Спосіб вимірювання швидкості руху
Номер патенту: 91082
Опубліковано: 25.06.2014
Автори: Іванченко Іраїда Олександрівна, Будіянська Людмила Михайлівна, Лепіх Ярослав Ілліч, Сантоній Володимир Іванович
Формула / Реферат
Спосіб вимірювання швидкості руху, що полягає в тому, що поверхня досліджуваного об'єкта опромінюється світловим потоком і вимірюється відбите світлове випромінювання, при цьому випромінювач і фотоприймач встановлені на базовій відстані один від одного так, що їх поля зору перетинаються і утворюють зону чутливості, який відрізняється тим, що на чутливу поверхню фотоприймача встановлюється растрова ґратка, яка модулює вимірювальний сигнал, і вимірюється період або частота імпульсів, що виникають при зміні відстані між випромінювачем і відбивною поверхнею.
Текст
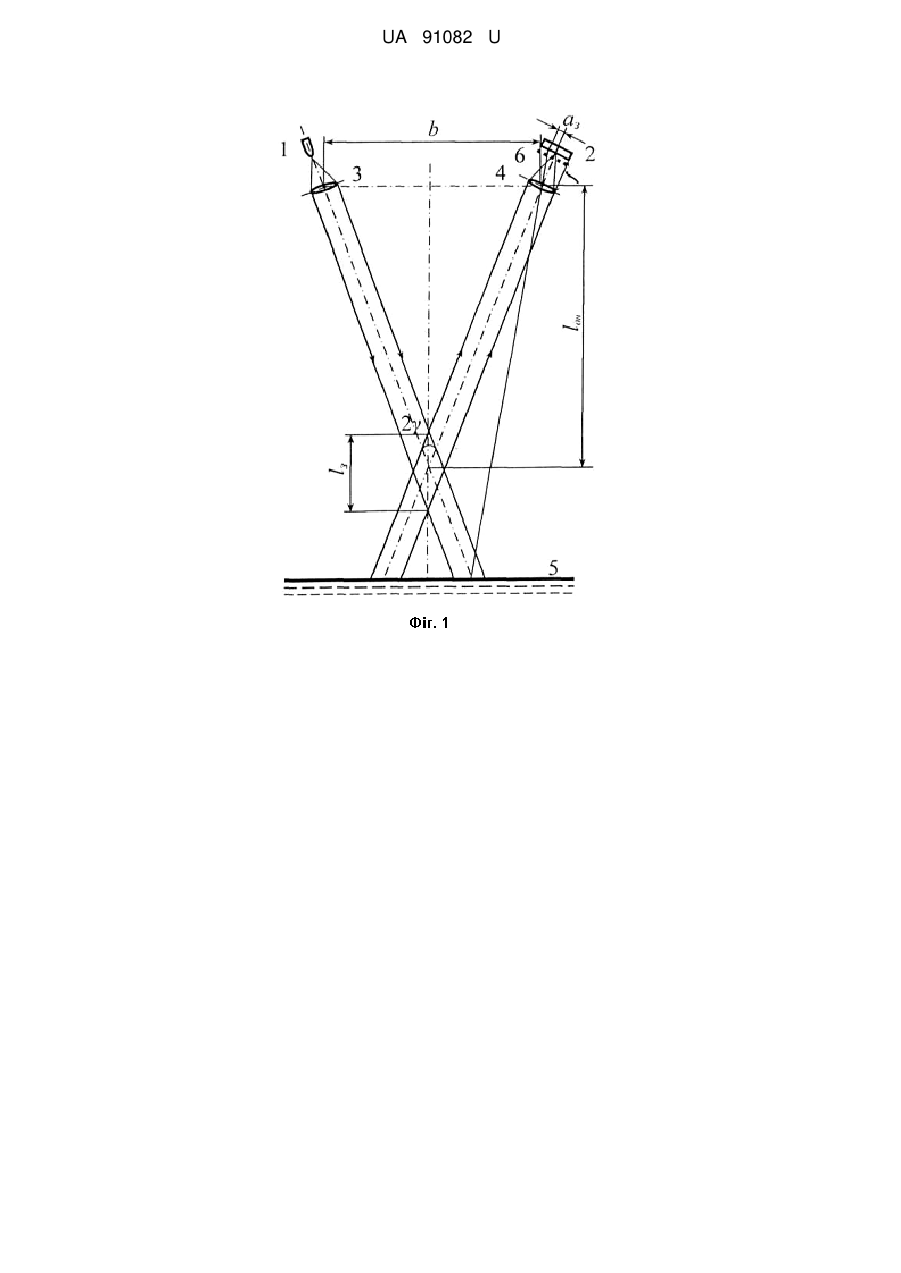
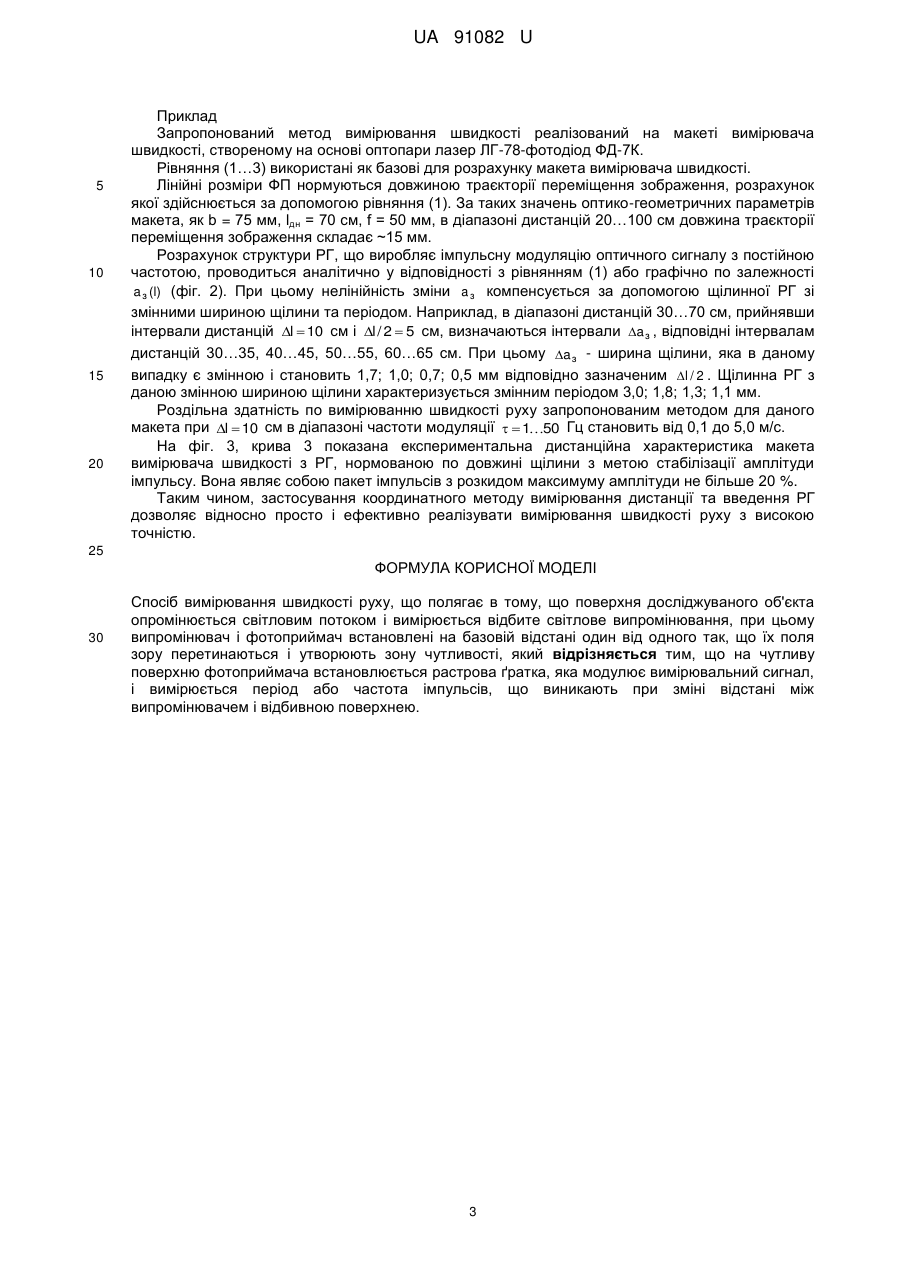
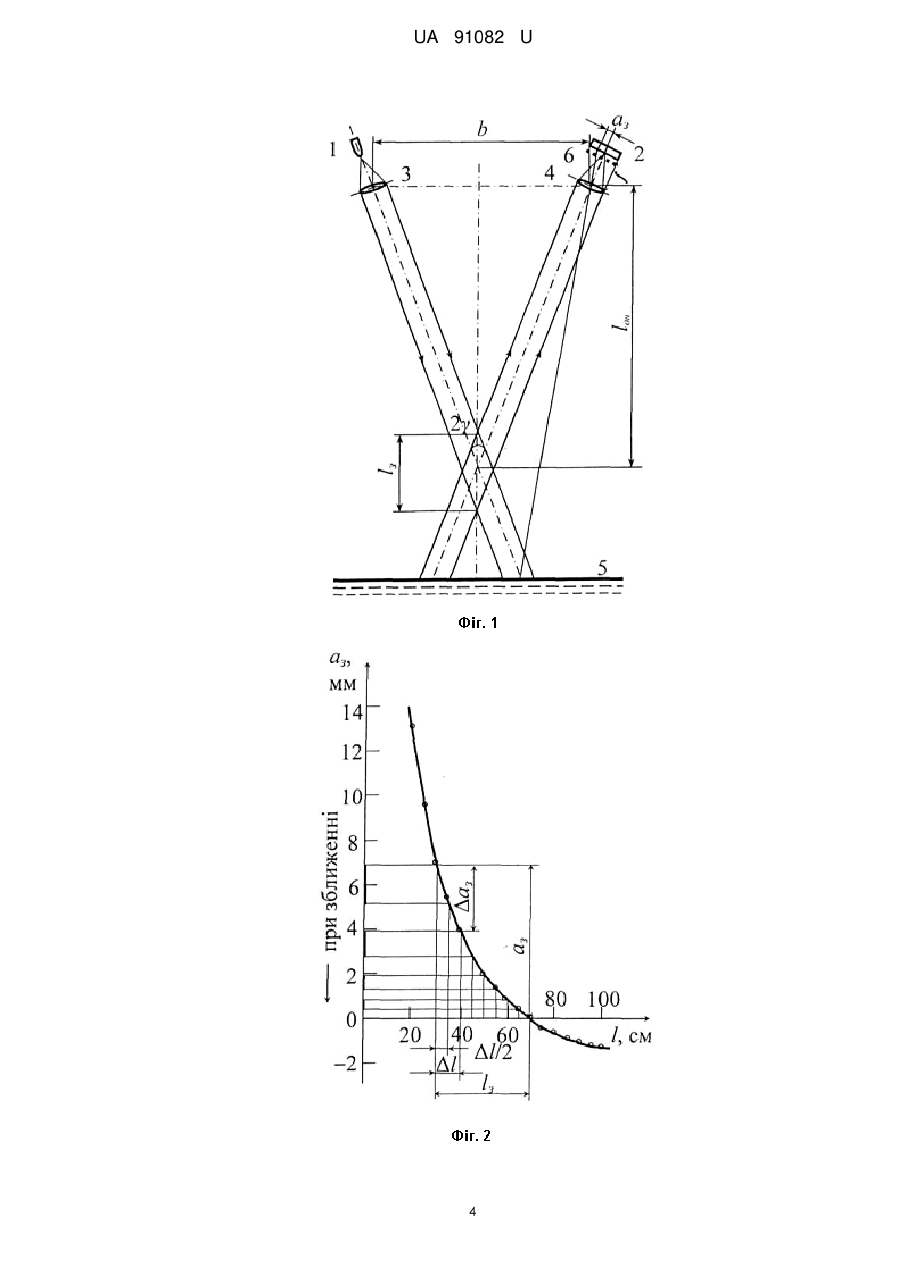
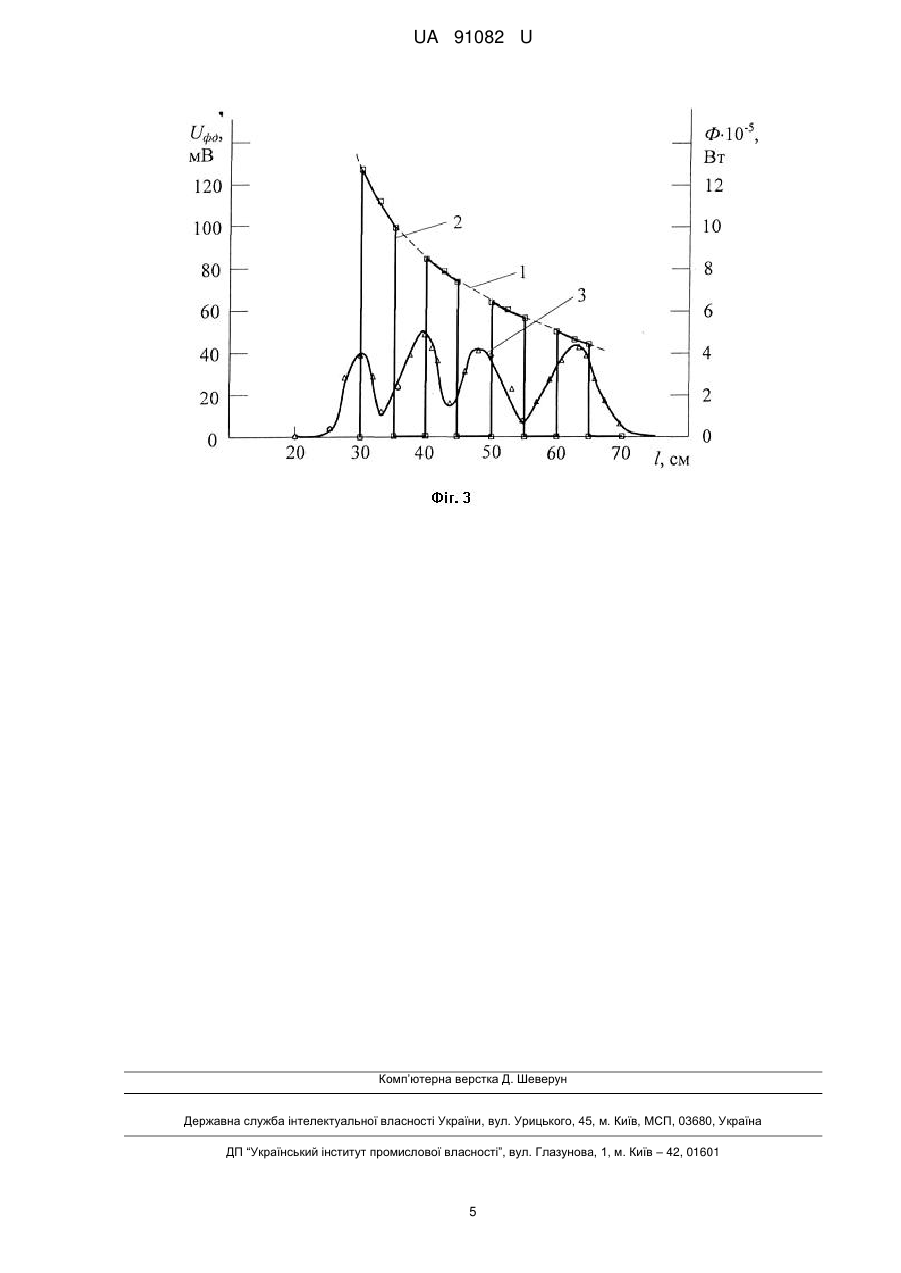
Реферат: Спосіб вимірювання швидкості руху полягає в тому, що поверхня досліджуваного об'єкта опромінюється світловим потоком і вимірюється відбите світлове випромінювання, при цьому випромінювач і фотоприймач встановлені на базовій відстані один від одного так, що їх поля зору перетинаються і утворюють зону чутливості. На чутливу поверхню фотоприймача встановлюється растрова ґратка, яка модулює вимірювальний сигнал, і вимірюється період або частота імпульсів, що виникають при зміні відстані між випромінювачем і відбивною поверхнею. UA 91082 U (54) СПОСІБ ВИМІРЮВАННЯ ШВИДКОСТІ РУХУ UA 91082 U UA 91082 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до оптичних методів вимірювання швидкості руху і може використовуватися у приладобудуванні, космічній техніці, транспорті та машинобудуванні у пристроях дистанційного вимірювання швидкості наближення/віддалення, попередження зіткнень та стикування різних об'єктів. Досягнутий в даній області рівень техніки