Спосіб керування дводвигуновою силовою установкою гелікоптера
Номер патенту: 79857
Опубліковано: 13.05.2013
Автори: Волков Дмитро Іванович, Ранченко Геннадій Степанович, Данилов Всеволод Володимирович






Формула / Реферат
Спосіб керування дводвигуновою силовою установкою гелікоптера, який полягає в обчислюванні відхилень параметрів роботи газотрубного двигуна (ГТД), що регулюють, від заданих значень, виборі максимального значення відхилення в селекторі мінімуму, формуванні заданого значення витрат палива згідно із вибраним відхиленням та підтриманням заданих витрат палива, який відрізняється тим, що обчислювання відхилень параметрів роботи ГТД, що регулюють, виконують із використанням загального регулятора, а вибір параметра, що регулюють, виконують за допомогою інверсного селектора мінімуму, причому значення відхилень параметрів роботи ГТД від заданих значень корегують для компенсації відмінностей статичних та динамічних властивостей параметрів згідно із математичною моделлю двигуна із додатковим урахуванням наявності в каналі регулювання прискорення більшої на порядок похідної у диференційному рівнянні, та за значних відхилень параметрів роботи ГТД від заданих значень із гістерезисом примусово вмикають регулятор прискорення, а за малих відхилень виконують повільне регулювання параметрів роботи двигуна, крім того додатково здійснюють синхронізацію потужностей двигунів гелікоптера за рахунок симетричної різноспрямованої корекції для обох ГТД заданих значень частот обертання вільних турбін, та за відмови інформаційного обміну для синхронізації використовують відхилення обертового моменту від номінального значення, а роботу сусіднього двигуна детектують із використанням математичної моделі, крім того додатково виконують контроль відмов елементів системи автоматичного управління САУ та за умови відмови вимірювальних каналів використовують значення параметрів, що отримані від другого каналу управління САУ без передачі йому управління, а за умови відновлення роботоздатності вимірювального каналу використовують вимірювані ним значення параметрів, за умови відновлення роботоздатності каналу управління витратою палива (тільки за умови алгоритмічного виявлення відмови) його використовують у разі відмови каналу управління витратою палива в іншому каналі управління САУ.
Текст
Реферат: Спосіб керування дводвигуновою силовою установкою гелікоптера полягає в обчислюванні відхилень параметрів роботи газотрубного двигуна (ГТД), що регулюють від заданих значень, виборі максимального значення відхилення в селекторі мінімуму, формуванні заданого значення витрат палива згідно із вибраним відхиленням та підтриманням заданих витрат палива. UA 79857 U (54) СПОСІБ КЕРУВАННЯ ДВОДВИГУНОВОЮ СИЛОВОЮ УСТАНОВКОЮ ГЕЛІКОПТЕРА UA 79857 U UA 79857 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі авіаційного двигунобудування та може бути використана в системах (САУ) автоматичного управління газотурбінними двигунами (ГТД) з або без гідромеханічного резерву (FADEC). Науково-технічні досягнення, що втілено у двигунах четвертого та п'ятого покоління, потребують відповідного прогресу в управлінні та контролі роботою цих двигунів. Результатом є створення цифрових САУ у тому числі типу FADEC. Відомі на сьогодні цифрові САУ шляхом регулювання витрат палива та іноді зміною геометрії проточної частини забезпечують управління параметрами роботи двигуна такими, як частоти обертання роторів та їх прискорення, температура за турбіною низького тиску та її градієнт, тиск за компресором, обертовий момент на валу вільної турбіни та інші. Повинні забезпечуватися стійки робочі процеси та загальна роботоздатність САУ як на робочих режимах