Спосіб об’єднання радіолокаційної інформації в багатопозиційній радіолокаційній системі
Номер патенту: 89598
Опубліковано: 25.04.2014
Автори: Дудуш Анатолій Сергійович, Седишев Юрій Миколайович, Трофимов Іван Миколайович, Коломійцев Олексій Володимирович
Формула / Реферат
Спосіб об'єднання радіолокаційної інформації в багатопозиційній радіолокаційній системі, який застосовує алгоритм децентралізованого виявлення при оптимальному розв'язувальному правилі в двох радіолокаційних станціях (РЛС) з повноповоротними антенами та об'єднаними в багатопозиційну радіолокаційну систему з кооперативним прийомом сигналів, який відрізняється тим, що додатково введено дві PЛC з повноповоротними антенами, які здійснюють синхронний послідовний огляд простору за азимутом та застосовується розв'язувальне правило "n із n" ("і").
Текст
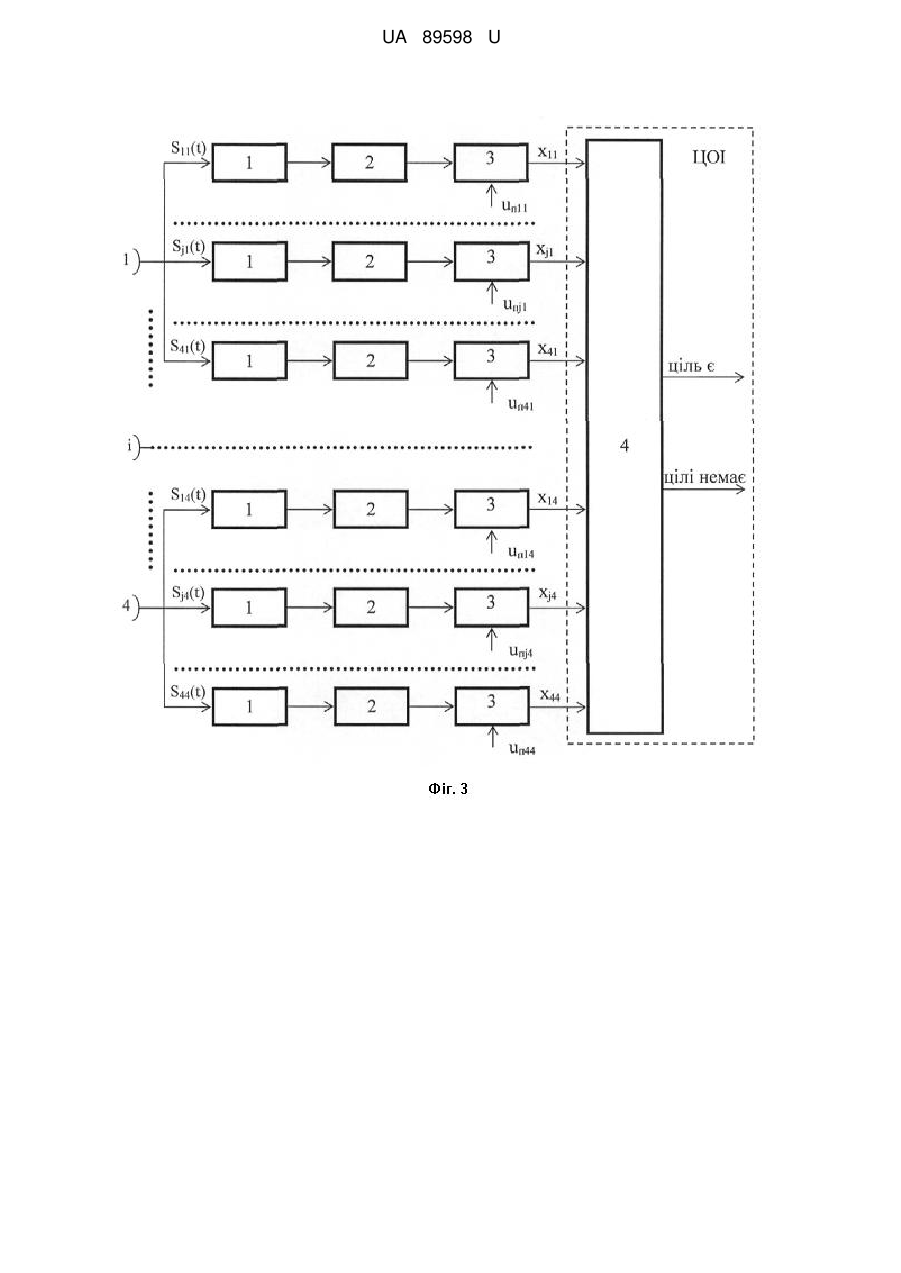
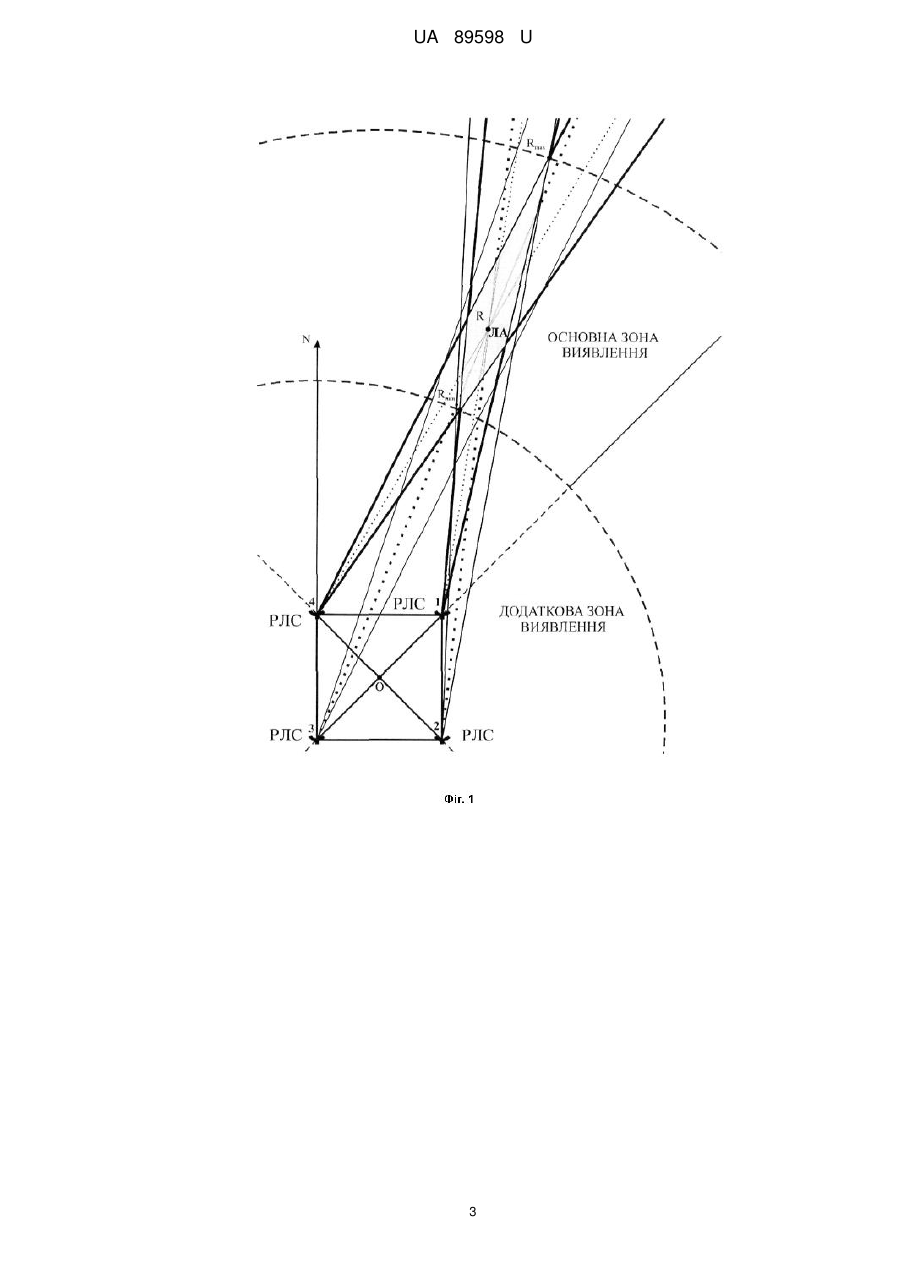
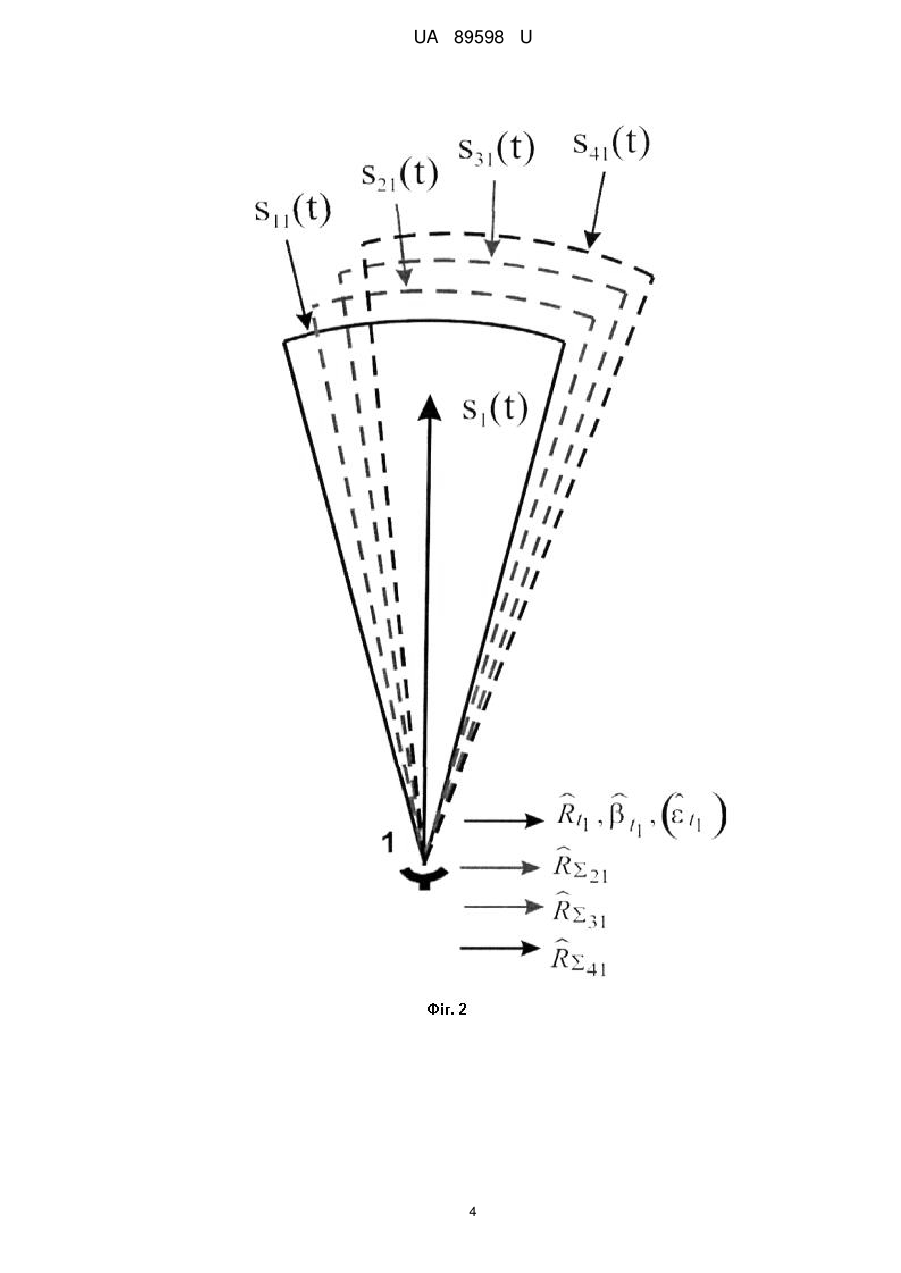
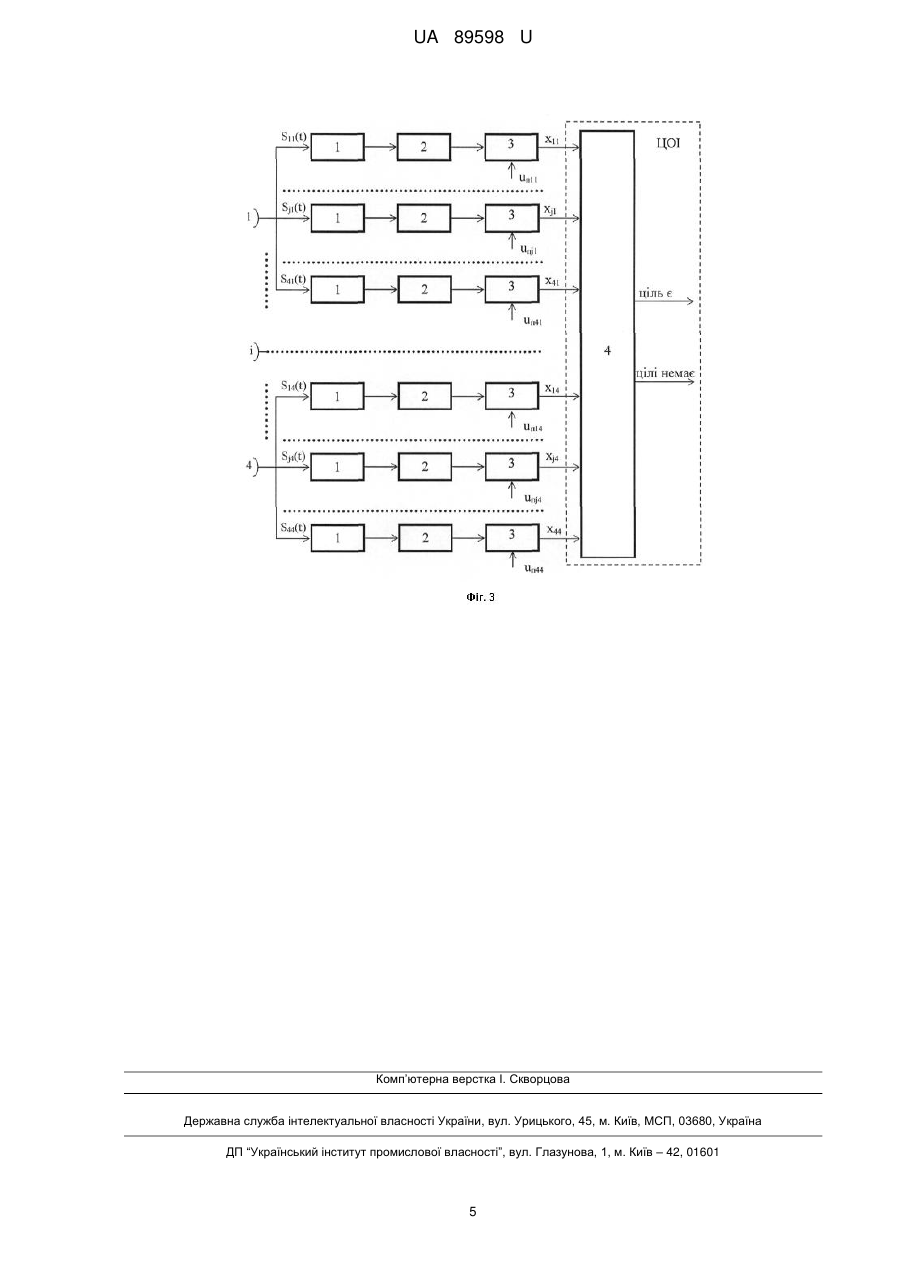
Реферат: Об'єкт корисної моделі: спосіб об'єднання радіолокаційної інформації в багатопозиційній радіолокаційній системі. Галузь застосування: радіолокація. Суть корисної моделі: спосіб об'єднання радіолокаційної інформації в багатопозиційній радіолокаційній системі полягає у застосуванні алгоритму децентралізованого виявлення при розв'язувальному правилі "n із n" ("і") та децентралізованого виявлення при оптимальному розв'язувальному правилі в чотирьох радіолокаційних станціях з повноповоротними антенами, які здійснюють синхронний послідовний огляд простору за азимутом та об'єднаними в багатопозиційну радіолокаційну систему з кооперативним прийомом сигналів. UA 89598 U (12) UA 