відображений в наступних публікаціях. Відомий "Способ лазерной локации заданной области пространства и устройство для его осуществления" [пат. РФ 2375724 G01S 17/02, публ. 10.12.2009], в якому зона чутливості лазерного локатора створюється пересічними полями зору передавальної та приймальної оптичних систем, встановлених на базовій відстані один від іншого, приймається відбитий сигнал від об'єкта при попаданні його в зону чутливості, за яким судять про його місцезнаходження. Недоліками цього способу є складність методу створення зони огляду простору за допомогою пірамідоподібних розгорток полів зору випромінювача (В) і фотоприймача (ФП), спрямованого на прискорення пошуку, ідентифікації та супроводу високошвидкісних об'єктів у широкому діапазоні відстаней і тілесних кутів, і відсутність рішень по вимірюванню швидкості переміщення цих об'єктів. Найближчим з відомих рішень, взятим за прототип, є "Устройство для измерения скорости движения объектов" [авт. св. СССР 241800, G01S 17/58, публ. 01.01.1969], в якому вимір швидкості здійснюється за допомогою дифракційної ґратки, яка модулює відбите від поверхні, що переміщується, випромінювання. Частота модуляції залежить від кроку ґратки та швидкості переміщення контрольованого об'єкта. Обертанням ґратки відносно осі кріплення змінює її крок відносно напрямку прийому випромінювання, що призводить до зміни частоти сигналу на виході ФП, відповідній швидкості руху. Недоліком даного способу є складність методу і конструкції для його реалізації, оскільки використовуються складні оптичні елементи та рухомі механізми для їх обертання з метою зміни кроку у напрямку прийому відбитого випромінювання. Задача, на розв'язання якої спрямована запропонована корисна модель, є вимірювання швидкості руху шляхом використання растрового методу модуляції вимірювального сигналу і вимірювання періоду або частоти імпульсів, що виникають при зміні дистанції. Поставлена задача