так і на нештатних, що можуть також бути пов'язані із відмовою каналів вводу-виводу, датчиків, виконавчих механізмів, цифрових вузлів та програмного забезпечення тощо. Підвищення відмовостійкості окрім програмно-апаратних рішень досягається за рахунок стовідсоткового покриття вузлів САУ системою вбудованого контролю, реалізації двох автономних каналів управління, використання математичної моделі. У разі установки декількох двигунів на літальний апарат, цифрові САУ з'єднуються цифровими каналами, які у тому числі використовуються задля передачі параметрів, що характеризують режим роботи двигунів, наприклад, такі як обертовий момент, частота обертання турбокомпресора, стан двигуна та інші. Відомий спосіб, який використовується у гідромеханічних синхронізаторах потужності (наприклад, СО-40), забезпечує синхронізацію режимів роботи двох спарених двигунів за рахунок порівняння тисків за їх компресорами і усунення різниці шляхом підвищення витрат палива двигуна із меншим тиском до урівноважування цих тисків. Недоліком гідромеханічного аналога є конструктивна складність та наявність помилки етатизму за рахунок реалізації у гідравлічній схемі П-закону регулювання. Відомий спосіб управління силовою установкою гелікоптера та особливо синхронізації потужностей сусідніх двигунів (АО "СТАР"). Синхронізація потужностей виконується за рахунок порівняння потужності двигуна на валу вільної турбіни шляхом вимірювання його кута крутіння (див. патент РФ № 2444464, В64С 27/04 (2006.01), опубл. 10.03.2012 та "Двигатель" № 2 (74) 2011. СУЧАСНА САУ ГЕЛІКОПТЕРНОГО ДВИГУНА). Обертовий момент двигунів за умов однакової частоти обертання вільної турбіни краще характеризує режим, ніж тиск за компресором. Силова установка гелікоптера складається з двох двигунів, які працюють на один тяговий гвинт. Цей спосіб полягає в визначенні для кожного двигуна величини відхилення частоти обертання вільної турбіни відносно заданої, її корекції за величиною відхилення виміряного обертового моментами даного та сусіднього двигунів. У випадку меншого значення обертового моменту у даного двигуна, здійснюють перетворення коригованої величини відхилення у величину необхідної зміни частоти обертання турбокомпресора, підсумовування її із заданою величиною частоти обертання турбокомпресора у залежності від кроку тягового гвинта. Далі визначається величина розбіжності заданої та фактичної частоти обертання турбокомпресора і її перетворення в управляючий вплив. Далі корегується задане значення частоти обертання турбокомпресорів за величиною розбіжності між поточною та заданою частотою обертання тягового гвинта. Недоліком цього способу є несиметричність реалізації алгоритму синхронізації, що призводить до відхилення частоти обертання вільної турбіни від заданого значення за часу перехідних процесів. До того ж контур синхронізації не працює у разі відмови цифрового каналу, якщо неможливо отримувати значення обертового моменту сусіднього двигуна. Відомий спосіб контролю, діагностування та компенсування відмов у системах управління двигунів, що наведений у патенті РФ № 2106514, МПК6 F02M65/00, опубл. 10.03.1998. Винахід передбачає порівняння вибраних для контролю параметрів із допустимими величинами та перехід на резервний канал управління у разі досягнення граничних значень. Додатково передбачається у разі відмови вимірювального каналу використання значень відповідних параметрів сусіднього двигуна. Недоліком відомого способу є те, що він передбачає безповоротний перехід на резервний канал управління у разі відмови каналів вводу-виводу, виконавчих механізмів або контурів управління-обмеження взагалі. Тобто вірогідність відмови каналу складається з вірогідності відмови елементів (вимірювальних каналів, каналів вводу-виводу дискретних сигналів, цифрових каналів тощо) та, як наслідок зростає на декілька порядків. Використання вимірювальних каналів САУ сусіднього двигуна шляхом заміщення елемента автоматики, що 1 UA 79857 U 5 10 15 20 25 30 35 40 45 50 55 відмовив, відповідним елементом сусіднього двигуна лише частково компенсує означений недолік. Відомий спосіб регулювання основних параметрів двигуна [див. Т.