Пристрій керованого охолодження машин постійного струму
Номер патенту: 87293
Опубліковано: 10.07.2009
Автори: Родькін Дмитро Йосипович, Дергачов Євгеній Іванович, Волошин Олексій Миколайович, Бялобрежський Олексій Володимирович




Формула / Реферат
Пристрій керованого охолодження машин постійного струму, що складається з вентилятора, який механічно з'єднаний з валом асинхронного двигуна, що живиться від тиристорного регулятора напруги, блока обчислень з математичною моделлю функціонування автоматичної системи регулювання температури електричної машини, яка враховує експлуатаційні режими роботи машини і розраховуєзміну значення температури обмотки якоря; величини струму й напруги живлення електричної машини, величини температури охолоджуючого повітря контролюються відповідними датчиками, який відрізняється тим, що додатково обладнаний перетворювачем частоти асинхронного двигуна вентилятора, датчиками швидкості обертання якоря електричної машини, струму обмотки збудження; виходи датчиків з'єднані з відповідними входами блока обчислень через аналого-цифровий перетворювач, вихід блока обчислень з'єднаний з перетворювачем частоти через цифро-аналоговий перетворювач, при цьому блок обчислень виконаний з можливістю враховування втрати у сталі.
Текст
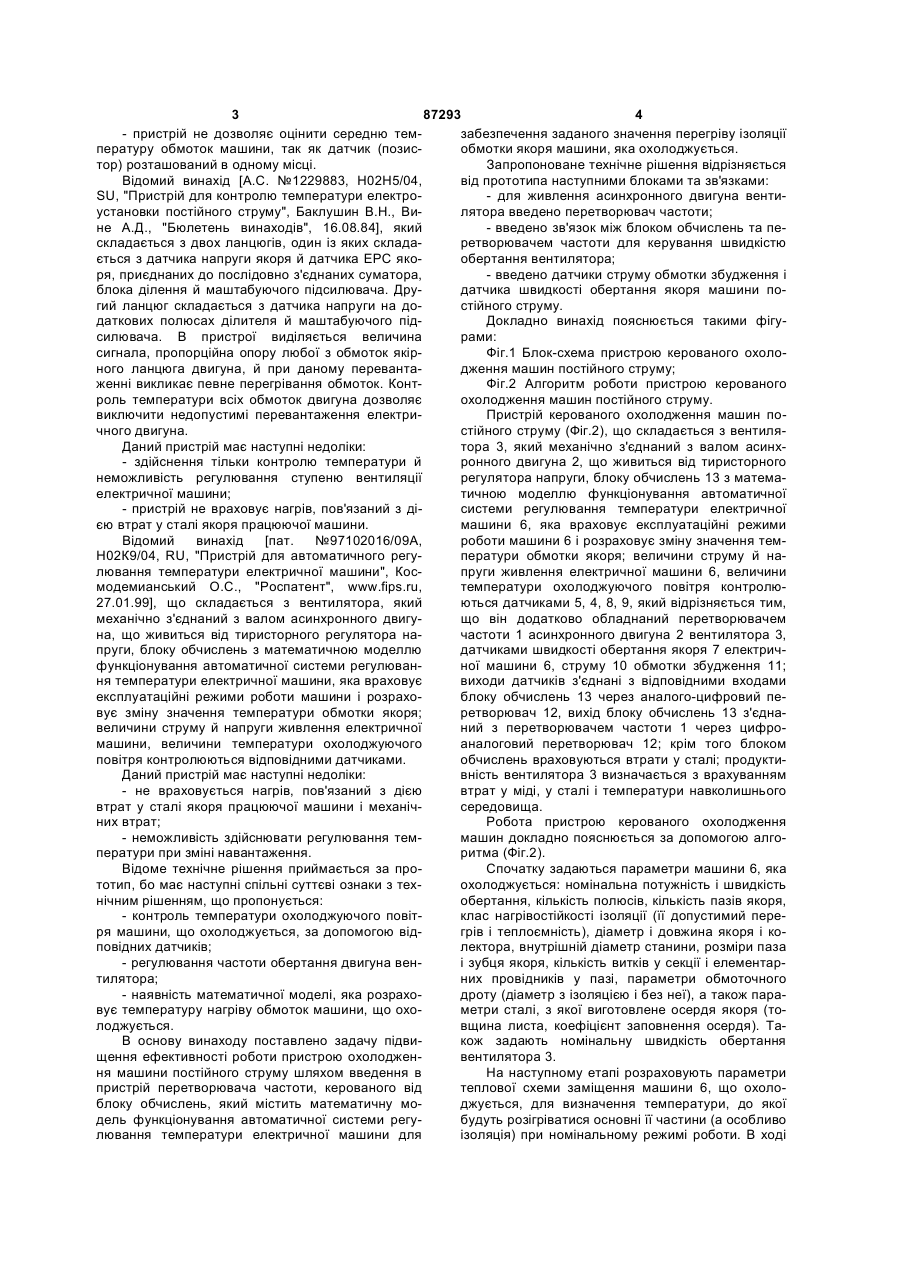
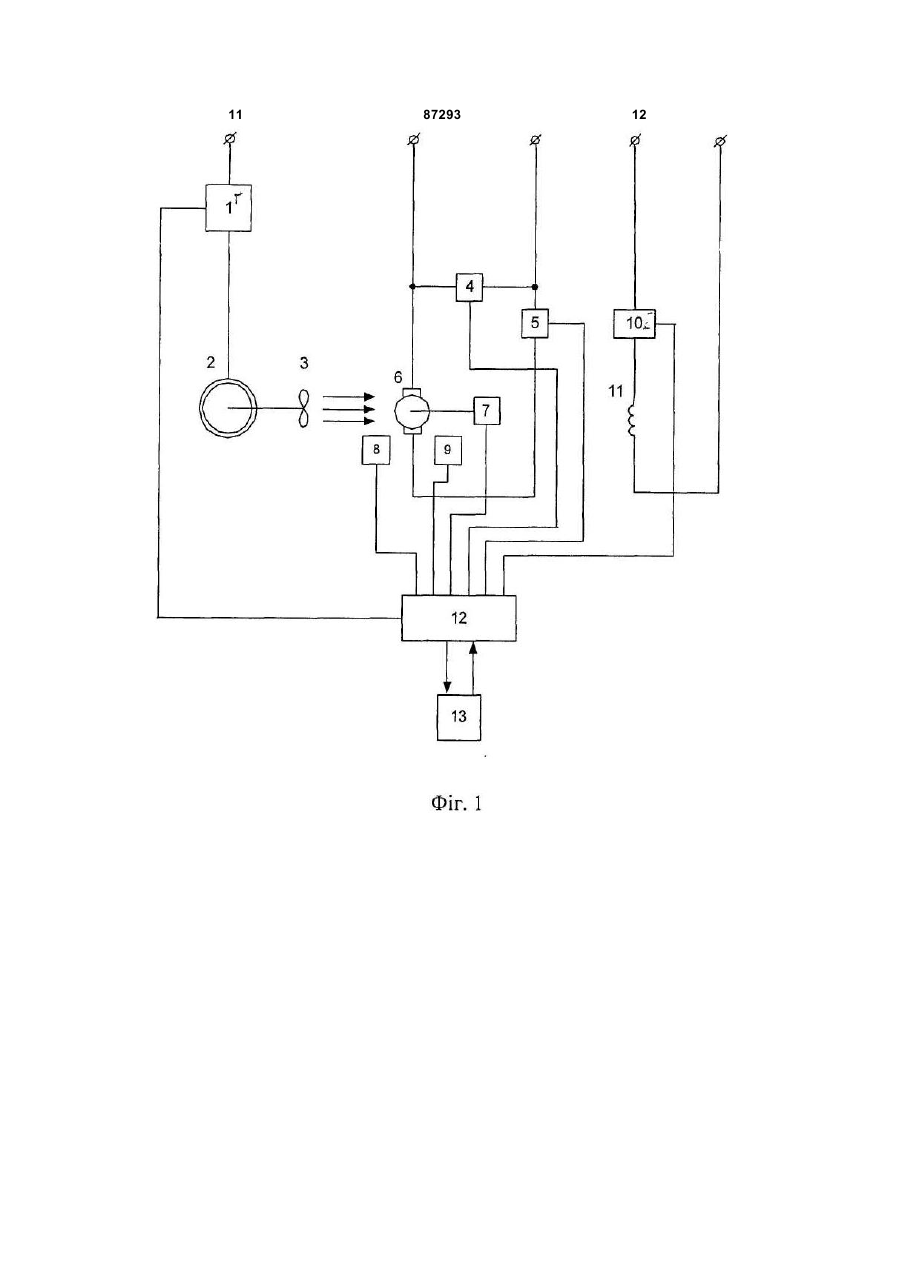
Пристрій керованого охолодження машин постійного струму, що складається з вентилятора, який механічно з'єднаний з валом асинхронного C2 1 3 87293 4 - пристрій не дозволяє оцінити середню темзабезпечення заданого значення перегріву ізоляції пературу обмоток машини, так як датчик (позисобмотки якоря машини, яка охолоджується. тор) розташований в одному місці. Запропоноване технічне рішення відрізняється Відомий винахід [А.С. №1229883, Н02Н5/04, від прототипа наступними блоками та зв'язками: SU, "Пристрій для контролю температури електро- для живлення асинхронного двигуна вентиустановки постійного струму", Баклушин В.Н., Вилятора введено перетворювач частоти; не А.Д., "Бюлетень винаходів", 16.08.84], який - введено зв'язок між блоком обчислень та пескладається з двох ланцюгів, один із яких складаретворювачем частоти для керування швидкістю ється з датчика напруги якоря й датчика ЕРС якообертання вентилятора; ря, приєднаних до послідовно з'єднаних суматора, - введено датчики струму обмотки збудження і блока ділення й маштабуючого підсилювача. Друдатчика швидкості обертання якоря машини погий ланцюг складається з датчика напруги на достійного струму. даткових полюсах ділителя й маштабуючого підДокладно винахід пояснюється такими фігусилювача. В пристрої виділяється величина рами: сигнала, пропорційна опору любої з обмоток якірФіг.1 Блок-схема пристрою