Затискний модуль
Номер патенту: 85894
Опубліковано: 10.12.2013
Автори: Карпусь Владислав Євгенович, Обравит Юрій Анатолійович, Іванов Віталій Олександрович
Формула / Реферат
1. Затискний модуль, що містить корпус та Г-подібний прихоплювач, який відрізняється тим, що оснащений кареткою, на якій розміщений корпус, причому корпус та каретка виконані з отворами, в яких установлені взаємно перпендикулярні ходові гвинти, крім того на ходовому гвинті корпуса установлений Г-подібний прихоплювач, виконаний з призмою.
2. Затискний модуль за п. 1, який відрізняється тим, що призма Г-подібного прихоплювача виконана зі змінними губками.
3. Затискний модуль за п. 1, який відрізняється тим, що призма Г-подібного прихоплювача виконана з самоустановлювальними опорами.
Текст
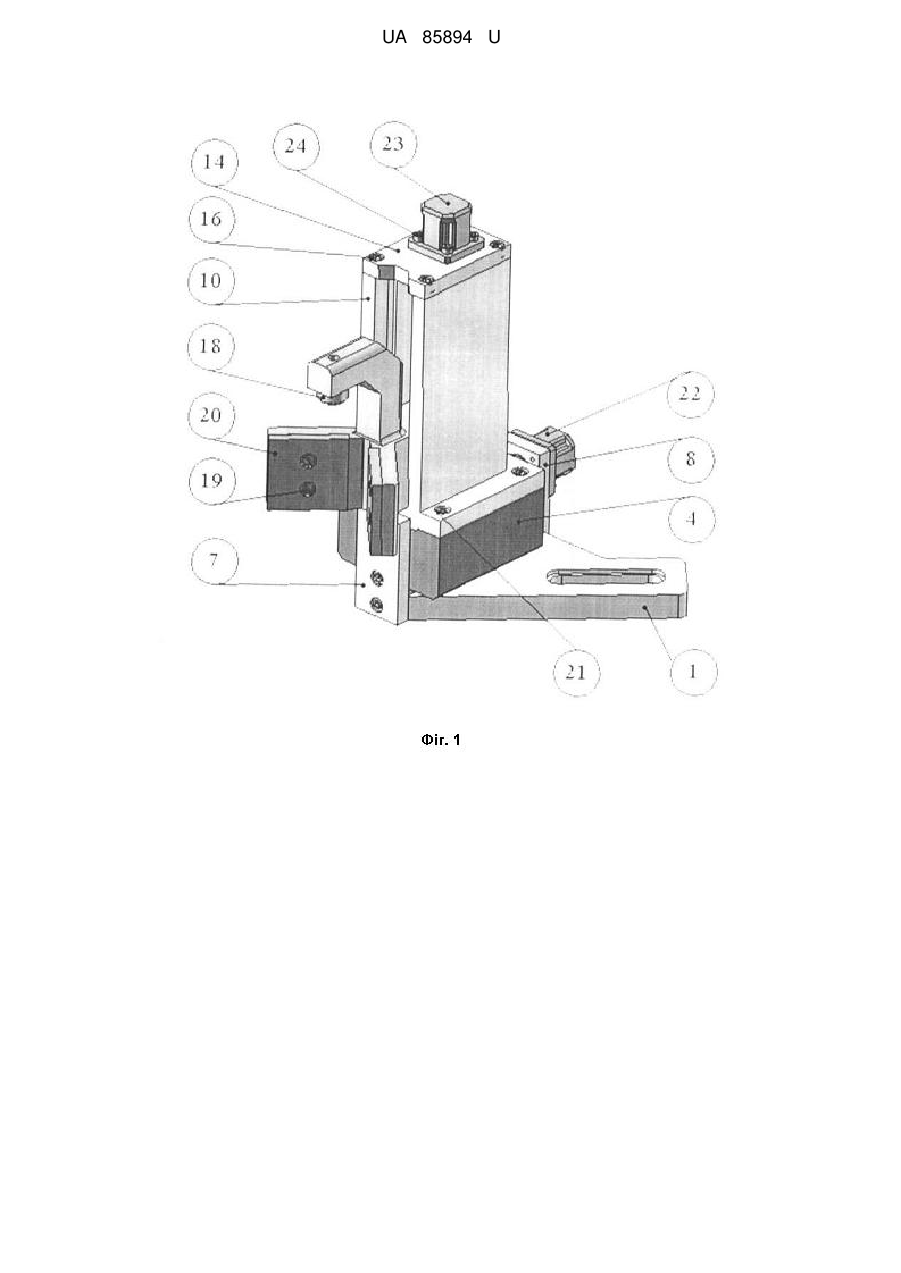
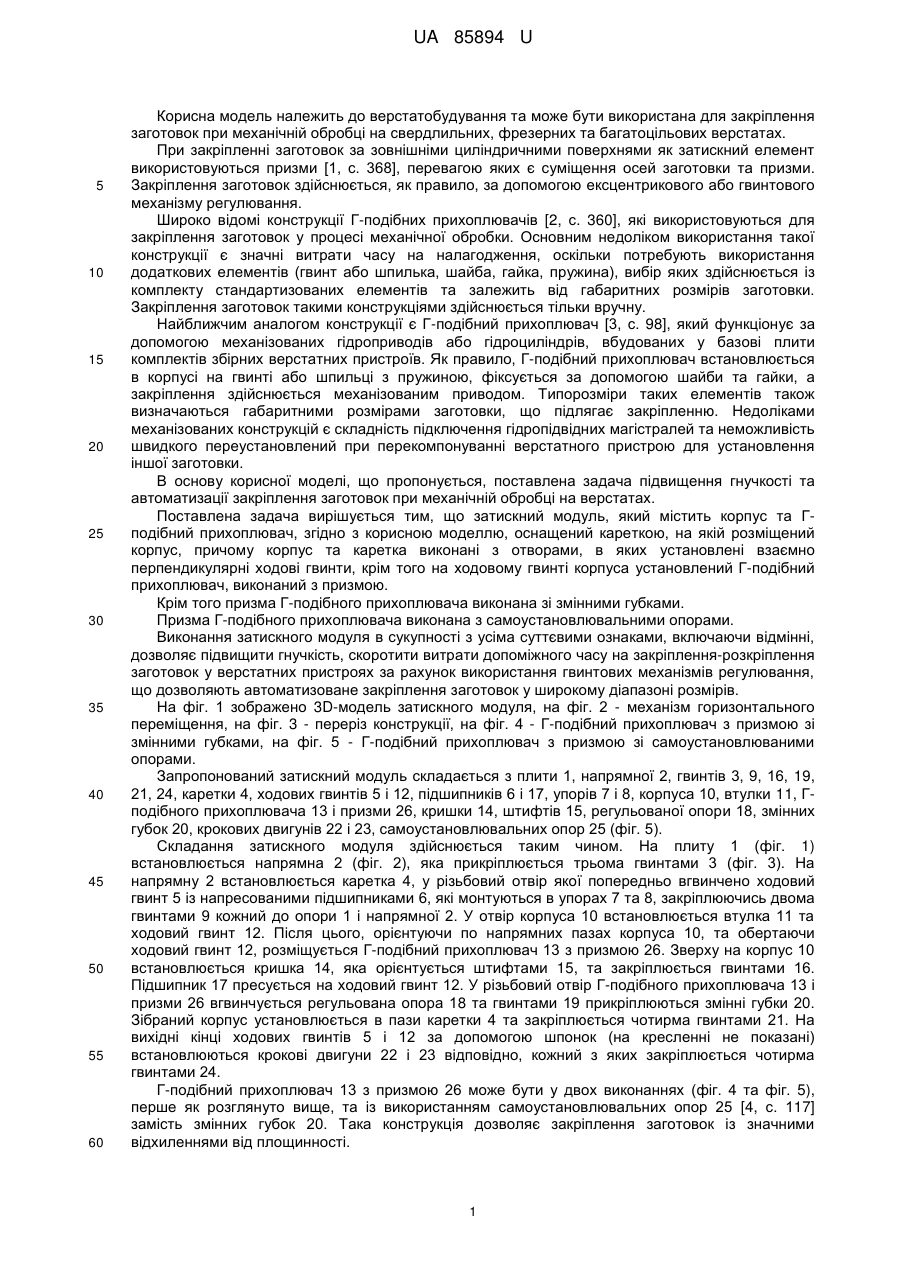
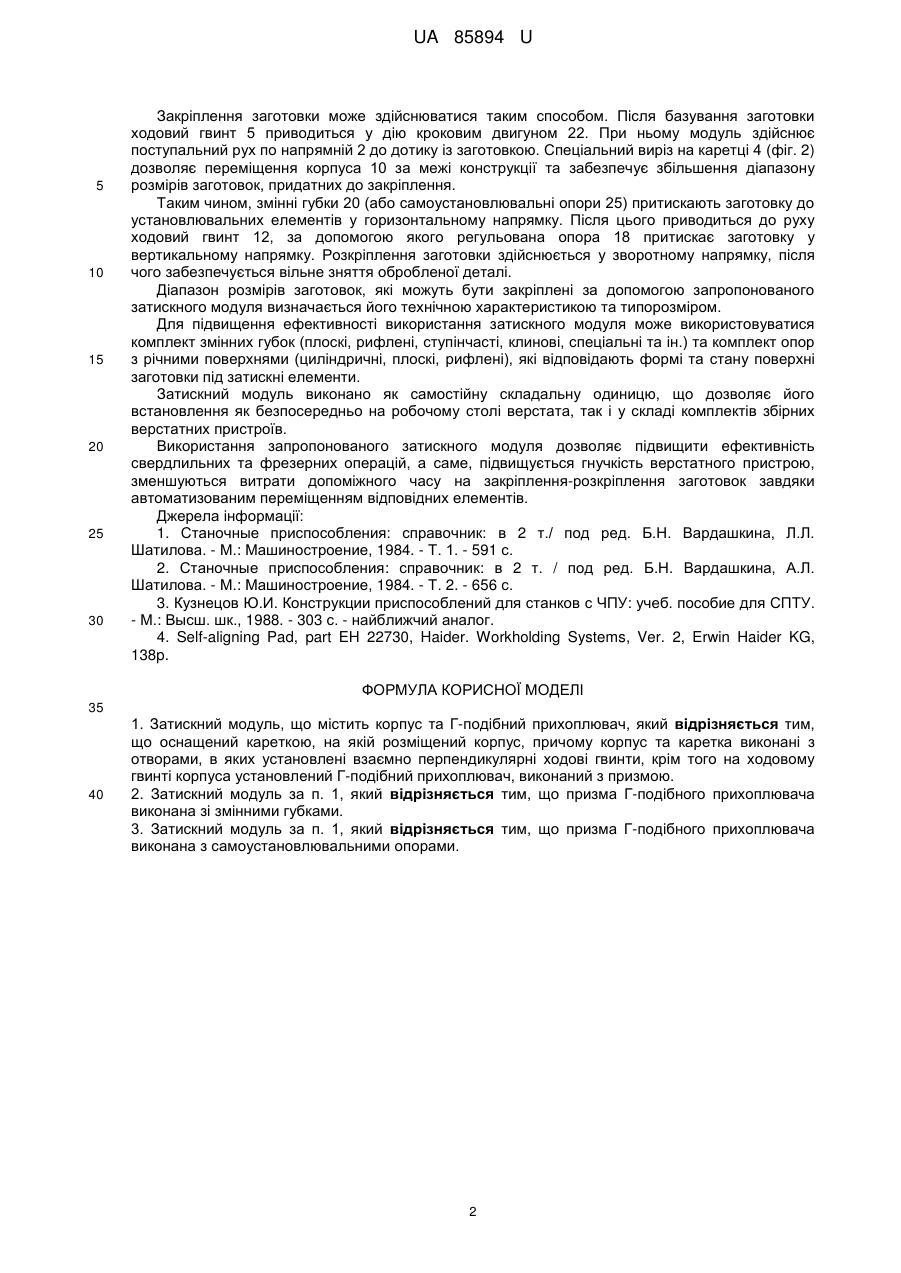
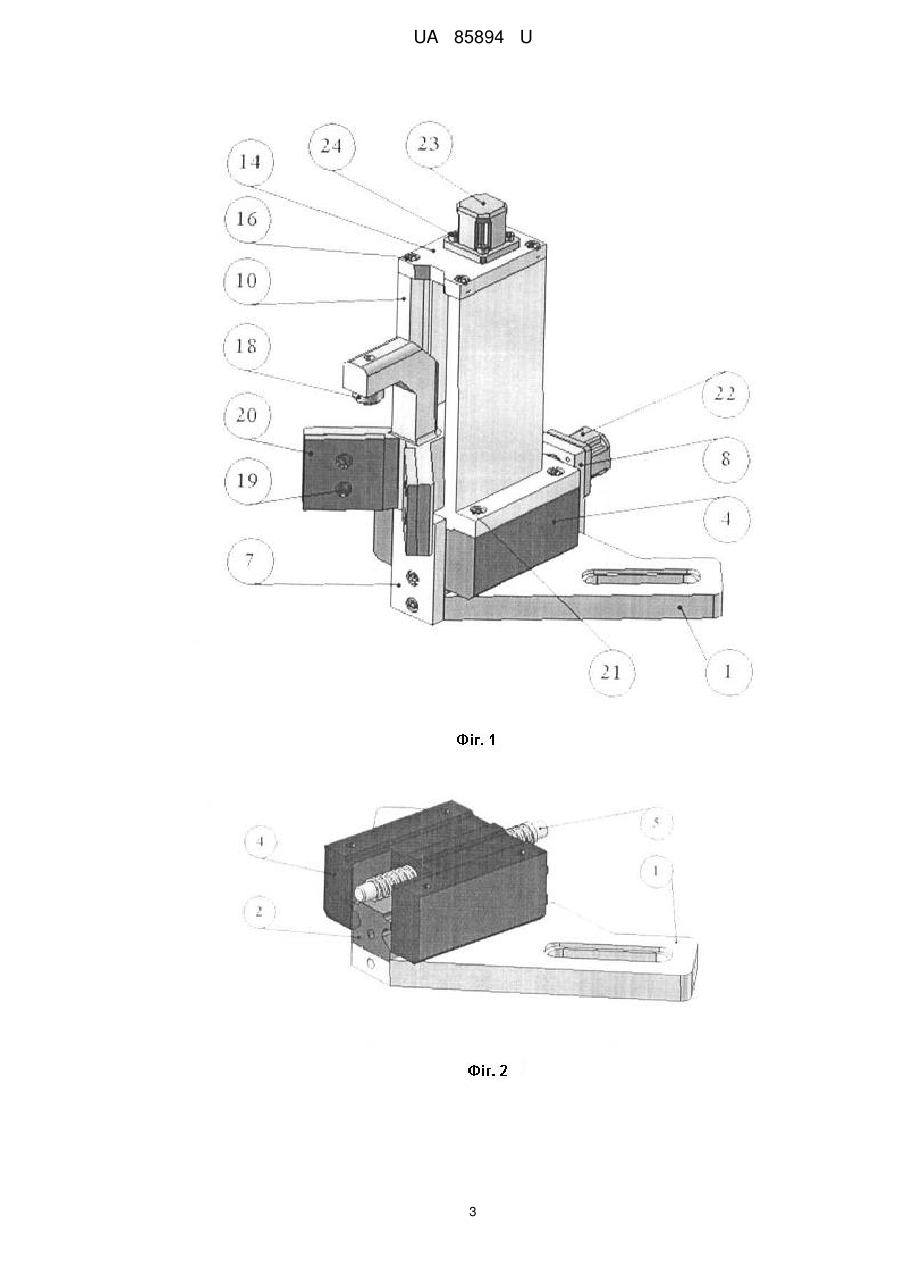
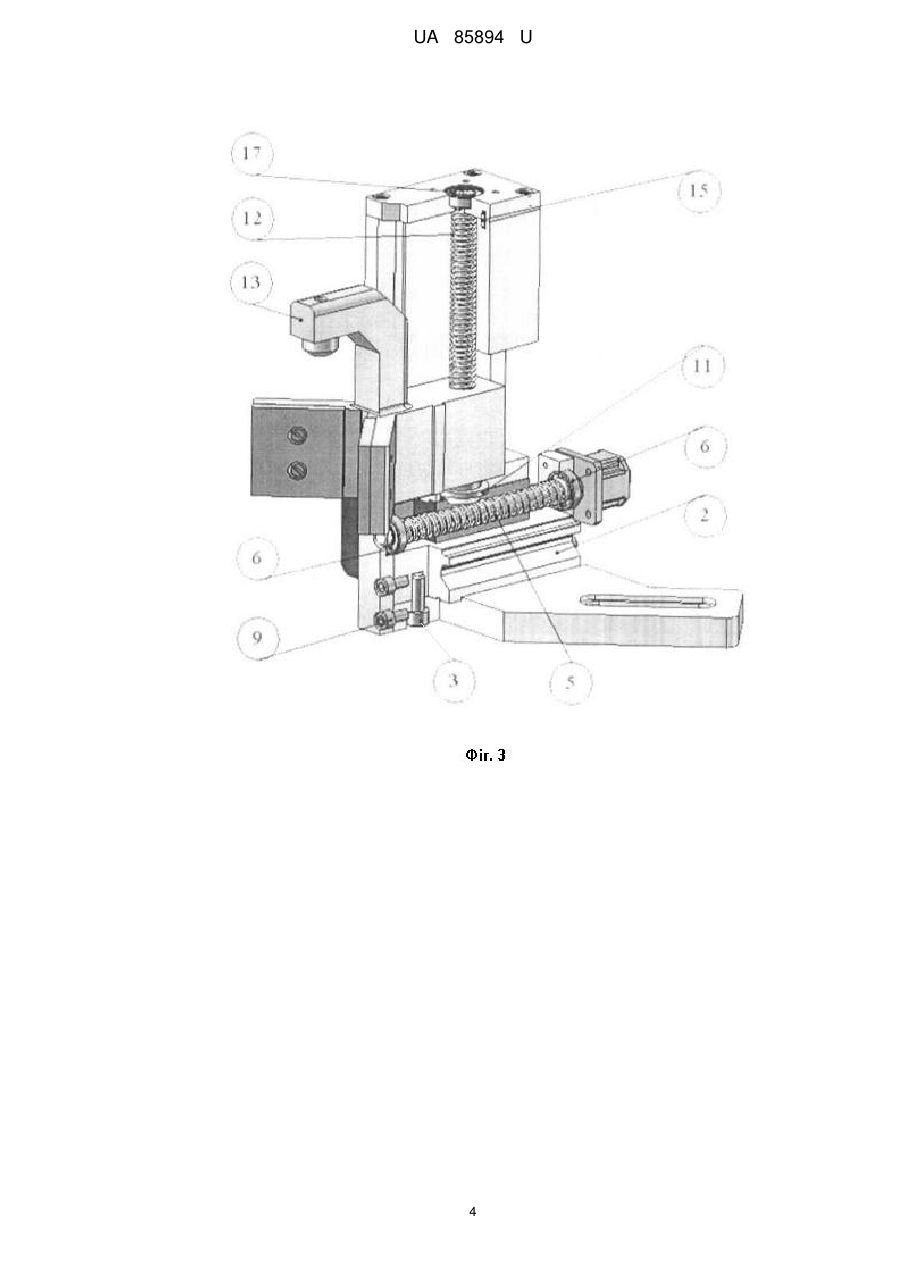
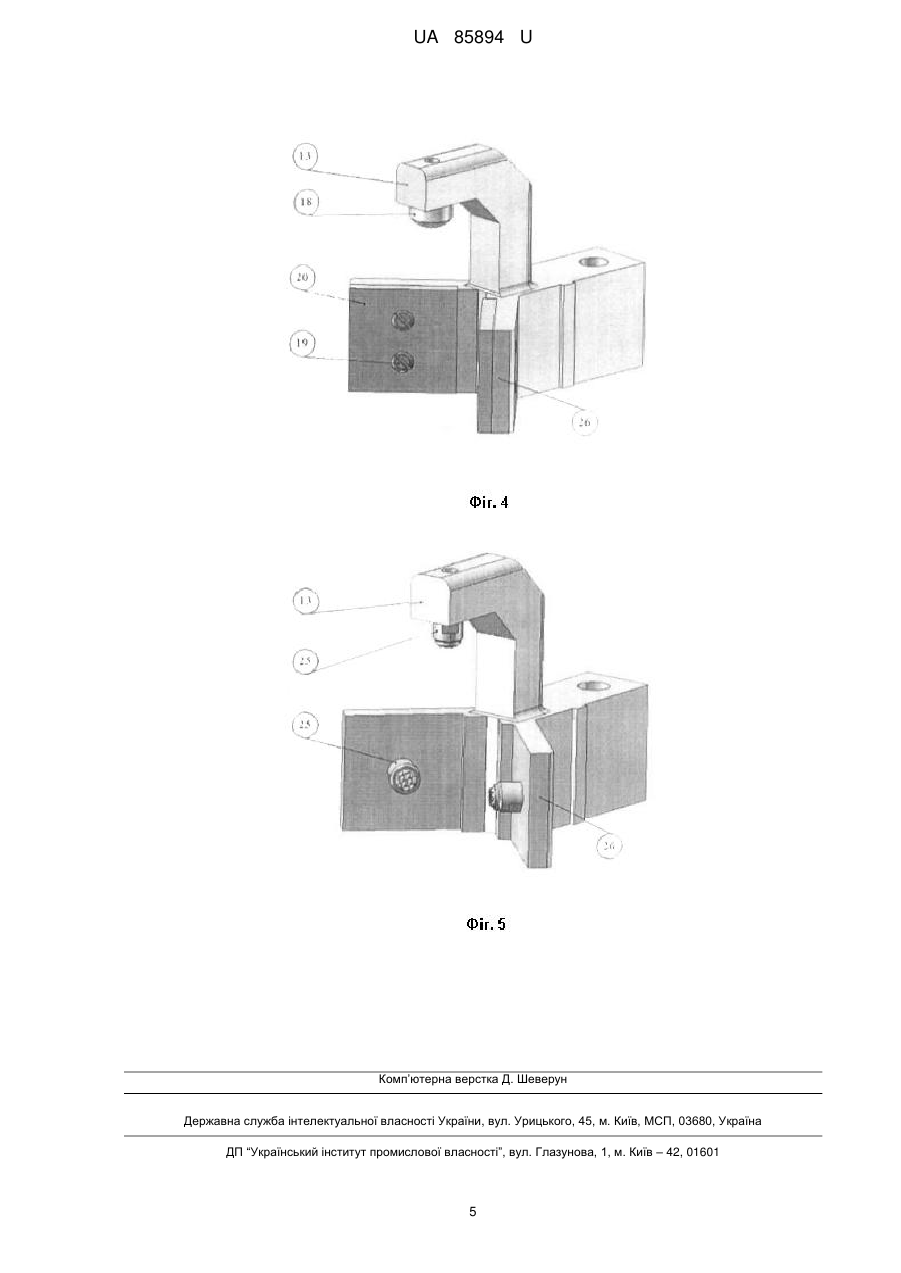
Реферат: UA 85894 U UA 85894 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до верстатобудування та може бути використана для закріплення заготовок при механічній обробці на свердлильних, фрезерних та багатоцільових верстатах. При закріпленні заготовок за зовнішніми циліндричними поверхнями як затискний елемент використовуються призми [1, с. 368], перевагою яких є суміщення осей заготовки та призми. Закріплення заготовок здійснюється, як правило, за допомогою ексцентрикового або гвинтового