Універсальний спосіб вимірювання швидкості руху і глибини занурення кліті підйомної машини
Номер патенту: 101223
Опубліковано: 11.03.2013
Автори: Харченко Володимир Петрович, Квасніков Володимир Павлович, Ларін Віталій Юрійович
Формула / Реферат
Універсальний спосіб вимірювання швидкості руху і глибини занурення кліті підйомної машини, який заснований на вимірюванні кількості та тривалості імпульсів від феромагнітного первинного перетворювача, який відрізняється тим, що приводні магнітні елементи закріплюють на однаковій відстані один від одного на поверхні стрічки з немагнітного матеріалу, яку розташовують по всій довжині ствола шахти, а два чутливі елементи феромагнітного первинного перетворювача, які розміщують безпосередньо на корпусі кліті, встановлюють один над одним на відстані не менше ширини приводного елемента, та на відстані від стрічки з приводними елементами, достатній для гарантованого спрацювання чутливих елементів феромагнітного перетворювача, вихідні сигнали якого через передавач транслюють бездротовим способом до приймача, який розташовують у верхній точці ствола шахти, і після перетворення ці сигнали послідовно подають на блоки визначення напряму руху, вимірювання глибини занурення, вимірювання швидкості руху та через блок виведення вимірювальної інформації передають на блок індикаторного пристрою локального відображення в цифровій формі інформації про швидкість руху кліті і глибину її занурення, а також виводять інформацію в обчислювальний блок для обробки і зберігання.
Текст
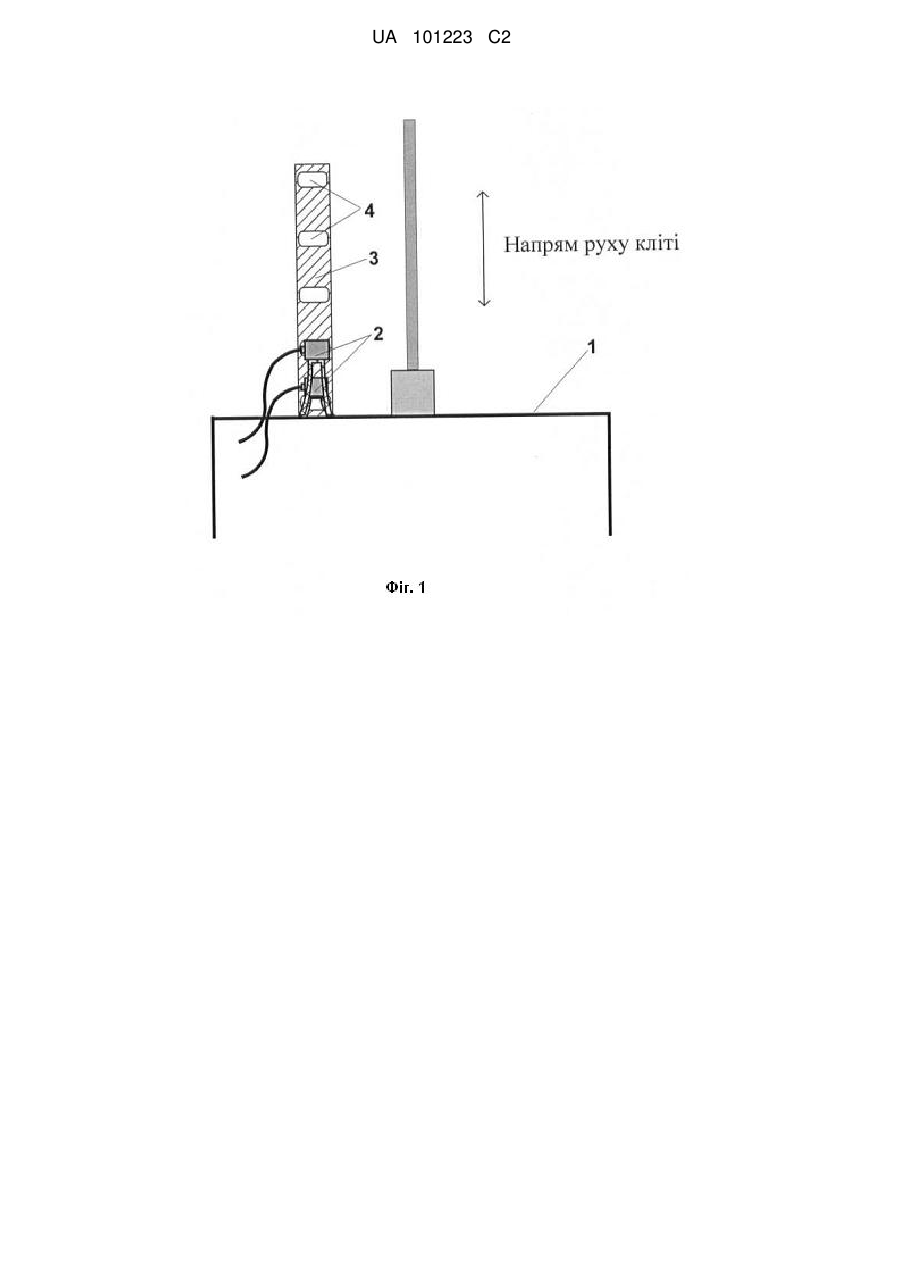
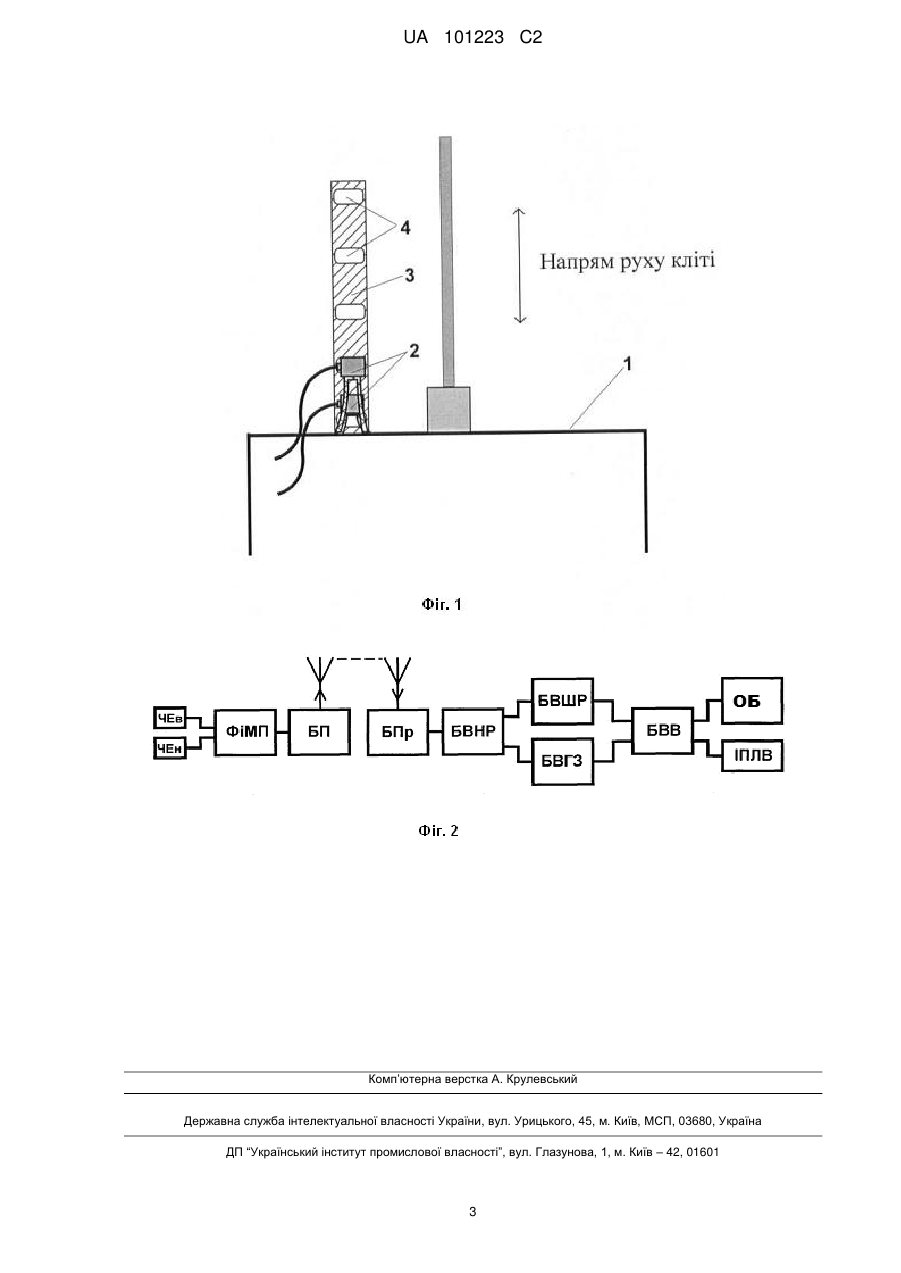
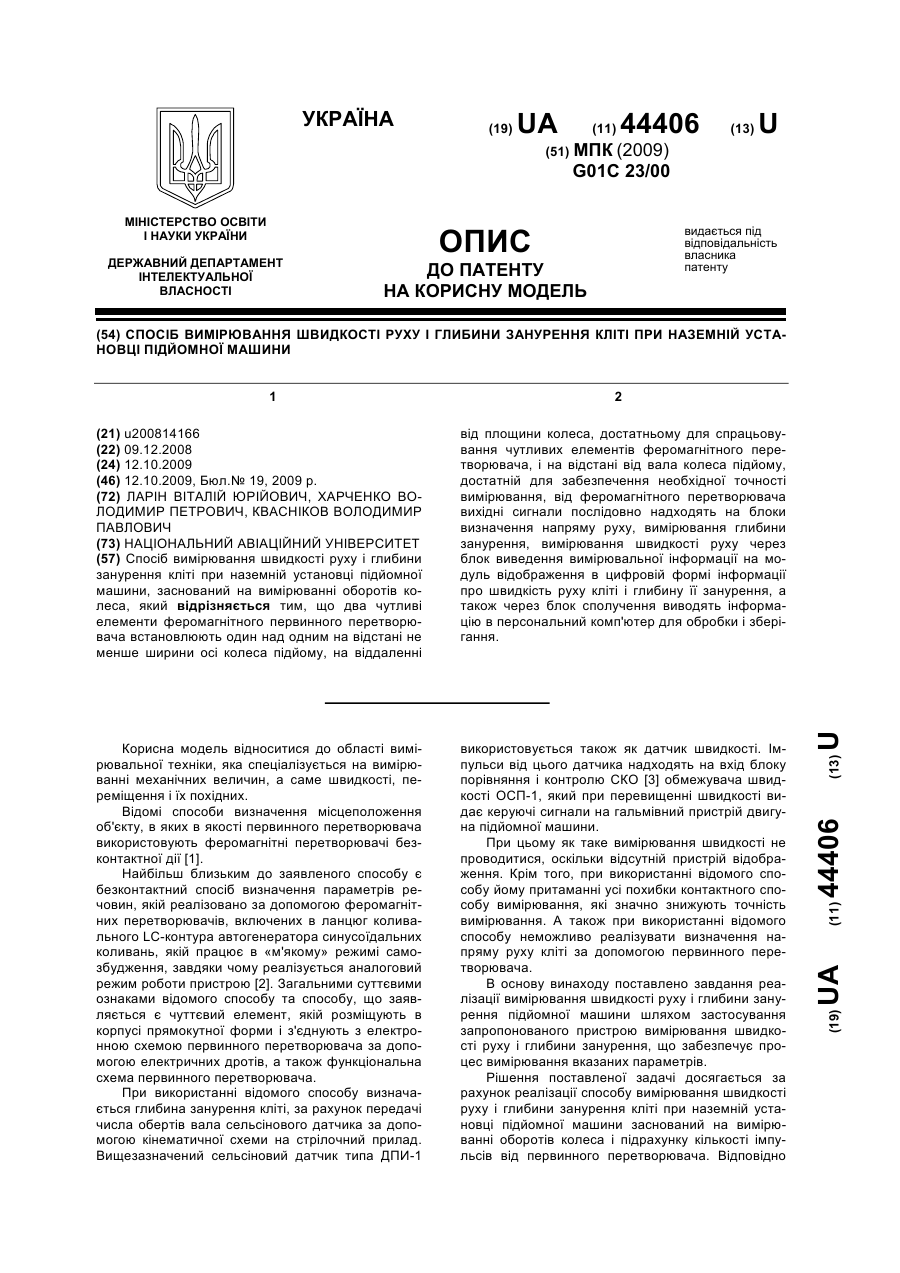
Реферат: Універсальний спосіб вимірювання швидкості руху і глибини занурення кліті підйомної машини належить до техніки вимірювання механічних величин. Для вимірювання швидкості і глибини занурення використовується набір приводних елементів, розташованих по всій довжині ствола шахти, та пристрій вимірювання швидкості руху і глибини занурення кліті. Пара чутливих елементів феромагнітного перетворювача пристрою по черзі спрацьовує при перетині приводним елементом зони розповсюдження магнітного потоку чутливого елемента. З виходу феромагнітного перетворювача вимірювальні сигнали через передавач бездротовим способом потрапляють на приймач, розташований на поверхневій частині ствола шахти. Після