керованого охолоного ланцюга двигуна, й при даному перевантадження машин постійного струму; женні викликає певне перегрівання обмоток. КонтФіг.2 Алгоритм роботи пристрою керованого роль температури всіх обмоток двигуна дозволяє охолодження машин постійного струму. виключити недопустимі перевантаження електриПристрій керованого охолодження машин почного двигуна. стійного струму (Фіг.2), що складається з вентиляДаний пристрій має наступні недоліки: тора 3, який механічно з'єднаний з валом асинх- здійснення тільки контролю температури й ронного двигуна 2, що живиться від тиристорного неможливість регулювання ступеню вентиляції регулятора напруги, блоку обчислень 13 з матемаелектричної машини; тичною моделлю функціонування автоматичної - пристрій не враховує нагрів, пов'язаний з дісистеми регулювання температури електричної єю втрат у сталі якоря працюючої машини. машини 6, яка враховує експлуатаційні режими Відомий винахід [пат. №97102016/09А, роботи машини 6 і розраховує зміну значення темН02К9/04, RU, "Пристрій для автоматичного регуператури обмотки якоря; величини струму й налювання температури електричної машини", Коспруги живлення електричної машини 6, величини модемианський О.С., "Роспатент", www.fips.ru, температури охолоджуючого повітря контролю27.01.99], що складається з вентилятора, який ються датчиками 5, 4, 8, 9, який відрізняється тим, механічно з'єднаний з валом асинхронного двигущо він додатково обладнаний перетворювачем на, що живиться від тиристорного регулятора начастоти 1 асинхронного двигуна 2 вентилятора 3, пруги, блоку обчислень з математичною моделлю датчиками швидкості обертання якоря 7 електричфункціонування автоматичної системи регулюванної машини 6, струму 10 обмотки збудження 11; ня температури електричної машини, яка враховує виходи датчиків з'єднані з відповідними входами експлуатаційні режими роботи машини і розрахоблоку обчислень 13 через аналого-цифровий певує зміну значення температури обмотки якоря; ретворювач 12, вихід блоку обчислень 13 з'єднавеличини струму й напруги живлення електричної ний з перетворювачем частоти 1 через цифромашини, величини температури охолоджуючого аналоговий перетворювач 12; крім того блоком повітря контролюються відповідними датчиками. обчислень враховуються втрати у сталі; продуктиДаний пристрій має наступні недоліки: вність вентилятора 3 визначається з врахуванням - не враховується нагрів, пов'язаний з дією втрат у міді, у сталі і температури навколишнього втрат у сталі якоря працюючої машини і механічсередовища. них втрат; Робота пристрою керованого охолодження - неможливість здійснювати регулювання теммашин докладно пояснюється за допомогою алгоператури при зміні навантаження. ритма (Фіг.2). Відоме технічне