Автоматизований стенд для стабілізації геометричних розмірів довгомірної звареної конструкції
Номер патенту: 91318
Опубліковано: 25.06.2014
Автори: Асташкін Володимир Ілліч, Лупкін Борис Володимирович, Подгребельний Микола Семенович, Корольков Юрій Якимович
Формула / Реферат
1. Автоматизований стенд для стабілізації геометричних розмірів довгомірної звареної конструкції, який характеризується тим, що містить віброамортизатори (1), призначені для установки на них оброблюваної довгомірної звареної конструкції (деталь) (2), віброзбудник (3) з вбудованим в ньому датчиком вимірювання частоти його коливань і виконаний з можливістю зміни частоти коливань електродинамічного типу, з частотою вібрації від 5 до 200 Гц, або електромагнітного типу, з частотою вібрації від 20 до 1000 Гц, з динамічним зусиллям від 10 до 2000 Η, до основи віброзбуджувача (3) приєднаний гідравлічний або пневматичний привід (4) захвата (5) для деталі (2), при цьому стенд має також системний блок управління (СБУ) (6), виконаний, наприклад, на базі мікропроцесорної техніки з можливістю програмування на той чи інший технологічний процес віброобробки, до якого приєднаний показуючий пристрій (7), наприклад комп'ютерний монітор або рідкокристалічний дисплей, для візуального контролю процесом зняття залишкових напруг оброблюваної деталі (2), а до СБУ (6), у свою чергу, підключені: блок приводів керування роботизованим маніпулятором (РМ) 9 і його системою позиціонування; датчик вимірювання частоти коливань віброзбуджувача; привід (4) захоплень (5) деталі (2); блок керування (8) підведенням стисненого повітря або гідрорідини до приводу (4); датчик вимірювання амплітуди коливання (9) деталі (2) на ділянці установки віброзбуджувача (3); датчик вимірювання залишкових напружень (10) в деталі (2).
2. Стенд за п. 1, який відрізняється тим, що віброзбудник (3) додатково забезпечений елементом кріплення (11) для його переміщення уздовж деталі (2).
3. Стенд за п. 1, який відрізняється тим, що датчик вимірювання амплітуди коливання (9) деталі (2) на ділянці установки віброзбуджувача (3) забезпечує вимірювання в діапазоні 0,1-5,0 мм з похибкою не більше ±10 %.
Текст
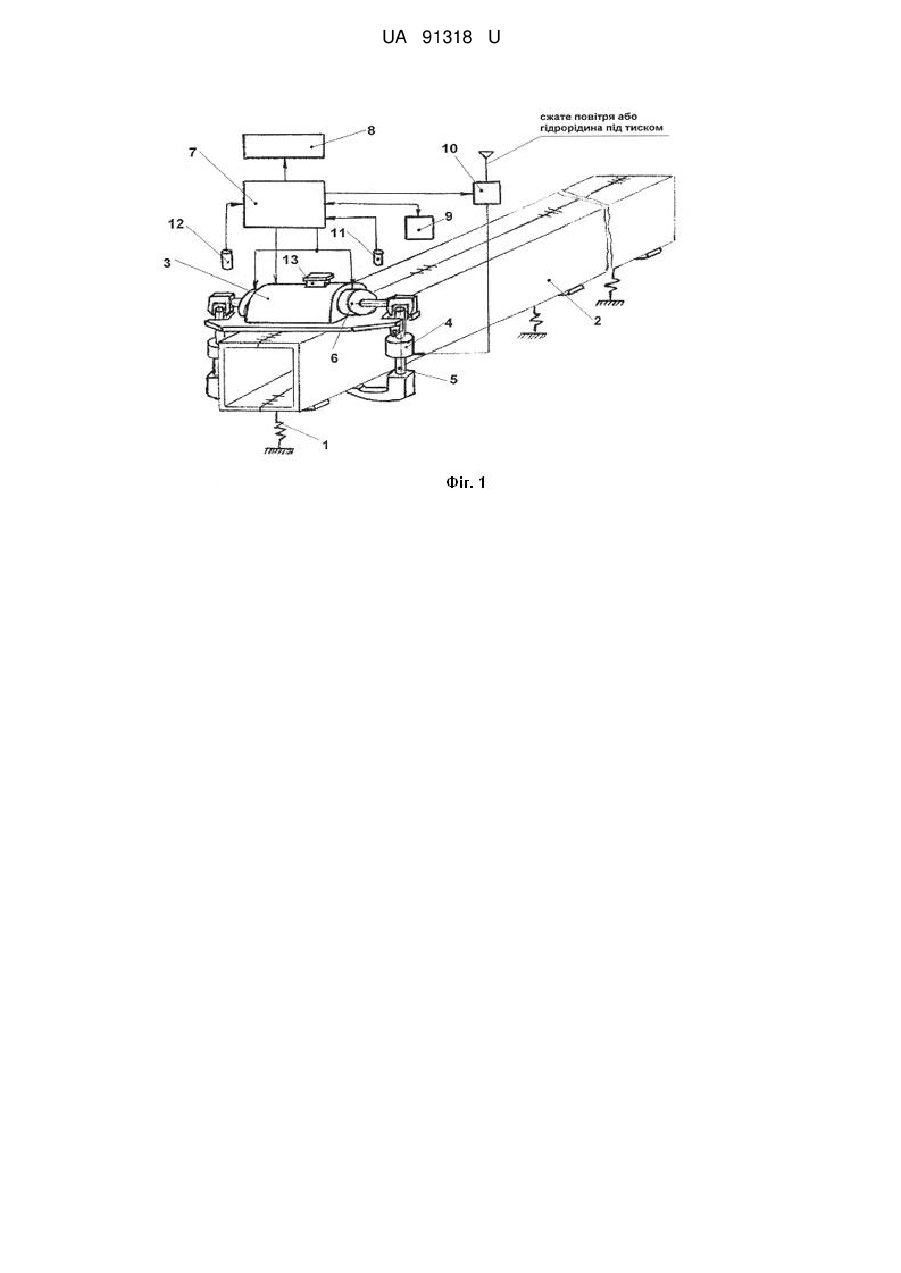
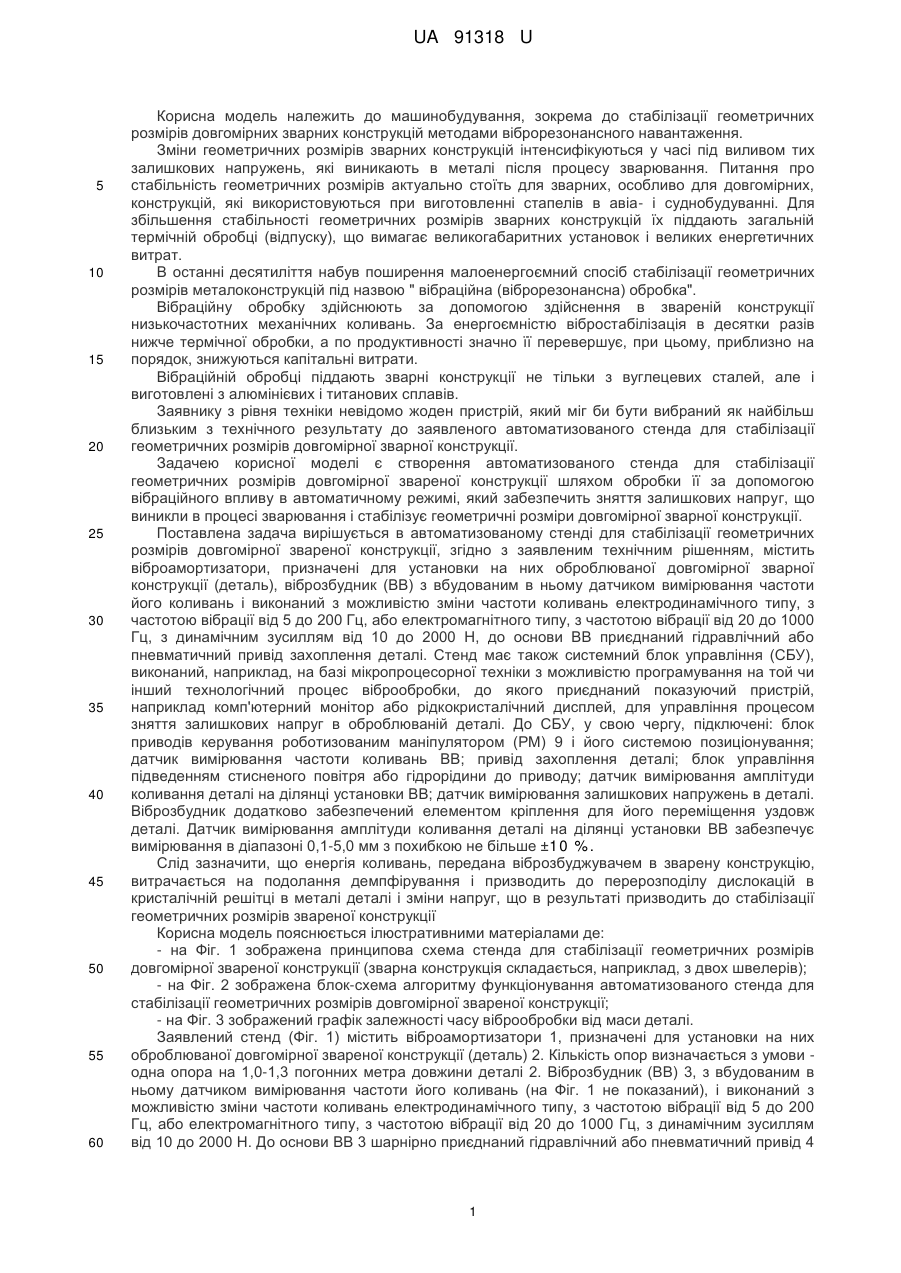
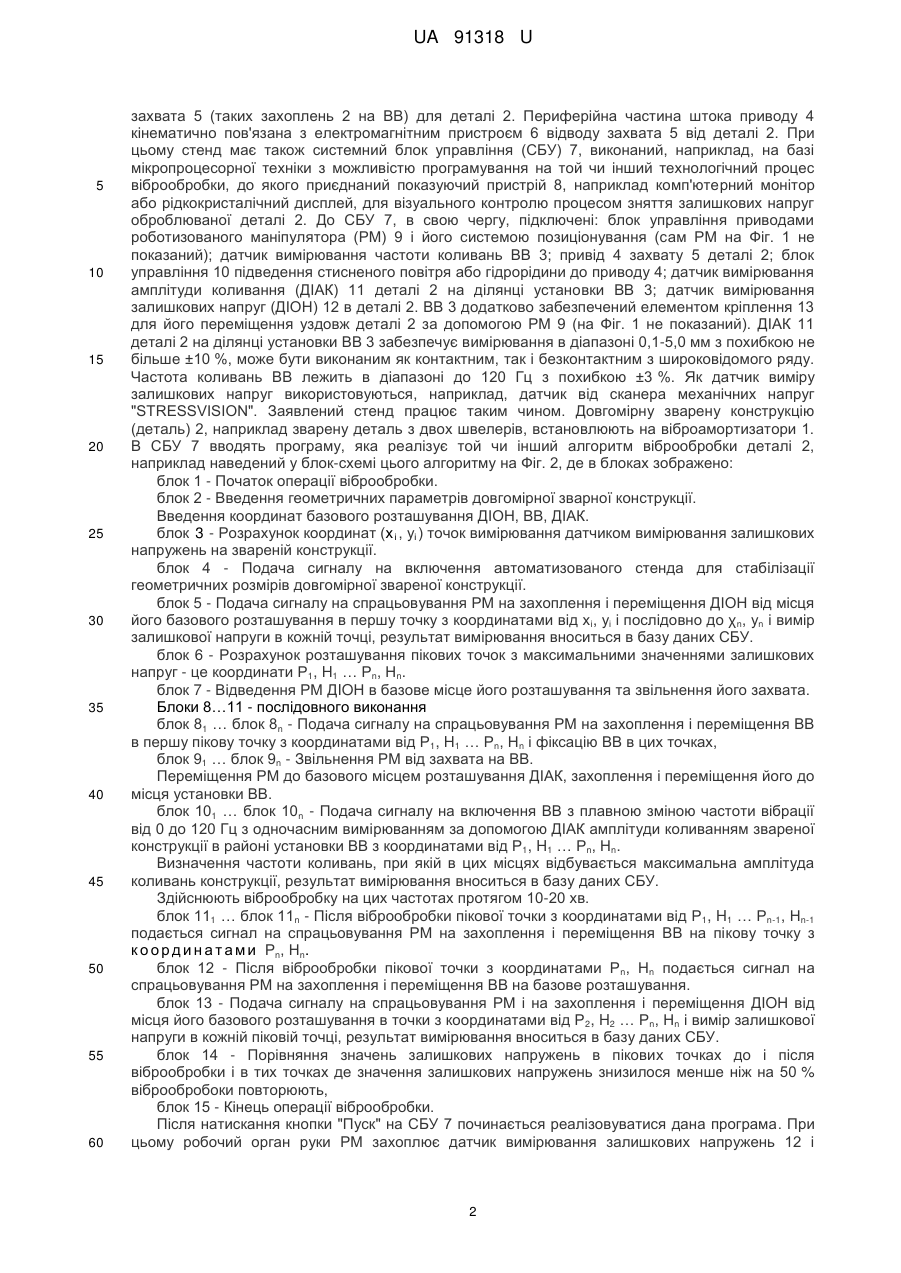
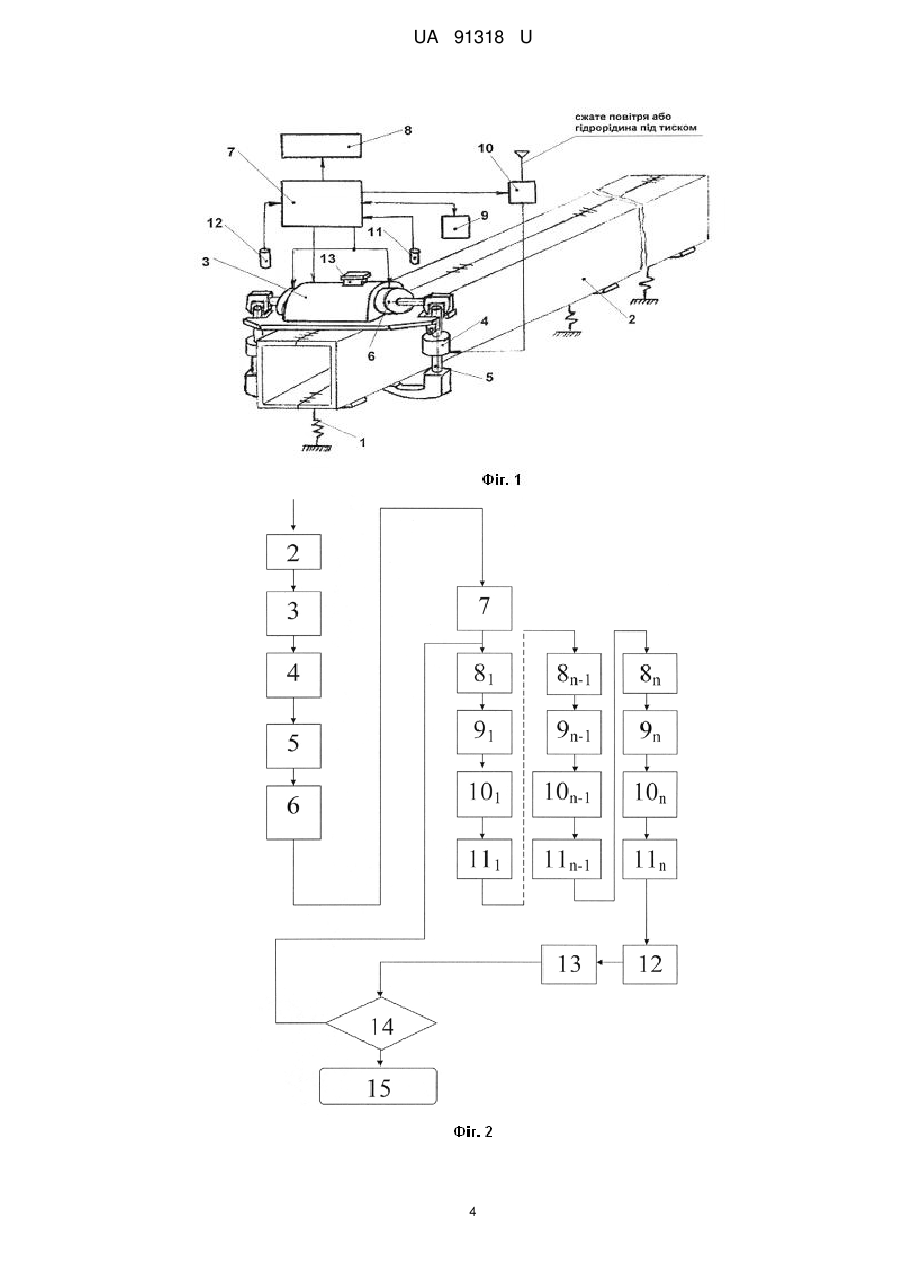
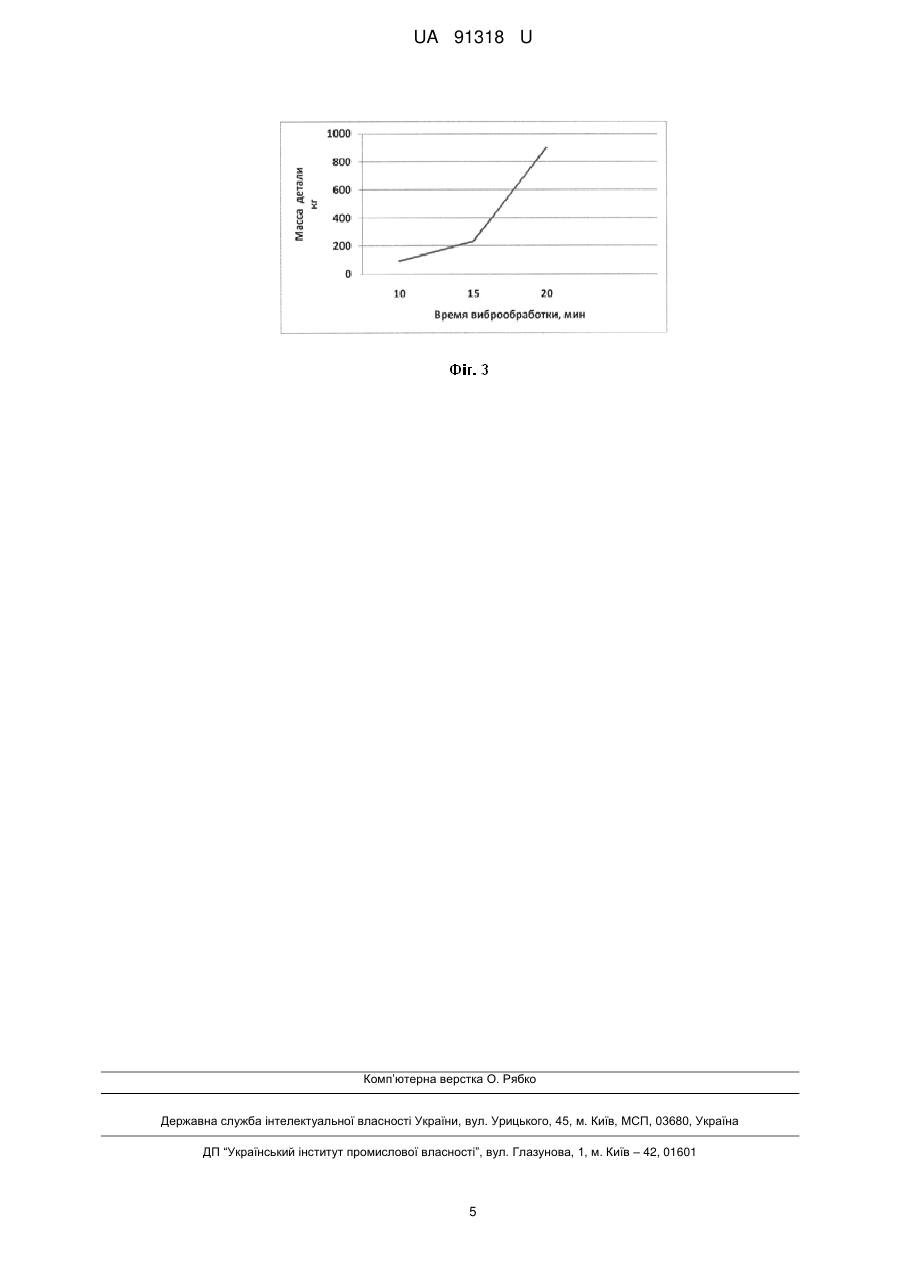
