Спосіб стабілізації польоту безпілотного літального апарата на траєкторіях баражування
Номер патенту: 93824
Опубліковано: 10.10.2014
Автори: Шмаров Валерій Миколайович, Семенченко Андрій Іванович, Романченко Ігор Сергійович, Валуйський Станіслав Вікторович, Данилюк Сергій Леонідович, Лисенко Олександр Іванович, Чумаченко Сергій Миколайович, Тачиніна Олена Миколаївна, Новіков Валерій Іванович, Нікулін Олександр Федорович
Формула / Реферат
Спосіб стабілізації польоту безпілотного літального апарата на траєкторіях баражування, який включає передавання сигналів про кутові швидкості, повітряний тиск, географічні координати місця положення від блока датчиків до аналого-цифрового перетворювача, передавання сигналів від аналого-цифрового перетворювача до обчислювального модуля, який автоматично оцінює кутове положення безпілотного літального апарата по параметрах курсу, крену, тангажа, поточної і заданої висоти, а також швидкості, автоматично обчислює розузгодження із заданою траєкторією і забезпечує автоматичне корегування положення безпілотного літального апарата у повітрі, забезпечує автоматичне формування та передавання управляючих сигналів через модуль сполучення до виконавчих механізмів, який відрізняється тим, що безпілотні літальні апарати додатково оснащують системою стабілізації польоту на траєкторіях баражування, якою під час польотів стійко оперативно автоматично аналізується інформація про небезпечний та безпечний повітряний простір, обчислюється зміна в часі помилки стеження та розузгодження із заданою енергозберігаючою траєкторією та забезпечується автоматичне формування, адаптація та передавання постійно оновлюваних залежно від зовнішніх умов управляючих сигналів на виконавчі механізми, під час отримання оптимального сигналу управління, який відповідає поточному ступеню збурення, рулі висоти, рулі напрямку та елементи механізації крила безпілотного літального апарата відхиляються на відповідні кути, що забезпечує його стабілізацію по кутах тангажа, рискання та по курсу.
Текст
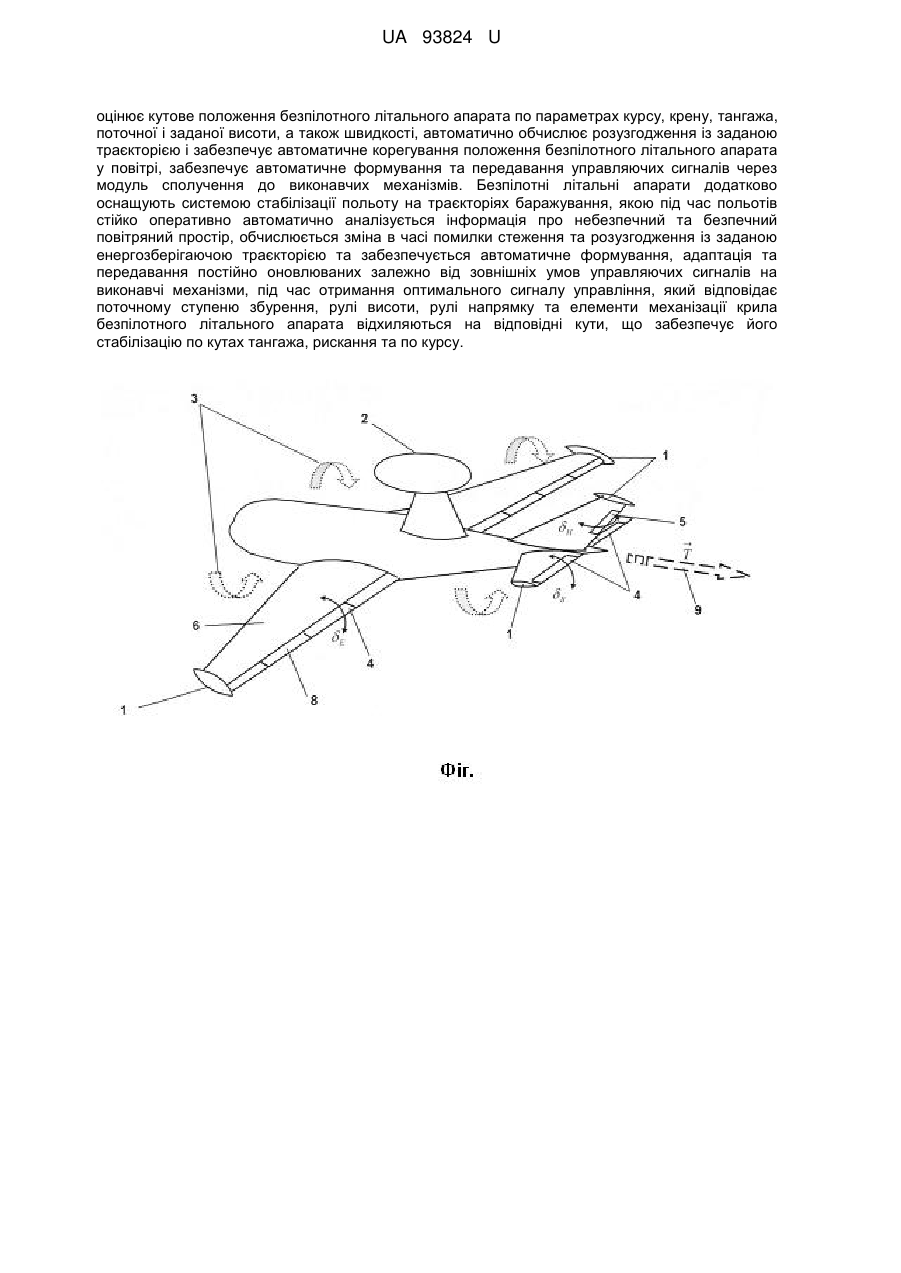
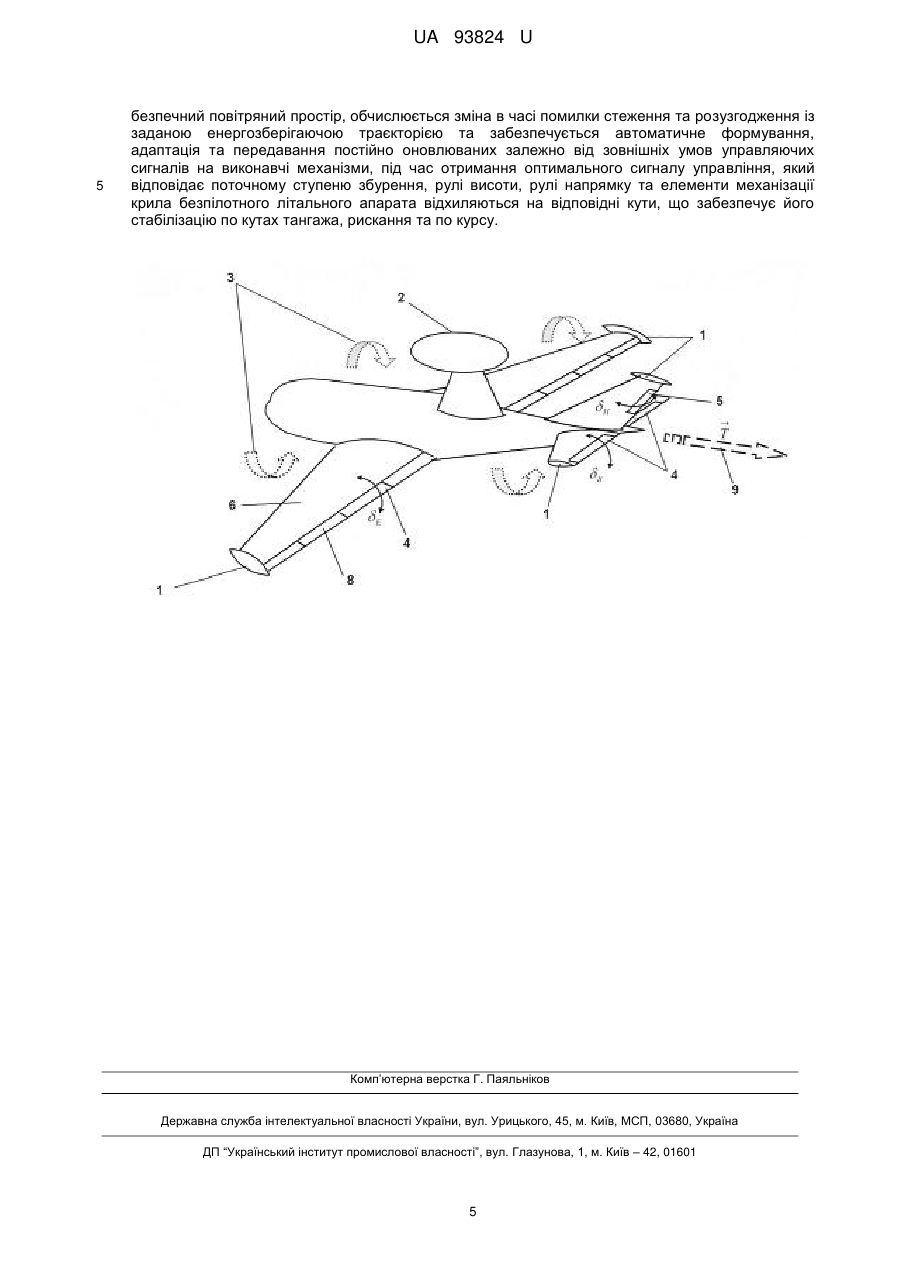
Реферат: Спосіб стабілізації польоту безпілотного літального апарата на траєкторіях баражування, який включає передавання сигналів про кутові швидкості, повітряний тиск, географічні координати місця положення від блока датчиків до аналого-цифрового перетворювача, передавання сигналів від аналого-цифрового перетворювача до обчислювального модуля, який автоматично UA 93824 U (12) UA 93824 U оцінює кутове положення безпілотного літального апарата по параметрах курсу, крену, тангажа, поточної і заданої висоти, а також швидкості, автоматично обчислює розузгодження із заданою траєкторією і забезпечує автоматичне корегування положення безпілотного літального апарата у повітрі, забезпечує автоматичне формування та передавання управляючих сигналів через модуль сполучення до виконавчих механізмів. Безпілотні літальні апарати додатково оснащують системою стабілізації польоту на траєкторіях баражування, якою під час польотів стійко оперативно автоматично аналізується інформація про небезпечний та безпечний повітряний простір, обчислюється