С. Мартьянова, Э.Н. Обрубова, В.И. Силюк „Математическая модель и программа расчѐта статических и динамических характеристик двигателя ТРЦЦ-2005А", ЦИАМ, 2005], який передбачає використання так званого селектора мінімуму витрат палива, що забезпечує непрямий вибір параметра, що регулюється або обмежується. Для кожного параметра роботи передбачається окремий регулятор (ПІД або похідний від нього), який формує задане значення витрат палива. Далі селектор мінімуму вибирає найменше значення витрати палива і регулятор витрат палива (регулятор паливного дозатора) підтримує витрати палива на цьому рівні. Дане технічне рішення вибрано прототипом. Прототип і спосіб, що заявляється, мають спільні ознаки, що полягають у розрахунку відхилень параметрів від заданих значень, вибиранні параметра роботи ГТД, що регулюється, шляхом використання селектора мінімуму, формуванні заданого значення витрат палива та їх відокремленому регулюванні (каскадна структура САУ). Недоліком прототипу щодо регулювання параметрів є необхідність узгодження роботи регуляторів-обмежувачів за умов зміни параметра або зміни режиму роботи (набір параметрів, задані значення тощо), яка полягає щонайменше в узгодженні інтегруючих складових цих окремих регуляторів та призводить до ускладнення програмної реалізації алгоритмів регулювання. До того ж регулятор прискорення (прийманості) виконує лише обмеження прискорення, що формується як наслідок роботи регулятора частоти обертання вільної турбіни. Це не дозволяє повністю використати потенціал двигуна щодо прийманості. В основу корисної моделі поставлена задача забезпечити: зниження вірогідності відмови електронного блока управління, вдосконалення управління параметрами роботи газотурбінного двигуна для підвищення показників якості управління та спрощення програмної реалізації алгоритмів регулювання. Зменшення впливу алгоритму синхронізації на регулювання частоти обертання вільної турбіни (гвинта) та забезпечення роботоздатності за умов відмови інформаційного обміну між каналами управління. Поставлена задача вирішується тим, що у способі керування дводвигуновою силовою установкою гелікоптера, який полягає в обчислюванні відхилень параметрів роботи ГТД, що регулюють, від заданих значень, виборі максимального значення відхилення в селекторі мінімуму, формуванні заданого значення витрат палива згідно із вибраним відхиленням та підтриманням заданих витрат палива, тим, що обчислювання відхилень параметрів роботи ГТД, що регулюють, виконують із використанням загального регулятора, а вибір параметра, що регулюють, виконують за допомогою інверсного селектора мінімуму, причому значення відхилень параметрів роботи ГТД від заданих значень корегують для компенсації відмінностей статичних та динамічних властивостей параметрів згідно із математичною моделлю двигуна із додатковим урахуванням наявності в каналі регулювання прискорення більшої на порядок похідної у диференційному рівнянні, та за значних відхилень параметрів роботи ГТД від заданих значень із гістерезисом примусово вмикають регулятор прискорення, а за малих відхилень виконують повільне регулювання параметрів роботи двигуна, крім того додатково здійснюють синхронізацію потужностей