розв'язується методом вимірювання швидкості руху, який полягає в тому, що поверхня досліджуваного об'єкта опромінюється світловим потоком і вимірюється відбите світлове випромінювання, при цьому В і ФП встановлені на базовій відстані один від одного так, що їх поля зору перетинаються і утворюють зону чутливості, і відрізняється тим, що на чутливу поверхню ФП встановлюється растрова ґратка (РГ), яка модулює вимірювальний сигнал, і вимірюється період або частота імпульсів, які виникають при зміні відстані між В і відбивною поверхнею (ВП). Загальними ознаками прототипу і запропонованого методу вимірювання швидкості руху є наступні: прототип і запропонований метод передбачають опромінення досліджуваної поверхні світловим потоком і вимірювання відбитого випромінювання, а також використання модулюючої ґратки. Відмітними ознаками запропонованого методу вимірювання швидкості руху від прототипу є те, що у прототипі модулююча дифракційна гратка обертається та змінює крок у напрямку прийому випромінювання, при цьому вимірювана швидкість руху відповідає частоті сигналу ФП, а в запропонованому методі модулююча РГ нерухома і швидкість руху вимірюється через час, рівний тривалості фотоприймальних імпульсів. На фіг. 1 приведена оптико-геометрична схема базового методу вимірювання дистанції. На фіг. 2 показана дистанційна залежність координати а3 центру світлової плями на майданчику ФП. На фіг. 3 показані дистанційні характеристики вимірювача швидкості з РГ. Здійснюється метод наступним чином. Рівномірний рух у межах дистанції l характеризується швидкістю руху v , яка дорівнює частині дистанції l , прохідної в одиницю часу t , тобто v l / t . Виходячи з цього процес вимірювання v ділиться на дві складові - дистанційну і часову. Дистанційні вимірювання засновані на базовому методі, оптико-геометрична схема якого наведена на фіг. 1. На фіг. 1: 1 - випромінювач (В), 2 - фотоприймач (ФП), 3 - оптична система ВП, 