зміна в часі помилки стеження та розузгодження із заданою енергозберігаючою траєкторією та забезпечується автоматичне формування, адаптація та передавання постійно оновлюваних залежно від зовнішніх умов управляючих сигналів на виконавчі механізми, під час отримання оптимального сигналу управління, який відповідає поточному ступеню збурення, рулі висоти, рулі напрямку та елементи механізації крила безпілотного літального апарата відхиляються на відповідні кути, що забезпечує його стабілізацію по кутах тангажа, рискання та по курсу. UA 93824 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі авіації, зокрема до способів автоматичного управління польотами безпілотних літальних апаратів, а саме до способів стабілізації (керування) польотами безпілотного літального апарата на траєкторіях баражування і може бути використаний з метою реалізації режимів координованих розворотів на траєкторіях баражування під час забезпечення тривалого радіозв'язку, моніторингу пошуково-рятувальних операцій під час ліквідації наслідків екологічного лиха, лісних та торф'яних пожарів, контролю технічного стану об'єктів, а також їх безпечного функціонування як на малих, так і на великих відстанях. Також корисна модель може бути застосована під час польотів на безпілотних літальних апаратах у процесі здійснення заходів щодо контролю за утилізації вибухових засобів, хімічних речовин тощо. Відомий спосіб управління динамічним об'єктом, який включає порівняння вектора станів об'єкта управління з вектором необхідних цільових значень. На основі отриманих результатів за допомогою нелінійної функції формують проміжний сигнал управління, який згодом оптимізують і уточнюють для забезпечення необхідних системі управління властивостей [патент РФ № 2302028, 27.06.2007 г., "Способ управления динамическими объектами", Винокуров Владимир Валентинович, Воробьев Александр Владимирович и др., "АВИОНИКА, Московский научнопроизводственный комплекс, ОАО]. Недоліком способу є неможливість адаптації побудованої системи управління до різних збурень об'єкта. Не можна стверджувати, що об'єкт управління залишається незмінним в процесі функціонування, а це є серйозним чинником, що впливає на такі показники якості управління, як точність і швидкість стабілізації керованого параметра. Відомий спосіб адаптивного управління динамічними системами і процесами, що включає визначення власних характеристик керованого об'єкта в процесі функціонування і подальше управління. У зазначеному способі пропонується виробляти попереднє управління об'єктом з метою підстроювання системи управління для досягнення найкращого результату [patent US № 4479176, 23.10.1984 у., "Adaptive control of a dynamic system or process", Kenneth P. Grimshaw, Metalogic Control Limited]. Недоліком даного способу є наявність значних тимчасових витрат на налаштування системи управління. Якщо функціонування об'єкта відбувається в швидкозмінних умовах, то подібна система може виявитися неефективною для забезпечення заздалегідь заданих показників якості управління. Найбільш близьким способом, як за суттю, так і за завданнями, що вирішуються, який вибраний за прототип, є