Реферат: Автоматизований стенд для стабілізації геометричних розмірів довгомірної звареної конструкції характеризується тим, що містить віброамортизатори, віброзбудник з вбудованим в ньому датчиком вимірювання частоти його коливань, пневматичний привід захвата для деталі. При цьому стенд має також системний блок управління, показуючий пристрій, блок керування, датчик вимірювання амплітуди коливання, датчик вимірювання залишкових напружень. UA 91318 U (12) UA 91318 U UA 91318 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до машинобудування, зокрема до стабілізації геометричних розмірів довгомірних зварних конструкцій методами віброрезонансного навантаження. Зміни геометричних розмірів зварних конструкцій інтенсифікуються у часі під виливом тих залишкових напружень, які виникають в металі після процесу зварювання. Питання про стабільність геометричних розмірів актуально стоїть для зварних, особливо для довгомірних, конструкцій, які використовуються при виготовленні стапелів в авіа- і суднобудуванні. Для збільшення стабільності геометричних розмірів зварних конструкцій їх піддають загальній термічній обробці (відпуску), що вимагає великогабаритних установок і великих енергетичних витрат. В останні десятиліття набув поширення малоенергоємний спосіб стабілізації геометричних розмірів металоконструкцій під назвою " вібраційна (віброрезонансна) обробка". Вібраційну обробку здійснюють за допомогою здійснення в звареній конструкції низькочастотних механічних коливань. За енергоємністю вібростабілізація в десятки разів нижче термічної обробки, а по продуктивності значно її перевершує, при цьому, приблизно на порядок, знижуються капітальні витрати. Вібраційній обробці піддають зварні конструкції не тільки з вуглецевих сталей, але і виготовлені з алюмінієвих і титанових сплавів. Заявнику з рівня техніки невідомо жоден пристрій, який міг би бути вибраний як найбільш близьким з технічного результату до заявленого автоматизованого стенда для стабілізації геометричних розмірів довгомірної зварної конструкції. Задачею корисної моделі є створення автоматизованого стенда для стабілізації геометричних розмірів довгомірної звареної конструкції шляхом обробки її за допомогою вібраційного впливу в автоматичному режимі, який забезпечить зняття залишкових напруг, що виникли в процесі зварювання і стабілізує геометричні розміри довгомірної зварної конструкції. Поставлена задача вирішується в автоматизованому стенді для стабілізації геометричних розмірів довгомірної звареної конструкції, згідно з заявленим технічним рішенням, містить віброамортизатори, призначені для установки на них оброблюваної довгомірної зварної конструкції (деталь), віброзбудник (ВВ) з вбудованим в ньому датчиком вимірювання частоти його