4 - оптична система ФП, 5 - відбивна поверхня (ВП), 6 - растрова гратка (РГ), b - вимірювальна база, 2 кут перетину осей приймально-випромінювальних оптичних систем, f - фокусна відстань оптичних систем, l дн - дальність настройки, l з - протяжність зони чутливості, a з - координата зображення на поверхні ФП. 1 UA 91082 U 5 10 Схема методу містить випромінювач 1 і фотоприймач 2, що утворюють відбивну оптопару з відкритим оптичним каналом, і відповідні їм оптичні системи 3 і 4, розташовані на базовій відстані b один від одного. У результаті перетину полів зору випромінювача 1 і фотоприймача 2 в просторі перед оптопарою формується зона чутливості, в якій фотоприймач 2 приймає випромінювання, відбите відбивної поверхнею 5. Дистанційні вимірювання проводяться координатним методом, заснованим на зміні координати зображення a з на чутливій поверхні фотоприймача 2 при зміні дистанції l . Залежність a з від дистанції l до об'єкта та інших оптико-геометричних параметрів схеми вимірювань, позначених на фіг. 1, описується виразом [Иванченко И.А., Сантоний В.И., Будиянская Л.М. Дистанционный оптико-электронный датчик с растровой решеткой // Технология и конструирование в электронной аппаратуре. - 2005. - № 4. - С. 31-34] aз 15 20 25 bf (l l дн ) l l дн b tg(l l дн ) . (1) Із рівняння (1) та графіка функції a з (l) а3 (фіг. 2) випливає, що діапазону дистанцій l з відповідає траєкторія переміщення зображення a з . Це дозволяє представити майданчик ФП у вигляді дистанційної шкали. Враховуючи прямолінійність траєкторії a з , градуювання поверхні ФП в одиницях дистанції l реалізує щілинна растрова ґратка 6 (фіг. 1), накладена на майданчик фотоприймача 2 і модулююча світловий потік Ф на його вході. В залежності від положення зображення растрова ґратка пропускає або затримує відбитий світловий потік, чому відповідає значення сигналу 1 або 0. Рівномірна шкала дистанції створюється, якщо РГ здійснює цикл пропускання-затінення випромінювання за рівні інтервали дистанції l . При цьому половина інтервалу l / 2 відповідає половині циклу. Світловий потік Ф на вході ФП підкоряється закону зворотних квадратів дистанцій [Якушенков Ю.