спосіб, що включає передавання сигналів про кутові швидкості, повітряний тиск, географічні координати місця положення від блока датчиків до аналогоцифрового перетворювача, передавання сигналів від аналого-цифрового перетворювача до обчислювального модуля, який автоматично оцінює кутове положення безпілотного літального апарата по параметрах курсу, крену, тангажа, поточної і заданої висоти, а також швидкості, автоматично обчислює розузгодження із заданою траєкторією і забезпечує автоматичне корегування положення безпілотного літального апарата у повітрі, забезпечує автоматичне формування та передавання управляючих сигналів через модуль сполучення до виконавчих механізмів. [Патент РФ № 2310899, 27.08.2012 г., "Способ формирования интегрального адаптивного сигнала стабилизации планирующего движения беспилотного летательного аппарата и устройство для его осуществления", Сыров Анатолий Сергеевич, Пучков Александр Михайлович и др, Федеральное государственное унитарное предприятие Московское опытноконструкторское бюро "Марс"]. Недоліками відомого способу є обмеженість функціональних можливостей управління при істотній нестаціонарності параметрів безпілотного літального апарата і невисока точність за наявності збурень, що діють на безпілотний літальний апарат, наприклад вітрових поривів, що призводять до нестійкості плануючого руху. В основу корисної моделі поставлено задачу за рахунок змінювання чинних та здійснення додаткових технологічних операцій щодо оснащення безпілотних літальних апаратів додатковим обладнанням, а також автоматичного передавання сигналів від задатчиків до системи стабілізації енергозберігаючої траєкторії баражування оброблення цих сигналів та подавання оптимальних з точки зору діючих збурень сигналів управління від обчислювальних до виконавчих засобів стабілізації польоту забезпечити польоти (баражування) безпілотних літальних апаратів за оперативно обчисленими та заданими енергозберігаючими траєкторіями, покращити автономну маневреність безпілотних літальних апаратів у повітряному просторі в умовах турбулентної атмосфери, забезпечити зниження енерговитрат польотів у процесі керування польотами. 1 UA 93824 U 5 10 15 20 25 30 35 40 45 50 55 60 Поставлена задача розв'язується тим, що в способі стабілізації польоту безпілотного літального апарата на траєкторіях баражування, який включає передавання сигналів про кутові швидкості, повітряний тиск, географічні координати місця положення від блока датчиків до аналого-цифрового перетворювача, передавання сигналів від аналого-цифрового перетворювача до обчислювального модуля, який автоматично оцінює кутове положення безпілотного літального апарата по параметрах курсу, крену, тангажа, поточної і заданої висоти, а також швидкості, автоматично обчислює розузгодження із заданою траєкторією і забезпечує автоматичне корегування положення безпілотного літального апарата у повітрі, забезпечує автоматичне формування та передавання управляючих сигналів через модуль сполучення до виконавчих механізмів, згідно з корисною моделлю, безпілотні літальні апарати додатково оснащують системою стабілізації польоту на траєкторіях баражування, якою