Спосіб та система для стеження за ціллю
Формула / Реферат
1. Спосіб стеження за ціллю (2), яка рухається у повітряному просторі, згідно з яким пошук у просторі ведуть за допомогою станції виявлення (12) за багато проходів на першій тактовій частоті (2π /ΔΤ1) й одержують таким чином інформацію, що описує маршрут (4), яким пролетіла ціль (2), очікуваний подальший маршрут (6) польоту екстраполюють за допомогою лічильно-обчислювального засобу (16) на підставі інформації про ціль, одержаної принаймні за два проходи, і дані про маршрут польоту, які описують очікуваний маршрут польоту (8), надають станції стеження (14), яка покриває сектор (15) стеження, дані про маршрут польоту, які описують екстрапольований очікуваний маршрут польоту (8), передають на станцію стеження (14) за допомогою засобу передачі (18) на другій тактовій частоті (2π /ΔΤ2), яка вища за першу тактову частоту (2π /ΔΤ1), а коли ціль (2) досягає сектора (15) стеження, станцію стеження (14) націлюють на очікуваний маршрут польоту (6) за допомогою прицільного засобу на підставі переданих даних про маршрут польоту незалежно від її здатності самій виявити ціль, а ціль (2) виявляють за допомогою засобу виявлення, як тільки станція стеження (14) набуває здатності виявити її, при цьому станція стеження (14) відслідковує ціль у автономному режимі за допомогою засобів слідкування.
2. Спосіб за п. 1, який відрізняється тим, що станція виявлення (12) та станція стеження (14) мають різні характеристики пошуку.
3. Спосіб за пп. 1, 2, який відрізняється тим, що станцію стеження (14) територіально віддаляють від станції виявлення (12) на відоме положення відносно станції стеження (12), при цьому розрахунок даних про маршрут польоту виконують з урахуванням положення станції стеження (14) відносно станції виявлення (12).
4. Спосіб за пп. 1-3, який відрізняється тим, що дані, принаймні частково, обробляють за допомогою лічильно-обчислювального блока (16.1), доданого до станції виявлення (12), або лічильно-обчислювального блока (16.2) лічильно-обчислювального засобу (16), доданого до станції стеження (14).
5. Спосіб за пп. 1-4, який відрізняється тим, що положення станції стеження (14) відносно станції виявлення (12) визначають за допомогою засобів пошуку, доданих до станції виявлення (12) та/або станції стеження (14).
6. Спосіб за пп. 1-5, який відрізняється тим, що дані про маршрут польоту для наступної станції стеження (114) розраховують за допомогою лічильно-обчислювального засобу (16)
і передають ці дані до наступної станції стеження (114) за допомогою засобу передачі.
7. Спосіб за пп. 1-6, який відрізняється тим, що дані про маршрут польоту або дані, що базуються на даних про маршрут польоту, передають до допоміжної системи (30, 31, 130, 131) за допомогою засобів зв'язку (28, 128).
8. Спосіб за пп. 1-7, який відрізняється тим, що пошук другої цілі (102) у просторі проводять за допомогою станції виявлення (12) і таким чином одержують інформацію про другу ціль, яка описує другий маршрут (104), яким пролетіла друга ціль, а дані про очікуваний подальший маршрут польоту (106) для використання принаймні однією станцією стеження (114) та принаймні однією допоміжною системою (130, 131) одержують за допомогою лічильно-обчислювального засобу (16).
9. Спосіб за пп. 1-8, який відрізняється тим, що фільтр станції стеження (14) налагоджують з урахуванням даних про маршрут польоту.
10. Спосіб за пп. 1-9, який відрізняється тим, що дані про маршрут польоту розраховують, беручи до уваги затримки у часі, спричинені системою.
11. Система (10) стеження за ціллю (2), що рухається у повітряному просторі, яка містить станцію виявлення (12), призначену для пошуку в просторі пошуку за багато проходів на першій тактовій частоті (2π/ΔΤ1), станцію стеження (14), призначену для відслідковування цілі (2) у секторі стеження (15), причому станція виявлення (12) містить перший засіб виявлення, призначений для одержання інформації про ціль, яка описує маршрут (4), що його пройшла ціль принаймні за кілька проходів, а система (10) стеження за ціллю містить лічильно-обчислювальний засіб (16, 16.1, 16.2), призначений для екстраполяції очікуваного маршруту польоту (6) цілі (2) та розрахунку даних про маршрут польоту, які описують очікуваний маршрут польоту (6) на підставі інформації про ціль, засіб передачі (18), призначений для передачі принаймні частини даних з інформацією про ціль до лічильно-обчислювального засобу (16, 16.1, 16.2) та принаймні даних про маршрут польоту з описом екстрапольованого маршруту польоту до станції стеження (14) з метою надання даних про маршрут польоту станції стеження (14) на другій тактовій частоті (2π /ΔΤ2), яка вища за першу тактову частоту (2π /ΔΤ1), при цьому станція стеження (14) містить засіб націлювання, призначений для націлювання станції стеження (12) на очікуваний маршрут польоту (6) на підставі наданих даних про маршрут польоту незалежно від здатності виявлення цілі (2), другий засіб націлювання, призначений для виявлення цілі (2), як тільки вона ввійде в сектор стеження (15) і стане здатною до виявлення, і засіб слідкування, призначений для відслідковування виявленої цілі (2) в автономному режимі після її виявлення засобами виявлення.
12. Система (10) стеження за ціллю за п. 11, яка відрізняється тим, що станція виявлення (12) та станція стеження (14) мають різні характеристики пошуку.
13. Система (10) стеження за ціллю за пп. 11, 12, яка відрізняється тим, що характеристика пошуку станції виявлення (12) має більшу дальність, ніж у станції стеження (14).
14. Система (10) стеження за ціллю за пп. 11-13, яка відрізняється тим, що сектор пошуку станції виявлення (12) ширший за сектор стеження (15) станції стеження (14).
15. Система (10) стеження за ціллю за пп. 11-14, яка відрізняється тим, що станція виявлення (12) має кілька пошукових блоків.
16. Система (10) стеження за ціллю за пп. 11-15, яка відрізняється тим, що станція виявлення (12) має принаймні один радіолокатор.