рішення приймається за проСпочатку задаються параметри машини 6, яка тотип, бо має наступні спільні суттєві ознаки з техохолоджується: номінальна потужність і швидкість нічним рішенням, що пропонується: обертання, кількість полюсів, кількість пазів якоря, - контроль температури охолоджуючого повітклас нагрівостійкості ізоляції (її допустимий переря машини, що охолоджується, за допомогою відгрів і теплоємність), діаметр і довжина якоря і коповідних датчиків; лектора, внутрішній діаметр станини, розміри паза - регулювання частоти обертання двигуна вені зубця якоря, кількість витків у секції і елементартилятора; них провідників у пазі, параметри обмоточного - наявність математичної моделі, яка розраходроту (діаметр з ізоляцією і без неї), а також паравує температуру нагріву обмоток машини, що охометри сталі, з якої виготовлене осердя якоря (толоджується. вщина листа, коефіцієнт заповнення осердя). ТаВ основу винаходу поставлено задачу підвикож задають номінальну швидкість обертання щення ефективності роботи пристрою охолодженвентилятора 3. ня машини постійного струму шляхом введення в На наступному етапі розраховують параметри пристрій перетворювача частоти, керованого від теплової схеми заміщення машини 6, що охолоблоку обчислень, який містить математичну моджується, для визначення температури, до якої дель функціонування автоматичної системи регубудуть розігріватися основні її частини (а особливо лювання температури електричної машини для ізоляція) при номінальному режимі роботи. В ході 5 87293 роботи машини 6 параметри її теплової схеми за2,5l n , le = міщення не змінюються. æ di ö Визначають кутові швидкості активної частини ÷ -1 11 × ç , ç ÷ якоря n a й колектора n к . è dм ø na = Da w , 2 Dк w , 2 nк = де Dа й Dк - діаметри якоря й колектора; w - швидкість обертання якоря, w = p × n ; 30 n - частота обертання якоря. Визначають коефіцієнти тепловіддачі активної й лобової частин, а також колектора по емпіричним формулам: aa = 9,5 × æ1 + 0,6n0,9 ö, ç a ÷ è ø Тепловий опір від поверхні активної частини обмотки до повітря: Ra = 1 , p × D a × l × aк 1 æ æ ç ç S л ç а л ç1 ç ç è è lб l, f ö ÷ æ 1 ÷+ç ç ÷ è rб ø æ ö ç lб ÷×ç ÷ , ø çl è f öö ÷÷ ÷÷ ÷÷ øø , де Sл - площа поверхні на одну сторону якоря S л = 0,95 × p × D a × l, ; f lб - довжина лобової частини обмотки; l'f u= де h1, hк, r1, r2 - геометричні розміри пазу. Тепловий опір пазової ізоляції: é ù ê ú D in 1 ê 1 ú, + R in = × z × l ê P × li 0,33 ö ú æ 12l e × ç u + ÷ú ê u øú ê è ë û П периметр пазової æ 2ö P 2h1 + ç ÷r1 + p × r2 ; = è3ø z - кількість пазів якоря; D in - товщина ізоляції пазу; Rz = нки; D б - товщина ізоляції під бандажами; l u - коефіцієнт теплопередачі ізоляції. Визначають тепловий опір колектор - повітря: R ко = 1 , p × D к × 1,25 × lк × a к де lк - довжина колектора. Визначають еквівалентний поперечний коефіцієнт теплопередачі пучка дротів l е : r2 + h1 + 0,5 × r1 , 3 × z × b z × l × k c × l Fe де bz - відстань між пазами якоря; kc - коефіцієнт заповнення якоря; lFe , - коефіцієнт теплопередачі сталі якоря; l - довжина якірної частини обмотки. Розраховують результуючий тепловий опір - розрахунковий виліт лобової частини обDб 1 + - середня температура плоскої стіlu a ізоляції, l1 - коефіцієнт теплопровідності пазової ізоляції. Розраховують тепловий опір від пазів до поверхні якоря: мотки; rб p (h1 - hк ) , + (r1 - r2 ) 4 де де l - довжина якірної частини обмотки. Тепловий опір від поверхні лобової частини: R ла = де l n - коефіцієнт теплопередачі ізоляції обмоточного дроту; di , dм - діаметри обмоточного дроту з ізоляцією і без неї. Визнають внутрішній опір пазу за допомогою коефіцієнта: a л = 12,5 × æ1 + 0,85n 0,85 ö, ÷ ç а ø è 0 а к = 16 × æ1 + 0,6n к ,75 ö. ç ÷ è ø 6 Rco: Rco=Rz+Ra Розраховують тепловий опір лобових частин машини: R мл = ря; lл , 0,5 × S м × l м де lл - довжина лобової частини обмотки яко æpö 2 S м = z × Nn ç ÷ × dм - загальна площа перерізу è4ø дротів; Nn - кількість провідників у пазі; l м - коефіцієнт теплового опору міді. 7 87293 8 Для того, щоб забезпечити безаварійну роботу Тепловий опір Rіл знаходять, виходячи з примашини 6, що охолоджується, задають робоче пущення, що l м ® ¥ : перевищення температури обмотки якоря Q мр 0,8 × Q із . = hл , R іл = На наступному етапі вмикають вентилятор 3 12 × S л × l ел на швидкість обертання 0,8wном , подаючи керуючий сигнал на перетворювач частоти 1. Вентиляде l ел - коефіцієнт теплопередачі пучка дротор вмикають на швидкість обертання меншу, ніж тів; номінальна, так як номінальна швидкість обертанhл - товщина лобової частини обмотки. ня розраховується на найважчий режим його роРезультуючий тепловий опір для обох лобових боти. Через 1 хвилину після ввімкнення вентилячастин якірної обмотки машини: тора запускають машину 6, що охолоджується. На наступному етапі проводиться вимірюванR ня сигналів датчиків, які визначають поточні знаRла + Rіл + мл 30 . чення струму Ія[і] і напруги якоря Uя[i], струму збуRмо = 2 дження Ізб[і], швидкості обертання якоря охолоджуємої машини w[і] і температури охолоВизначають тепловий опір зв'язку обмотки з джуючого повітря на вході і виході його з машини, колектором: Т1[і] і Т2[і] відповідно. Значення температури охолоджуючого повітря на вході його в машину Т1[і] не повинно перевищувати 20°С. Температуру охолоR R R мк = 0,6 × (w с - 1) мл іл , джуючого повітря на виході з машини Т2[і] викориwс стовують для додаткового контролю за темпераде wс - кількість витків у