механізму регулювання. Широко відомі конструкції Г-подібних прихоплювачів [2, с. 360], які використовуються для закріплення заготовок у процесі механічної обробки. Основним недоліком використання такої конструкції є значні витрати часу на налагодження, оскільки потребують використання додаткових елементів (гвинт або шпилька, шайба, гайка, пружина), вибір яких здійснюється із комплекту стандартизованих елементів та залежить від габаритних розмірів заготовки. Закріплення заготовок такими конструкціями здійснюється тільки вручну. Найближчим аналогом конструкції є Г-подібний прихоплювач [3, с. 98], який функціонує за допомогою механізованих гідроприводів або гідроциліндрів, вбудованих у базові плити комплектів збірних верстатних пристроїв. Як правило, Г-подібний прихоплювач встановлюється в корпусі на гвинті або шпильці з пружиною, фіксується за допомогою шайби та гайки, а закріплення здійснюється механізованим приводом. Типорозміри таких елементів також визначаються габаритними розмірами заготовки, що підлягає закріпленню. Недоліками механізованих конструкцій є складність підключення гідропідвідних магістралей та неможливість швидкого переустановлений при перекомпонуванні верстатного пристрою для установлення іншої заготовки. В основу корисної моделі, що пропонується, поставлена задача підвищення гнучкості та автоматизації закріплення заготовок при механічній обробці на верстатах. Поставлена задача вирішується тим, що затискний модуль, який містить корпус та Гподібний прихоплювач, згідно з корисною