під час польотів стійко оперативно автоматично аналізується інформація про небезпечний та безпечний повітряний простір, обчислюється зміна в часі помилки стеження та розузгодження із заданою енергозберігаючою траєкторією та забезпечується автоматичне формування, адаптація та передавання постійно оновлюваних залежно від зовнішніх умов управляючих сигналів на виконавчі механізми, під час отримання оптимального сигналу управління, який відповідає поточному ступеню збурення, рулі висоти, рулі напрямку та елементи механізації крила безпілотного літального апарата відхиляються на відповідні кути, що забезпечує його стабілізацію по кутах тангажа, рискання та по курсу. Додаткове оснащення безпілотного літального апарата системою стабілізації польоту забезпечує стабілізацію польоту на траєкторіях баражування дозволяє забезпечити стійкість адаптивної системи керування, зменшити час її адаптації до збурень, зменшити середнє значення помилки стабілізації координат руху безпілотного літального апарата за весь час стабілізаційного процесу і як наслідок зменшення енергозатрат в процесі керування. Під час польоту складові елементи системи стабілізації польоту сприймають сигнали від зовнішніх датчиків про кутові швидкості, повітряний тиск, географічні координати місця положення від блока датчиків до аналого-цифрового перетворювача, передавання сигналів від аналого-цифрового перетворювача до обчислювального модуля, який автоматично оцінює кутове положення безпілотного літального апарата по параметрах курсу, крену, тангажа, поточної і заданої висоти, а також швидкості, автоматично обчислює розузгодження із заданою траєкторією і забезпечує автоматичне корегування положення безпілотного літального апарата у повітрі, забезпечує автоматичне формування та передавання управляючих сигналів через модуль сполучення до виконавчих механізмів. Системою стабілізації під час польотів стійко оперативно автоматично аналізується інформація про небезпечний та безпечний повітряний простір, обчислюється зміна в часі помилки стеження та розузгодження із заданою енергозберігаючою траєкторією та забезпечується автоматичне формування, адаптація та передавання постійно обновлюваних залежно від зовнішніх умов управляючих сигналів на виконавчі механізми через помножувачі, підсилювачі, інтегратори, блок задавання коефіцієнтів. Обчислення зміни в часі помилки стеження та розузгодження із заданою енергозберігаючою траєкторією надає можливість стабілізувати рух безпілотного літального апарата на заданій траєкторії баражування, тим самим зменшуючи енергозатрати в процесі керування. При цьому забезпечуючи безперебійний та своєчасний моніторинг заданих територій, контроль технічного стану об'єктів та стійкий радіозв'язок між заданими об'єктами. Автоматичне формування, адаптація та передавання постійно оновлюваних залежно від зовнішніх умов оптимальних управляючих сигналів дозволяє забезпечити стійкість адаптивної системи, зменшити час її адаптації до збурень, зменшити середнє значення помилки стабілізації координат руху безпілотного літального апарата за весь час стабілізаційного процесу. Подавання оптимальних управляючих сигналів