89598 U UA 89598 U 5 10 15 20 25 30 35 40 45 50 55 60 Запропонована корисна модель належить до галузі радіолокації та може бути використана для підвищення якості радіолокаційної інформації первинних оглядових радіолокаційних станцій (РЛС) під час вирішення задач контролю повітряного простору або обслуговування повітряного руху. Найбільш близьким до запропонованого технічним рішенням, вибраним як прототип, є спосіб об'єднання двох РЛС в багатопозиційну радіолокаційну систему (БПРЛС) з кооперативним прийомом сигналів [1], який застосовує алгоритми централізованого та децентралізованого виявлення при оптимальному розв'язувальному правилі в двох РЛС з повноповоротними антенами та об'єднаними в БПРЛС з кооперативним прийомом сигналів. Недоліками способу-прототипу є те, що невирішена проблема узгодженого огляду простору та низька точність визначення кутових координат (азимуту та кута місця) ЛA при круговому огляді простору та застосуванні алгоритмів децентралізованого виявлення і оптимального розв'язувального правила. В основу корисної моделі поставлена задача створити спосіб об'єднання радіолокаційної інформації в багатопозиційній радіолокаційній системі для видачі радіолокаційної інформації в систему контролю повітряного простору або обслуговування повітряного руху на базі 4-х РЛС з повноповоротними антенами. Поставлена задача вирішується за рахунок того, що у спосіб-прототип, який застосовує алгоритми централізованого та децентралізованого виявлення при оптимальному розв'язувальному правилі в двох РЛС з повноповоротними антенами та об'єднаними в БПРЛС з кооперативним прийомом сигналів, додатково введено дві РЛС з повноповоротними антенами, які здійснюють синхронний послідовний огляд простору за азимутом та замість оптимального розв'язувального правила при застосуванні алгоритмів децентралізованого виявлення застосовується розв'язувальне правило "n із n" ("і"). Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у створенні первинного оглядового радіолокаційного багатопозиційного засобу, вирішенні проблеми узгодженого огляду простору, виявленні ЛA на необхідній дальності та підвищенні точності визначення кутових координат ЛA при круговій зоні відповідальності. На фіг. 1 приведена структура та зони виявлення БПРЛС на базі 4-ох РЛС з повноповоротними антенами та синхронному круговому огляді простору. На фіг. 2 приведений принцип прийому та обробки луно-сигналів від ЛА, що знаходиться в основній зоні виявлення БПРЛС з кооперативним прийомом. На фіг. 3 приведена структурна схема децентралізованого виявлювача в БПРЛС з кооперативним прийомом, де: 1 - узгоджений фільтр; 2 - детектор; 3 - пороговий пристрій; 4 суматор. Суть запропонованого способу об'єднання радіолокаційної інформації в багатопозиційній радіолокаційній системі полягає у застосуванні алгоритму децентралізованого виявлення при розв'язувальному правилі "n із n" ("і") та децентралізованого виявлення при оптимальному розв'язувальному правилі в чотирьох РЛС з повноповоротними антенами, які здійснюють синхронний послідовний огляд простору за азимутом та об'єднаними в БПРЛС з кооперативним прийомом сигналів. Робота запропонованого способу об'єднання радіолокаційної інформації в багатопозиційній радіолокаційній системі полягає у наступному. Узгоджений огляд простору здійснюється за рахунок синхронного послідовного огляду за азимутом 