перетворення інформація про швидкість і глибину занурення надходить у вторинні перетворюючі блоки визначення напряму руху, вимірювання глибини занурення, часових інтервалів і через блок виведення вимірювальної інформації на блок цифрової індикації, а також надходить до обчислювального блока для обробки і зберігання. Технічним результатом є забезпечення високої точності вимірювання глибини занурення кліті підйомної машини і швидкості її руху, незалежно від типу установки підйомної машини на шахті. UA 101223 C2 (12) UA 101223 C2 UA 101223 C2 5 10 15 20 25 30 35 40 45 50 55 Відомі способи визначення місцеположення об'єкта, в яких як первинний перетворювач використовують феромагнітні перетворювачі безконтактної дії [1], а також спосіб визначення параметрів речовин [2]. Найбільш близьким до заявленого способу є спосіб вимірювання швидкості руху і глибини занурення кліті підйомної машини при наземній установці підйомної машини, який реалізовано за допомогою феромагнітних перетворювачів, встановлених на поверхні обслуговуючого майданчика біля колеса підйому. Зчитування вимірювальної інформації відбувається при обертанні колеса підйому, спиці якого виконують роль приводного елемента, що перетинає зону розповсюдження магнітного потоку котушок індуктивності феромагнітних перетворювачів, викликаючи при цьому зрив генерації коливань LC-генератора, в схему якого включені котушки первинних перетворювачів [3]. Загальними суттєвими ознаками відомого способу та способу, що заявляється, є чуттєвий елемент, який розміщують в корпусі прямокутної форми і з'єднують з електронною схемою первинного перетворювача за допомогою електричних дротів, а також функціональна схема первинного перетворювача. При використанні відомого способу визначається глибина занурення кліті, за рахунок передачі числа обертів вала сельсинового датчика за допомогою кінематичної схеми на стрілковий прилад. Вищезазначений сельсиновий датчик типу ДПИ-1 використовується також як датчик швидкості. Імпульси від цього датчика надходять на вхід блока порівняння і контролю СКО [4] обмежувача швидкості ОСП-1, який при перевищенні швидкості видає керуючі сигнали на гальмівний пристрій двигуна підйомної машини. При цьому вимірювання швидкості не проводиться, оскільки відсутній пристрій відображення. Крім того, при використанні відомого способу йому притаманні