двигунів гелікоптера за рахунок симетричної різноспрямованої корекції для обох ГТД заданих значень частот обертання вільних турбін, та за відмови інформаційного обміну для синхронізації використовують відхилення обертового моменту від номінального значення, а роботу сусіднього двигуна детектують із використанням математичної моделі, крім того додатково виконують контроль відмов елементів САУ та за умови відмови вимірювальних каналів використовують значення параметрів, що отриманні від другого каналу управління САУ без передачі йому управління, а за умови відновлення роботоздатності вимірювального каналу використовують вимірювані ним значення параметрів, за умови відновлення роботоздатності каналу управління витратою палива (тільки за умови алгоритмічного виявлення відмови) його використовують у разі відмови каналу управління витратою палива в іншому каналі управління САУ. Суть корисної моделі пояснює креслення, де наведено схему регулятора, який реалізує спосіб, що заявляється. Регулятор містить корегуючі ланки 1…6 зведення відхилень параметрів роботи ГТД від заданих значень до одного рівня, блок селекції максимального відхилення 7, блок регулювання основних параметрів 8 та витрат палива 9. 2 UA 79857 U 5 10 15 20 25 30 35 40 45 50 55 Далі ланки 1…6 виконують зведення параметрів задля компенсування відмінностей щодо статичних та динамічних властивостей параметрів відповідно до математичної моделі двигуна. За умов обмеження регулюючого впливу або зміни режиму роботи виконують перерахунок інтегруючої складової задля узгодження із фактичною величиною управляючого впливу. До того ж ланка для зведення прискорення ротора газогенератора додатково враховує більший на одиницю порядок похідної в диференційному рівнянні для запобігання виникненню швидкісної помилки. Далі вибирають максимальне (інверсна реалізація селектора мінімуму) значення зведених відхилень, яке надходить до регулятора основних параметрів роботи двигуна разом із обмеженнями щодо управляючого впливу (мінімальне та максимальне значення витрат палива). Додатково передбачено примусове увімкнення із гістерезисом регулятора прискорення: у разі перевищення встановлених значень відхилень параметрів роботи ГТД (умова увімкнення), таких, як частоти обертання ротора турбокомпресора та вільної турбіни, температура газів за вільною турбіною, примусово вмикають регулятор прийманості, що виконує регулювання витрат палива за програмою прискорення до зменшення відхилення одного з перелічених параметрів нижче встановленого рівня (умова вимкнення). Це працює подібно до kick down в автомобілях: в умовах малих відхилень виконують повільне регулювання, наприклад, частоти обертання вільної турбіни, а за умов значного зниження значень параметрів виконують прийманість. здм Регулятор основних параметрів формує задане значення витрат палива Gп , яке далі підтримується регулятором витрат палива (положення виконавчого елементу паливного дозатору) шляхом видачі управляючого струму ІGп . Регулятор основних параметрів - ПІДрегулятор із обмеженнями щодо рівня та динаміки внутрішніх змінних та управляючого впливу. Синхронізацію потужностей виконують окремим контуром, що використовує симетричний алгоритм синхронізації, котрий реалізується однаково для обох двигунів. Це запобігає відхиленню результуючого значення частоти обертання вільної турбіни від заданого значення у процесі синхронізації потужностей. Синхронізація виконується наступним чином. В САУ обох двигунів розраховують різницю між обертовими моментами на валах вільних турбін двигунів. Далі задане значення частоти обертання вільної турбіни симетрично корегують в САУ обох двигунів відповідно до цих різниць