секції. Знаходять результуючу теплову провідність від обмотки якоря до охолоджуючого повітря: Lі = 1 1 1 + + . R мо (R co + R in ) (R ко + R мк ) турою обмотки якоря машини 6. На наступному етапі за методом діагностики машин постійного струму визначають опір якірного ланцюга машини 6, що охолоджується. Для цього за виміряними даними складається система диференційних рівнянь: dw[] i dI [] і i і Uя [] × Ія і [] L я []× Ія і [] я + I2 [] × R я [] + J i []w i ×[] і = і × × + a × w2 [], яі dt dt U зб [] × Ізб [] = L зб [] × І зб [] × і і і і де Lя[і] - індуктивність якірного ланцюга; Rя[і] - опір обмотки якоря; dI я [] і - похідна струму якоря машини; dt J[і] - момент інерції частин машини, що обертаються; а - момент опору обертанню; dw[] i - похідна швидкості обертання якоря маdt шини; Uзб[i] - напруга збудження машини; Lзб[i] - індуктивність обмотки збудження; dI зб [] і - похідна струму збудження; dt Rзб[i]- опір обмотки збудження. У відповідність з виразом складається система рівнянь, з якої визначають опір якірного ланцюга (який складається з суми опору обмотки якоря Rя[і] і додаткових полюсів Rдп[і]). На наступному етапі розраховують втрати, що призводять до нагріву: втрати в обмотці якоря Pя[і] dIзб [] 2 і + I [] × R зб [], і і зб dt і додаткових полюсах Pдп[і], Pзд[і], втрати у сталі Рст[i]. Суму втрат, що приводять до нагріву, в обмотці якоря Pя[і] і додаткових полюсах Pдп[і], визначають наступним чином: Pя, дп [] = (R я [] + R дп []) × І2 [] i і і яі Питомі втрати у сталі якоря визначають при випробуваннях під час яких з якоря машини обов'язково знімається навантаження, тобто машина працює у режимі холостого ходу. Проводять діагностику машини шляхом завдання швидкості при номінальному потоці, зміні струму збудження, вимірі струму якоря, напруги на якорі, струму збудження при чотирьох значеннях струму збудження (1,0; 0,75; 0,5; 0,3)Iзбн шляхом зміни напруги на обмотці збудження. Повторюють виміри при чотирьох заданих значеннях швидкості (1,0; 0,75; 0,5; 0,3)wн, складають систему з рівнянь для кожного з заданих значень швидкості: 9 87293 10 Uя0Ія0 = І2 Rя,дп + DРмехw1 + U2 С0w1 + Із0Uя0С1w1 + І2 С2w1 з0 я0 я0 Uя1 я1 = І21Rя, дп + DРмехw1 + U21С0w1 + Із1Uя1С1w1 + І21С2w1 І я я з Uя2Ія2 = І2 Rя,дп + DРмехw1 + U2 С0w1 + Із2Uя2С1w1 + І2 С2w1 з2 я2 я2 Uя3Ія3 = І2 R я,дп + DРмехw1 + U2 С0w1 + Із2Uя3С1w1 + І2 С2w1 я3 я3 з3 Вирішують систему і визначають DРмехw1 і коефіцієнти С0w1 , С1w1 , С2w1 питомих втрат у сталі, за допомогою яких визначають втрати: DРстw1 = U2С0w1 + ІзUяС1w1 + І2С2w1 . я з У процесі роботи поточне значення втрат у сталі визначається наступним чином: і і Рст [] = U2 []С0w1 + Ізб []UяС1w1 + І2 []С2w1 . і яі зб На наступному етапі проводять розрахунок поточних