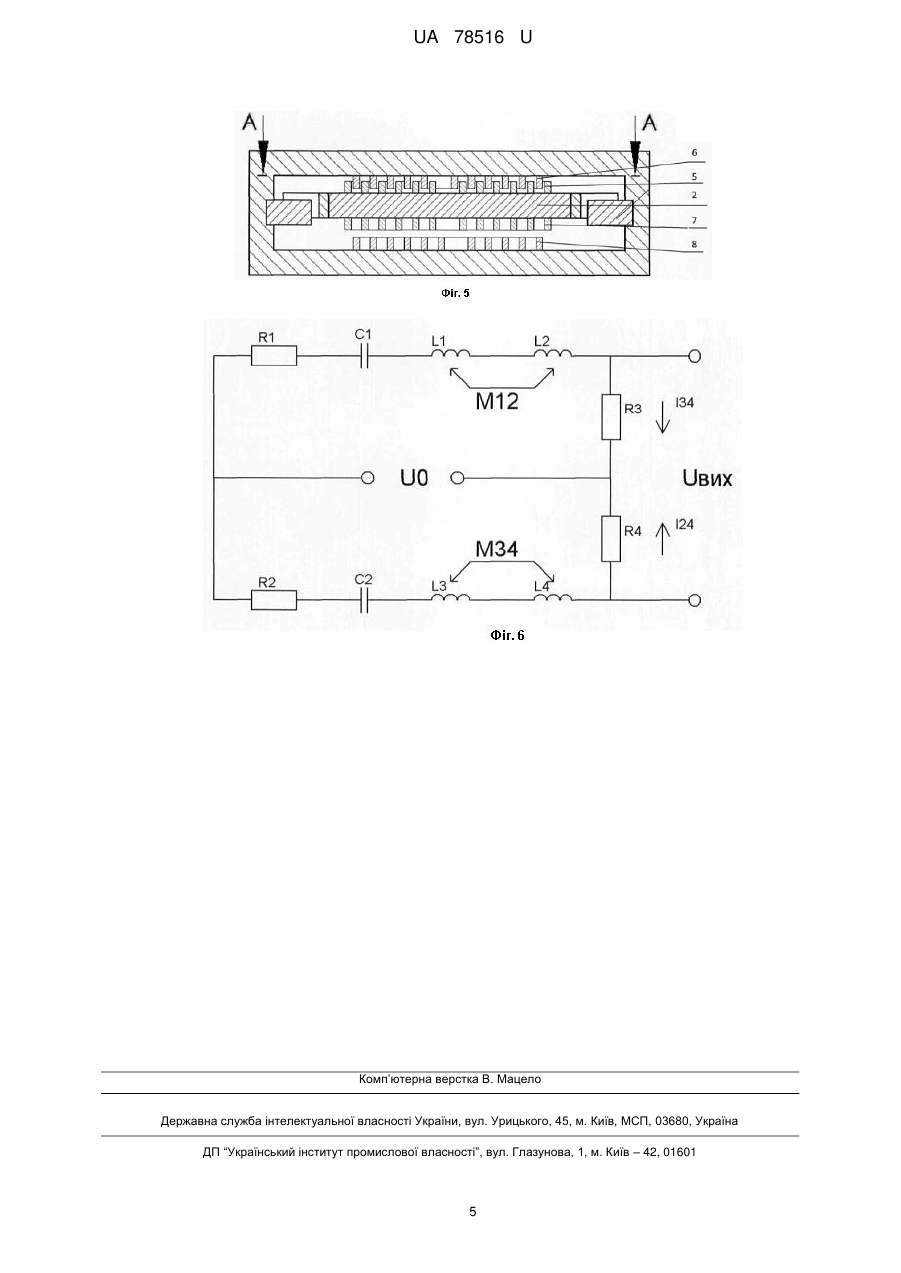
Реферат: UA 78516 U UA 78516 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до вимірювальної техніки і може бути використана як первинний перетворювач у мікроелектромеханічних (MEMS) акселерометрах. Аналогами даної корисної моделі є [ACCELERATION SENSOR AND METHOD FOR ITS MANUFACTURE US 6,003,374 від 21 грудня 1999 p.], який виготовлено за планарною технологією на пластині, що містить феромагнітне осердя та первинну та вторинну обмотки, які об'єднано у магнітну систему осердям. [Micro-machined accelerometer US 2003/0140699 А1 від 31 липня 2010 p.], який містить корпус, масу, пластину-підвіс з прорізами та масив електродів на масі та корпусі. Недоліками даних пристроїв є великі габаритні розміри пластини, складність технічного процесу виготовлення циліндричних котушок індуктивності, феромагнітних осердь та постійних магнітів мікроскопічних розмірів. Крім цього, постійні магніти та феромагнітні осердя впливають на роботу ємності, ланцюгів передачі та обробки інформації, створюючи додаткові електромагнітні завади, що зменшує точність вимірювання та ускладнює схему фільтрації та обробки даних. [ACCELERATION SENSOR US 5763783 від 09 червня 1998 p.], який містить корпус з однією плоскою котушкою, масу з однією плоскою котушкою, пружні балки. Недоліками даного пристрою є низький рівень вихідного сигналу, чутливість до електромагнітних завад, неможливість виготовлення диференційного варіанту. [MEMS ACCELEROMETER HAVING FLUX CONCENTRATOR BETWEEN PARALLEL MAGNETS US2010/0170341 Al від 08 липня 2010 p.]. Недоліками даного пристрою є великі габаритні розміри пластини та складність технологічного процесу виготовлення циліндричних постійних магнітів мікроскопічних розмірів. Крім цього, постійні магніти впливають на роботу ємності, ланцюгів передачі та обробки інформації, створюючи додаткові електромагнітні завади, що зменшує точність вимірювання та ускладнює схему фільтрації та обробки даних. Найближчим аналогом даної корисної моделі є [ІНДУКТИВНО-ЄМНІСНИЙ ІНТЕГРАЛЬНИЙ ДАТЧИК ПРИСКОРЕННЯ UA97773 від 12 березня 2012 p.]. Недоліками даного пристрою є великі габаритні розміри, незначний вплив індуктивного перетворювача на вихідний сигнал. Задачею даної корисної моделі є зменшення габаритних розмірів, підвищення впливу індуктивного перетворювача на вихідний сигнал, покращення метрологічних характеристик. Поставлена задача вирішується тим, що в інтегральному датчику прискорення, який складається з нерухомого корпусу, виготовленого, наприклад, літографією, та маси; пружних балок, які кріплять масу до корпусу; плоских котушок індуктивності та обкладинок конденсаторів, розміщених на корпусі та масі, новим є те, що котушки індуктивності виготовлені у формі три-, чотири- або багатокутника (наприклад Фіг. 2, 3, 4). Використання плоских котушок індуктивності, які виконані у формі три-, чотири- або багатокутника, дозволяє контролювати чутливість датчика до перехресних