моделлю, оснащений кареткою, на якій розміщений корпус, причому корпус та каретка виконані з отворами, в яких установлені взаємно перпендикулярні ходові гвинти, крім того на ходовому гвинті корпуса установлений Г-подібний прихоплювач, виконаний з призмою. Крім того призма Г-подібного прихоплювача виконана зі змінними губками. Призма Г-подібного прихоплювача виконана з самоустановлювальними опорами. Виконання затискного модуля в сукупності з усіма суттєвими ознаками, включаючи відмінні, дозволяє підвищити гнучкість, скоротити витрати допоміжного часу на закріплення-розкріплення заготовок у верстатних пристроях за рахунок використання гвинтових механізмів регулювання, що дозволяють автоматизоване закріплення заготовок у широкому діапазоні розмірів. На фіг. 1 зображено 3D-модель затискного модуля, на фіг. 2 - механізм горизонтального переміщення, на фіг. 3 - переріз конструкції, на фіг. 4 - Г-подібний прихоплювач з призмою зі змінними губками, на фіг. 5 - Г-подібний прихоплювач з призмою зі самоустановлюваними опорами. Запропонований затискний модуль складається з плити 1, напрямної 2, гвинтів 3, 9, 16, 19, 21, 24, каретки 4, ходових гвинтів 5 і 12, підшипників 6 і 17, упорів 7 і 8, корпуса 10, втулки 11, Гподібного прихоплювача 13 і призми 26, кришки 14, штифтів 15, регульованої опори 18, змінних губок 20, крокових двигунів 22 і 23, самоустановлювальних опор 25 (фіг. 5). Складання затискного модуля здійснюється таким чином. На плиту 1 (фіг. 1) встановлюється напрямна 2 (фіг. 2), яка прикріплюється