моментів. Використання симетричного алгоритму мінімізує відхилення частоти обертання вільних турбін у процесі синхронізації, а присутність інтегруючої складової у регуляторах виключає наявність помилки етатизму щодо синхронізації потужностей. У разі відмови каналу інформаційного обміну між САУ сусідніх двигунів замість значення обертового моменту сусіднього двигуна використовують його номінальне значення. Завдяки цьому рішенню контур синхронізації потужностей не втрачає роботоздатності навіть у разі відмови інформаційного обміну та супроводжується лише незначним відхиленням результуючого значення частоти обертання вільної турбіни від заданого значення, що є прийнятним, враховуючи нехтовно малу вірогідність відмови каналу обміну. У разі відмови вимірювальних каналів САУ виконують заміну значень відповідних параметрів такими, що отримані з іншого каналу управління, без передачі управління до іншого каналу управління. Лише у разі відмови вимірювання відповідного параметра у обох каналах управління формують ознаку відмови та виконують перехід на резервний канал управління. До того ж відсутні тригери відмови параметрів, тобто у разі відновлення працездатності вимірювального каналу його використання подовжують. Це дозволяє на порядок підвищити відмовостійкість електронного блока управління. Ознаки корисної моделі: використання єдиного регулятора для регулювання параметрів роботи ГТД із корегувальними ланками для узгодження статичних та динамічних характеристик параметрів у відповідності до математичної моделі двигуна та із інверсним селектором мінімуму; компенсація швидкісної помилки регулювання прискорення ротора турбокомпресора; примусове увімкнення регулятора прийманості за умови значних відхилень параметрів роботи ГТД та повільне регулювання за умови малих відхилень (подібно до kick down в автомобілях); симетрична імплементація алгоритму синхронізації в САУ обох двигунів, що передбачає корекцію заданого значення частоти обертання вільної турбіни nBT ЗДН М nBT ЗДН (МОБСУС МОБ ) К СИНХР ; використання номінального значення обертового моменту замість значення обертового моменту сусіднього двигуна у разі відмови інформаційного каналу між блоками регуляторів 3 UA 79857 U 5 10 15 20 nBT ЗДН М nBT ЗДН (МОБНОМ МОБ ) К СИНХР ; детектування роботи сусіднього двигуна за допомогою математичної моделі у разі відмови інформаційного каналу між блоками регуляторів; використання вимірювальних параметрів сусіднього каналу управління у разі відмови власного; використання значень вимірювальних параметрів у разі відновлення роботоздатності вимірювального каналу; можливість повернення управління до першого каналу у разі відмови другого, якщо перший канал відновив можливість управління витратою палива. Це стосується випадків алгоритмічного визначення відмови та спрямовано на зниження вірогідності помилкового визначення відмови. nгг - частота обертання ротора газогенератора, об./хв; nв т - частота обертання вільної турбіни, об./хв; Моб - обертовий момент, Нм; Тг - температура газів за вільною турбіною, °C; n'гг - прискорення ротора газогенератора, об./хв/сек.; Т' г - градієнт підвищення температури газів за вільною турбіною, °C/сек.; ЗНД - задане (граничне) значення параметра, що регулюється або обмежується; Gп - витрати палива, кг/год.; ІGп - управляючий струм, А. Спосіб реалізується наступним чином: Розраховують відхилення параметрів роботи ГТД від заданих значень. Корисна модель здійснюється у складі дво- або однодвигунової силової установки гелікоптера на всіх режимах роботи ГТД (за виключенням синхронізації потужностей). Спосіб втілено в електронному блоці РДЦ-450М двигуна АИ-450М (Ми-2М, Ми-2МСБ2) 25 