прискорень, збільшувати площу, яка зайнята котушками індуктивності і, як наслідок, підвищується вплив індуктивного елемента на вихідний сигнал, покращуються метрологічні характеристики. На Фіг. 1 показано головний розріз індуктивноємнісного інтегрального датчика прискорення з плоскими котушками довільної форми. На Фіг. 2, 3, 4 показано місцевий розріз індуктивно-ємнісного інтегрального датчика прискорення з плоскими котушками у формі три-, чотири - та багатокутника. На Фіг. 4 показано місцевий розріз індуктивно-ємнісного інтегрального датчика прискорення з плоскими котушками довільної форми в динаміці. Інтегральний датчик для вимірювання прискорень містить (Фіг. 2, 3, 4) корпус 1, який за допомогою пружних балок 3, 4 з'єднано з масою 2. На масі розміщено обкладинки ємнісних перетворювачів 9, 10, 11, 12 та дві котушки індуктивності 5 та 7 (Фіг. 2,3,4). На корпусі розміщено обкладинки ємнісних перетворювачів 9, 10, 11, 12 та дві котушки індуктивності 6 та 8 (Фіг. 1). Прискорення об'єкта, на якому розміщено датчик, викликає переміщення маси 2 разом із обкладинками конденсаторів 9, 10, 11, 12 та індуктивними котушками 5 та 7 (Фіг. 5). На Фіг. 6 показано один із варіантів ввімкнення плоских котушок індуктивності та ємнісних перетворювачів в схему вимірювання. Використання котушок три-, чотири- або багатокутної форми дозволяє значно краще використовувати площу поверхонь інерційної маси та корпусу, на яких розміщені котушки індуктивності, та збільшити кількість та довжину витків плоских котушок індуктивності. Це дозволяє збільшити індуктивність котушок 5, 6, 7 та 8 на L1, L 2, L3 , L 4 (що призводить до зміни амплітуди вихідного сигналу Uв их ) та взаємну індуктивність між котушками 5, 6, 7 та 8 на M12 _гр , M34 _ гр (що призводить до зміни амплітуди вихідного сигналу Uв их ). Переміщення обкладинок конденсаторів, які розміщено на масі, відносно нерухомих обкладинок, які розміщено на корпусі, викликає зміну ємнісних опорів конденсаторів C1, C2 , C3 та C 4 , що призводить до зміни амплітуди вихідного сигналу Uв их . Взаємне переміщення котушок індуктивності 5 та 6 викликає зміну їх основної взаємної індуктивності M12 1 UA 78516 U та взаємної індуктивності викликаної збільшенням геометричних розмірів M12 _ гр , що призводить до зміни індуктивного опору L12 та, як наслідок, амплітуди вихідної напруги Uв их . Взаємне переміщення котушок індуктивності 7 та 8 викликає зміну їх основної взаємної індуктивності M34 та взаємної індуктивності викликаної збільшенням геометричних розмірів 5 10 M34 _ фо , що призводить до зміни індуктивного опору L 34 та, як наслідок, амплітуди вихідної напруги Uв их . Індуктивні опори L12 та L 34 , при проведенні розрахунків електричних кіл, завжди мають протилежний знак з ємнісними опорами С12 та С 34 . Таким чином, при використанні, наприклад, мостової схеми ввімкнення, як показано формулою 1, використання котушок три-, чотири- або багатокутної форми призведе до зменшення знаменника