коливань і виконаний з можливістю зміни частоти коливань електродинамічного типу, з частотою вібрації від 5 до 200 Гц, або електромагнітного типу, з частотою вібрації від 20 до 1000 Гц, з динамічним зусиллям від 10 до 2000 Н, до основи ВВ приєднаний гідравлічний або пневматичний привід захоплення деталі. Стенд має також системний блок управління (СБУ), виконаний, наприклад, на базі мікропроцесорної техніки з можливістю програмування на той чи інший технологічний процес віброобробки, до якого приєднаний показуючий пристрій, наприклад комп'ютерний монітор або рідкокристалічний дисплей, для управління процесом зняття залишкових напруг в оброблюваній деталі. До СБУ, у свою чергу, підключені: блок приводів керування роботизованим маніпулятором (РМ) 9 і його системою позиціонування; датчик вимірювання частоти коливань ВВ; привід захоплення деталі; блок управління підведенням стисненого повітря або гідрорідини до приводу; датчик вимірювання амплітуди коливання деталі на ділянці установки ВВ; датчик вимірювання залишкових напружень в деталі. Віброзбудник додатково забезпечений елементом кріплення для його переміщення уздовж деталі. Датчик вимірювання амплітуди коливання деталі на ділянці установки ВВ забезпечує вимірювання в діапазоні 0,1-5,0 мм з похибкою не більше ±1 0 % . Слід зазначити, що енергія коливань, передана віброзбуджувачем в зварену конструкцію, витрачається на подолання демпфірування і призводить до перерозподілу дислокацій в кристалічній решітці в металі деталі і зміни напруг, що в результаті призводить до стабілізації геометричних розмірів звареної конструкції Корисна модель пояснюється ілюстративними матеріалами де: - на Фіг. 1 зображена принципова схема стенда для стабілізації геометричних розмірів довгомірної звареної конструкції (зварна конструкція складається, наприклад, з двох швелерів); - на Фіг. 2 зображена блок-схема алгоритму функціонування автоматизованого стенда для стабілізації геометричних розмірів довгомірної звареної конструкції; - на Фіг. 3 зображений графік залежності часу віброобробки від маси деталі. Заявлений стенд (Фіг. 1) містить віброамортизатори 1, призначені для установки на них оброблюваної довгомірної звареної конструкції (деталь) 2. Кількість опор визначається з умови одна опора на 1,0-1,3 погонних метра довжини деталі 2. Віброзбудник (ВВ) 3, з вбудованим в ньому датчиком вимірювання частоти його коливань (на Фіг. 1 не показаний), і виконаний з можливістю зміни частоти коливань електродинамічного типу, з частотою вібрації від 5 до 200 Гц, або електромагнітного