трьома гвинтами 3 (фіг. 3). На напрямну 2 встановлюється каретка 4, у різьбовий отвір якої попередньо вгвинчено ходовий гвинт 5 із напресованими підшипниками 6, які монтуються в упорах 7 та 8, закріплюючись двома гвинтами 9 кожний до опори 1 і напрямної 2. У отвір корпуса 10 встановлюється втулка 11 та ходовий гвинт 12. Після цього, орієнтуючи по напрямних пазах корпуса 10, та обертаючи ходовий гвинт 12, розміщується Г-подібний прихоплювач 13 з призмою 26. Зверху на корпус 10 встановлюється кришка 14, яка орієнтується штифтами 15, та закріплюється гвинтами 16. Підшипник 17 пресується на ходовий гвинт 12. У різьбовий отвір Г-подібного прихоплювача 13 і призми 26 вгвинчується регульована опора 18 та гвинтами 19 прикріплюються змінні губки 20. Зібраний корпус установлюється в пази каретки 4 та закріплюється чотирма гвинтами 21. На вихідні кінці ходових гвинтів 5 і 12 за допомогою шпонок (на кресленні не показані) встановлюються крокові двигуни 22 і 23 відповідно, кожний з яких закріплюється чотирма гвинтами 24. Г-подібний прихоплювач 13 з призмою 26 може бути у двох виконаннях (фіг. 4 та фіг. 5), перше як розглянуто вище, та із використанням самоустановлювальних опор 25 [4, с. 117] замість змінних губок 20. Така конструкція дозволяє закріплення заготовок із значними відхиленнями від площинності. 