рівняння 1 та збільшення амплітуди вихідного сигналу. U0R 4 U0R 3 , (1) Uв их 1 1 R2 R4 R1 R 3 jw 0L 34 jw 0 C12 jw 0L12 jw 0 C34 C12 C1 C2 , C34 C3 C 4 , L12 L1 L 2 L1 L 2 2 * M12 2 * M12 _ гр , L 34 L 3 L 4 L 3 L 4 2 * M34 2 * M34 _ гр 15 де: Uв их - напруга вихідного сигналу, В; U0 - напруга вхідного сигналу, В; 20 25 Гн; R1 , R 2 - активні опори котушок індуктивності, обкладинок конденсаторів та доріжок, Ом; R 3 , R 4 - активні опори мостової схеми, Ом; w 0 - кутова частота напруги живлення, 1/с; C1, C2 , C3 , C4 - ємність конденсаторів 9, 10, 11 та 12, Ф; L1,L 2 ,L 3 ,L 4 - індуктивність котушок 5, 6, 7 та 8, Гн; M12 - взаємна індуктивність котушок 5 та 6, Гн; M34 - взаємна індуктивність котушок 7 та 8, Гн; L1 , L 2 , L 3 , L 4 - індуктивність, яка привноситься збільшенням геометричних розмірів, M12 _ гр - зміна взаємної індуктивності котушок 5 та 6, яка привноситься збільшенням геометричних розмірів, Гн; M34 _ гр - зміна взаємної індуктивності котушок 7 та 8, яка привноситься збільшенням 30 геометричних розмірів, Гн; ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 Індуктивно-ємнісний інтегральний датчик прискорення, що містить нерухомий корпус та масу, які утворюють між собою ємнісний зазор; пружні балки, які кріплять масу до корпусу; плоскі котушки індуктивності розміщені з двох боків маси, перпендикулярно до осі чутливості, та з двох боків в середині корпусу, перпендикулярно до осі чутливості, який відрізняється тим, що плоскі котушки виготовлені три-, чотири- або багатокутної форми. 2 UA 78516 U 3 UA 78516 U 4 UA 78516 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюInductive-capacitive integral acceleration transducer
Автори англійськоюHumeniuk Serhii Mykhailovych, Dubinets Vladyslav Ivanovych
Назва патенту російськоюИндуктивно-емкостный интегральный датчик ускорения
Автори російськоюГуменюк Сергей Михайлович, Дубинец Владислав Иванович
МПК / Мітки
МПК: G01P 15/125, G01P 15/11
Мітки: індуктивно-ємнісний, датчик, інтегральній, прискорення
Код посилання
<a href="https://ua.patents.su/7-78516-induktivno-ehmnisnijj-integralnijj-datchik-priskorennya.html" target="_blank" rel="follow" title="База патентів України">Індуктивно-ємнісний інтегральний датчик прискорення</a>
Індуктивно-ємнісний інтегральний датчик прискорення
Номер патенту: 97773
Опубліковано: 12.03.2012
Автори: Гуменюк Сергій Михайлович, Дубінець Владислав Іванович
МПК: G01P 15/11, G01P 15/125
Мітки: індуктивно-ємнісний, прискорення, інтегральній, датчик
Формула / Реферат:
Інтегральний датчик прискорення, який складається з нерухомого корпусу та маси; пружних балок, які кріплять масу до корпусу, котушок індуктивності, розміщених на масі та корпусі, який відрізняється тим, що котушки індуктивності (5, 7; Фіг. 2) виготовлені плоскими з двох боків маси, перпендикулярно до осі чутливості та з двох боків (6, 8; Фіг. 2) всередині корпусу, перпендикулярно до осі чутливості, таким чином, щоб при переміщенні маси вони...