усі похибки контактного способу вимірювання, які значно знижують точність вимірювання. А також при використанні відомого способу неможливо реалізувати визначення напряму руху кліті за допомогою первинного перетворювача. В основу винаходу поставлено задачу реалізації вимірювання швидкості руху і глибини занурення підйомної машини шляхом застосування запропонованого способу встановлення чутливих та приводних елементів та пристрою вимірювання швидкості руху і глибини занурення, що забезпечує процес вимірювання вказаних параметрів. Вирішення поставленої задачі досягається за рахунок реалізації універсального способу вимірювання швидкості руху і глибини занурення кліті як при наземній, так і при баштовій установці підйомної машини, який заснований на підрахунку кількості та тривалості імпульсів від первинного перетворювача. Відповідно до винаходу приводні магнітні елементи, у вигляді пластин, які закріплені на однаковій відстані один від одного на поверхні стрічки з немагнітного матеріалу, яку розташовують по всій довжині ствола шахти, а два чутливі елементи феромагнітного первинного перетворювача, розміщені безпосередньо на корпусі кліті, встановлюють один над одним на відстані не менше ширини приводного елемента, на відстані від стрічки з приводними елементами, достатній для гарантованого спрацьовування чутливих елементів феромагнітного перетворювача, вихідні сигнали якого через передавач транслюють бездротовим способом до приймача, який розташовано на поверхневій частині ствола шахти і після перетворення ці сигнали послідовно подають на блоки визначення напряму руху, вимірювання глибини занурення, вимірювання швидкості руху через блок виведення вимірювальної інформації на модуль відображення в цифровій формі інформації про швидкість руху кліті і глибину його занурення, а також через блок сполучення виводять інформацію в персональний комп'ютер для обробки і зберігання. Запропонований спосіб забезпечує вимірювання глибини занурення кліті підйомної машини і вимірювання швидкості її руху незалежно від способу установки підйомної машини на шахті за рахунок того, що кількісна інформація про глибину знаходження кліті підйомної машини в стволі шахти та швидкість її руху у відповідних одиницях виміру, надходить до блока відображення, що дає можливість оцінювати ситуацію і приймати відповідні рішення. На фіг. 