1 UA 85894 U 5 10 15 20 25 30 Закріплення заготовки може здійснюватися таким способом. Після базування заготовки ходовий гвинт 5 приводиться у дію кроковим двигуном 22. При ньому модуль здійснює поступальний рух по напрямній 2 до дотику із заготовкою. Спеціальний виріз на каретці 4 (фіг. 2) дозволяє переміщення корпуса 10 за межі конструкції та забезпечує збільшення діапазону розмірів заготовок, придатних до закріплення. Таким чином, змінні губки 20 (або самоустановлювальні опори 25) притискають заготовку до установлювальних елементів у горизонтальному напрямку. Після цього приводиться до руху ходовий гвинт 12, за допомогою якого регульована опора 18 притискає заготовку у вертикальному напрямку. Розкріплення заготовки здійснюється у зворотному напрямку, після чого забезпечується вільне зняття обробленої деталі. Діапазон розмірів заготовок, які можуть бути закріплені за допомогою запропонованого затискного модуля визначається його технічною характеристикою та типорозміром. Для підвищення ефективності використання затискного модуля може використовуватися комплект змінних губок (плоскі, рифлені, ступінчасті, клинові, спеціальні та ін.) та комплект опор з річними поверхнями (циліндричні, плоскі, рифлені), які відповідають формі та стану поверхні заготовки під затискні елементи. Затискний модуль виконано як самостійну складальну одиницю, що дозволяє його встановлення як безпосередньо на робочому столі верстата, так і у складі комплектів збірних верстатних пристроїв. Використання запропонованого затискного модуля дозволяє підвищити ефективність свердлильних та фрезерних операцій, а саме, підвищується гнучкість верстатного пристрою, зменшуються витрати допоміжного часу на закріплення-розкріплення заготовок завдяки автоматизованим переміщенням відповідних елементів. Джерела інформації: 1. Станочные приспособления: справочник: в 2 т./ под ред. Б.