Г. Теория и расчет оптико-электронных приборов. - М.: Сов. Радио, 1980] Ф c 2l о LA вх A 2 / l 2 , (2) де c і о - коефіцієнти пропускання середовища та оптичних систем відповідно; 30 35 коефіцієнт відбиття ВП; L - яскравість В; A вх - площа вхідної апертури ФП; A 2 - площа світлової плями на ВП. Рівняння (2) є характеристикою місця розташування досліджуваного об'єкта, тобто його дистанційною характеристикою, і описується безперервною функцією виду f (1/ l 2 ) (фіг. 3, крива 1). Введення РГ в структуру фотоприйому змінює вигляд дистанційної характеристики Ф(l) , відповідної рівнянню (2), в результаті зміни коефіцієнта пропускання о приймального об'єктива наступним чином [Мирошников М.М. Теоретические основы оптико-электронных приборов. - Л.: Машиностроение, 1983] (при l l / 2) . (3) о о 0 (при l / 2 l l) 40 45 50 Застосування РГ перетворює безперервну функцію f (1/ l 2 ) в послідовність імпульсів, кількість, періодичність та дистанційне розташування яких визначаються структурою РГ (фіг. 3, крива 2). Перетворена в імпульсну форму дистанційна характеристика дозволяє виміряти часову складову v наступним чином. Імпульсний сигнал, сформований за допомогою РГ, характеризується періодом T l / v і частотою v / l . Якщо приймальний сигнал складається з імпульсів числом n з періодом повторення T , то час проходження t дистанції l виражається як t n T . (4) З урахуванням рівняння (4) швидкість руху v виражається як v l / n T aбo v l / n . (5) Виходячи з рівнянь (5), апріорні дані про співвідношення між дистанцією і структурою ґратки в сукупності з виміряним періодом імпульсу T або частотою модуляції дозволяють визначити швидкість руху. 2 UA 91082 U 5 10 15 20 Приклад Запропонований метод