17. Система (10) стеження за ціллю за пп. 11-16, яка відрізняється тим, що засіб виявлення станції виявлення (12) призначений для визначення маршруту цілі (2) у просторі на підставі інформації про ціль.
18. Система (10) стеження за ціллю за пп. 11-17, яка відрізняється тим, що станція стеження (14) має інфрачервоний датчик, переважно інфрачервоний прилад переднього огляду.
19. Система (10) стеження за ціллю за пп. 11-18, яка відрізняється тим, що станція стеження (14) виконана таким чином, що здатна автоматично націлюватися на очікуваний маршрут польоту (6) незалежно від автоматичного виявлення цілі (2).
20. Система (10) стеження за ціллю за пп. 11-19, яка відрізняється тим, що засіб слідкування станції стеження (14) призначений для ручного та/або автоматичного слідкування станцією стеження (14).
21. Система (10) стеження за ціллю за пп. 11-20, яка відрізняється тим, що станція стеження (14) є рухомою.
22. Система (10) стеження за ціллю за пп. 11-21, яка відрізняється тим, що станція стеження (14) територіально віддалена від станції виявлення (12) і знаходиться у відомому відносному положенні щодо станції виявлення (12), а лічильно-обчислювальний засіб (16) призначений для розрахунку даних про маршрут польоту з урахуванням цього відносного положення.
23. Система (10) стеження за ціллю за пп. 11-22, яка відрізняється тим, що станція виявлення (12) та/або станція стеження (14) мають пошукові засоби для встановлення відносного положення станції стеження (14) щодо станції виявлення (12).
24. Система (10) стеження за ціллю за пп. 11-23, яка відрізняється тим, що принаймні частина лічильно-обчислювального засобу (16) утворює лічильно-обчислювальний блок (16.1, 16.2), доданий до станції виявлення (12) або станції стеження (14).
25. Система (10) стеження за ціллю за пп. 11-24, яка відрізняється тим, що лічильно-обчислювальний засіб (16) призначений для розрахунку наступних даних про маршрут польоту принаймні для однієї наступної станції стеження (114), а засіб передачі служить для передачі наступних даних про маршрут польоту до наступної станції стеження (114).
26. Система (10) стеження за ціллю за пп. 11-25, яка відрізняється тим, що станція стеження (14, 114) містить засіб зв'язку (28, 128), що забезпечує передачу даних про маршрут польоту до принаймні однієї допоміжної системи (30, 31; 130, 131), причому відносне положення принаймні однієї допоміжної системи (30, 31; 130,131) щодо станції виявлення (12) або станції стеження (14,114) є відомим, а лічильно-обчислювальний засіб (16) призначений для розрахунку даних про маршрут польоту для аналізу принаймні однією допоміжною системою (30, 31; 130,131).
27. Система (10) стеження за ціллю за п. 26, яка відрізняється тим, що допоміжна система (30, 31; 130, 131) має принаймні один рухомий носій зброї, наприклад гармату або пускову ракетну установку.
28. Система (10) стеження за ціллю за пп. 11-27, яка відрізняється тим, що станція виявлення (12) призначена для пошуку в своєму просторі другої цілі (102) та одержання інформації про другу ціль.
29. Система (10) стеження за ціллю за пп. 11-28, яка відрізняється тим, що станція стеження (14) містить фільтр, який може бути налагоджений для урахування даних про маршрут польоту.
30. Система (10) стеження за ціллю за пп. 11-29, яка відрізняється тим, що лічильно-обчислювальний засіб (16) призначений для врахування затримок у часі, спричинених системою при розрахунку даних про маршрут польоту, з метою компенсації затримок у часі протягом відслідковування станцією стеження (14).
Текст
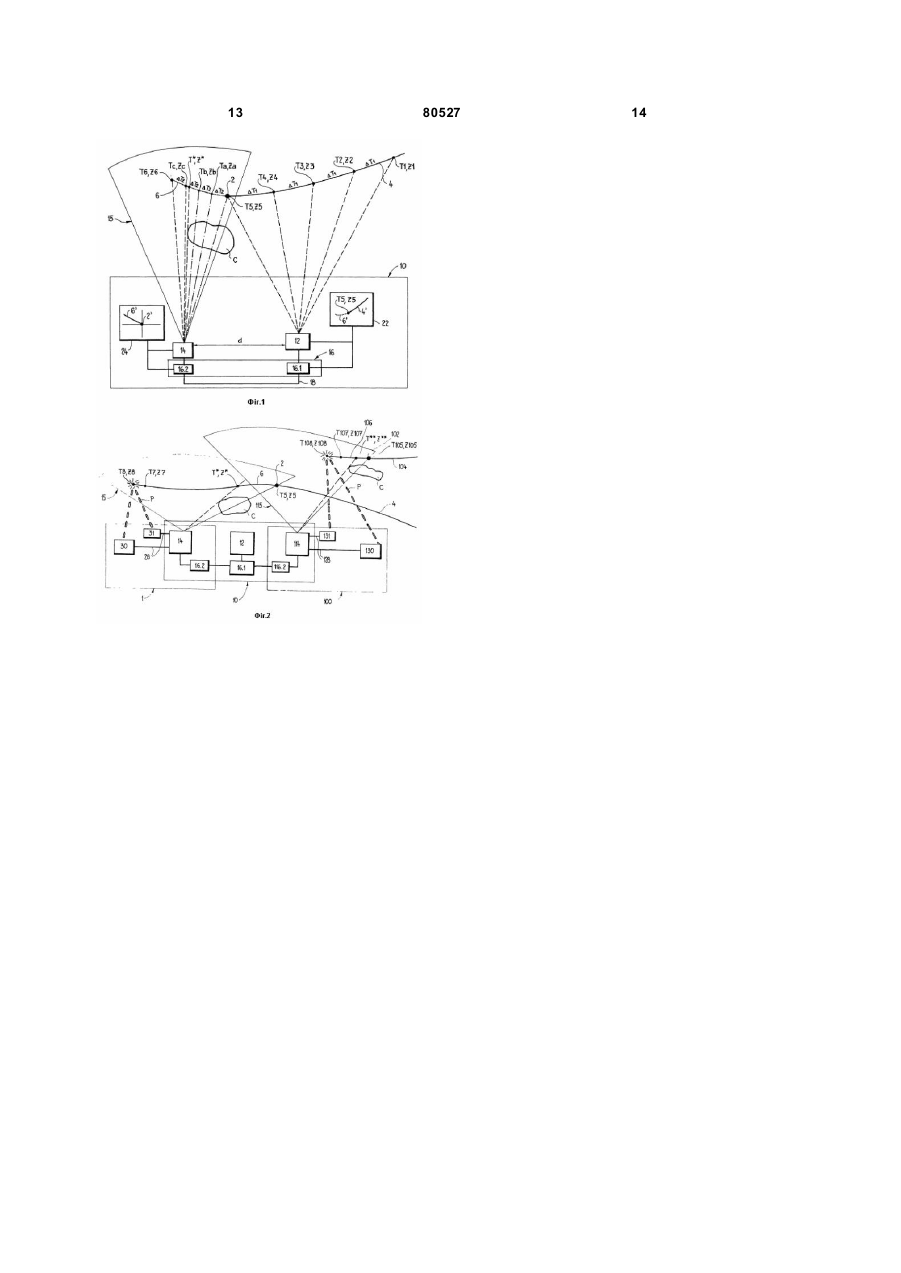
1. Спосіб стеження за ціллю (2), яка рухається у повітряному просторі, згідно з яким пошук у просторі ведуть за допомогою станції виявлення (12) за багато проходів на першій тактовій частоті (2π /ΔΤ1) й одержують таким чином інформацію, що описує маршрут (4), яким пролетіла ціль (2), очікуваний подальший маршрут (6) польоту екстраполюють за допомогою лічильнообчислювального засобу (16) на підставі інформації про ціль, одержаної принаймні за два проходи, і дані про маршрут польоту, які описують очікуваний маршрут польоту (8), надають станції стеження (14), яка покриває сектор (15) стеження, дані про маршрут польоту, які описують екстрапольований очікуваний маршрут польоту (8), передають на станцію стеження (14) за допомогою засобу передачі (18) на другій тактовій частоті (2π /ΔΤ2), яка вища за першу тактову частоту (2π /ΔΤ1), а коли ціль (2) досягає сектора (15) стеження, станцію стеження (14) націлюють на очікуваний маршрут польоту (6) за допомогою прицільного засобу на підставі переданих даних про маршрут польоту незалежно від її здатності самій виявити ціль, а ціль (2) виявляють за допомогою засобу виявлення, як тільки станція стеження (14) набуває здатності виявити її, при цьому станція стеження (14) відслідковує ціль у автономному режимі за допомогою засобів слідкування. 2. Спосіб за п. 1, який відрізняється тим, що станція виявлення (12) та станція стеження (14) мають різні характеристики пошуку. 