Н. Вардашкина, Л.Л. Шатилова. - М.: Машиностроение, 1984. - Т. 1. - 591 с. 2. Станочные приспособления: справочник: в 2 т. / под ред. Б.Н. Вардашкина, А.Л. Шатилова. - М.: Машиностроение, 1984. - Т. 2. - 656 с. 3. Кузнецов Ю.И. Конструкции приспособлений для станков с ЧПУ: учеб. пособие для СПТУ. - М.: Высш. шк., 1988. - 303 с. - найближчий аналог. 4. Self-aligning Pad, part EH 22730, Haider. Workholding Systems, Ver. 2, Erwin Haider KG, 138p. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 1. Затискний модуль, що містить корпус та Г-подібний прихоплювач, який відрізняється тим, що оснащений кареткою, на якій розміщений корпус, причому корпус та каретка виконані з отворами, в яких установлені взаємно перпендикулярні ходові гвинти, крім того на ходовому гвинті корпуса установлений Г-подібний прихоплювач, виконаний з призмою. 2. Затискний модуль за п. 1, який відрізняється тим, що призма Г-подібного прихоплювача виконана зі змінними губками. 3. Затискний модуль за п. 1, який відрізняється тим, що призма Г-подібного прихоплювача виконана з самоустановлювальними опорами. 2 UA 85894 U 3 UA 85894 U 4 UA 85894 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюIvanov Vitalii Oleksandrovych, Karpus Vladyslav Yevhenovych
Автори російськоюИванов Виталий Александрович, Карпусь Владислав Евгеньевич
МПК / Мітки
МПК: B23Q 3/00
Код посилання