вимірювання швидкості реалізований на макеті вимірювача швидкості, створеному на основі оптопари лазер ЛГ-78-фотодіод ФД-7К. Рівняння (1…3) використані як базові для розрахунку макета вимірювача швидкості. Лінійні розміри ФП нормуються довжиною траєкторії переміщення зображення, розрахунок якої здійснюється за допомогою рівняння (1). За таких значень оптико-геометричних параметрів макета, як b = 75 мм, lдн = 70 см, f = 50 мм, в діапазоні дистанцій 20…100 см довжина траєкторії переміщення зображення складає ~15 мм. Розрахунок структури РГ, що виробляє імпульсну модуляцію оптичного сигналу з постійною частотою, проводиться аналітично у відповідності з рівнянням (1) або графічно по залежності a з (l) (фіг. 2). При цьому нелінійність зміни a з компенсується за допомогою щілинної РГ зі змінними шириною щілини та періодом. Наприклад, в діапазоні дистанцій 30…70 см, прийнявши інтервали дистанцій l 10 см і l / 2 5 см, визначаються інтервали a з , відповідні інтервалам дистанцій 30…35, 40…45, 50…55, 60…65 см. При цьому a з - ширина щілини, яка в даному випадку є змінною і становить 1,7; 1,0; 0,7; 0,5 мм відповідно зазначеним l / 2 . Щілинна РГ з даною змінною шириною щілини характеризується змінним періодом 3,0; 1,8; 1,3; 1,1 мм. Роздільна здатність по вимірюванню швидкості руху запропонованим методом для даного макета при l 10 см в діапазоні частоти модуляції 150 Гц становить від 0,1 до 5,0 м/с. На фіг. 3, крива 3 показана експериментальна дистанційна характеристика макета вимірювача швидкості з РГ, нормованою по довжині щілини з метою стабілізації амплітуди імпульсу. Вона являє собою пакет імпульсів з розкидом максимуму амплітуди не більше 20 %. Таким чином, застосування координатного методу вимірювання дистанції та введення РГ дозволяє відносно просто і ефективно реалізувати вимірювання швидкості руху з високою точністю. 