1 представлена схема установки первинних перетворювачів. Безпосередньо на каркасі кліті (1) закріплюють два чутливих елементи феромагнітного перетворювача (2), які побудовані на феритовому осерді з намотаними на них котушками індуктивності, розміщеними в захисних корпусах і залитими термостійким епоксидним компаундом. Відкриту сторону корпусу обертають у бік тої стінки ствола шахти, де розташовують стрічку з немагнітного матеріалу (3) з приводними магнітними елементами прямокутної форми (4). Розміри приводного елемента повинні бути такими, щоб він забезпечував впевнене спрацьовування чутливого елемента, тобто викликати зрив генерації коливань генератора в момент перетинання приводним елементом магнітного потоку, створюваного котушкою індуктивності чутливого елемента. 1 UA 101223 C2 5 10 15 20 25 30 35 40 Для забезпечення вимірювання стрічку з приводними елементами розташовують на усьому шляху переміщення кліті. Чутливі елементи встановлюють так, щоб не допускати одночасного спрацьовування обох чутливих елементів. Ця схема установки дозволяє виконати контроль напряму руху кліті, оскільки при різному напрямі руху (вгору або вниз) першим спрацьовуватиме верхній або нижній елемент (2). Для вимірювання швидкості і глибини занурення кліті достатньо було і одного чутливого елемента, але оскільки потрібне визначення напряму її руху в стволі, то використовують два чутливих елементи. Структурна схема пристрою наведена на фіг. 2. Чутливі елементи включають в схему феромагнітного перетворювача ФІМП. З виходу феромагнітного перетворювача сигнали надходять в блок передавача (БП), в якому відбувається перетворення вимірювальних імпульсів в радіоімпульси, які через антену передавача по радіоканалу зв'язку надходять у блок приймача (БПр) де відбувається зворотне перетворення радіоімпульсів в імпульси вимірювальної інформації. Далі ця інформація потрапляє у блок визначення напряму руху (БВНР). Напрям руху визначають по першочерговості спрацьовування нижнього ЧЕн (при русі кліті вниз), або верхнього ЧЕв (при русі кліті вгору) чутливого елементу. Черговість спрацьовування чутливих елементів ФІМП перетворюють в блоці визначення напряму руху в рівень логічного нуля або одиниці. Також в цьому блоці перетворюють два імпульсних сигнали, які надходять від ФІМП, в один для зручності подальшої обробки. З виходу БВНР сигнали