приведених втрат обмотки якоря Ра[і]: Ра [] = Ря, дп [] + і і Рст [] і , Rin 1+ Rco де поточні втрати у сталі Рст[і] враховують поточні додаткові втрати Рдод[і]. На наступному етапі розраховують перевищення температури повітря при поточному нагріві: Q n [] = Q мр i Р а [] і Lі . Розраховують кількість повітря, необхідну для охолодження машини 6 при поточному нагріві: Q n [] = i 0,5 × K n × (å P[]) i 1100 × Q n [] i , де K n - коефіцієнт заповнення якоря сталлю; å P[] = Pя, дп [] + Р ст [] - сума поточних втрат. i і і На наступному етапі знаходять необхідну частоту обертання вентилятора і подають керуючий сигнал на перетворювач частоти 1: nнеоб = Qn []× nном i Qном де nном - номінальна частота обертання вентилятора; Qном - кількість охолоджуючого повітря для номінального режиму. Якщо машина 6 продовжує працювати, повторюється цикл вимірювання за допомогою датчиків і т.д. Якщо робота машини 6 припинена, то її продовжують охоложувати напротязі 5 хвилин з попередньою частотою обертання вентилятора 3 для її повного охолодження. Після 5 хвилин охолодження непрацюючої машини 6 вимикається двигун 2 відключенням від мережі живлення перетворювача частоти 1. 11 87293 12 13 Комп’ютерна верстка О. Гапоненко 87293 Підписне 14 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for controlled cooling dc machine
Автори англійськоюBialobrezhskyi Oleksii Volodymyrovych, Derhachov Yevhenii Ivanovych, Voloshyn Oleksii Mykolaiovych
Назва патенту російськоюУстройство управляемого охлаждения машины постоянного тока
Автори російськоюБялобрежский Алексей Владимирович, Дергачов Евгений Иванович, Волошин Алексей Николаевич
МПК / Мітки
МПК: H02K 9/04
Мітки: пристрій, керованого, струму, машин, охолодження, постійного
Код посилання
<a href="https://ua.patents.su/7-87293-pristrijj-kerovanogo-okholodzhennya-mashin-postijjnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Пристрій керованого охолодження машин постійного струму</a>
Пристрій керованого охолодження машин постійного струму
Номер патенту: 24488
Опубліковано: 10.07.2007
Автори: Волошин Олексій Миколайович, Бялобрежський Олексій Володимирович, Дергачов Євгеній Іванович, Родькін Дмитро Йосипович
МПК: H02K 9/04
Мітки: пристрій, постійного, охолодження, машин, керованого, струму
Формула / Реферат:
Пристрій керованого охолодження машин постійного струму, що містить вентилятор, який механічно з'єднаний з валом асинхронного двигуна, що з'єднаний з тиристорним регулятором напруги; блок обчислень із математичною моделлю функціонування пристрою керованого охолодження електричних машин, який враховує експлуатаційні режими роботи машини і розраховує зміну значення температури обмотки якоря, що контролюється; для контролю струму навантаження й...