типу, з частотою вібрації від 20 до 1000 Гц, з динамічним зусиллям від 10 до 2000 Н. До основи ВВ 3 шарнірно приєднаний гідравлічний або пневматичний привід 4 1 UA 91318 U 5 10 15 20 25 30 35 40 45 50 55 60 захвата 5 (таких захоплень 2 на ВВ) для деталі 2. Периферійна частина штока приводу 4 кінематично пов'язана з електромагнітним пристроєм 6 відводу захвата 5 від деталі 2. При цьому стенд має також системний блок управління (СБУ) 7, виконаний, наприклад, на базі мікропроцесорної техніки з можливістю програмування на той чи інший технологічний процес віброобробки, до якого приєднаний показуючий пристрій 8, наприклад комп'ютерний монітор або рідкокристалічний дисплей, для візуального контролю процесом зняття залишкових напруг оброблюваної деталі 2. До СБУ 7, в свою чергу, підключені: блок управління приводами роботизованого маніпулятора (РМ) 9 і його системою позиціонування (сам РМ на Фіг. 1 не показаний); датчик вимірювання частоти коливань ВВ 3; привід 4 захвату 5 деталі 2; блок управління 10 підведення стисненого повітря або гідрорідини до приводу 4; датчик вимірювання амплітуди коливання (ДІАК) 11 деталі 2 на ділянці установки ВВ 3; датчик вимірювання залишкових напруг (ДІОН) 12 в деталі 2. ВВ 3 додатково забезпечений елементом кріплення 13 для його переміщення уздовж деталі 2 за допомогою РМ 9 (на Фіг. 1 не показаний). ДІАК 11 деталі 2 на ділянці установки ВВ 3 забезпечує вимірювання в діапазоні 0,1-5,0 мм з похибкою не більше ±10 %, може бути виконаним як контактним, так і безконтактним з широковідомого ряду. Частота коливань ВВ лежить в діапазоні до 120 Гц з похибкою ±3 %. Як датчик виміру залишкових напруг використовуються, наприклад, датчик від сканера механічних напруг "STRESSVISION". Заявлений стенд працює таким чином. Довгомірну зварену конструкцію (деталь) 2, наприклад зварену деталь з двох швелерів, встановлюють на віброамортизатори 1. В СБУ 7 вводять програму, яка реалізує той чи інший алгоритм віброобробки деталі 2, наприклад наведений у блок-схемі цього алгоритму на Фіг. 2, де в блоках зображено: блок 1 - Початок операції віброобробки. блок 2 - Введення геометричних параметрів довгомірної зварної конструкції. Введення координат базового розташування ДІОН, ВВ, ДІАК. блок 3 - Розрахунок координат (х і , уі ) точок вимірювання датчиком вимірювання залишкових напружень на звареній конструкції. блок 4 - Подача сигналу на включення автоматизованого стенда для стабілізації геометричних розмірів довгомірної звареної конструкції. блок 5 - Подача сигналу на спрацьовування РМ на захоплення і