на виконавчі механізми забезпечує своєчасне корегування траєкторії польоту за енергозберігаючою траєкторією. Постійне оновлювання оптимальних управляючих сигналів залежно від зовнішніх умов забезпечує коректне урахування будь-якої зміни впливу умов зовнішніх сприятливих і агресивних чинників на безпілотний літальний апарат. Суть способу пояснюється кресленням, де показано функціонування рулів висоти, рулів напрямку та елементів механізації крила безпілотного літального апарата залежно від сигналів управління, які стабілізують енергозберігаючу траєкторію польоту залежно від зовнішніх збурень. Спосіб стабілізації безпілотного літального апарата на траєкторіях баражування реалізується так. 2 UA 93824 U Процес керування безпілотним літальним апаратом описується рівнянням стану: X AX( t ) BE( t ) ( t ), (1) Y CX( t ) ( t ), де X R n - вектор стану БПЛА; E R n - вектор керування; Y - вектор вимірювань A( t ) , B( t ) - n n і n m матриці параметрів безпілотного літального апарата; та - вектор 5 10 шумів збурень та шумів вимірювання. Бажана динаміка польоту безпілотного літального апарата з урахуванням вимог, які пред'являються до системи: зменшення часу адаптації, зменшення середнього значення помилки вихідного сигналу безпілотного літального апарата за весь час стабілізаційного процесу і внаслідок чого зменшення енергозатрат у процесі керування задається за допомогою еталонної моделі: X M A M X M ( t ) B MU( t ) , (2) 15 де X M R n - вектор стану еталонної моделі, U R m - вектор керування, A M , BM , матриці відповідних розмірностей. Оптимальне значення показника якості функціонування системи автоматичного керування безпілотного літального апарата, а саме зменшення середнього значення помилки вихідного сигналу безпілотного літального апарата за весь час стабілізаційного процесу задається як формалізована ціль адаптивного керування: lim X( t ) 0 , (3) t де 20 25 30 35 X( t ) X( t ) XM ( t ) - помилки стеження та розузгодження із заданою траєкторією (2) і (3). Під час польоту безпілотного літального апарата вихідний сигнал U(t ) U задатчиків 1 подається до обчислювального модуля системи стабілізації польоту 2, в якому автоматично оцінюється кутове положення безпілотного літального апарата по параметрах курсу, крену, тангажа, поточної і заданої висоти, а також швидкості, обчислюється математична модель зміни в часі помилки стеження X та розузгодження із заданою траєкторією X( t ) X( t ) XM ( t ) та передається в контур адаптації в якому забезпечується автоматичне формування, адаптація та передавання постійно оновлюваних залежно від зовнішніх збурень 3 оптимальних управляючих сигналів на рулі висоти 4 (див. фіг. 1). Під час отримання оптимального сигналу управління, який відповідає поточному ступеню збурення, рулі висоти 4, рулі напрямку 5 та елементи механізації крила 6 безпілотного літального апарата відхиляються на відповідні кути, що забезпечує його стабілізацію по кутах тангажа, рискання та по курсу. Для системи керування в повздовжньому каналі безпілотного літального апарата розглядаються два режими: режим стабілізації висоти та кута тангажа, при керуванні швидкістю польоту через