Пристрій для моделювання технологічного навантаження при випробуванні машин постійного струму
Номер патенту: 21805
Опубліковано: 10.04.2007
Автори: Скворцов Ігор Валерійович, Сергієнко Сергій Анатолійович, Герда Олександр Анатолійович, Коваль Віталій Анатолійович, Зачепа Юрій Володимирович
МПК: G01R 31/24
Мітки: машин, струму, пристрій, постійного, моделювання, випробуванні, технологічного, навантаження
Формула / Реферат:
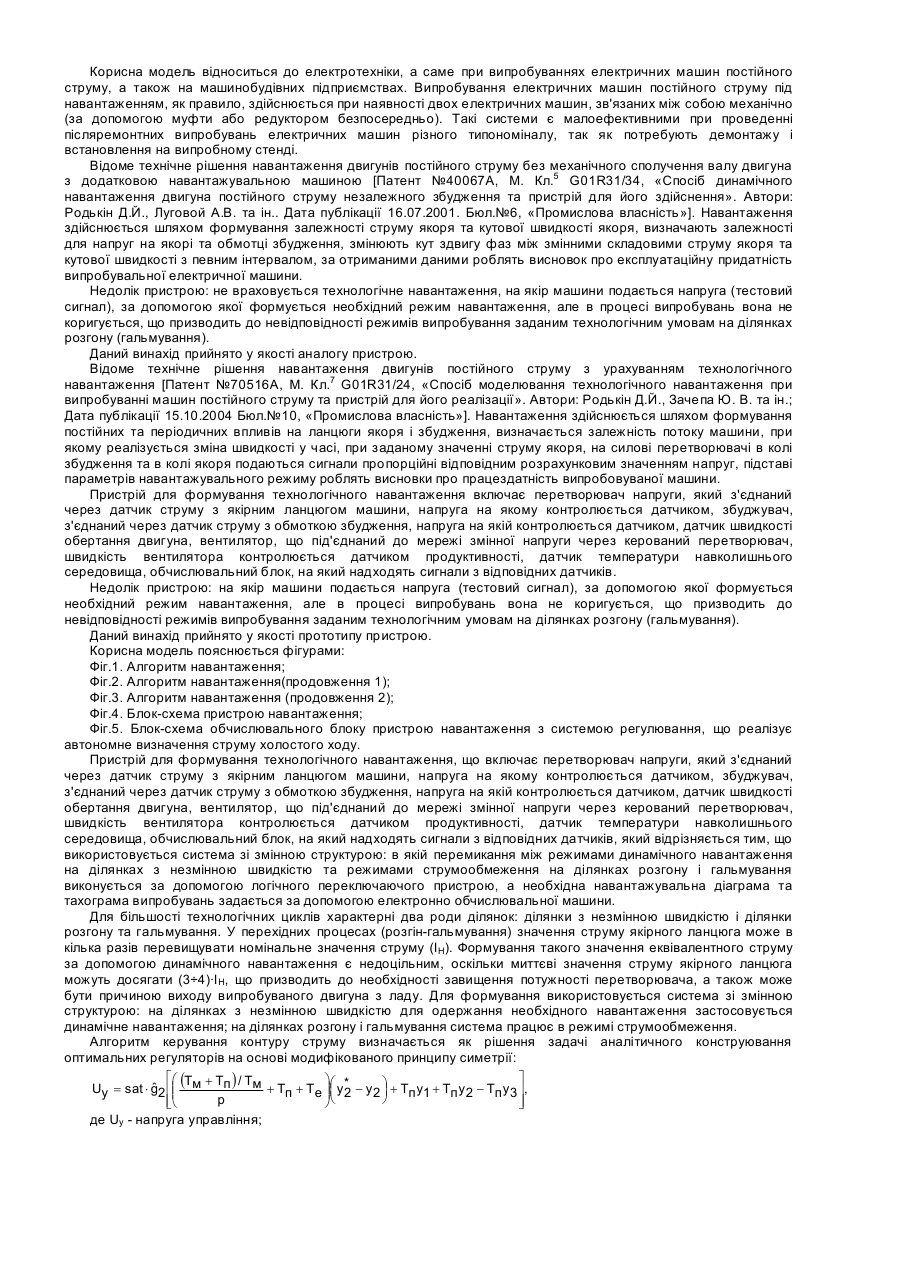
Пристрій для формування технологічного навантаження, що містить перетворювач напруги, який з'єднаний через датчик струму з якірним ланцюгом машини, напруга на якому контролюється датчиком, збуджувач, з'єднаний через датчик струму з обмоткою збудження, напруга на якій контролюється датчиком, датчик швидкості обертання двигуна, вентилятор, що під'єднаний до мережі змінної напруги через керований перетворювач, швидкість вентилятора контролюють...
Пристрій для поліпшення комутації колекторних електричних машин постійного струму
Номер патенту: 33504
Опубліковано: 15.02.2001
Автори: Іванов Олексій Борисович, Поляков Микола Георгійович, Колб Андрій Антонович
МПК: H02K 13/14
Мітки: пристрій, струму, комутації, електричних, поліпшення, постійного, машин, колекторних
Текст:
...і комутуючого потоку, виконаний на базі введених масштабного підсилювача і моделі комутуючого потоку, враховуючої розмагнічувальну дію вихрових струмів, вхід якої залучений до виходу датчика струму якоря, а вихід з'єднаний із першим входом масштабного підсилювача, другий вхід якого залучений до виходу датчика струму якоря, вихід масштабного підсилювача, пропорційний зазначеному сигналу керування, залучений до третього входу підсилювача, що...
Спосіб моделювання технологічного навантаження при випробуванні машин постійного струму