переміщення ДІОН від місця його базового розташування в першу точку з координатами від х і, уі і послідовно до χ n, уn і вимір залишкової напруги в кожній точці, результат вимірювання вноситься в базу даних СБУ. блок 6 - Розрахунок розташування пікових точок з максимальними значеннями залишкових напруг - це координати Р1, H1 … Ρn, Нn. блок 7 - Відведення РМ ДIOН в базове місце його розташування та звільнення його захвата. Блоки 8…11 - послідовного виконання блок 81 … блок 8n - Подача сигналу на спрацьовування РМ на захоплення і переміщення ВВ в першу пікову точку з координатами від Р1, H1 … Ρn, Нn і фіксацію ВВ в цих точках, блок 91 … блок 9n - Звільнення РМ від захвата на ВВ. Переміщення РМ до базового місцем розташування ДІАК, захоплення і переміщення його до місця установки ВВ. блок 101 … блок 10n - Подача сигналу на включення ВВ з плавною зміною частоти вібрації від 0 до 120 Гц з одночасним вимірюванням за допомогою ДІАК амплітуди коливанням звареної конструкції в районі установки ВВ з координатами від Р1, H1 … Ρn, Нn. Визначення частоти коливань, при якій в цих місцях відбувається максимальна амплітуда коливань конструкції, результат вимірювання вноситься в базу даних СБУ. Здійснюють віброобробку на цих частотах протягом 10-20 хв. блок 111 … блок 11n - Після віброобробки пікової точки з координатами від Р1, H1 … Ρn-1, Нn-1 подається сигнал на спрацьовування РМ на захоплення і переміщення ВВ на пікову точку з к о о р д и н а т а м и Ρn, Нn. блок 12 - Після віброобробки пікової точки з координатами Ρ n, Нn подається сигнал на спрацьовування РМ на захоплення і переміщення ВВ на базове розташування. блок 13 - Подача сигналу на спрацьовування РМ і на захоплення і переміщення ДIOН від місця його базового розташування в точки з координатами від Р2, H2 … Ρn, Нn і вимір залишкової напруги в кожній піковій точці, результат вимірювання вноситься в базу даних СБУ. блок 14 - Порівняння значень залишкових напружень в пікових точках до і після віброобробки і в тих точках де значення залишкових напружень знизилося менше ніж на 50 % віброобробоки повторюють, блок 15 - Кінець операції віброобробки. Після натискання кнопки "Пуск" на СБУ 7 починається реалізовуватися дана програма. При цьому робочий орган руки РМ захоплює датчик вимірювання залишкових напружень 12 і 2 UA 91318 U 5 10 15 20 25 30 35 40 45 підводить його до деталі 2 і послідовно проводить відповідні заміри за відповідною схемою замірів. Ця схема для кожного виду зварної деталі строго індивідуальна (підбирається). Для зварної деталі 2 (Фіг. 1) схема вимірювань