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 45 50 Спосіб керування дводвигуновою силовою установкою гелікоптера, який полягає в обчислюванні відхилень параметрів роботи газотрубного двигуна (ГТД), що регулюють, від заданих значень, виборі максимального значення відхилення в селекторі мінімуму, формуванні заданого значення витрат палива згідно із вибраним відхиленням та підтриманням заданих витрат палива, який відрізняється тим, що обчислювання відхилень параметрів роботи ГТД, що регулюють, виконують із використанням загального регулятора, а вибір параметра, що регулюють, виконують за допомогою інверсного селектора мінімуму, причому значення відхилень параметрів роботи ГТД від заданих значень корегують для компенсації відмінностей статичних та динамічних властивостей параметрів згідно із математичною моделлю двигуна із додатковим урахуванням наявності в каналі регулювання прискорення більшої на порядок похідної у диференційному рівнянні, та за значних відхилень параметрів роботи ГТД від заданих значень із гістерезисом примусово вмикають регулятор прискорення, а за малих відхилень виконують повільне регулювання параметрів роботи двигуна, крім того додатково здійснюють синхронізацію потужностей двигунів гелікоптера за рахунок симетричної різноспрямованої корекції для обох ГТД заданих значень частот обертання вільних турбін, та за відмови інформаційного обміну для синхронізації використовують відхилення обертового моменту від номінального значення, а роботу сусіднього двигуна детектують із використанням математичної моделі, крім того додатково виконують контроль відмов елементів системи автоматичного управління САУ та за умови відмови вимірювальних каналів використовують значення параметрів, що отримані від другого каналу управління САУ без передачі йому управління, а за умови відновлення роботоздатності вимірювального каналу використовують вимірювані ним значення параметрів, за умови відновлення роботоздатності каналу управління витратою палива (тільки за умови алгоритмічного виявлення відмови) його використовують у разі відмови каналу управління витратою палива в іншому каналі управління САУ. 4 UA 79857 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of two-engine power system of helicopter
Автори англійськоюVolkov Dmytro Ivanovych, Danylov Vsevolod Volodymyrovych, Ranchenko Hennadii Stepanovych
Назва патенту російськоюСпособ управления двухдвигательной силовой установкой вертолета
Автори російськоюВолков Дмитрий Иванович, Данилов Всеволод Владимирович, Ранченко Геннадий Степанович
МПК / Мітки
МПК: F02C 9/00
Мітки: дводвигуновою, керування, установкою, спосіб, гелікоптера, силовою
Код посилання
<a href="https://ua.patents.su/7-79857-sposib-keruvannya-dvodvigunovoyu-silovoyu-ustanovkoyu-gelikoptera.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування дводвигуновою силовою установкою гелікоптера</a>
Автобус з силовою установкою на газоподібному паливі
Номер патенту: 71654
Опубліковано: 25.07.2012
Автори: Підгайний Юрій Орестович, Лозинський Орест Миколайович, Горбач Валерій Олександрович, Чуркін Ігор Анатолійович
МПК: B60K 15/00
Мітки: паливі, установкою, газоподібному, силовою, автобус
Формула / Реферат:
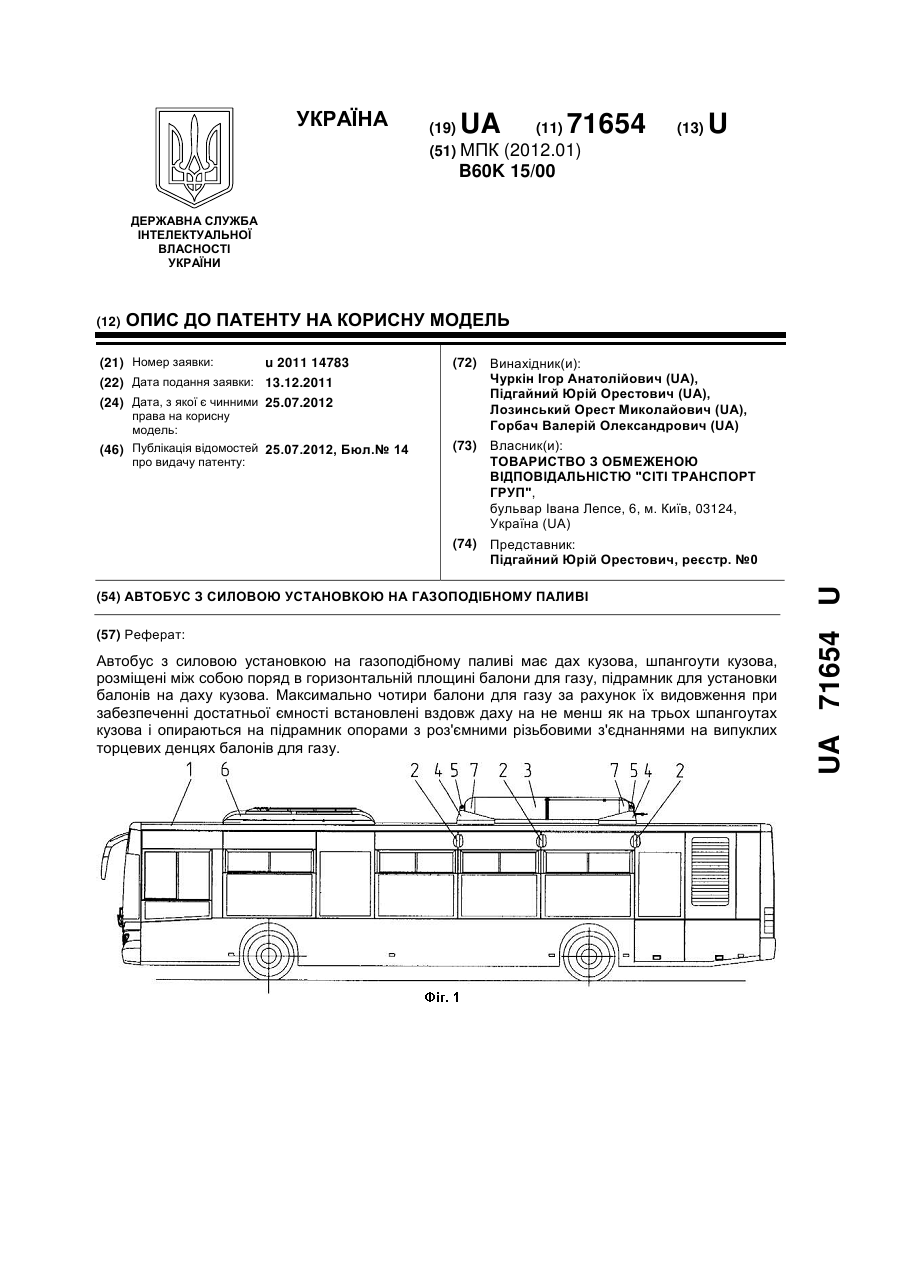
1. Автобус з силовою установкою на газоподібному паливі, що має дах кузова, шпангоути кузова, розміщені між собою поряд в горизонтальній площині балони для газу, підрамник для установки балонів на даху кузова, який відрізняється тим, що максимально чотири балони для газу за рахунок їх видовження при забезпеченні достатньої ємності встановлені вздовж даху на не менш як на трьох шпангоутах кузова і опираються на підрамник опорами з роз'ємними...