подають на блок вимірювання глибини занурення (БВГЗ) і на блок вимірювання швидкості руху (БВШР). У блоці БВГЗ проводять рахунок імпульсів, що надходять від БВНР, перерахунок імпульсів в метричну величину і її перетворення в цифрову форму у вигляді паралельного коду. У блоці БВШР виконують вимірювання тривалості паузи між імпульсами, яка характеризує швидкість руху кліті, перерахунок часового параметра в швидкісний, і його перетворення в цифрову форму, також у вигляді паралельного коду. З виходу блоків БВГЗ і БВШР дані про глибину занурення кліті, напряму його руху і його швидкості надходять на блок введення-виводу БВВ. Даний блок виконує функцію перетворення цих інформаційних сигналів для передачі їх в обчислювальний блок (ОБ), а також на блок індикаторного пристрою локального відображення (ІПЛВ), де інформація про швидкість і глибину занурення відображається на цифрових індикаторах. У ОБ відбувається зберігання інформації, її обробка і відображення на екрані монітора. Джерела інформації: 1. Ивенский Ю. Н. Бесконтактные путевые переключатели. - М.: Энергия, 1971. - C. 116, 117, 126. 2. Патент 96072801 Україна. Спосіб та пристрій для оперативного визначення параметрів рідких та сипучих речовин. /Н. И. Чичикало, Б. З. Балтер, Ю. Г. Кожанов; Заявл. 12.07.96; Опубл. 31.08.98. - Бюл. № 4. 3. Патент 44406 Україна. Спосіб вимірювання швидкості руху і глибини занурення кліті при наземній установці підйомної машини /В. Ю. Ларін, В. П. Харченко, В. П. Квасніков; Заявл. 09.12.2008; Опубл. 12.10.2009. - Бюл. № 19. 4. Шахтные подъемные машины и лебедки /Отраслевой каталог. - М.: Изд. ЦНИИТЯЖМАШ, 1989 - С. 26-27. ФОРМУЛА ВИНАХОДУ 45 50 55 60 Універсальний спосіб вимірювання швидкості руху і глибини занурення кліті підйомної машини, який заснований на вимірюванні кількості та тривалості імпульсів від феромагнітного первинного перетворювача, який відрізняється тим, що приводні магнітні елементи закріплюють на однаковій відстані один від одного на поверхні стрічки з немагнітного матеріалу, яку розташовують по всій довжині ствола шахти, а два чутливі елементи феромагнітного первинного перетворювача, які розміщують безпосередньо на корпусі кліті, встановлюють один над одним на відстані не менше ширини приводного елемента, та на відстані від стрічки з приводними елементами, достатній для гарантованого спрацювання чутливих