2 (19) 1 3 80527 станцію виявлення (12), призначену для пошуку в просторі пошуку за багато проходів на першій тактовій частоті (2π/ΔΤ1), станцію стеження (14), призначену для відслідковування цілі (2) у секторі стеження (15), причому станція виявлення (12) містить перший засіб виявлення, призначений для одержання інформації про ціль, яка описує маршрут (4), що його пройшла ціль принаймні за кілька проходів, а система (10) стеження за ціллю містить лічильно-обчислювальний засіб (16, 16.1, 16.2), призначений для екстраполяції очікуваного маршруту польоту (6) цілі (2) та розрахунку даних про маршрут польоту, які описують очікуваний маршрут польоту (6) на підставі інформації про ціль, засіб передачі (18), призначений для передачі принаймні частини даних з інформацією про ціль до лічильно-обчислювального засобу (16, 16.1, 16.2) та принаймні даних про маршрут польоту з описом екстрапольованого маршруту польоту до станції стеження (14) з метою надання даних про маршрут польоту станції стеження (14) на другій тактовій частоті (2π /ΔΤ2), яка вища за першу тактову часто ту (2π /ΔΤ1), при цьому станція стеження (14) містить засіб націлювання, призначений для націлювання станції стеження (12) на очікуваний маршрут польоту (6) на підставі наданих даних про маршрут польоту незалежно від здатності виявлення цілі (2), другий засіб націлювання, призначений для виявлення цілі (2), як тільки вона ввійде в сектор стеження (15) і стане здатною до виявлення, і засіб слідкування, призначений для відслідковування виявленої цілі (2) в автономному режимі після її виявлення засобами виявлення. 12. Система (10) стеження за ціллю за п. 11, яка відрізняється тим, що станція виявлення (12) та станція стеження (14) мають різні характеристики пошуку. 13. Система (10) стеження за ціллю за пп. 11, 12, яка відрізняється тим, що характеристика пошуку станції виявлення (12) має більшу дальність, ніж у станції стеження (14). 14. Система (10) стеження за ціллю за пп. 11-13, яка відрізняється тим, що сектор пошуку станції виявлення (12) ширший за сектор стеження (15) станції стеження (14). 15. Система (10) стеження за ціллю за пп. 11-14, яка відрізняється тим, що станція виявлення (12) має кілька пошукових блоків. 16. Система (10) стеження за ціллю за пп. 11-15, яка відрізняється тим, що станція виявлення (12) має принаймні один радіолокатор. 17. Система (10) стеження за ціллю за пп. 11-16, яка відрізняється тим, що засіб виявлення станції виявлення (12) призначений для визначення маршруту цілі (2) у просторі на підставі інформації про ціль. 18. Система (10) стеження за ціллю за пп. 11-17, яка відрізняється тим, що станція стеження (14) має інфрачервоний датчик, переважно інфрачервоний прилад переднього огляду. 19. Система (10) стеження за ціллю за пп. 11-18, яка відрізняється тим, що станція стеження (14) виконана таким чином, що здатна автоматично 4 націлюватися на очікуваний маршрут польоту (6) незалежно від автоматичного виявлення цілі (2). 20. Система (10) стеження за ціллю за пп. 11-19, яка відрізняється тим, що засіб слідкування станції стеження (14) призначений для ручного та/або автоматичного слідкування станцією стеження (14). 21. Система (10) стеження за ціллю за пп. 11-20, яка відрізняється тим, що станція стеження (14) є рухомою. 22. Система (10) стеження за ціллю за пп. 11-21, яка відрізняється тим, що станція стеження (14) територіально віддалена від станції виявлення (12) і знаходиться у відомому відносному положенні щодо станції виявлення (12), а лічильно-обчислювальний засіб (16) призначений для розрахунку даних про маршрут польоту з урахуванням цього відносного положення. 23. Система (10) стеження за ціллю за пп. 11-22, яка відрізняється тим, що станція виявлення (12) та/або станція стеження (14) мають пошукові засоби для встановлення відносного положення станції стеження (14) щодо станції виявлення (12). 24. Система (10) стеження за ціллю за пп. 11-23, яка відрізняється тим, що принаймні частина лічильно-обчислювального засобу (16) утворює лічильно-обчислювальний блок (16.1, 16.2), доданий до станції виявлення (12) або станції стеження (14). 25. Система (10) стеження за ціллю за пп. 11-24, яка відрізняється тим, що лічильнообчислювальний засіб (16) призначений для розрахунку наступних даних про маршрут польоту принаймні для однієї наступної станції стеження (114), а засіб передачі служить для передачі наступних даних про маршрут польоту до наступної станції стеження (114). 26. Система (10) стеження за ціллю за пп. 11-25, яка відрізняється тим, що станція стеження (14, 114) містить засіб зв'язку (28, 128), що забезпечує передачу даних про маршрут польоту до принаймні однієї допоміжної системи (30, 31; 130, 131), причому відносне положення принаймні однієї допоміжної системи (30, 31; 130,131) щодо станції виявлення (12) або станції стеження (14,114) є відомим, а лічильно-обчислювальний засіб (16) призначений для розрахунку даних про маршрут польоту для аналізу принаймні однією допоміжною системою (30, 31; 130,131). 27. Система (10) стеження за ціллю за п. 26, яка відрізняється тим, що допоміжна система (30, 31; 130, 131) має принаймні один рухомий носій зброї, наприклад гармату або пускову ракетну установку. 28. Система (10) стеження за ціллю за пп. 11-27, яка відрізняється тим, що станція виявлення (12) призначена для пошуку в своєму просторі другої цілі (102) та одержання інформації про другу ціль. 29. Система (10) стеження за ціллю за пп. 11-28, яка відрізняється тим, що станція стеження (14) містить фільтр, який може бути налагоджений для урахування даних про маршрут польоту. 