4-ма РЛС з повноповоротними антенами, що обумовлює розділення зони виявлення БПРЛС на дві: основну, яка обмежується областю одночасного знаходження головних променів ДС антен 4-х позицій та додаткову, яка обмежується ближньою межею основної зони і створюється за рахунок однопозиційного прийому луна-сигналів кожною PЛC в різні моменти часу (фіг. 1). Всі чотири PЛC одночасно випромінюють взаємно ортогональні сигнали, які, після відбиття від ЛА, надходять на входи кожного приймача (фіг. 2), розділяються та пропускаються через набір узгоджених фільтрів (фіг. 3). На вхід прийомних каналів кожної PЛC надходить сигнал, обумовлений опроміненням ЛА "своїм" передавачем (однопозиційний прийом), а у випадку знаходження ЛA в основній зоні виявлення БПРЛС - ще 3 сигнали, обумовлені опроміненням ЛА 3-ма іншими РЛС (бістатичний прийом). Незалежна обробка вимірювань в кожному каналі приймальної позиції реалізується за рахунок статистичної незалежності сигналів, що випромінюються різними РЛС, а в кожній з пар приймальних позицій БПРЛС - за рахунок вибору розміру баз, виходячи з умови забезпечення відсутності просторової кореляції флуктуацій [2]. Отримана на кожній позиції (РЛС) радіолокаційна інформація по лініям передачі даних (ЛПД) передається до центру обробки інформації (ЦОІ), який доцільно розміщувати у 1 UA 89598 U 5 10 15 20 віртуальному центрі системи (фіг. 1, точка О). При знаходженні ЛА в основній зоні виявлення БПРЛС в ЦОІ приймається рішення про наявність або відсутність ЛА (фіг. 3). Якщо виконується розв'язувальне правило "n із n", що гарантує виявлення луна-сигналів від ЛА в усіх відповідних елементах розрізнення кожного приймального каналу РЛС, то в