25 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 Спосіб вимірювання швидкості руху, що полягає в тому, що поверхня досліджуваного об'єкта опромінюється світловим потоком і вимірюється відбите світлове випромінювання, при цьому випромінювач і фотоприймач встановлені на базовій відстані один від одного так, що їх поля зору перетинаються і утворюють зону чутливості, який відрізняється тим, що на чутливу поверхню фотоприймача встановлюється растрова ґратка, яка модулює вимірювальний сигнал, і вимірюється період або частота імпульсів, що виникають при зміні відстані між випромінювачем і відбивною поверхнею. 3 UA 91082 U 4 UA 91082 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюIvanchenko Iraida Oleksandrivna, Santonii Volodymyr Ivanovych, Budianska Liudmyla Mykhailivna, Lepikh Yaroslav Illich
Автори російськоюИванченко Ираида Александровна, Сантоний Владимир Иванович, Будиянская Людмила Михайловна, Лепих Ярослав Ильич
МПК / Мітки
МПК: G01S 17/02, G01S 17/58
Мітки: спосіб, швидкості, вимірювання, руху
Код посилання
<a href="https://ua.patents.su/7-91082-sposib-vimiryuvannya-shvidkosti-rukhu.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання швидкості руху</a>
Спосіб вимірювання швидкості руху зовнішнього об’єкта
Номер патенту: 49407
Опубліковано: 26.04.2010
Автори: Васильєв Олександр Павлович, Параніч Віктор Петрович, Бурачек Всеволод Германович, Бєлятинський Андрій Олександрович, Беленок Вадим Юрійович
МПК: G01S 13/92, G01P 3/42
Мітки: швидкості, вимірювання, об'єкта, спосіб, руху, зовнішнього
Формула / Реферат:
Спосіб вимірювання швидкості руху зовнішнього об'єкта, заснований на методі імпульсної локації об'єкта, який відрізняється тим, що при прийомі відбитого електромагнітного випромінювання змішану частоту імпульсів прямого й відбитого випромінювання пропускають через високочастотний фільтр, настроєний на подвійну частоту випромінювання, при цьому фіксують моменти появи подвійної частоти випромінювання й формують сигнали в ці моменти, які...