30. Система (10) стеження за ціллю за пп. 11-29, яка відрізняється тим, що лічильнообчислювальний засіб (16) призначений для врахування затримок у часі, спричинених 5 80527 6 системою при розрахунку даних про маршрут польоту, з метою компенсації затримок у часі протягом відслідковування станцією стеження (14). Цей винахід стосується способу стеження за ціллю за п. 1 та системи для стеження за ціллю за п. 11. Цей винахід, зокрема, але не виключно, може застосовуватися для стеження за цілями, які летять і що їх належить збивати. Звичайно для цього використовуються станція виявлення та станція стеження. Станція виявлення, яка покриває простір пошуку, спеціально призначена для пошуку в цьому просторі цілі, що знаходиться у ньому, та визначення таким шляхом інформації про ціль, яка містить принаймні дані про рух цілі та/або її маршрут у минулому. Ін формація містить також інші дані про ціль, зокрема, тип цілі. У цілому доцільно виконувати станцію виявлення так, щоб вона охоплювала великі відстані та велику кутову зону, тобто могла провадити широкий пошук і була здатна надавати докладні дані про ціль. Станції виявлення звичайно працюють на відносно низьких тактових часто тах. Потім екстраполюють маршрут польоту на підставі даних, одержаних станцією виявлення, й будують очікуваний майбутній рух цілі. Ці дані в першу чергу слугують для грубого настроювання станції стеження. Станція стеження часто побудована так, що охоплює більш вузький сектор, ніж станція виявлення. Одержавши ціль від станції виявлення, станція стеження на початку своєї роботи має знову шукати ціль, перш ніж знайде її, настроїться й слідкуватиме за нею. Головним недоліком цього поширеного способу є те, що станція стеження не може захопити ціль без утр уднень. Особливо великі ці утруднення, якщо станція стеження має гірше розрізнення, та/або значно менше поле обзору, та/або меншу дальність, ніж станція виявлення. Ще один недолік полягає в тому, що тактова частота пошуку станції виявлення, що принаймні частково визначає послідовність її роботи й використовується для надання даних про повітряну ціль до станції стеження, відносно низька, а збільшити її без неприйнятних витрат неможливо. З [патенту США 537967 Е41G3/02, пул. 10.01.199р.] відомі спосіб та система для управління вогнем зброї ручного наведення. У цьому випадку система складається з радіолокатора та оптоелектронної системи розпізнавання у вигляді інфрачервоної камери переднього обзору. Ці спосіб та система надто складні, а досягнуті результати не є задовільні. Отже, завдання цього винаходу полягає в тому, щоб: - запропонувати удосконалений спосіб того типу, що наведено вище; запропонувати систему стеження за ціллю для здійснення цього способу, - уникаючи зазначених недоліків. Це завдання вирішується згідно з цим винаходом - для способу ознаками п. 1; - для системи слідкування за ціллю ознаками п.11. Переважні варіанти здійснення винаходу наведені у залежних пп.2-10 та 12-30 відповідно. Запропонований спосіб здійснюється таким чином: Захищуваний простір озирають на першій тактовій частоті та/або пошуковій тактовій частоті за множину проходів пошуку. При цьому тактова частота пошуку не обов'язково має бути постійною. Станція виявлення визначає послідовність зображень від кожного куту обзору, а часовий інтервал між зображеннями у послідовності визначається першою тактовою частотою та/або тактовою частотою пошуку. Під зображеннями маються на увазі також і цифрові зображення. Для обертових радарів перша тактова частота та/або тактова частота пошуку звичайно відповідають кількості обертів пошукового радара за одиницю часу. Інформація про ціль містить дані, частково інтерпольовані, про маршрут, яким вона вже пролетіла. Ця інформація може містити також інші дані про ціль, наприклад, про її тип або про результати опитування "свійчужий", за якими виявлені цілі класифікують як такі, що підлягають знищенню, тобто справжні бойові цілі, або як свої літальні апарати. Одержавши інформацію про ціль за множину проходів пошуку, але, можливо, використовуючи лише інформацію про ворожі цілі, можна екстраполювати очікуваний маршрут польоту та/або дані про маршрут польоту. Замість прямого захоплення цілі, як у відомому способі, пошуку цілі ще раз з самого початку та її автономного супроводження, за запропонованим способом станція стеження веде супровід цілі не в автономному режимі, а під зовнішнім керуванням. Зовнішнє керування здійснюють на підставі даних про маршрут польоту, що надходять до станції стеження на другій тактовій частоті, яка вище за першу тактову частоту та/або пошукову частоту. На перехідному етапі керована ззовні станція стеження націлюється на очікуваний маршрут польоту, навіть якщо ціль знаходиться у контрольованому нею просторі, але не піддається виявленню станцією стеження. Як тільки з'являються умови для виявлення, станція стеження захоплює ціль, після чого перехідний етап та зовнішнє керування станцією стеження закінчуються. З цього моменту станція стеження є автономно наведена на ціль та/або автономно супроводжує її. На перехідному етапі станція стеження не відчуває ціль безпосередньо, але відстежує її "наосліп", принаймні приблизно з максимально можливою точністю, яка визначається, серед іншого, шляхом екстраполяції. Знову розшукува ти ціль, цього разу 7 80527 станцією стеження, більш не потрібно. У той момент, коли станція стеження дістає змогу безпосередньо відчувати