ЦОІ здійснюється об'єднання отриманої радіолокаційної інформації шляхом застосування двоетапних алгоритмів формування результуючого одиничного заміру, що забезпечує високу результуючу точність визначення просторових координат ЛA [2], за рахунок автоматичної компенсації систематичних похибок визначення кутових координат. При знаходженні ЛА у додатковій зоні виявлення БПРЛС, рішення про наявність ЛА приймається кожною РЛС системи незалежно, а до ЦОІ передаються, отримані в результаті однопозиційного прийому, відмітки від ЛА, які далі ототожнюються з існуючими траєкторіями, екстрапольованими на момент часу отримання відмітки, що забезпечує підвищення темпу оновлення інформації та точності результуючої траєкторії [3]. Джерела інформації: 1. Pat. 6977610 United States, U.S. Class 342/126; 342/145; 342/189; 342/195; 342/59; 342/89; 342/90; 342/97. Multiple radar combining for increased range, radar sensitivity and angle accuracy / Brookner, et al.; assignee Raytheon Company (Waltham, MA). - Application № 10/684,081; filed 10.10.03; issued 20.12.05. 2. Черняк B.C. Многопозиционная радиолокация - Μ.: Радио и связь, 1993. - 416 с. 3. Кузьмин С.З. Цифровая радиолокация. Введение в теорию - К.: Издательство КВіЦ, 2000. - 428 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Спосіб об'єднання радіолокаційної інформації в багатопозиційній радіолокаційній системі, який застосовує алгоритм децентралізованого виявлення при оптимальному розв'язувальному правилі в двох радіолокаційних станціях (РЛС) з повноповоротними антенами та об'єднаними в багатопозиційну радіолокаційну систему з кооперативним прийомом сигналів, який відрізняється тим, що додатково введено дві PЛC з повноповоротними антенами, які здійснюють синхронний послідовний огляд простору за азимутом та застосовується розв'язувальне правило "n із n" ("і"). 