Пристрій керування насосною установкою
Номер патенту: 28955
Опубліковано: 25.12.2007
Автори: Мошноріз Микола Миколайович, Грабко Володимир Віталійович
МПК: F04D 15/00
Мітки: насосною, керування, установкою, пристрій
Формула / Реферат:
Пристрій керування насосною установкою, що містить асинхронний двигун, відцентровий насос, перетворювач для живлення силового кола двигуна, два суматори, обчислювальний блок, блок задання конструктивних і енергетичних параметрів відцентрового насоса та параметрів мережі споживача, причому вхід перетворювача для живлення силового кола двигуна з’єднаний з трифазною мережею живлення, вал асинхронного двигуна підключений до вала робочого колеса...
Система керування двигуновою установкою літального апарата
Номер патенту: 61817
Опубліковано: 17.11.2003
Автори: Кулік Анатолій Степанович, Лазоркін Юрій Юрійович, Цехмейстер Олена Олексіївна, Дигало Оксана Миколаївна, Бандура Іван Миколайович
МПК: B64D 31/00
Мітки: керування, апарата, літального, система, установкою, двигуновою
Формула / Реферат:
Система керування двигуновою установкою літального апарата, що містить датчик частоти обертання ротора двигуна, електричний привід паливного агрегату, з'єднаний з паливним агрегатом, яка відрізняється тим, що в неї введені датчик тиску повітря за компресором, послідовно з'єднаний з блоком регулювань точності датчика тиску, датчик температури повітря за вентилятором, послідовно з'єднаний із блоком регулювань точності датчика температури, блок...
Енергоефективний спосіб керування відцентровою насосною установкою системи водопостачання
Номер патенту: 31195
Опубліковано: 25.03.2008
Автори: Кіселичник Олег Іванович, Попович Микола Гаврилович
МПК: F04D 15/00
Мітки: керування, енергоефективний, спосіб, установкою, системі, насосною, водопостачання, відцентровою
Формула / Реферат:
Енергоефективний спосіб керування відцентровою насосною установкою системи водопостачання, при якому для регулювання подачі насоса змінюють частоту та амплітуду напруги живлення статорної обмотки його привідного асинхронного двигуна, величину необхідної частоти та амплітуди визначають на основі оцінки водоспоживання в режимі реального часу, який відрізняється тим, що на основі часу перехідних процесів в системі водопостачання вибирають період...
Спосіб керування ректифікаційною установкою
Номер патенту: 83411
Опубліковано: 10.07.2008
Автор: Савінов Міхаіл Юрьєвіч
МПК: B01D 53/00, F25J 3/02
Мітки: ректифікаційною, установкою, спосіб, керування
Формула / Реферат:
Спосіб керування ректифікаційною установкою для переробляння стиснутих сумішей, який включає регулювання витрати первинної суміші в установку і живлення ректифікаційних колон, обладнаних конденсаторами-випаровувачами з проміжним теплоносієм у замкнутій порожнині і в концентраційній частині яких виконують випереджальні аналізи, також виконують регулювання тисків і кількості верхнього і нижнього продуктів, що виводять із колон, який...
Попередній патент: Вигладжувач для обробки поверхонь
Наступний патент: Спосіб проведення реакції нейтралізації для діагностики грипу коней
Випадковий патент: Система обігріву