Спосіб вимірювання швидкості руху зовнішнього об’єкта
Номер патенту: 91661
Опубліковано: 10.08.2010
Автори: Беленок Вадим Юрійович, Параніч Віктор Петрович, Васильєв Олександр Павлович, Бурачек Всеволод Германович, Бєлятинський Андрій Олександрович
МПК: G01S 13/58
Мітки: зовнішнього, руху, спосіб, швидкості, об'єкта, вимірювання
Формула / Реферат:
Спосіб вимірювання швидкості руху зовнішнього об'єкта, заснований на методі імпульсної локації об'єкта, який відрізняється тим, що при прийомі відбитого електромагнітного випромінювання змішану частоту імпульсів прямого й відбитого випромінювання пропускають через високочастотний фільтр, настроєний на подвійну частоту випромінювання, при цьому фіксують моменти появи подвійної частоти випромінювання й формують сигнали в ті моменти, які...
Спосіб вимірювання швидкості руху і глибини занурення кліті при наземній установці підйомної машини
Номер патенту: 44406
Опубліковано: 12.10.2009
Автори: Харченко Володимир Петрович, Ларін Віталій Юрійович, Квасніков Володимир Павлович
МПК: G01C 23/00
Мітки: наземний, кліті, установці, вимірювання, глибини, занурення, руху, підйомної, спосіб, швидкості, машини
Формула / Реферат:
Спосіб вимірювання швидкості руху і глибини занурення кліті при наземній установці підйомної машини, заснований на вимірюванні оборотів колеса, який відрізняється тим, що два чутливі елементи феромагнітного первинного перетворювача встановлюють один над одним на відстані не менше ширини осі колеса підйому, на віддаленні від площини колеса, достатньому для спрацьовування чутливих елементів феромагнітного перетворювача, і на відстані від вала...
Універсальний спосіб вимірювання швидкості руху і глибини занурення кліті підйомної машини
Номер патенту: 101223
Опубліковано: 11.03.2013
Автори: Ларін Віталій Юрійович, Квасніков Володимир Павлович, Харченко Володимир Петрович
МПК: G01C 23/00
Мітки: руху, спосіб, швидкості, кліті, вимірювання, підйомної, занурення, глибини, універсальний, машини
Формула / Реферат:
Універсальний спосіб вимірювання швидкості руху і глибини занурення кліті підйомної машини, який заснований на вимірюванні кількості та тривалості імпульсів від феромагнітного первинного перетворювача, який відрізняється тим, що приводні магнітні елементи закріплюють на однаковій відстані один від одного на поверхні стрічки з немагнітного матеріалу, яку розташовують по всій довжині ствола шахти, а два чутливі елементи феромагнітного...
Пристрій для вимірювання довжини та швидкості руху виробів
Номер патенту: 70581
Опубліковано: 25.07.2007
Автори: Лютов Ігор Валерійович, Бондар Анатолій Юрьйович, Маслак Віктор Миколайович, Баранов Юрій Вячеславович
МПК: G01B 7/02
Мітки: вимірювання, пристрій, виробів, швидкості, руху, довжини
Формула / Реферат:
1. Пристрій для вимірювання довжини і швидкості руху виробів, який містить датчик довжини, з'єднаний входом з першим виходом джерела стабілізованих напруг, другий вихід якого підключений до першого входу блока індикації, а виходом - із входом формувача імпульсів, комутатор, вихід якого приєднаний до приводу руху виробу, який відрізняється тим, що в нього введені контролер, який складається із з'єднаних між собою центрального процесорного...
Попередній патент: Спосіб моделювання катаракти
Наступний патент: Спосіб конверсії мулових відходів біологічної очистки комунальних стоків у добрива
Випадковий патент: Диференціатор теплових сигналів