відхилення сектору тяги та режим стабілізації швидкості, при керуванні висотою польоту через відхилення рулів висоти 4. Для повздовжнього каналу вектор змінних стану має вигляд X T X u, w, q, ,H, , B , T , де u - швидкість відносно осі x , w - швидкість відносно осі z , q - кутова швидкість тангажа, - кут тангажа, H - висота, - частота обертання вихідного вала двигуна, B , T кути повороту вала рулів висоти 4. Вектор керування має вигляд 40 T T U B , T , а вектор виходу Y Va, , q, ,H , де - кут атаки, Va - дійсна повітряна швидкість. Для бокового каналу розглядається режим стабілізації кута рискання та крену через відхилення елеронів та руля напрямку. T X має вигляд X v,p,r, , , E , H , де v швидкість відносно осі y , p - кутова швидкість крену, r - кутова швидкість рискання, - кут крену, - кут рискання, E , H кути повороту вала рульових приводів. Вектор керування має Для бокового каналу вектор змінних стану 45 T , де E - кутове відхилення елеронів 8, H T вектор виходу Y , p, r, , , де - кут ковзання. вигляд U E , H 3 - відхилення руля напрямку 6, а UA 93824 U Ціль адаптивного керування (3) розв'язується за рахунок синтезу алгоритму обчислення ідеальних коефіцієнтів які реалізують ідеальний закон управління E( t ) K Ix X( t ) K IU X( t ) ,(4) де K Ix , K IU - ідеальні коефіцієнти, які задовольняють рівнянням: 5 BK Ix A M A, (5) BK IU B M . (6) На основі ідеального закону управління будується реальний закон управління E( t ) K x ( t )X( t ) K U ( t )X( t ) . (7) 10 Для режиму керування кутом тангажа при стабілізації повітряної швидкості система стабілізації обчислює ідеальні коефіцієнти та формує оптимальний закон керування рулем висоти та сектором тяги: B k 11u k 12 w k 13 q k 14 зад k 15 H k 16 k 17 B k 18 T , T k 21u k 22 w k 23 q k 24 k 25 H k 26 k 27 B k 28 T . 15 (8) Для режиму керування швидкістю при стабілізації висоти та для режиму керування висотою при стабілізації швидкості система стабілізації обчислює ідеальні коефіцієнти та формує оптимальний закон керування рулями висоти 4 та вектором тяги 9: B k 11u k 12 w k 13 q k 14 k 15 H k 16 k 17 B k 18 T , T uзад k 21u k 22 w k 23 q k 24 k 25 H k 26 k 27 B k 28 T , B k 11u k 12 w k 13 q k 14 Н k 15 H k 16 k 17 B k 18 T , (9) T k 21u k 22 w k 23 q k 24 k 25 H k 26 k 27 B k 28 T . Для бокового каналу при стабілізації кута рискання та крену система стабілізації 2 визначає ідеальні коефіцієнти та формує закон керування елеронами 8 та рулем напрямку 5: Е k11v k12p k13r k14 k15 зад k16 Е k17 Н, 20 25 30 Е k 21v k 22p k 23r k 24 k 25 зад k16 Е k 27 Н. (10) Суттєвою особливістю способу стабілізації безпілотного літального апарата на траєкторіях баражування є те, що вона здійснює автоматичне формування, адаптацію та передавання постійно оновлюваних залежно від зовнішніх збурень оптимальних управляючих сигналів, що дозволяє забезпечити стійкість адаптації системи стабілізації польоту, зменшення часу її адаптації до зовнішніх збурень, зменшення середнього значення помилки стабілізації координат руху безпілотного літального апарата за весь час стабілізаційного процес, тим самим зменшуючи енергозатрати в процесі керування. Таким чином, реалізація