ціль, вона вже є наведена на неї. На практиці обирають точку прицілювання, на яку наводиться станція стеження, околиці точки прицілювання демонструють на якомусь дисплеї (наприклад, на моніторі) у такій конфігурації, що точка прицілювання знаходиться у центрі екрана За запропонованим способом, коли ціль потрапляє до зони видимості станції стеження, вона з'являється у безпосередній близькості до точки прицілювання (або у межах коридору, що показується на екрані); якщо фактичний маршрут польоту збігається з екстрапольованим і не припустилися інших некомпенсованих помилок, ціль з'явиться точно поряд з точкою прицілювання. Для передачі усередині системи даних, використовуваних у зв'язку з запропонованим способом, передбачаються відповідні засоби передачі у системі слідкування за ціллю. На додаток треба зазначити, що конкретні дані, звичайно, оновлюються безперервно або з певною періодичністю так, щоб враховува ти найновішу інформацію, яка надходить. Завдяки винаходу досягаються наступні переваги: операторові станції стеження не потрібно ані виконувати пошук вручну, ані запускати автоматичний пошук, аж доки ціль не з'явиться на моніторі станції стеження; причини непояви цілі можуть бути такі: ціль ще не увійшла до сектору стеження та/або надто мала; ціль знаходяться у секторі стеження, але вид на неї затуляють або не дають її розрізнити атмосферні умови. Коли ціль нарешті досягає сектору стеження, станція стеження спрацьовує за допомогою зовнішнього керування так, ніби здатна виявити ціль, хоча насправді вона "сліпа"; станцію стеження також можна спрямувати на ціль та/або на гаданий маршрут її польоту ще до то го, як ціль увійде до сектору стеження. У будь-якому разі виявлення цілі гарантується, якщо вже станція виявлення викрила ціль. Навіть після тривалого стеження "наосліп" ціль, коли станція стеження нарешті захоплює її, можна швидко відстежувати і швидко вживати заходів протидії, в усякому разі, набагато швидше, ніж при відомому використанні даних про маршрут польоту, що надходять лише на низькій першій тактовій частоті та/або частоті пошуку. Для бездоганного та ефективного використання запропонованого способу не є обов'язковим, щоб станція виявлення та станція стеження мали однакові або пристосовані одна до одної параметри пошуку. Це має ту перевагу, що різні датчики від різних систем озброєння працюють разом, з'єднані в ефективну пошукову систему, що підвищує цінність кожного з датчиків у боротьбі з цілями супротивника. Це особливо корисно тому, що станції стеження часто входять до існуючих систем озброєння, ефективність яких можна підвищити за рахунок співпраці зі станціями виявлення. Зокрема, станція виявлення та станція стеження можуть мати різні дальності або 8 покривати неоднакові кутові простори, бо станція виявлення, як правило, посідає більшу дальність і здатна покривати більший кутовий простір. У певних випадках доцільно робити станцію виявлення з кількох пошукових блоків, що посідають різні здатності; ці блоки можуть, наприклад, відповідати за окремі сектори простору, які тим не менш легко перетинаються між собою, або за один сектор, але під різними кутами обзору та/або співвідношеннями виявлення - маються на увазі не лише різні умови у просторі між станцією та ціллю, а й різні властивості цілі, що призводить до різних результатів виявлення. Часто, наприклад, для виявлення цілей застосовують радіолокатор, а для стеження інфрачервоний датчик, переважно переднього обзору, або телекамеру, або оптичну лінію візування. Датчик стеження переважно виконується так, що здатний відслідковувати ціль абсолютно незалежно від спроможності самому виявляти її, навіть коли ціль ще не ввійшла до сектору, який може контролювати датчик стеження. Засіб стеження на станції стеження може використовува тися для ручного або автоматичного слідкування. Цінуються такі станції стеження, які можуть слідкувати як у р учному, так і в автоматичному режимі, так щоб у разі виходу з ладу автоматичної системи стеження станція продовжувала роботу. Запропонований спосіб особливо зручний у випадках, коли станція стеження територіально віддалена від станції виявлення, але, звичайно, її положення відносно станції виявлення є відоме. У цьому випадку відносне положення має включатися до розрахунку для досягнення більш точних результатів. Часто, але не обов'язково, станції виявлення стаціонарні, а станції стеження рухомі. Станції виявлення можуть входити до складу стаціонарних комплексів раннього попередження, тоді як станції стеження є елементами приладів керування вогнем або носіїв бойових систем, які часто-густо не стоять на місці. Станція виявлення та/або станція стеження можуть бути оснащені відповідними пошуковими засобами для встановлення відносного положення у даний момент. Окремі лічильно-обчислювальні блоки можуть становити засоби розрахунку, необхідні для здійснення способу. Такі лічильно-обчислювальні блоки можуть встановлюватися як на станції виявлення, так и на станції стеження. Як правило, і станція виявлення, і станція стеження, а часто й допоміжні системи, наприклад, носії зброї, мають спеціально виготовлені лічильно-обчислювальні блоки. У багатьох випадках система ППО має лише одну станцію виявлення, але кілька станцій стеження. Якщо наступна станція стеження знаходиться в іншому відносному положенні щодо станції виявлення, ніж перша, до неї потрібно надсилати модифіковані дані про маршрут польоту з урахуванням її іншого відносного положення. 