Індуктивно-ємнісний інтегральний датчик прискорення
Номер патенту: 78511
Опубліковано: 25.03.2013
Автори: Дубінець Владислав Іванович, Гуменюк Сергій Михайлович
МПК: G01P 15/125, G01P 15/11
Мітки: інтегральній, індуктивно-ємнісний, датчик, прискорення
Формула / Реферат:
Індуктивно-ємнісний інтегральний датчик прискорення, що містить нерухомий корпус та масу, які утворюють між собою ємнісний зазор; упругі балки, які кріплять масу до корпусу; плоскі котушки індуктивності розміщені з двох боків маси, перпендикулярно до осі чутливості, та з двох боків всередині корпусу, перпендикулярно до осі чутливості, який відрізняється тим, що всередині інерційної маси розміщена ділянка з феромагнітного матеріалу.
Індуктивно-ємнісний інтегральний датчик прискорення
Номер патенту: 74813
Опубліковано: 12.11.2012
Автори: Дубінець Владислав Іванович, Гуменюк Сергій Михайлович
МПК: G01P 15/11
Мітки: індуктивно-ємнісний, прискорення, датчик, інтегральній
Формула / Реферат:
Індуктивно-ємнісний інтегральний датчик прискорення, що містить нерухомий корпус та масу, які утворюють між собою ємнісний зазор, пружні балки, які кріплять масу до корпуса; плоскі котушки індуктивності розміщені з двох боків маси, перпендикулярно до осі чутливості, та з двох боків всередині корпуса, перпендикулярно до осі чутливості, який відрізняється тим, що додатково містить екран, який розміщений всередині корпуса датчика або на...
Двопараметричний індуктивно-ємнісний генераторний датчик
Номер патенту: 61067
Опубліковано: 11.07.2011
Автори: Ліщинська Людмила Броніславівна, Рожкова Яна Сергіївна, Філинюк Микола Антонович
МПК: G01P 3/44
Мітки: датчик, індуктивно-ємнісний, генераторний, двопараметричний
Формула / Реферат:
Двопараметричний індуктивно-ємнісний генераторний датчик, який містить транзисторну схему, три резистори, конденсатор, індуктивний первинний вимірювальний перетворювач іммітансу, загальну шину та шину живлення, причому витік транзистора приєднаний до першого виводу першого резистора, другий вивід якого з'єднаний з шиною живлення, стік транзистора з'єднаний з першим виводом другого резистора та першим виводом індуктивного первинного...
Інтегральний датчик прискорення та спосіб його виготовлення
Номер патенту: 29594
Опубліковано: 15.11.2000
Автори: Кравчина Віталій Вікторович, Горбань Олександр Миколайович
МПК: G01P 15/12
Мітки: прискорення, виготовлення, датчик, інтегральній, спосіб
Текст:
...толщиной 100-800 мкм, что обеспечивает возможность точного задания емкостного зазора и крепления датчика. Упругие балки содержат интегральные полупроводниковые приборы, что позволяет определять ускорение по электрическим характеристикам этих приборов независимо от определения ускорения по изменению емкости емкостного зазора. Пробная масса имеет не две, как в прототипе, а одну степень свободы, что позволяет точнее определить ускорение, это...
Попередній патент: Вузол тертя для випробування матеріалів на знос
Наступний патент: Спосіб підготовки зрізів біологічних тканин для дослідження їх оптичних властивостей
Випадковий патент: Вузол "захват" для рамного кріплення