<a href="https://ua.patents.su/7-85894-zatisknijj-modul.html" target="_blank" rel="follow" title="База патентів України">Затискний модуль</a>
Затискний модуль
Номер патенту: 38073
Опубліковано: 25.12.2008
Автори: Іванов Віталій Олександрович, Карпусь Владислав Євгенович
МПК: B23Q 3/00
Формула / Реферат:
Затискний модуль, що має корпус та прихват, який відрізняється тим, що у корпусі розміщені поворотний вал та рейково-зубчаста передача, яка складається з вал-шестірні і вал-рейки, причому вал-рейка з'єднана з поворотним валом штифтом.
Різальний інструмент
Номер патенту: 16720
Опубліковано: 15.08.2006
Автори: Соловйов Максим Георгійович, Казакова Тетяна Валентинівна, Мироненко Євген Васильович
МПК: B26D 1/01
Мітки: інструмент, різальний
Формула / Реферат:
Різальний інструмент, що містить корпус, косу тягу, розрізну втулку, опорну пластину, різальну пластину та гвинт, який відрізняється тим, що додатково встановлено двосторонній прихоплювач з напаяними твердосплавними пластинам та кульку для контакту косої тяги з корпусом у точці.
Різальний інструмент
Номер патенту: 81106
Опубліковано: 25.06.2013
Автори: Гузенко Віталій Семенович, Гах Ілля Олегович, Гах Віталій Михайлович
МПК: B23B 27/16
Мітки: інструмент, різальний
Формула / Реферат:
Різальний інструмент, що містить корпус, різальну пластину і прихоплювач з похилою тильною опорною поверхнею, який відрізняється тим, що прихоплювач має упорну поверхню, яка взаємодіє у радіальному напрямі з корпусом через додатково встановлений пружний проміжний елемент.
Затискний патрон