9 80527 Дані про маршрут польоту або інші дані, необхідні для здійснення способу, можна надсилати до якоїсь допоміжної системи за допомогою засобів зв'язку. Допоміжною системою може бути, скажімо, носій зброї, наприклад, зенітної гармати або ракетної пускової установки. Цей носій теж може бути рухомим. Стволи гармат та/або відповідні сервопривода часто керуються від станцій стеження. Зброя вистрілює боєприпаси, які теж вважаються озброєнням, щоб вразити ціль, часто осколками. Через те дані мають враховувати відносне положення носія зброї щодо станції стеження, й обчислення для керування гарматою треба виконувати заздалегідь, враховуючи, зокрема, особливості польоту або балістику боєприпасів. В особливо вигідному варіанті здійснення винаходу станція виявлення може бути виконана таким чином, щоб видавати інформацію не про одну, а одразу про кілька цілей. Інформацію про різні цілі піддають аналізу на лічильнообчислювальному блоці, який має спеціальні засоби для цього, й надають до різних станцій стеження. Станції стеження звичайно мають фільтри, і перевагою цього винаходу є те, що такі фільтри можна заздалегідь налагоджувати на урахування даних про маршрут польоту. Запровадження нової системи стеження за цілями на практиці є неминучим, і при такому запровадженні виникнуть затримки у часі. Аби уникнути помилок, викликаних такими затримками, доцільно виконувати розрахунки, беручи до уваги такі затримки у часі, щоб компенсувати їх і забезпечити точніше стеження за ціллю. Подальші ознаки й переваги цього винаходу описуються далі на конкретних прикладах здійснення з посиланням на креслення, на яких: Фіг.1 - схема першої системи стеження за ціллю згідно з винаходом, яка також .ілюструє здійснення способу за винаходом; Фіг.2 - схема другої системи стеження за ціллю згідно з винаходом, до якої додані допоміжні системи. На Фіг.1 ціль 2, що рухається у повітряному просторі, показана у момент Т5 у точці Z5. Ціль 2 вже пролетіла маршрутом 4. На підставі екстраполяції, що базується на маршруті 4, очікується, що ціль 2 летітиме далі маршрутом 6, який показано пунктиром. Ціль 2 відслідковують за допомогою системи стеження 10 згідно з винаходом. Система стеження 10 містить станцію виявлення 12, станцію стеження 14, лічильно-обчислювальний засіб 16 та засіб передачі даних 18. Станція виявлення 12 охоплює великий сектор пошуку, межі якого не показано. Станція стеження 14 покриває сектор стеження 15. Станція виявлення 12 містить пошуковий радіолокатор, який у даному випадку обертається, і обшукує простір за багато проходів та/або обертів, які слідують один за одним з інтервалами ΔΤ1, не обов'язково постійними, що відповідають першій та/або пошуковій тактовій частоті 2П/ΔΤ1, також не обов'язково постійній. 10 Станція стеження 14 розташована територіально віддалік станції виявлення 12 на відстані d. Векторна відстань станції стеження 14 від станції стеження 12, а отже, відносне положення станції 14 щодо станції 12, є відомі. Станція виявлення 12 містить також засіб візуалізації 22, а станція стеження 12 - засіб візуалізації 24. Лічильно-обчислювальний засіб 16 містить перший лічильно-обчислювальний блок 16.1, призначений до станції виявлення 12, та другий блок стеження 16.2, призначений до станції стеження 14. Засіб передачі 18 призначений для передач даних усередині системи, зокрема, між станцією виявлення 12, лічильно-обчислювальними блоками 16.1, 16.2 лічильно-обчислювального засобу 16 та станцією стеження 14. Засіб передачі може складатися з дротових та/або бездротових пристроїв. Треба також зазначити, що пунктирні лінії між станцією виявлення 12 і маршрутом 4 та між станцією стеження 14 і маршрутом польоту 6 стосуються реального стеження за ціллю 2, тоді як штри х-пунктирні лінії між станцією стеження 14 та маршрутом польоту 6 стосуються налагодження керованої ззовні станції стеження 14 у перехідному режимі. У момент ТІ станція виявлення 12 помічає ціль 2 у точці Z1. Після того ціль 2 показується у точці Z2 у момент Т2, у точці Z3 у момент ТЗ та у точці Z4 у момент Т4. У момент Т5 ціль 2 знаходиться, як вже зазначалося, у точці Z5. Інформація про ціль є та/або була визначена станцією виявлення 12 у кожний з моментів Z1-Z5. Ця інформація по суті описує, точніше, інтерполює маршрут 4. На підставі одержаної інформації про ціль лічильнообчислювальний засіб 16 екстраполює очікуваний маршрут польоту 6 та/або видає дані, що описують очікуваний маршрут польоту 6 у межах від Z5 до Z6. Екстраполяцію маршруту польоту 6 виконує лічильно-обчислювальний засіб 16, й відповідні дані про маршрут польоту передаються та/або надходять до станції стеження 14 за допомогою засобу передачі 18. Екстраполяцію маршруту польоту б можна виконувати на лічильно-обчислювальному блоці 16.1 або на лічильно-обчислювальному блоці 16.2; якщо екстраполяцію маршруту польоту 6 спершу здійснює лічильно-обчислювальний блок 16.2, дані, що передаються засобом передачі 18, надходять на тактовій частоті, що дорівнює пошуковій тактовій частоті 2П/ΔΤ1; у такому разі навантаження на засіб передачі 18 менше, ніж при передачі даних на другій тактовій частоті 2П /ΔΤ2, котра вище за пошукову, тактову частоту 2П/ΔΤ1, на якій надходять дані до станції стеження 14 згідно з винаходом. Вища тактова частота є пов'язана з проміжком часу ΔΤ2, який становить лише частку проміжку часу ΔΤ1. На Фіг.1 співвідношення ΔΤ1/ΔΤ2 дорівнює 4; таке співвідношення проміжків часу й відповідних тактових часто т обрано лише для наочності. 