2 UA 89598 U 3 UA 89598 U 4 UA 89598 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюKolomiitsev Oleksii Volodymyrovych
Автори російськоюКоломийцев Алексей Владимирович
МПК / Мітки
МПК: G01S 13/42
Мітки: багатопозиційний, радіолокаційний, інформації, спосіб, системі, об'єднання, радіолокаційної
Код посилання
<a href="https://ua.patents.su/7-89598-sposib-obehdnannya-radiolokacijjno-informaci-v-bagatopozicijjnijj-radiolokacijjnijj-sistemi.html" target="_blank" rel="follow" title="База патентів України">Спосіб об’єднання радіолокаційної інформації в багатопозиційній радіолокаційній системі</a>
Пристрій критерійної обробки радіолокаційної інформації
Номер патенту: 37866
Опубліковано: 15.05.2003
Автори: Немчин Олександр Федорович, МАЙ ІГОР ДМИТРОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, Мокеєв Юрій Геннадійович, Падалко Віктор Григорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Мирошниченко Михайло Іванович
МПК: G01S 7/40, G01S 13/526, G01S 13/00
Мітки: пристрій, радіолокаційної, критерійної, обробки, інформації
Формула / Реферат:
Пристрій критерійної обробки радіолокаційної інформації, який містить m блоків пам'яті та вирішувальний блок, який відрізняється тим, що він містить блок синхронізації з чотирма виходами, блок обнулення, вхід якого з'єднаний з першим виходом блока синхронізації, блок обробки, ланцюжок з m послідовно з'єднаних блоків пам'яті з об'єднаними між собою тактовими входами, підключеними до четвертого виходу блока синхронізації, вирішувальний блок...