залишкових напруг - це вздовж зварного шва, з обох сторін, з кроком 0,3-0,5 м або в шаховому порядку з тим же кроком, результати вимірювання вносяться в СБУ 7. Після цього СБУ 7 визначає точки, в яких значення залишкових напружень максимальні (пікові напруги). Захоплення руки РМ звільняється від датчика вимірювання залишкових напружень 12 в деталі 2 і захоплює ВВ 7 і встановлює на ділянку деталі 2 має перший пік залишкових напруг і закріплює його на деталі за допомогою послідовного включення електромагнітного пристрою 6 підведення під деталь 2 і притиснення захвата 5 до деталі 2. Робочий орган руки РМ звільняється від захвата 13 ВВ 3, захоплює датчик вимірювання амплітуди коливання 11 деталі 2 і встановлює його поблизу ВВ 3. У цей час від СБУ 7 подається сигнал на включення ВВ 7 у змінному режимі, при якому частота вібрації варіюється від 0 до 120 Гц. У цьому діапазоні за допомогою датчика вимірювання амплітуди коливання 11 визначається, при якій частоті система ВВ 7 и деталь 2 входить в резонанс, тобто коли амплітуда коливань стає максимальною. При цій частоті проводиться віброобробку в діапазоні 10-20 хв (залежно від загальної маси оброблюваної деталі, (див. Фіг. 3). Після цього, за сигналом від СБУ 7, ВВ 3 звільняється від захвата 5, а РМ послідовно прибирає датчик вимірювання амплітуди коливання 11 і ВВ 3 з цього місця переносить його на нове місце на деталі 2 з новим піком залишкових напруг. Процес обробки цієї ділянки повторюється і так на кожному піку залишкових напруг. Після того як оброблений останній пік і ВВ 3 буде прибраний з деталі 2, виконують повторний обмір залишкових напружень на деталі 2 за тією ж схемою. Якщо величина залишкових напруг на деталі 2 зменшилася менше ніж 50 %, то процес обробки повторюють. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Автоматизований стенд для стабілізації геометричних розмірів довгомірної звареної конструкції, який характеризується тим, що містить віброамортизатори (1), призначені для установки на них оброблюваної довгомірної звареної конструкції (деталь) (2), віброзбудник (3) з вбудованим в ньому датчиком вимірювання частоти його коливань і виконаний з можливістю зміни частоти коливань електродинамічного типу, з частотою вібрації від 5 до 200 Гц, або електромагнітного типу, з частотою вібрації від 20 до 1000 Гц, з динамічним зусиллям від 10 до 2000 Η, до основи віброзбуджувача (3) приєднаний гідравлічний або пневматичний привід (4) захвата (5) для деталі (2), при цьому стенд має також системний блок управління (СБУ) (6), виконаний, наприклад, на