11 80527 Маршр ут польоту 6 показує очікуваний рух цілі після моменту Т5. У проміжок часу між моментом Т5 та моментом Ύ6 ціль 2 пересувається з Z5, як можна очікувати, до Z6, і можна гадати, що у моменти Та, Тb, Тс вона хоча б приблизно знаходитиметься у точках Za, Zb, Zc. Ця фаза переходу починається у момент Т5: ціль 2 досягла сектору 15, який може покривати станція стеження 14, але, можливо, ще не є захопленою станцією стеження 14. Отже, станція стеження 14 ще не здатна автономно захопити ціль 2 та/або автономно відслідковувати її. Існує безліч причин, чому станція стеження 14 не може захопити ціль 2, хоча та безсумнівно знаходиться в її секторі стеження 15; наприклад, ціль 2 надто мала або її затуляє перепона, зображена на Фіг.1 просто як приклад у вигляді хмари С, або атмосферні умови та характер освітлення не дозволяють станції стеження 14 помітити ціль 2. Станція стеження 14 під час перехідного періоду керується ззовні з використанням даних про маршрут польоту згідно з винаходом, націлюючись своїми засобами прицілювання до місця, у якому є підстави очікувати ціль 2. Таким чином станція стеження 14 набуває здатність до певної міри відслідковувати ціль 2 "наосліп". У моменти Та та Тb станція стеження націлюється на точки Za та Zb відповідно, у яких знаходиться ціль 2, хоча ціль 2 затулена хмарою С і станція стеження 14 не може її захопити. У момент Тс ціль 2 знаходиться у точці Zc, і хмара С більш не становить перепони між станцією стеження 14 та ціллю 2. Перехідний період, під час якого слідкування за ціллю 2 керується ззовні, закінчується, як тільки ціль 2 досягає точки Z* у момент Т*. Тепер ціль 2 можна прослідковувати засобами виявлення станції 14, а засіб слідкування веде станцію стеження 14 за ціллю 2, інакше кажучи, станція стеження 14 тепер відслідковує ціль 2 в автономному режимі. У момент Т* ціль 2, вірніше, зображення 2' цілі 2 у точці прицілювання, утвореній початком мережі координат, з'являється на засобі візуалізації 24 станції стеження 14; однак при цьому вважається, що маршрут, яким насправді пролетіла ціль після моменту Т5, відповідає екстрапольованому маршрутові і спосіб спрацьовує ідеально або всі можливі помилки враховано. Якщо слідкування станції стеження 14 після моменту Т* надалі проходить ідеально, зображення 2' цілі 2 завжди залишається у точці прицілювання та/або на початку мережі координат. Якщо станція стеження 14 не захопила ціль 2 з моменту Т* і надалі, зображення 2' цілі 2 рухатиметься уздовж зображення 6' маршруту польоту 6, як показано на Фіг.1. Можна також накласти одні на одні віртуальні зображення цілі 2 та/або позначки цілі, що відтворюють фактичне місцезнаходження Z5 цілі 2 у момент Т5 та очікувані місцезнаходження Za та Zb цілі 2 у моменти Та та Тb; однак такі позначки цілі та не будуть зображеннями 2' і відтворюватимуть не ціль 2, а якусь фікцію. Блок візуалізації 22 станції виявлення 12 показує проходження минулого 4 та очікуваного маршруту 6 польоту цілі 2. 12 На Фіг.2 зображена друга система 10 стеження за ціллю згідно з винаходом, яка містить станцію виявлення 12, що здобуває інформацію не лише від цілі 2, а ще й від другої цілі 102. Цілі 2 та 102 показуються їхніми слідами 4 та 104 відповідно. Лічильно-обчислювальний блок 16.1 розподіляє цілі 2 та 102 для подальшого слідкування - ціль 2 до станції стеження 14, а ціль 102 до іншої станції стеження 114. Якщо другої цілі немає, ціль 2 може бути призначена до обох станцій стеження 14,114. Система 10 стеження за ціллю містить поряд з лічильно-обчислювальним блоком 16.2 ще один лічильно-обчислювальний блок 116.2, який співпрацює з другою станцією стеження 114. Станція стеження 14 має сектор стеження 15, а станція 114 - сектор стеження 115, які частково взаємно накладаються. До станції стеження 14 через засіб зв'язку 28 приєднані дві допоміжні системи 30,31, а до станції стеження 114 через засіб зв'язку 128 відповідно приєднані допоміжні системи 130,131. Допоміжні системи звичайно являють собою системи зброї, стволи та/або боєприпаси яких Ρ ведуть боротьбу з цілями 2, 102. Також варто зазначити, що станції стеження 14 та 114 разом з пов'язаними з ними допоміжними системами 30,31 та 130,131 відповідно утворюють дві бойові системи 1 та 100 відповідно. Подальший опис є максимально спрощений, причому висновки, спосіб та специфічні для тієї чи іншої системи подробиці цього винаходу, які описані при розгляді Фіг.1, стосуються також Фіг.2. Ціль 2 була приділена станції стеження 14 й досягла її сектора стеження 15 у момент Т5; у перехідний період аж до моменту Т* станція стеження 14 відслідковує ціль 2 у керованому ззовні "сліпому" режимі, доки не одержить змогу захопити ціль 2 у точці Ζ* й надалі відстежувати її в автономному режимі. У момент Т7 ціль 2 досягає точки Ζ7, тобто простору, в якому її вже можна перехоплювати. У момент Т8 ціль 2 досягає точки Ζ8. Боєприпаси Р, призначені для знищення цілі 2, вистрілюються у момент Т7 на підставі звичайного випереджаючого розрахунку не до точки Р7, а до точки Р8, де ціль 2 стикається з боєприпасами Ρ у момент Т8. Отже, маршрут польоту закінчується у точці Ζ8. Друга ціль 102 була приділена станції стеження 114 й досягла її сектора стеження 115 у момент Τ105; у перехідний період аж до моменту Т** станція стеження 114 відслідковує ціль 102 у керованому ззовні "сліпому" режимі, доки не одержить змогу захопити ціль 102 й надалі відстежувати її в автономному режимі. Після цього друга ціль 102 знищується таким само чином, як і ціль 2, боєприпасами з автономних систем 130,131. Маршрут 106 польоту закінчується у точці Ζ108. 13 80527 14