Пристрій обробки сигналів радіолокаційної інформації
Номер патенту: 44415
Опубліковано: 15.12.2003
Автори: Траїлін Вячеслав Федорович, Немчин Олександр Федорович, Мокеєв Юрій Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ
МПК: G01S 7/28
Мітки: сигналів, інформації, пристрій, радіолокаційної, обробки
Формула / Реферат:
Пристрій обробки сигналів радіолокаційної інформації, що містить схему затримки з паралельно з'єднаних блоків пам'яті, перший та другий суматори та обчислювальний блок, який відрізняється тим, що схема затримки виконана з 2N-1 виходами, пристрій додатково містить блок синхронізації, з’єднаний зі схемою затримки, блоком обробки та з’єднаними між собою блоком накопичення і блоком обнулення, перший елемент НI, першу схему І, другий елемент НI,...
Спосіб регулювання та перевірки параметрів системи відображення радіолокаційної інформації та пристрій для його здійснення.
Номер патенту: 81728
Опубліковано: 25.01.2008
Автори: Мокеєв Юрій Геннадійович, Горбулін Володимир Павлович, Пресняк Ігор Степанович, Шило Сергій Володимирович, Немчин Олександр Федорович
МПК: G01S 7/04
Мітки: перевірки, системі, інформації, параметрів, здійснення, відображення, спосіб, радіолокаційної, пристрій, регулювання
Формула / Реферат:
1. Спосіб регулювання та перевірки параметрів системи відображення радіолокаційної інформації, за яким за допомогою органів панелі керування системи послідовно у часі перебирають усі можливі режими роботи системи, приймають та фіксують вихідні кодограми відповідного режиму роботи, для кожного із режимів роботи на відповідні порти та відеоадаптер системи видають сукупність тестових кодограм та аналогових сигналів, отримують на відеомоніторі...
Пристрій обробки сигналів радіолокаційної інформації
Номер патенту: 37865
Опубліковано: 15.05.2003
Автори: КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, Немчин Олександр Федорович, Мирошниченко Михайло Іванович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Мокеєв Юрій Геннадійович, МАЙ ІГОР ДМИТРОВИЧ, Падалко Віктор Григорович, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ
МПК: G01S 13/526, G01S 13/00, G01S 13/42
Мітки: пристрій, інформації, обробки, сигналів, радіолокаційної
Формула / Реферат:
1. Пристрій обробки сигналів радіолокаційної інформації, який містить блок накопичення та вирішувавльний блок, який відрізняється тим, що пристрій містить синхронізатор з чотирма виходами, блок обнулення, вхід якого з'єднаний з першим виходом синхронізатора, інформаційний вхід блока накопичення є входом пристрою, вхід обнулення з'єднаний з виходом блока обнулення, а тактовий вхід з'єднаний з другим виходом синхронізатора, блок обробки,...
Пристрій обробки радіолокаційної інформації
Номер патенту: 37867
Опубліковано: 15.05.2003
Автори: Каспирович Олександр Геннадійович, Немчин Олександр Федорович, Лаврентьєв Володимир Миколайович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мокеєв Юрій Генадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Мирошниченко Михайло Іванович, Падалко Віктор Григорович
МПК: G01S 7/40, G01S 13/526, G01S 13/00
Мітки: обробки, радіолокаційної, інформації, пристрій
Формула / Реферат:
1. Пристрій обробки радіолокаційної інформації, який містить q доплерівських фільтрових каналів з об'єднаними входами, що є входом пристрою, кожен з каналів включає доплерівський фільтр, вхід якого є входом доплерівського фільтрового каналу, лінію затримки з відводами, послідовно з’єднані схему порівняння і регістр затримки, порогову схему, вентильну схему, а також q-входову схему АБО і бінарний накопичувач, вихід якого є виходом пристрою,...
Наступний патент: Пристрій для оптимізації паралельної обробки великих масивів даних в кластерних системах
Випадковий патент: Вогнетривкий камінь