базі мікропроцесорної техніки з можливістю програмування на той чи інший технологічний процес віброобробки, до якого приєднаний показуючий пристрій (7), наприклад комп'ютерний монітор або рідкокристалічний дисплей, для візуального контролю процесом зняття залишкових напруг оброблюваної деталі (2), а до СБУ (6), у свою чергу, підключені: блок приводів керування роботизованим маніпулятором (РМ) 9 і його системою позиціонування; датчик вимірювання частоти коливань віброзбуджувача; привід (4) захоплень (5) деталі (2); блок керування (8) підведенням стисненого повітря або гідрорідини до приводу (4); датчик вимірювання амплітуди коливання (9) деталі (2) на ділянці установки віброзбуджувача (3); датчик вимірювання залишкових напружень (10) в деталі (2). 2. Стенд за п. 1, який відрізняється тим, що віброзбудник (3) додатково забезпечений елементом кріплення (11) для його переміщення уздовж деталі (2). 3. Стенд за п. 1, який відрізняється тим, що датчик вимірювання амплітуди коливання (9) деталі (2) на ділянці установки віброзбуджувача (3) забезпечує вимірювання в діапазоні 0,1-5,0 мм з похибкою не більше ±10 %. 3 UA 91318 U 4 UA 91318 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюAstashkin Volodymyr Illich
Автори російськоюАсташкин Владимир Ильич
МПК / Мітки
МПК: G01M 7/00
Мітки: автоматизований, стабілізації, геометричних, довгомірної, конструкції, стенд, розмірів, звареної
Код посилання
<a href="https://ua.patents.su/7-91318-avtomatizovanijj-stend-dlya-stabilizaci-geometrichnikh-rozmiriv-dovgomirno-zvareno-konstrukci.html" target="_blank" rel="follow" title="База патентів України">Автоматизований стенд для стабілізації геометричних розмірів довгомірної звареної конструкції</a>
Пристрій для вимірювання геометричних розмірів кварцових труб
Номер патенту: 11269
Опубліковано: 15.12.2005
Автори: Долина Віктор Георгійович, Аракелян Георгій Арменакович, Нагорна Діна Романівна, Колосова Олена Петрівна, Гришко Віктор Федорович, Варваров Олександр Федорович, Ярош Наталія Василівна
МПК: G01B 11/08, G01B 21/10
Мітки: труб, пристрій, геометричних, кварцових, розмірів, вимірювання
Формула / Реферат:
Пристрій для вимірювання геометричних розмірів кварцових труб, що містить послідовно і оптично з'єднані джерело світла (1), розсіювач (2), щілинну діафрагму (3), об'єктив (4), фотоприймач (6), а також послідовно з'єднані блок обробки відеосигналу (7), блок обчислень (8) і індикатор (9), який відрізняється тим, що пристрій додатково містить фільтр світла (5), який розміщений між об'єктивом (4) і фотоприймачем (6).