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for tracking a target and a system for the realization of the method
Автори англійськоюFisher Pierot
Назва патенту російськоюСпособ слежения за целью и система для осуществления способа
Автори російськоюФишер Пьер
МПК / Мітки
МПК: G01S 13/04
Мітки: система, спосіб, стеження, ціллю
Код посилання
<a href="https://ua.patents.su/7-80527-sposib-ta-sistema-dlya-stezhennya-za-cillyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб та система для стеження за ціллю</a>
Спосіб стеження за наявністю трикутника крутіння при однопроцесному прядінні і крутінні та пристрій для його здійснення
Номер патенту: 30716
Опубліковано: 15.12.2000
Автори: Якимчук Радій Паладієвич, Горохов Володимир Олексійович, Горизонтова Олена В'ячеславівна
МПК: D01H 13/14
Мітки: однопроцесному, пристрій, прядінні, трикутника, крутінні, крутіння, спосіб, стеження, здійснення, наявністю
Формула / Реферат:
1. Спосіб стеження за наявністю трикутника крутіння при однопроцесному прядінні і крутінні, що включає установлення важеля пристрою по центральній осі прядіння з введенням контактного щупа в робочу зону, відстеження в автоматичному режимі наявності мичок і пряжі, який відрізняється тим, що попередньо переміщують рухомий фотоелектричний датчик в січній трикутник крутіння площині по лінії центральної осі прядіння в робоче положення за допомогою...
Система укх радіозв’язку
Номер патенту: 8052
Опубліковано: 15.07.2005
Автори: Корнієнко Ігор Валентинович, Возняк Роман Миколайович, Глуцький Володимир Іванович, Катков Юрій Ігоревич, Алєксєєнко Олександр Олександрович
МПК: H04B 7/26
Мітки: радіозв'язку, система, укх
Формула / Реферат:
Система УКХ радіозв'язку, що містить одну або декілька базових станцій та дві або декілька рухомих станцій, розташованих навколо базової станції, при цьому рухомі станції містять приймальні антени з круговою діаграмою спрямованості та передавальні антени, яка відрізняється тим, що базова станція містить систему супутникової навігації, пристрій для кодування інформації, пристрій розрахунку азимуту на кореспондента, приймальну та передавальну...
Гідромеханічний пристрій для стеження у сільськогосподарській машині
Номер патенту: 19940
Опубліковано: 25.12.1997
Автори: Цвіліховський Григорій Волькович, Улько Валерій Миколаєвич, Молчанов Володимир Олександрович, Смілянський Наум Лейбович, Яновський Юлій Самуілович, Воронін Володимир Яковлевич, Білов Іван Іванович
МПК: A01B 39/00
Мітки: машини, пристрій, стеження, сільськогосподарський, гідромеханічний
Формула / Реферат:
Формула изобретения 1. Гидромеханическое следящее устройство сельскохозяйственной машины, включающее установленный на раме поворотный рабочий орган, кинематически связанный с гидроцилиндром, щуп, плоскоповоротный гидрораспределитель с золотником, выполненным с дугообразными каналами с перемычками, и механизм разгрузки гидросистемы, отличающееся тем, что, с целью повышения производительности...
Двосекційний гідромеханічний пристрій для стеження у сільськогосподарській машині
Номер патенту: 19939
Опубліковано: 25.12.1997
Автори: Корольов Леонід Володимирович, Воронін Володимир Яковлевич, Білов Іван Іванович, Цвіліховський Григорій Волькович, Яновський Юлій Самуілович, Улько Валерій Миколаєвич, Лобода Микола Трофимович, Смілянський Наум Лейбович
МПК: A01B 39/00
Мітки: пристрій, стеження, двосекційний, сільськогосподарський, машини, гідромеханічний
Формула / Реферат:
Формула изобретенияДвухсекционное гидромеханическое следящее устройство сельскохозяйственной машины, включающее копирующие щупы, исполнительные механизмы с гидрораспределителями и гидроцилиндрами привода рабочих органов и предохранительно-переливной гидроклапан с каналом управления разгрузкой гидросистемы. отличающееся тем, что, с целью повышения производительности и эксплуатационной надежности сельскохозяйственной машины за счет...
Високошвидкісна широкосмугова система радіозв’язку
Номер патенту: 4611
Опубліковано: 17.01.2005
Автори: Корнієнко Ігор Валентинович, Глуцький Володимир Іванович, Катков Юрій Ігоревич
МПК: H04B 7/26
Мітки: радіозв'язку, високошвидкісна, широкосмугова, система
Формула / Реферат:
Високошвидкісна широкосмугова система радіозв'язку, що містить одну або декілька базових станцій та одну або декілька рухомих станцій, розташованих навколо базової станції, при цьому радіозв'язок здійснюється між базовою та рухомими станціями за допомогою антен із коловою діаграмою спрямованості, яка відрізняється тим, що антени базових та рухомих станцій компонуються із вузькоспрямованих антен, сума діаграм спрямованості яких у...
Попередній патент: Спосіб приготування біологічно активної субстанції з п’явок
Наступний патент: Склад мембрани іоноселективного електрода для визначення активності іонів рубідію
Випадковий патент: Масо-габаритний макет стрілецької зброї револьверного типу