Номер патенту: 62143
Опубліковано: 15.12.2003
Автори: Кузнєцов Юрій Миколайович, Волошин Віталій Несторович, Рудковський Андрій Миколайович
МПК: B23B 31/00
Формула / Реферат:
1. Затискний патрон, що містить корпус з розташованими під кутом до осі патрона отворами, в яких розміщені з можливістю осьового переміщення затискні кулачки з плунжерами, привід переміщення плунжерів, який відрізняється тим, що корпус має виступи з фасонними радіальними пазами для охоплення передніх кінців плунжерів і запобігання їх провертанню навколо своєї осі, а кулачки оснащені хвостовиком для з'єднання з плунжерами і виконані у вигляді...
Затискний патрон

Номер патенту: 9627
Опубліковано: 17.10.2005
Автори: Юрчишин Оксана Ярославівна, Волошин Віталій Нестерович, Кушик Валерій Григорович, Кузнєцов Юрій Миколайович
МПК: B23B 31/00
Формула / Реферат:
Затискний патрон, що містить корпус і встановлені з можливістю повороту на цапфах затискні елементи у вигляді підпружинених ексцентриків, привід затиску і синхронного переміщення ексцентриків, зубчате колесо, розміщене співвісно осі патрона, який відрізняється тим, що привід затиску з'єднаний із зубчатим колесом, виконаним з внутрішніми гвинтовими зубами, які призначені для взаємодії з відповідною поверхнею ексцентриків, що містить зовнішні...
Попередній патент: Бічна рама візка залізничного вагону
Наступний патент: Спосіб випробування електричних машин постійного струму під навантаженням
Випадковий патент: Спосіб визначення рівня антикардіоліпінових антитіл експрес-методом