способу стабілізації безпілотного літального апарата на траєкторіях баражування вперше забезпечує виникнення найкращих показників польоту безпілотного літального апарата та забезпечує виконання широкого спектра завдань (забезпечення тривалого радіозв'язку, моніторингу пошуково-рятувальних операцій під час ліквідації наслідків екологічного лиха, лісних та торф'яних пожарів, контролю технічного стану об'єктів, а також їх безпечного функціонування як на малих, так і на великих відстанях, здійснення заходів щодо контролю за утилізації вибухових засобів, хімічних речовин тощо). 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Спосіб стабілізації польоту безпілотного літального апарата на траєкторіях баражування, який включає передавання сигналів про кутові швидкості, повітряний тиск, географічні координати місця положення від блока датчиків до аналого-цифрового перетворювача, передавання сигналів від аналого-цифрового перетворювача до обчислювального модуля, який автоматично оцінює кутове положення безпілотного літального апарата по параметрах курсу, крену, тангажа, поточної і заданої висоти, а також швидкості, автоматично обчислює розузгодження із заданою траєкторією і забезпечує автоматичне корегування положення безпілотного літального апарата у повітрі, забезпечує автоматичне формування та передавання управляючих сигналів через модуль сполучення до виконавчих механізмів, який відрізняється тим, що безпілотні літальні апарати додатково оснащують системою стабілізації польоту на траєкторіях баражування, якою під час польотів стійко оперативно автоматично аналізується інформація про небезпечний та 4 UA 93824 U 5 безпечний повітряний простір, обчислюється зміна в часі помилки стеження та розузгодження із заданою енергозберігаючою траєкторією та забезпечується автоматичне формування, адаптація та передавання постійно оновлюваних залежно від зовнішніх умов управляючих сигналів на виконавчі механізми, під час отримання оптимального сигналу управління, який відповідає поточному ступеню збурення, рулі висоти, рулі напрямку та елементи механізації крила безпілотного літального апарата відхиляються на відповідні кути, що забезпечує його стабілізацію по кутах тангажа, рискання та по курсу. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюRomanchenko Ihor Serhiiovych, Lysenko Oleksandr Ivanovych
Автори російськоюРоманченко Игорь Сергеевич, Лысенко Александр Иванович
МПК / Мітки
МПК: B64C 17/00, B64C 19/00, G01C 21/34
Мітки: траєкторіях, спосіб, апарата, баражування, стабілізації, польоту, літального, безпілотного
Код посилання
<a href="https://ua.patents.su/7-93824-sposib-stabilizaci-polotu-bezpilotnogo-litalnogo-aparata-na-traehktoriyakh-barazhuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб стабілізації польоту безпілотного літального апарата на траєкторіях баражування</a>
Система стабілізації безпілотного літального апарата на траєкторіях баражування
Номер патенту: 91812
Опубліковано: 10.07.2014
Автори: Шмаров Валерій Миколайович, Тачиніна Олена Миколаївна, Чумаченко Сергій Миколайович, Данилюк Сергій Леонідович, Новіков Валерій Іванович, Лисенко Олександр Іванович, Валуйський Станіслав Вікторович, Романченко Ігор Сергійович, Семенченко Андрій Іванович, Кірчу Павло Іванович