елементів феромагнітного перетворювача, вихідні сигнали якого через передавач транслюють бездротовим способом до приймача, який розташовують у верхній точці ствола шахти, і після перетворення ці сигнали послідовно подають на блоки визначення напряму руху, вимірювання глибини занурення, вимірювання швидкості руху та через блок виведення вимірювальної інформації передають на блок індикаторного пристрою локального відображення в цифровій формі інформації про швидкість руху кліті і глибину її занурення, а також виводять інформацію в обчислювальний блок для обробки і зберігання. 2 UA 101223 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюUniversal method for measurement of velocity of motion and depth of lowering of lift machine cage
Автори англійськоюLarin Vitalii Yuriiovych, Kharchenko Volodymyr Petrovych, Kvasnikov Volodymyr Pavlovych
Назва патенту російськоюУниверсальный способ измерения скорости движения и глубины погружения клети подъемной машины
Автори російськоюЛарин Виталий Юрьевич, Харченко Владимир Петрович, Квасников Владимир Павлович
МПК / Мітки
МПК: G01C 23/00
Мітки: спосіб, машини, занурення, кліті, вимірювання, глибини, швидкості, універсальний, підйомної, руху
Код посилання
<a href="https://ua.patents.su/5-101223-universalnijj-sposib-vimiryuvannya-shvidkosti-rukhu-i-glibini-zanurennya-kliti-pidjjomno-mashini.html" target="_blank" rel="follow" title="База патентів України">Універсальний спосіб вимірювання швидкості руху і глибини занурення кліті підйомної машини</a>
Спосіб вимірювання швидкості руху і глибини занурення кліті при наземній установці підйомної машини
Номер патенту: 44406
Опубліковано: 12.10.2009
Автори: Ларін Віталій Юрійович, Квасніков Володимир Павлович, Харченко Володимир Петрович
МПК: G01C 23/00
Мітки: руху, вимірювання, кліті, занурення, спосіб, підйомної, наземний, глибини, машини, швидкості, установці
Формула / Реферат:
Спосіб вимірювання швидкості руху і глибини занурення кліті при наземній установці підйомної машини, заснований на вимірюванні оборотів колеса, який відрізняється тим, що два чутливі елементи феромагнітного первинного перетворювача встановлюють один над одним на відстані не менше ширини осі колеса підйому, на віддаленні від площини колеса, достатньому для спрацьовування чутливих елементів феромагнітного перетворювача, і на відстані від вала...