Номер патенту: 70516
Опубліковано: 15.10.2004
Автори: Скворцов Ігор Валерійович, Артеменко Артем Миколайович, Зачепа Юрій Володимирович, Родькін Дмитро Йосипович, Мастєровий Віктор Яковлевич
МПК: G01R 31/24
Мітки: спосіб, технологічного, машин, струму, навантаження, моделювання, випробуванні, постійного
Формула / Реферат:
1. Спосіб навантаження електричного двигуна постійного струму незалежного збудження, що полягає в створенні струмового навантаження шляхом підключення якоря двигуна до джерела низькочастотної змінної напруги, вимірюванні швидкості та струму якоря, нормуванні розрахункового струмового навантаження шляхом зміни амплітуди та частоти низькочастотної змінної напруги, який відрізняється тим, що для підвищення достовірності процесу навантаження та...
Спосіб діагностики машин постійного струму
Номер патенту: 27492
Опубліковано: 12.11.2007
Автори: Івченков Микола Володимирович, Побочій Володимир Григорович, Панкратов Анатолій Іванович
МПК: G01R 31/34
Мітки: машин, діагностики, струму, постійного, спосіб
Формула / Реферат:
Спосіб діагностики машин постійного струму, що включає безперервний контроль струму якоря й оборотної частоти обертання вала машини постійного струму, виділення перемінної і постійної складової струму якоря, аналого-цифрове перетворення перемінної і постійної складових струму якоря, а також оборотної частоти, спектральний аналіз перемінної складової струму якоря, виділення в спектрі струму якоря гармонік, що пульсують з частотами,...
Попередній патент: Застосування сирамезину в лікуванні злоякісних пухлин
Наступний патент: Спосіб і пристрій керування асинхронним генератором з конденсаторним збудженням
Випадковий патент: Спосіб виробництва заварного пряника