МПК: B64C 17/00, B64C 19/00
Мітки: апарата, система, траєкторіях, баражування, безпілотного, стабілізації, літального
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата на траєкторіях баражування, що містить задатчик, перший суматор, регулятор, об'єкт регулювання, інтегратор, другий суматор, причому вихід задатчика пов'язаний з підсумовуючим входом першого суматора, вихід якого підключений до входу регулятора, вихід регулятора з'єднаний з входом об'єкта регулювання і першим входом другого суматора, вихід об'єкта регулювання з'єднаний з другим входом...
Спосіб зниження енерговитрат польоту безпілотного літального апарата
Номер патенту: 91443
Опубліковано: 10.07.2014
Автори: Романченко Ігор Сергійович, Семенченко Андрій Іванович, Данилюк Сергій Леонідович, Новіков Валерій Іванович, Чумаченко Сергій Миколайович, Тачиніна Олена Миколаївна, Кірчу Павло Іванович, Валуйський Станіслав Вікторович, Лисенко Олександр Іванович, Шмаров Валерій Миколайович
МПК: H04W 16/10, H04W 84/00, H04W 8/02, H04W 8/08, H04W 28/08
Мітки: апарата, літального, безпілотного, енерговитрат, польоту, спосіб, зниження
Формула / Реферат:
Спосіб зниження енерговитрат польоту безпілотного літального апарата, що включає передавання сигналів про кутові швидкості, повітряний тиск, географічні координати місця положення від блока датчиків до аналого-цифрового перетворювача, передавання сигналів від аналого-цифрового перетворювача до обчислювального модуля, який автоматично оцінює кутове положення безпілотного літального апарата по параметрах курсу, крену, тангажу, поточної і...
Система стабілізації безпілотного літального апарата
Номер патенту: 65285
Опубліковано: 25.11.2011
Автори: Субота Анатолій Максимович, Кописов Олег Едуардович, Льовкін Сергій Генадійович
МПК: B64C 13/00
Мітки: літального, безпілотного, система, стабілізації, апарата
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить послідовно з'єднані обчислювач, підсилювач, рульову машину, орган управління та датчик кута, датчик кутової швидкості, яка відрізняється тим, що містить задатчик, вихід якого з'єднаний з входом обчислювача, вихід рульової машини одночасно з'єднаний з входом органа управління і через перший перетворювач з'єднаний з входом адаптивного контура, а вихід органа управління з'єднаний...
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Амелін Сергій Вікторович, Бандура Іван Миколайович, Антошик Вікторія Миколаївна
МПК: B64C 13/00, G05D 1/03
Мітки: стабілізації, апарата, літального, система, безпілотного
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Бандура Іван Миколайович, Величко Надія Вікторівна
МПК: B64C 13/00, G05D 1/03
Мітки: безпілотного, стабілізації, апарата, літального, система
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Попередній патент: Пристрій для кріплення натяжних стель з полімерних матеріалів
Наступний патент: Спосіб виробництва заморожених м’ясних посічених напівфабрикатів
Випадковий патент: Капсула для лікування дизурії, що містить гранульовану індолінову сполуку - блокатор a-адренорецепторів