Цифровий прилад вимірювання швидкості руху об’єктів
Номер патенту: 33444
Опубліковано: 25.06.2008
Автори: Наконечний Адріан Йосифович, Тишик Іван Ярославович
МПК: H03B 5/18
Мітки: цифровий, об'єктів, швидкості, руху, вимірювання, прилад
Формула / Реферат:
Цифровий прилад вимірювання швидкості руху об'єктів, що складається з послідовно з'єднаних приймача відбитого сигналу зондування, змішувача, вхід якого з'єднаний з виходом випромінювача разом з еталонним генератором, аналого-цифрового перетворювача та індикатора, який відрізняється тим, що додатково містить антиелайсінговий фільтр, вихід якого з'єднаний з входом аналогового перетворювача та послідовно з'єднаних дискретного...
Спосіб вимірювання швидкості руху зовнішнього об’єкта
Номер патенту: 49407
Опубліковано: 26.04.2010
Автори: Беленок Вадим Юрійович, Параніч Віктор Петрович, Бєлятинський Андрій Олександрович, Бурачек Всеволод Германович, Васильєв Олександр Павлович
МПК: G01P 3/42, G01S 13/92
Мітки: вимірювання, спосіб, об'єкта, швидкості, руху, зовнішнього
Формула / Реферат:
Спосіб вимірювання швидкості руху зовнішнього об'єкта, заснований на методі імпульсної локації об'єкта, який відрізняється тим, що при прийомі відбитого електромагнітного випромінювання змішану частоту імпульсів прямого й відбитого випромінювання пропускають через високочастотний фільтр, настроєний на подвійну частоту випромінювання, при цьому фіксують моменти появи подвійної частоти випромінювання й формують сигнали в ці моменти, які...
Спосіб вимірювання швидкості руху зовнішнього об’єкта
Номер патенту: 91661
Опубліковано: 10.08.2010
Автори: Бурачек Всеволод Германович, Параніч Віктор Петрович, Васильєв Олександр Павлович, Беленок Вадим Юрійович, Бєлятинський Андрій Олександрович
МПК: G01S 13/58
Мітки: вимірювання, об'єкта, руху, спосіб, зовнішнього, швидкості
Формула / Реферат:
Спосіб вимірювання швидкості руху зовнішнього об'єкта, заснований на методі імпульсної локації об'єкта, який відрізняється тим, що при прийомі відбитого електромагнітного випромінювання змішану частоту імпульсів прямого й відбитого випромінювання пропускають через високочастотний фільтр, настроєний на подвійну частоту випромінювання, при цьому фіксують моменти появи подвійної частоти випромінювання й формують сигнали в ті моменти, які...
Пристрій для просторового вимірювання швидкості та напряму руху водного потоку
Номер патенту: 96242
Опубліковано: 10.10.2011
Автори: Гладких Ігор Іванович, Сємака Олексій Миколайович, Бурачек Всеволод Германович
МПК: G01P 5/00
Мітки: просторового, напряму, швидкості, водного, руху, вимірювання, пристрій, потоку
Формула / Реферат:
Пристрій для просторового вимірювання швидкості та напряму руху водного потоку відносно підводного апарата, що містить випромінювачі і приймачі ультразвукового випромінювання, електронні засоби обробки інформації, який відрізняється тим, що він має шість ультразвукових блоків: два випромінювачі і чотири приймачі, які установлені в трьох взаємно перпендикулярних площинах так, що у горизонтальній та вертикальній площині траєкторії...
Попередній патент: Лінія для виробництва ігристого вина
Наступний патент: Пристрій для догляду за тваринами
Випадковий патент: Спосіб опису пристроїв кодування нерекурсивних згорнених кодів