Пристрій для вимірювання геометричних розмірів прозорих труб
Номер патенту: 11268
Опубліковано: 15.12.2005
Автори: Ярош Наталія Василівна, Гришко Віктор Федорович, Варваров Олександр Федорович, Нагорна Діна Романівна, Колосова Олена Петрівна, Долина Віктор Георгійович, Аракелян Георгій Арменакович
МПК: G01B 21/10, G01B 9/00
Мітки: пристрій, вимірювання, труб, розмірів, геометричних, прозорих
Формула / Реферат:
Пристрій для вимірювання геометричних розмірів прозорих труб, що містить послідовно і оптично з'єднані джерело світла (1), розсіювач (2), щілинну діафрагму (3), об'єктив (4), фотоприймач (5), а також послідовно з'єднані блок обробки відеосигналу (6), блок обчислень (7) і індикатор (8), який відрізняється тим, що пристрій додатково містить задавач струму (9), вхід якого з'єднаний з другим виходом блока обчислень (7), а вихід з'єднаний із...
Пристрій для контролю лазерної системи виміру геометричних розмірів та якості поверхні деталей
Номер патенту: 85637
Опубліковано: 25.11.2013
Автори: Кондрашов Сергій Іванович, Бєлєвцова Анастасія Станіславівна, Давиденко Олександр Петрович, Григоренко Ігор Володимирович
МПК: G01B 11/30
Мітки: якості, виміру, контролю, системі, деталей, лазерної, поверхні, геометричних, пристрій, розмірів
Формула / Реферат:
Пристрій для контролю лазерної системи виміру геометричних розмірів та якості поверхні деталей, що містить лазерний канал, фокусуючу двоопуклу лінзу, світлоподільну лінзу, фокусуючі системи, еталонну за геометричними розмірами поверхню, системи відбиваючих дзеркал, світлоприймач, який відрізняється тим, що містить тестові зразкові ділянки фіксованого розміру, нанесені на еталонну поверхню, оптичний атенюатор, кубик Луммера-Бродхуна та блок...
Пристрій для вимірювання геометричних розмірів кварцових труб у процесі їх виготовлення
Номер патенту: 60867
Опубліковано: 25.06.2011
Автори: Лисиця Павло Михайлович, Лисиця Михайло Петрович
МПК: G01B 21/10
Мітки: вимірювання, кварцових, виготовлення, пристрій, процесі, труб, геометричних, розмірів
Формула / Реферат:
Пристрій для вимірювання геометричних розмірів кварцових труб у процесі їх виготовлення, що містить обчислювач, аналого-цифровий і цифро-аналоговий перетворювачі та індикатор результатів вимірювань, який відрізняється тим, що для вимірювання діаметра циліндричних виробів, у тому числі кварцових труб, у процесі їх формування із кварцового блока, де в зоні сформованої трубки температура досягає 1300 °С із значним її коливанням, із метою...
Рама палети звареної конструкції
Номер патенту: 66497
Опубліковано: 10.01.2012
Автори: Діордійчук Владислав Віталійович, Панібратова Наталя Олександрівна, Шкода Віталій Антонович
МПК: B22C 21/00
Мітки: рама, звареної, палети, конструкції
Формула / Реферат:
Рама палети звареної конструкції для транспортних систем автоматизованих формувальних ліній, що включає верхню горизонтальну плиту, приварені знизу до плити поздовжні й поперечні ребра, що утворюють стільникову конструкцію, яка відрізняється тим, що до ребер стільникової конструкції приварені додаткові плити таким чином, що утворюється "порожній замкнутий паралелепіпед", причому поперечні ребра, що розміщені обабіч повздовжнього...
Попередній патент: Спосіб лікування ішемічної хвороби серця у хворих з гіпофункцією щитоподібної залози
Наступний патент: Труба
Випадковий патент: Компактний електродуговий вібратор рідкого металу